考慮油液黏溫特性的電靜液作動器流量死區動態逆補償方法
2022-05-22 09:33:48韓小霞馮永保謝建魏列江王亞強魏小玲
兵工學報 2022年2期
關鍵詞:系統
韓小霞 ,馮永保 ,謝建 ,魏列江 ,王亞強 ,魏小玲
(1.火箭軍工程大學 導彈工程學院,陜西 西安 710025;2.蘭州理工大學 能源與動力工程學院,甘肅 蘭州 730050;3.中國重型機械研究院股份公司,陜西 西安 710032)
0 引言
電靜液作動器(EHA)是典型的高度集成化小型閉式液壓系統,其輸入能源為電能,首先通過電機將電能轉換為機械能,接著通過液壓泵將機械能轉化為液壓能,最后由液壓缸將液壓能轉化為機械能,其中電機、液壓泵和液壓缸是3 個核心元件。在能量轉換和傳遞過程中存在功率損失,從而產生熱量。由于EHA 的高度集成化和小型化,在減小體積和質量的同時減小了散熱面積,使得自身散熱能力受到限制,導致一部分熱量滯留在EHA 的密閉腔體內,從而導致EHA 系統的油溫快速上升,影響著運行安全,因此液壓油液溫度(以下簡稱油溫)對EHA 系統性能的影響和補償是亟待解決的問題。
EHA 系統熱特性問題已經逐漸得到了部分學者們的重視。根據文獻[1 -2]可知,當EHA 長時間或大負載條件下工作時,液壓系統中溫度上升速度較快,且每個元件的溫度并不相同,其中液壓泵的出口溫度最高達到了117 ℃,這一溫度值遠遠超過了液壓油液的最佳溫度范圍40 ℃~60 ℃。文獻[3]從結構角度出發,對EHA 整體結構進行了優化,仿真結果表明,優化后EHA 結構整體的穩態和瞬態熱分析最高點溫度均較大幅度降低。文獻[4]仿真分析了EHA 的溫度場熱分布圖,得到了EHA 中溫度最高點(電機定子)和最低點(液壓泵部分外殼)處的溫度值分別為159.4 ℃和47.6 ℃。文獻[5]采用集總參數法建立了EHA 液壓系統熱力學模型,并通過ANSYS 軟件仿真結果驗證了集總參數法的可行性。以上研究分析僅停留在結構仿真研究層面。
當液壓油溫升高時,液壓油的黏度及密度將隨之改變。液壓油液的動力黏度μ是由油液本身固有的物理性質所決定的物理量,μ值大小是油液黏度大小的一種直接衡量,也是流體在運動中抵抗剪切變形能力強弱的一種度量。油液μ值的大小隨壓力和溫度的不同而變化,根據文獻[6],溫度對μ的影響較大,且隨著溫度的升高,μ值減小。
Sun 等[7]研究表明液壓系統油溫會引起油液黏度特性發生變化,從而影響著液壓元件的性能和測試臺的測量數據精度,等同于液壓測試過程中液壓元件為變參數模塊。王亞強[8]研究表明液壓泵的流量死區寬度隨油溫的增大而增大,其中,液壓泵泄漏流量(以下簡稱泄漏量)是造成EHA 的流量死區的主要因素,并基于液壓泵泄漏量模型提出了一種EHA 速度死區的補償方法。文獻[9]分析了外嚙合齒輪泵能量損失,并建立了泄漏量數學模型,研究得到了最佳端面間隙和徑向間隙,但在實驗研究中并未考慮油溫變化。文獻[10] 在外嚙合齒輪泵容積效率試驗結果的基礎上,對所建立的泄漏量理論模型經復合形法參數尋優得到優化后的數學模型,并得到了齒輪泵容積效率隨轉速和壓力的變化規律,但未分析油溫變化對齒輪泵容積效率的影響。Shi等[11]研究了考慮泄漏和摩擦的軸向柱塞泵熱-液模型,仿真結果表明,溫度對泵的機械損耗影響較小,但對泵容積效率有很大的影響。對于齒輪泵泄漏特性的大多數研究中,或者將油液黏度作為一個恒定值,或者將溫度作為恒定值,將工作過程中的液壓泵近似為與溫度無關的參數恒定模塊。在實際應用中,EHA 系統中液壓油溫變化尤其明顯,溫度變化使得液壓泵和液壓缸等的泄漏特性發生變化,從而導致EHA 系統表現出變流量死區特性。
Xu 等[12]提出增加高頻、小幅度的抖動信號來改善電液伺服系統的死區非線性,得到了一定的效果,但這種方法并不能實時抵消每個時刻處的死區非線性,因為電液伺服系統的死區非線性并不是固定值,而是隨時間變化的。Gu 等[13]在考慮閥控電液系統的參數不確定性、不確定干擾、輸入飽和與閥死區因素時,基于反步技術提出了集成光滑死區逆模型和動態附加系統的魯棒自適應控制器,通過仿真和實驗驗證了所提控制器的有效性,但所提光滑死區逆模型參數是通過自適應參數估計得到的,補償效果依賴與算法性能的好壞。王立新等[14]為存在比例閥死區、參數不確定和未知內外部干擾的電液位置伺服系統設計了一種基于死區補償的串聯控制器,該控制器由自抗擾控制器和死區逆補償器構成;然而,通過特定實驗辨識得到的死區逆參數并不能覆蓋電液伺服系統全工況。文獻[15]和文獻[16]從控制角度對電液伺服系統中存在的非線性死區進行了補償研究。但上述文獻中并沒有研究在運行過程中的溫度變化給電液控制系統死區所帶來的影響。
本文在分析EHA 系統的流量死區特性形成機理的前提下,并考慮油溫黏特性時,對系統流量死區進行數學建模,從而提出一種基于模型信息的流量死區補償方法,通過仿真分析和實驗研究驗證所提補償方法的可行性和有效性。
1 EHA 系統流量死區機理分析
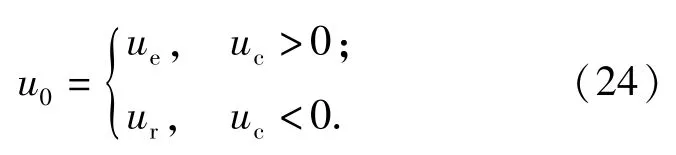
如圖1 所示為EHA 系統原理圖。本文中采用的液壓泵為雙向齒輪泵。圖1 中:ph和pl分別為液壓泵高壓腔和低壓腔的壓力,qo和qp分別為液壓泵輸出流量和泄漏流量;A 和B 分別表示液壓缸的兩腔;pA、pB、qA和qB分別為液壓缸兩腔的壓力和流量;qc為液壓缸內泄漏流量;x為活塞桿位移;qe為EHA 系統有效流量;Vp和Vc分別為液壓泵出口容腔和液壓缸無桿側容腔,F1為外負載力,M 為外負載。EHA 處于靜態時,其液壓缸的高壓腔處于靜態保壓狀態,動態控制期間高壓腔的壓力隨外負載力Fl變動;當從保壓狀態過渡到動態控制的過程時,要求單向閥開啟并輸出流量。
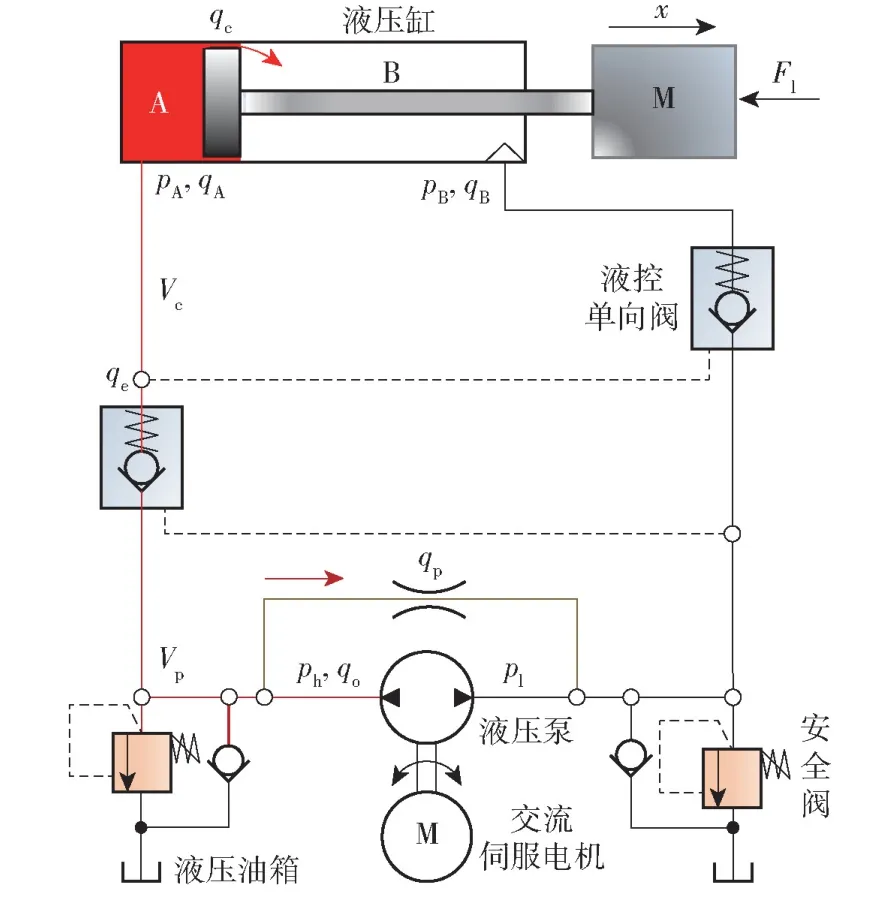
圖1 EHA 系統原理圖(紅色線條及紅色區域分別表示高壓管路和高壓容腔)Fig.1 Schematic diagram of EHA system (red line:highpressure pipe;red zone:high-pressure container)
依據單向閥是否開啟,將EHA 的啟動分為兩個階段:1)液壓泵出口容腔的充液建壓階段;2)單向閥輸出有效流量及之后的階段。在階段1 中,電動機驅動液壓泵從靜止開始轉動,液壓泵輸出流量進入容腔Vp中,直至ph等于負載壓力,這一階段同時經歷壓縮和泄漏兩個過程,壓縮使Vp容腔的壓力升高并加劇泄漏,使Vp容腔的建壓速度減緩。液壓泵出口容腔充液建壓過程中,液壓泵的有效流量輸出為0 L/min,即液壓泵處于流量死區。在階段2 中,液壓缸無桿側容腔Vc開始接受有效的高壓油液,并有相應的速度輸出,液壓泵輸出流量依舊有一部分用于補充自身壓縮和泄漏,以及液壓閥和液壓缸處的壓縮和泄漏流量。從以上分析可以看出,EHA 系統的流量死區主要由系統中油液的壓縮和泄漏造成。液壓閥(液控單向閥、安全閥和單向閥等)的控制流量中,內泄漏量占比極小,對系統執行元件運動速度的影響可忽略不計[17];而液壓缸的內泄漏流量對自身的性能有著較大的影響[18]。因此,本文主要研究液壓泵和液壓缸的泄漏流量對單桿EHA 系統流量死區的影響。
2 EHA 系統流量死區模型建立
EHA 系統數學模型可由各模塊串聯求得。根據EHA 系統流量死區機理分析結果,建模過程僅考慮正常工況,忽略單向閥、安全閥等液壓件對系統的影響。
2.1 齒輪泵
在EHA 工作過程中,齒輪泵的總流量主要由實際輸出流量、泄漏流量和壓縮流量三部分組成,即齒輪泵的流量連續性方程為

式中:n為齒輪泵的轉速(r/s);Dp為齒輪泵的排量;qs為齒輪泵的壓縮流量。從(1)式中可以看出,齒輪泵泄漏量的大小直接影響著其輸出流量死區。
在EHA 系統正常工作時,齒輪泵外泄漏量占比很小[19],本文建模時忽略齒輪泵的外泄漏量和嚙合點處的微量泄漏。齒輪泵的內漏主要包括端面泄漏、齒頂間隙泄漏[20]。齒輪泵低壓腔壓力pl不可忽略。根據文獻[6],得到齒輪泵的流量泄漏模型為

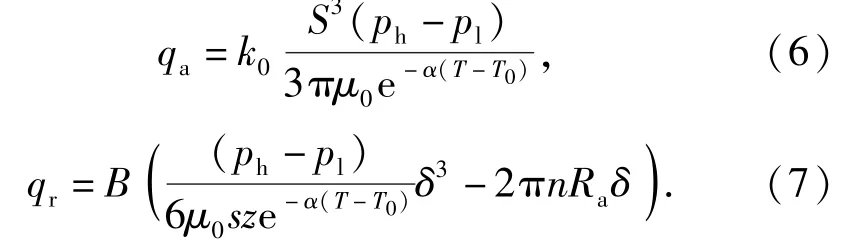
式中:qa為齒輪泵端面間隙泄漏流量,

S和μ分別為齒輪泵端面間隙和液壓油黏度,k0為齒輪泵自身結構決定的參數,
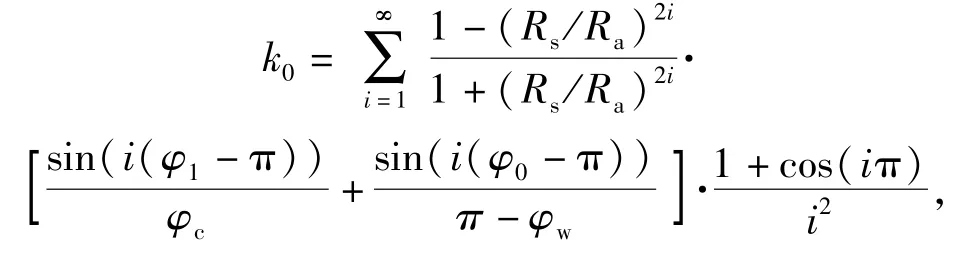
Rs為齒輪泵的齒輪軸半徑(m),Ra為齒頂圓半徑(m),φw、φc分別為齒輪泵高壓區包角、節圓齒厚弦角(rad),i為無窮級數項序,i=1 000 時對k0的精度影響極小;qr為齒輪泵徑向間隙泄漏流量(m3/s),

δ、B和s分別為徑向間隙、齒寬、齒頂厚,z為齒輪泵過渡區齒數。根據文獻[21 -22]可知,相對于溫度,壓力對油液黏度μ的影響極小,故忽略壓力對黏度的影響,可得

式中:μ0為油液在一個大氣壓、T0溫度下的動力黏度(Pa·s),本文T0取40 ℃;α為油液黏溫系數;T為油溫(℃);
因此(3)式和(4)式可寫為
在圖1 所示的EHA 系統原理圖中,齒輪泵的進口壓力pl不可忽略。記Δp=ph-pl,根據文獻[8],(7)式可以整理為

式中:kd為油液在一個大氣壓、T0溫度下的齒輪泵壓差流泄漏量系數,kd=;ks為齒輪泵剪切流泄漏系數,且齒輪泵剪切流泄漏與壓差流泄漏方向相反,故取負,即ks=-2πBRaδ。從(8)式可知齒輪泵的泄漏流量是關于油溫、泵進出口壓差和轉速的函數。
2.2 液壓缸
忽略液壓缸外泄漏流量,流入和流出液壓缸的流量連續性方程可表示為(9)式和(10)式。

式中:Ap為液壓缸無桿腔的有效面積;VA0為液壓缸無桿腔的初始容積;VA,p為液壓缸無桿腔連接管路的容積;βe為油液體積彈性模量。

式中:Ar為液壓缸有桿腔的有效面積;VB0為液壓缸有桿腔的初始容積;VB,p為液壓缸有桿腔連接管路的容積。
液壓缸活塞桿伸出和縮回時,活塞與缸體之間的泄漏流量可等效為環形縫隙泄漏[23],表示為

式中:D為活塞直徑;h為縫隙高度;l為縫隙長度。因與齒輪泵直接相連,則有pA=ph,pB=pl。
根據圖1 可知,當活塞桿伸出時,qe=qo=qA,則液壓缸無桿腔流量連續性方程為
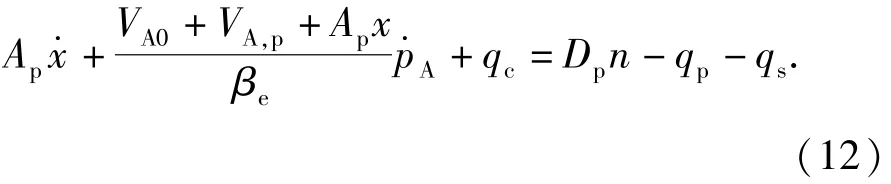
根據(12)式可得
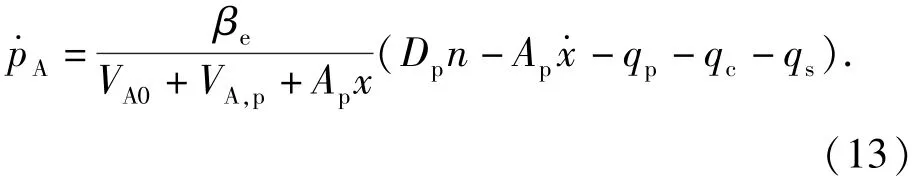
從(13)式中可以看出,當齒輪泵輸入轉速低于某一臨界值時,齒輪泵無輸出流量,EHA 系統無建壓,即EHA 系統的輸入信號(電機驅動器電壓)低于某一臨界值時,EHA 無輸出。
根據(13)式可得,活塞桿伸出時EHA 系統有效輸出流量為

EHA 液壓系統具有大慣量、強非線性和強外負載干擾特性。與液壓系統相比,伺服電機響應更快,慣量和非線性均較小,為簡化建模,將交流伺服電機等效為比例環節。因此交流伺服電機的轉速n[24]可表示為

式中:Ku為增益系數;u(t)為伺服電機驅動器輸入電壓。將(15)式代入(14)式,可得

在EHA 系統的流量死區節點處,即在t=te時刻,假設伺服電機輸入電壓為u(te)=ue、轉速為n(te)=ne,此時系統流量qe=0,其中,下標e 表示活塞桿處于伸出行程。當忽略壓縮流量qs時,記k=πDh3/(12μ0eαT0l),根據(16)式、(11)式和(8)式,得到

同理可得活塞桿縮回時流量死區節點處的電壓值ur為

式中:下標r 表示活塞桿處于縮回行程。
則單桿EHA 系統的流量死區可以表示為圖2所示。
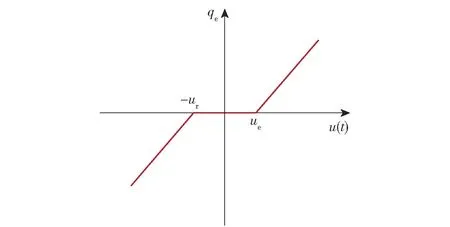
圖2 EHA 系統流量死區示意圖Fig.2 Schematic diagram of flow rate dead-zone of EHA system
3 動態逆補償方法
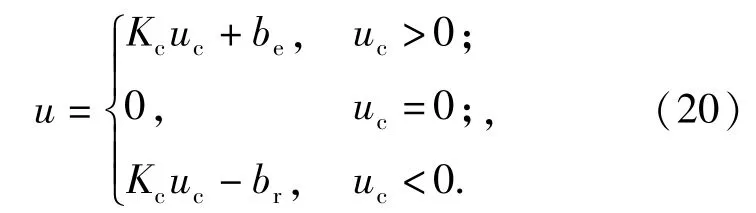
根據(16)式、(17)式和(18)式,圖2 所示的EHA 流量死區模型可表示為
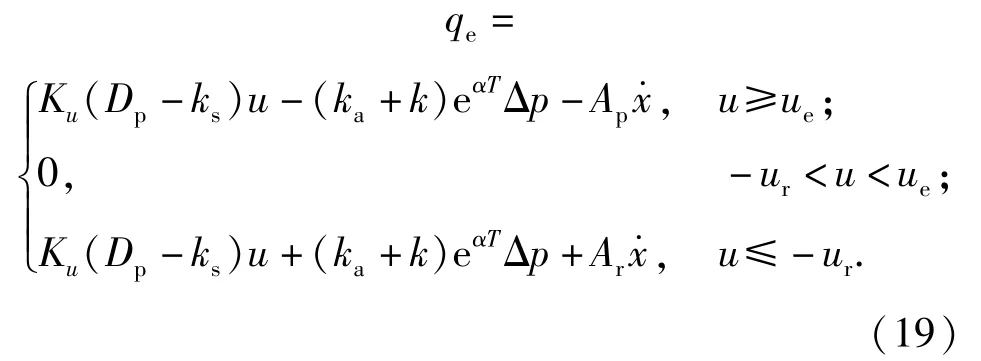
基于(19)式所示的死區模型,建立(20)式所示的死區逆模型:
式中:uc為控制器輸出量;Kc為輸出量逆補償系數;be和br分別為活塞桿伸出和縮回行程時的偏置補償值。假設經過補償后,EHA 系統的有效輸出流量為

根據(17)式~(21)式,可求得
(20)式可重寫為

定義u0為
則(23)式可以寫為

式中:sign(·)為符號函數。隨著系統溫度的升高,齒輪泵泄漏量也隨之增大,使得補償控制器輸入也隨之增加,從而存在電動機輸入飽和的問題。因此,電動機實際輸入電壓應為

式中:sat(·)函數為飽和函數,定義為sat(u)=min {1,|u|}sign(u);umax為允許的最大控制輸入。基于以上推導的EHA 流量死區動態逆模型,建立了圖3 所示動態逆補償方法(DICM)的框圖模型。圖3 中,m為活塞及負載折算到活塞上的總質量,Bp為活塞及負載的黏性阻尼系數。從上述推導及圖3 中可以看出,本文所提流量死區補償模型中的壓力和溫度為實時參數,即實現了變流量死區的動態逆補償。
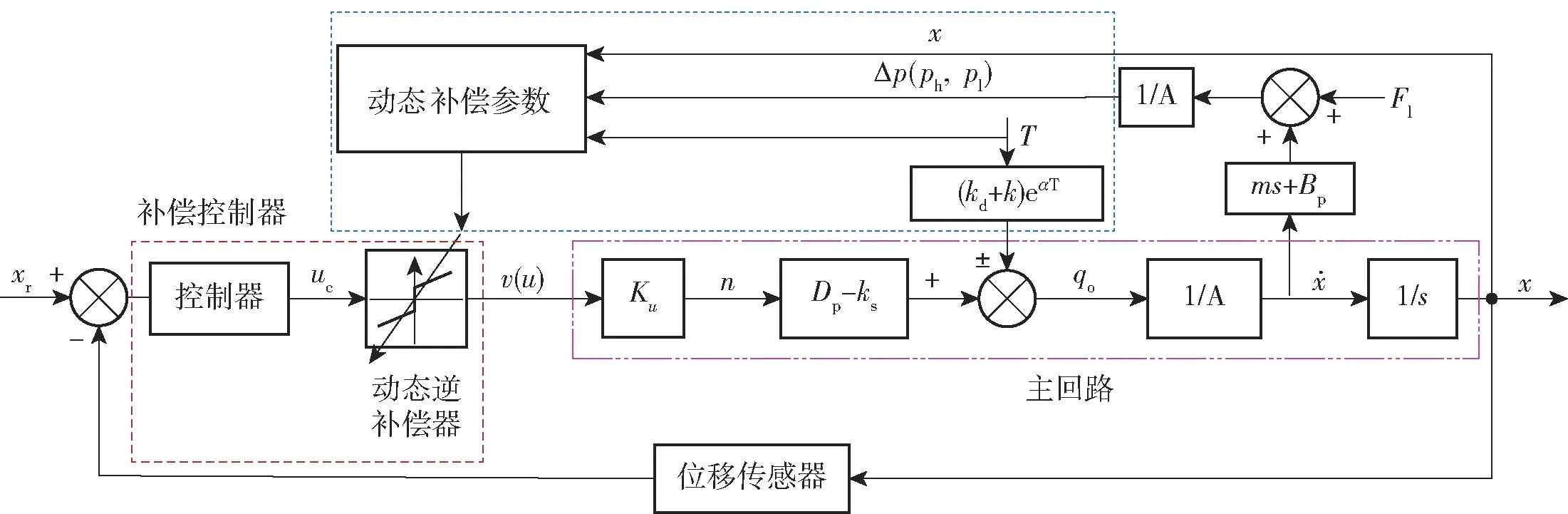
圖3 動態逆死區補償控制方法框圖Fig.3 Block diagram of dynamic inverse compensation method
4 仿真與實驗研究
4.1 仿真研究
為驗證本文所提補償方法的有效性和提高仿真分析的準確性,在MATLAB/Simulink 和AMESim 環境中進行聯合仿真。動態逆死區補償算法及控制系統模型在MATLAB/Simulink 環境中實現,EHA 的液壓系統模型在AMESim 環境中搭建。仿真中,分別對有和無動態逆死區補償時EHA 有效輸出流量進行對比仿真,并分析不同系統溫度、外負載和電機轉速時的補償效果。仿真參數如表1 所示。
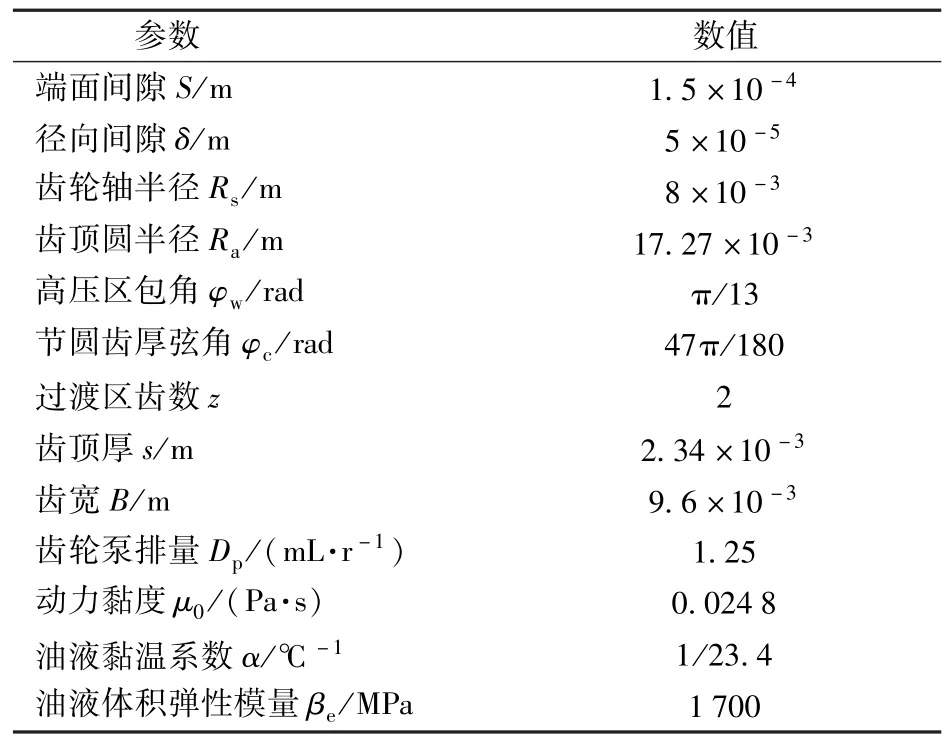
表1 仿真參數Tab.1 Simulation parameters
在仿真研究中,采用兩種形式的溫度:常數溫度和EHA 中隨時間變化的溫度,后一種溫度根據文獻[1]中的數據擬合得到,如圖4 所示。溫度隨時間變化的多項式表達式為
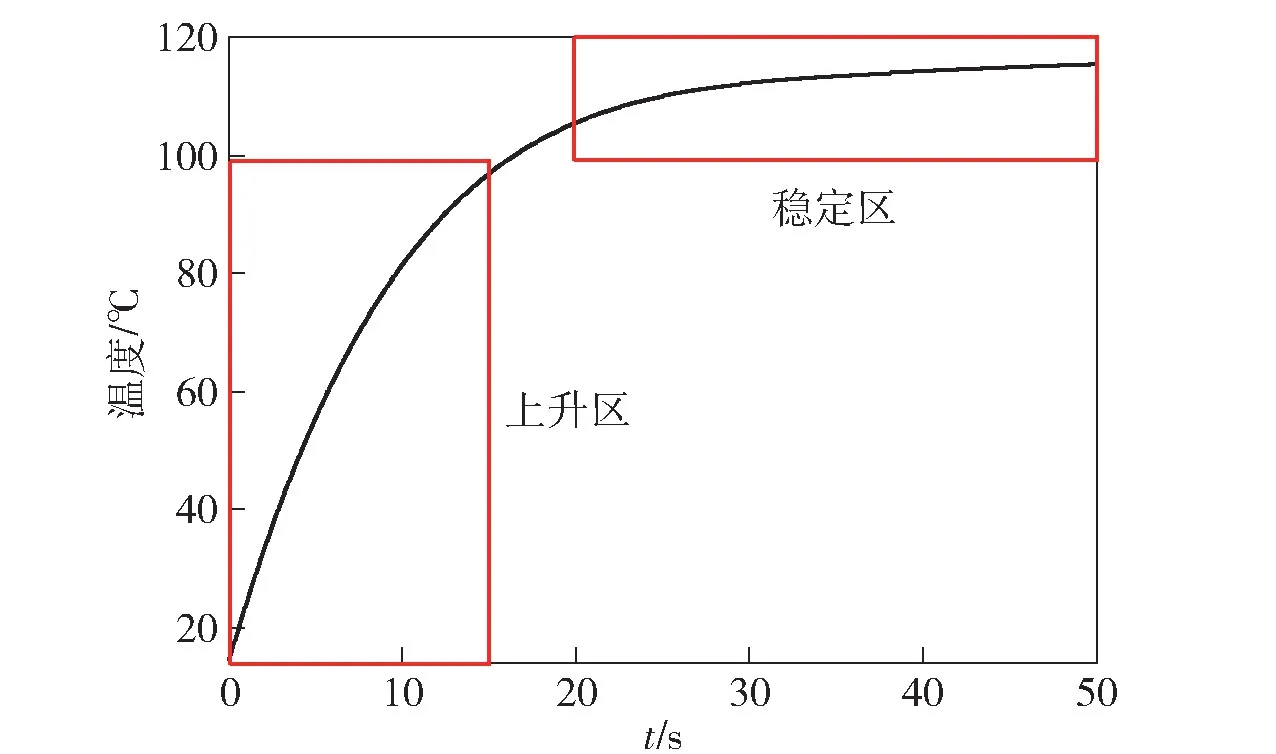
圖4 EHA 系統溫度隨時間變化的曲線[1]Fig.4 EHA system temperature over time[1]

式中:a、b、e、d、e、f為多項式系數,a=3.727 ×10-7,b=-9.17 ×10-5,c=0.008 848,d=-0.421 9,e=10.13,f=14.39。
4.1.1 無動態逆死區補償
當系統中無動態逆補償、溫度以(20 +20j) ℃(j=1,2,3,4,5,6)增大時,通過仿真實驗得到齒輪泵輸出流量死區隨轉速變化的曲線,如圖5 所示。從圖5 中可以看出:齒輪泵輸出流量死區隨溫度增大逐漸增大:當溫度T小于60 ℃時,流量死區隨溫度增大而增大的幅度較小;當溫度T大于80 ℃后,流量死區隨溫度增大而明顯增大,在溫度T=120 ℃時,流量死區高達18.5 r/s。由此可見,溫度對齒輪泵流量死區有著很大的影響。
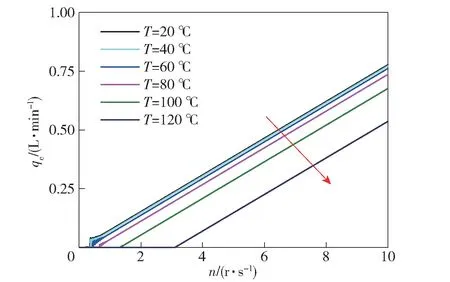
圖5 不同溫度下EHA 有效流量死區曲線Fig.5 Effective flow rate dead-zone curves of EHA at different temperatures
當溫度按圖2 所示曲線變化且n=20 r/s 時,齒輪泵端面間隙泄漏流量qa和徑向間隙泄漏流量qr隨時間變化曲線如圖6 所示,有效輸出流量qe變化曲線如圖7 所示。從圖6 中可以看出,qa和qr均隨著溫度增大而增大,qa明顯大于qr。從圖7 中可以看出:在溫度快速上升區,齒輪泵有效輸出流量qo大幅度減小;在高溫逐漸穩定區,qo減小的速度逐漸緩慢,并逐漸穩定在一恒定值。
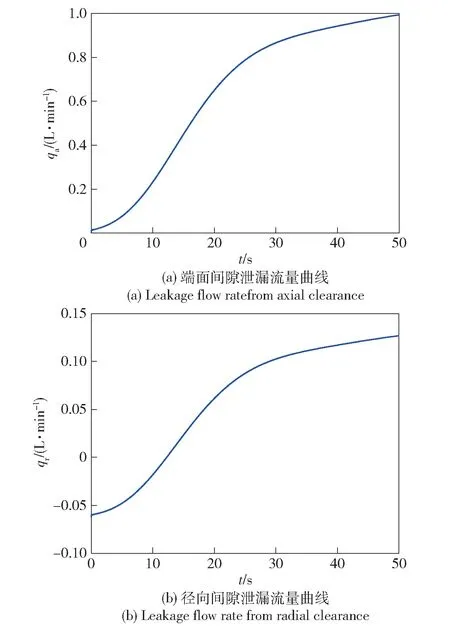
圖6 溫度變化時端面間隙和徑向間隙泄漏流量變化曲線(n=20 r/s)Fig.6 Leakage flow rates from axial and radial clearances as the temperature changes (n=20 r/s)

圖7 轉速n=20 r/s 時齒輪泵有效輸出流量曲線Fig.7 Effective output flow rate curve of gear pump for n=20 r/s
圖8 所示為n=20 r/s 時液壓缸的泄漏流量隨溫度的變化曲線,從中可以看出,液壓缸的泄漏流量隨溫度變化的趨勢與qa相同,但遠小于齒輪泵的泄漏量,表明EHA 的流量死區主要由齒輪泵泄漏流量造成。圖9 所示為n=20 r/s 時EHA 的有效輸出流量曲線。從圖9 中可以看出,在電動機轉速較高時,EHA 的有效輸出流量對系統油溫較為敏感,當油溫高于80 ℃后,qe減小的速度明顯增大。
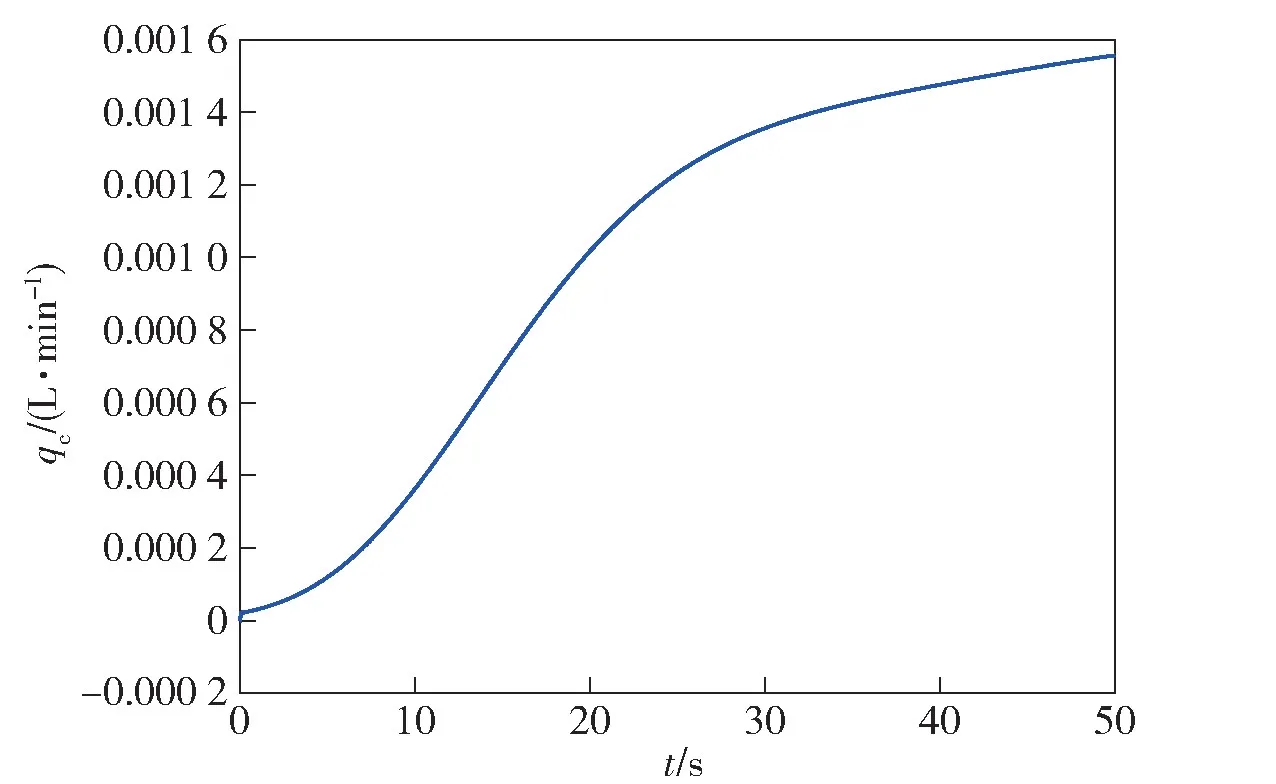
圖8 n=20 r/s 時液壓缸的泄漏流量曲線Fig.8 Leakage flow rate curve of hydraulic cylinder for n=20 r/s

圖9 n=20 r/s 時EHA 的有效輸出流量曲線Fig.9 Effective output flow rate curve of EHA for n=20 r/s
4.1.2 增加動態逆死區補償
在系統中增加(8)式和圖3 所示的動態逆補償器后,得到當n=3 r/s、外負載100 N 時齒輪泵的流量補償結果,如圖10 和圖11 所示。從圖10 中可以看出,DICM 對齒輪泵端面間隙泄漏流量的影響很小,但對徑向間隙泄漏流量的影響較大,這主要是由于qr不僅與溫度相關,還與轉速有關,增加DICM后,qr的有關轉速的部分被抵消了,因此不加DICM與加入DICM 的結果相差明顯。圖11 所示為齒輪泵的有效輸出流量補償效果。從圖11 中可以看出:無DICM 時,在溫度達到80 ℃時齒輪泵的有效輸出流量qe開時急劇減小,在區域A 內qe減小的速度最大,可見小排量齒輪泵有效輸出流量對系統油溫很敏感;當增加DICM 后,qe與期望補償結果很相近,最大偏差為0.000 09 L/min,這是由于在建立DICM模型的過程中對一些量進行了忽略所導致的。
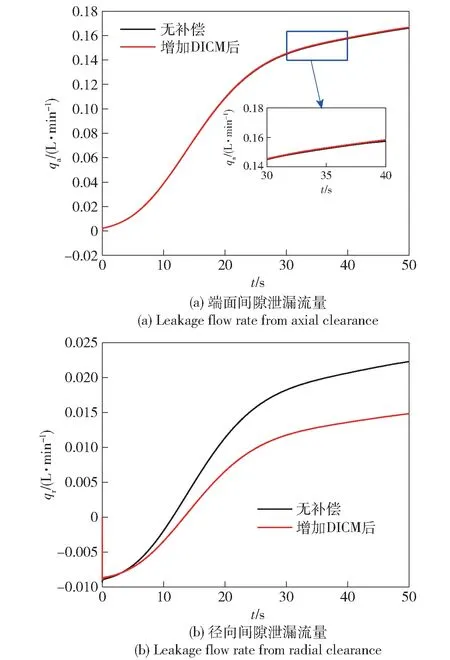
圖10 齒輪泵端面和徑向間隙泄漏流量的補償結果對比Fig.10 Compensation results of leakage flow rates from axial clearance and radial clearance of gear
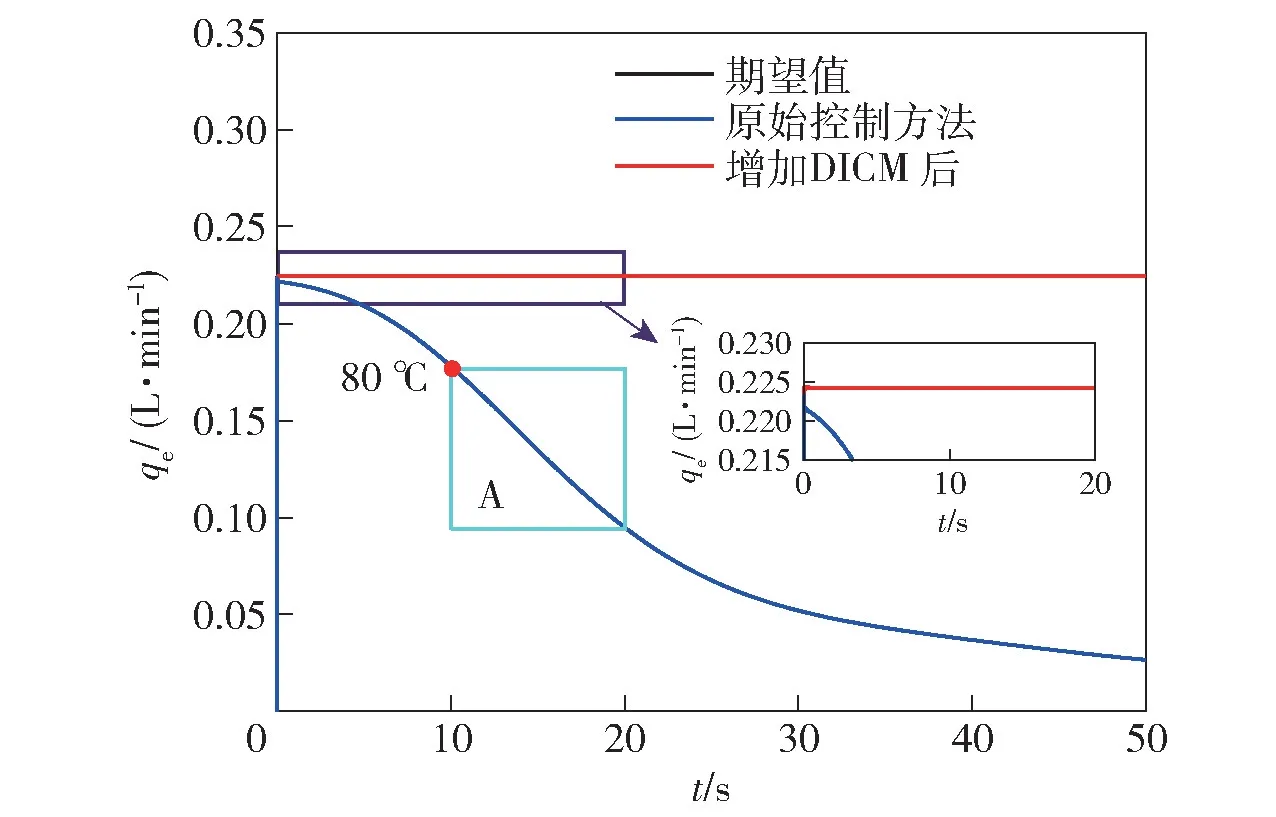
圖11 齒輪泵的有效輸出流量補償效果Fig.11 Compensation effect of effective output flow of gear pump
圖12 和圖13 所示分別為轉速n=3 r/s、負載為100 N 和不同負載時EHA 的流量死區補償結果對比。從圖12 中可以看出,增加DICM 后,EHA 的流量死區得到較好地補償,補償后的有效輸出流量qe與期望值之間的最大偏差為0.002 1 L/min。從圖13 中可以看出,隨著外負載的增大,DICM 的補償效果逐漸減弱,且有效輸出流量qe的脈動愈益嚴重,這是由于外負載決定系統負載壓力,而動態逆補償方法的輸出量隨系統壓力和系統溫度的變化而變化,當外負載增大時使得控制信號出現大幅不穩定,最終導致輸出流量的脈動。因此,DICM 更適合用于輕載時的流量死區補償。
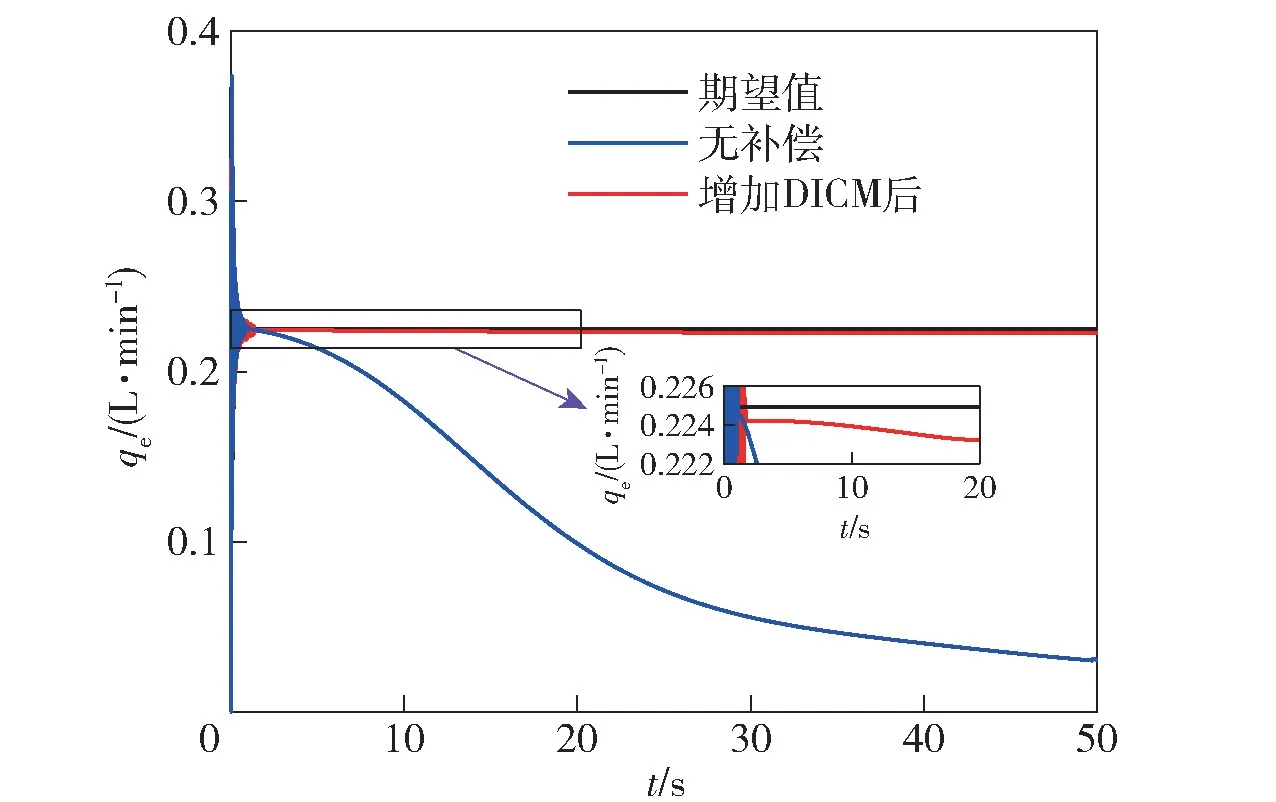
圖12 EHA 的有效輸出流量補償效果Fig.12 Compensation effect of effective output flow of EHA
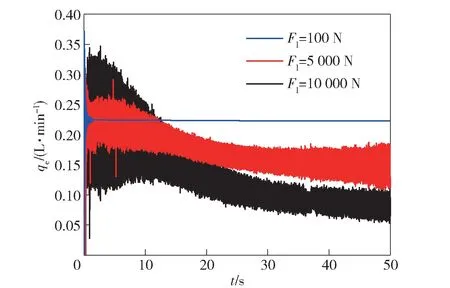
圖13 不同負載下EHA 的流量死區補償結果比較Fig.13 Comparison of flow rate dead-zone compensation results of EHA under different loads
圖14 和圖15 所示分別為相同負載不同轉速和不同轉速不同負載時EHA 的流量死區補償結果比對。從圖14 中可以看出,當外負載為100 N時,不同轉速時的補償效果均較好。對比圖15 中的4 幅圖可發現:低轉速下,當外負載增大時,補償后EHA 的流量出現脈動,但總體補償效果可接受;高轉速下,負載增大時,初始階段的補償效果較好,但補償后的流量出現了脈動的現象,發生脈動的時間節點隨著轉速增大而向前移動,且脈動的幅值隨轉速增大而增大。這是由于轉速的提高間接增大了齒輪泵齒腔壓力梯度,使得齒輪泵徑向間隙泄漏流量增大,最終造成系統有效輸出流量劇烈波動[25]。
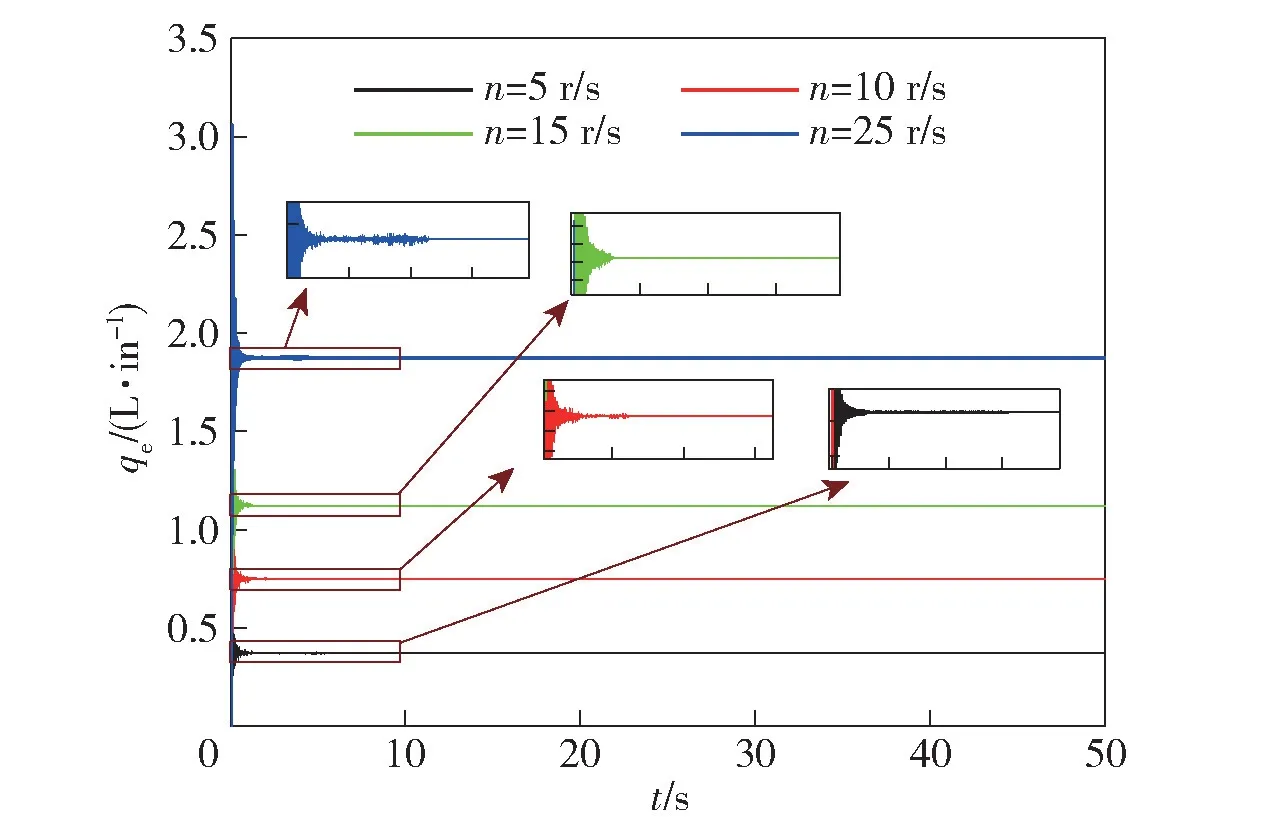
圖14 不同轉速時EHA 的流量死區補償結果比較Fig.14 Comparison of flow rate dead-zone compensation results of EHA at different speeds
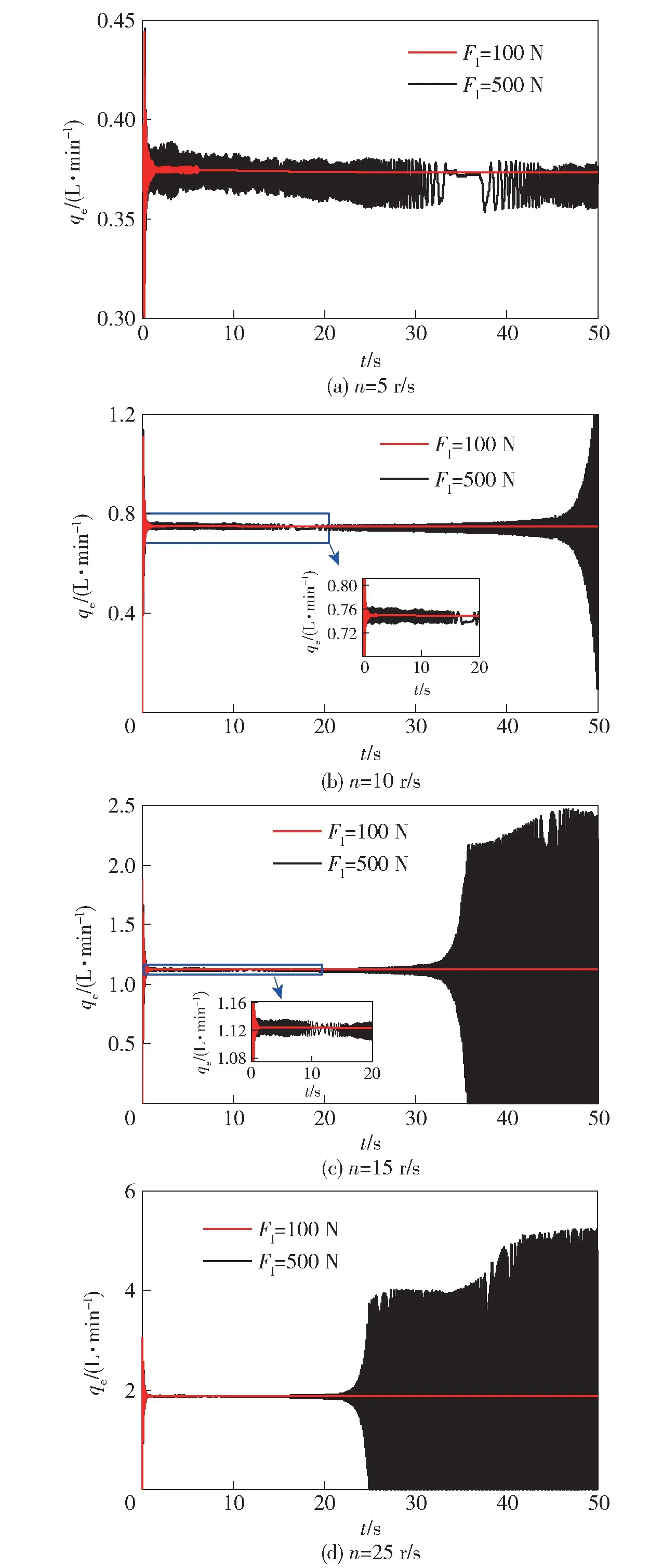
圖15 不同轉速和負載下EHA 的流量死區補償結果比較Fig.15 Comparison of flow dead-zone compensation results of EHA at different speeds and loads
對比圖15 與圖13 可以看出,在低速時,DICM可適用的外負載范圍更大。綜合以上分析可知:本文所提DICM 更適用于EHA 低速時的流量死區補償,負載較小時,補償效果更佳;在高速條件下,DICM 對外負載變化敏感,且不宜用于高速大負載條件。
4.2 實驗驗證
為驗證本文所提出的動態逆補償方法的可行性和有效性,在單出桿EHA 實驗平臺上進行實驗驗證。實驗平臺包括測試臺和EHA 系統兩部分,如圖16 所示。EHA 系統主要由伺服電機(中國匯川ISMH1 系列)、液壓油箱、液壓泵(浸在液壓油箱中)、單出桿液壓缸、可變彈簧負載、位移傳感器、壓力傳感器和溫度傳感器等組成。
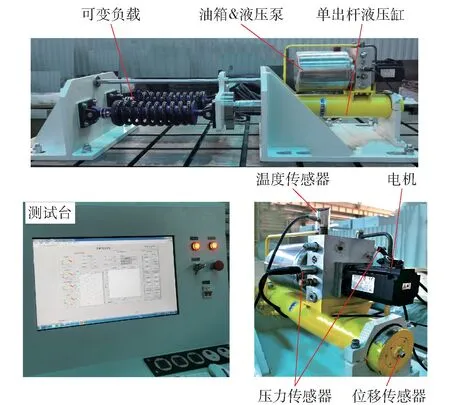
圖16 單出桿EHA 系統實驗平臺Fig.16 Experimental platform for single EHA system
測試臺的計算機控制系統由工控機和研華PCI數據卡組成。模擬量輸入卡為PCI1713,用來采集活塞桿位移信號、液壓缸兩腔壓力信號和系統油溫信號;模擬量輸出卡為PCI1723,用來輸出伺服電機驅動器的控制電壓。
在圖16 所示實驗平臺中無法直接測得EHA 的有效輸出流量,因此通過電機轉速和活塞桿輸出位移間接分析EHA 系統的輸出流量死區補償效果。眾所周知,在沒有強制散熱和加熱設備的情況下,大多數系統的溫度為不可直接控制量。因此,出于延長實驗平臺使用壽命的考慮,本文分別在液壓油溫為23.5 ℃、35.2 ℃和41.3 ℃時實驗驗證本文所提DICM 的有效性。實驗中,實時控制程序由NI Labview 軟件編寫,液壓缸的兩腔壓力值和系統溫度為實時測量參數,在開環下分別測得有無動態逆死區補償時電機轉速和EHA 的位移輸出。實驗結果如圖17、圖18 和圖19 所示。
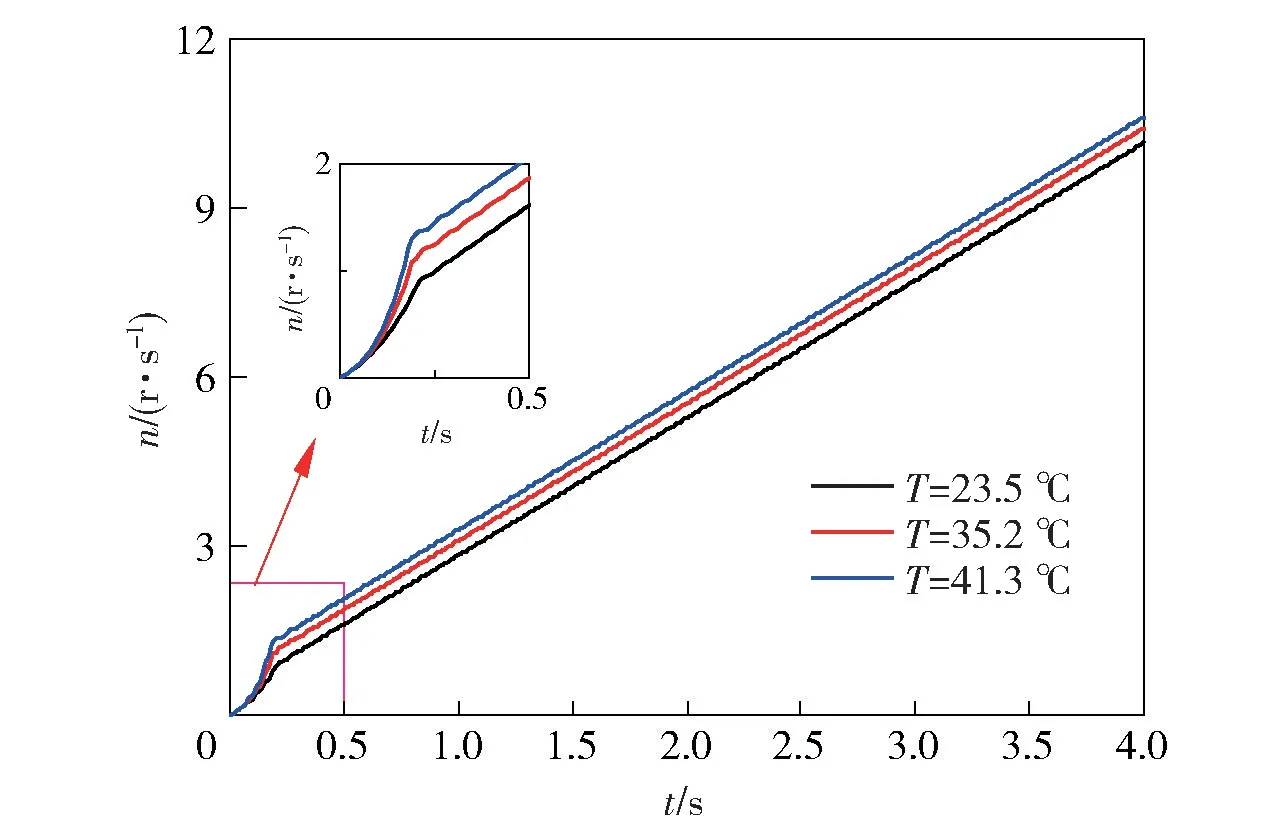
圖17 不同溫度下電機轉速補償結果Fig.17 Compensation results of motor speed at different temperatures
圖17 所示為不同溫度下經過動態逆補償后的電機轉速曲線。從圖17 中可以看出,隨著溫度的升高,電機轉速能夠根據油溫的變化做出相應的補償,補償量隨溫度升高逐漸增大。圖18 所示為不同油溫下,無死區動態逆補償和增加死區動態逆補償時活塞桿的輸出位移曲線。從圖18 中可以看出:增加流量死區動態逆補償后,活塞桿輸出位移的死區明顯較無死區動態逆補償時小;隨著溫度的升高,EHA的活塞桿輸出位移死區A、B、C 依次增大,與仿真結果相吻合。EHA 系統的流量死區是造成活塞桿輸出位移死區的主要因素,并非唯一因素,故增加流量死區動態逆補償方法后,一定程度上補償了由于系統溫度和壓力變化導致的變流量死區,但無法完全消除輸出位移的死區。
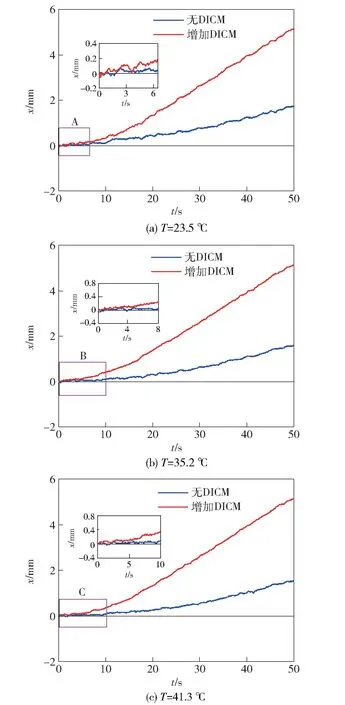
圖18 不同溫度下有/無DICM 時活塞桿位移曲線Fig.18 Displacement curves of piston rod with and without DICM at different temperatures
圖19 所示為不同溫度下經過死區動態逆補償后的活塞桿輸出位移比較。從圖19 中可以看出,本文所提動態逆補償方法在不同溫度下的補償結果基本一致,表明當系統液壓油溫在合理的范圍內時,本文所提補償方法可以有效地補償變流量死區,減小活塞桿的輸出位移死區,使得EHA 系統的控制精度得以提高。
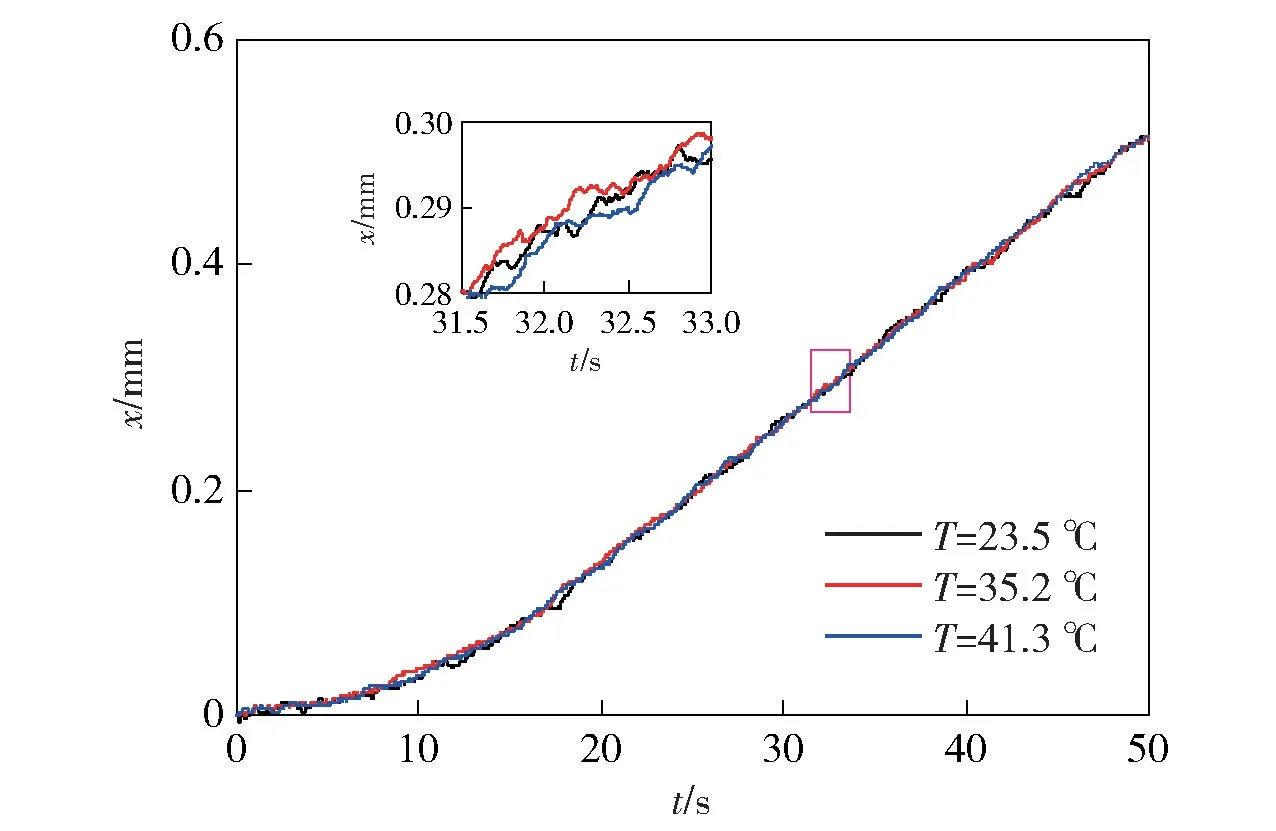
圖19 不同溫度下活塞位移補償結果比較Fig.19 Compensation results of piston rod displacement at different temperatures
5 結論
本文在考慮油液黏溫特性時建立了EHA 系統流量死區數學模型,分析了考慮液壓油液黏溫特性的EHA 流量死區變化規律,提出了一種基于系統模型信息的流量死區動態逆補償控制方法。得到以下主要結論:
1)EHA 有效輸出流量死區隨溫度升高而增大;在油溫低于60 ℃時,溫度對EHA 的流量死區影響較小;當油溫高于80 ℃后,流量死區大幅增大。
2)本文所提出的動態死區逆補償方法能夠較好地補償EHA 的流量死區。仿真結果表明,補償結果與期望補償值之間的偏差可控制在0.002 1 L/min以內;實驗結果表明,本文所提方法在系統溫度變化時使得EHA 的位移死區減小,驗證了該補償方法的可行性和有效性。
3)基于系統模型信息進行死區補償方法的設計思路有利于減小控制器的負荷,同時可提高控制精度,這種死區補償設計思路適用于其他控制系統。
本文提出的動態逆補償方法適用于合理寬溫域內輕載條件下的EHA 流量死區補償,以提高EHA的控制精度。在未來的工作中,可對該方法做進一步研究,使其能夠用于高速大負載條件。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
