簡易升降機用鋼絲繩缺陷在線監測系統
2022-05-26 08:42:56趙章焰
起重運輸機械 2022年9期
趙章焰 程 茁
武漢理工大學物流工程學院 武漢 430063
0 引言
漏磁檢測法作為非接觸式無損檢測的重要方法,已經被廣泛地應用到了各行各業中[1],鋼絲繩的漏磁無損檢測技術在鋼絲繩的檢測領域中相較于圖像檢測[2]、激光雷達[3]、超聲波檢測[4]等方法有著更高的可靠性和更廣泛的認可程度。關于磁激勵方式,早期漏磁檢測用的直流或交變激勵的磁化方法[5],但由于體積和質量等原因已經被淘汰,當今永磁鐵磁化方法被較多使用[6]。關于信號獲取方法,感應線圈的輸出受檢測速度的影響[7],不利于后續信號的處理;磁通門傳感器靈敏度高但需要采用交流激勵,使用不方便[8]且使用場景有限;霍爾元件作為當前使用最為廣泛的磁敏原件,其輸出的信號理論上不受鋼絲繩運動速度的影響[9],且可保證探頭的整體體積小、無溫度漂移、無零點漂移、無需開機校準。
國內對鋼絲繩無損檢測的研究大約始于1960年。20世紀80年代楊叔子團隊基于漏磁通法成功研制了一臺針對鋼絲繩斷絲故障的定性檢測設備,而后又研制出MTC-94鋼絲繩局部斷絲的定量檢測系統;20世紀90年代,采用磁通門傳感法和超聲波發射法等研究都取得一定的成果,被應用在各自特殊的場景里[10,11]。
由于需要在簡易升降機正常工作時對其鋼絲繩進行實時監測,如發現鋼絲繩有損傷需即時判別且將結果傳輸至CPU1215進行匯總處理,進而發出蜂鳴聲或強閃光等警告,必要時可控制簡易升降機的運行,避免其帶故障作業。傳統的停機檢查不可行,不實時且影響簡易升降機正常工作;將原始信號長距離傳輸至上位機處理的方法則因為線路較長導致模擬信號衰減且混入噪聲信號,不利于后續信號的處理。因此,設計一套可以本地處理,只傳輸判別結果的簡易升降機用鋼絲繩缺陷在線監測系統非常有必要。
1 系統方案
基于上述背景及需求,設計了一套基于ARM開發的鋼絲繩缺陷在線監測系統,主要包括鋼絲繩漏磁檢測探頭、AD623放大電路、基于ARM的信號采集處理下位機3部分。
該系統工作的流程為:鋼絲繩漏磁檢測探頭獲取鋼絲繩狀態的模擬量信號,傳輸給AD623放大電路進行約600倍的濾波放大,放大后的模擬信號傳輸給ARM下位機進行模數轉換、數字信號大小判別和開關量輸出3個過程,其中數字信號大小判別的邏輯需提前通過USB to RS485接口寫入ARM下位機,最終將開關量信號送至CPU1215模塊進行匯總處理,作為簡易升降機狀態監測的重要信號組成。總體工作流程如圖1所示。
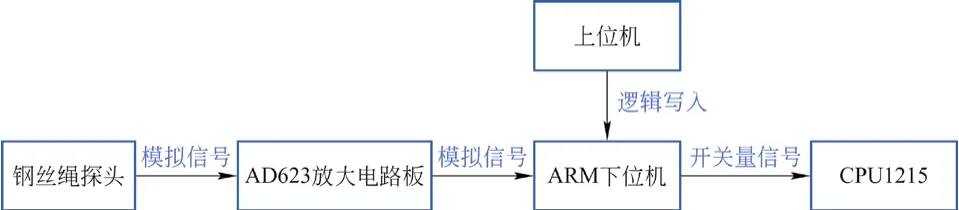
圖1 總體工作流程
在線監測系統方案實物接線如圖2所示。其中,在布置現場實際線路時,AD623放大電路板和ARM下位機的供電可共用一個12 V輸出的電源,以減少隨行線纜的布置難度。
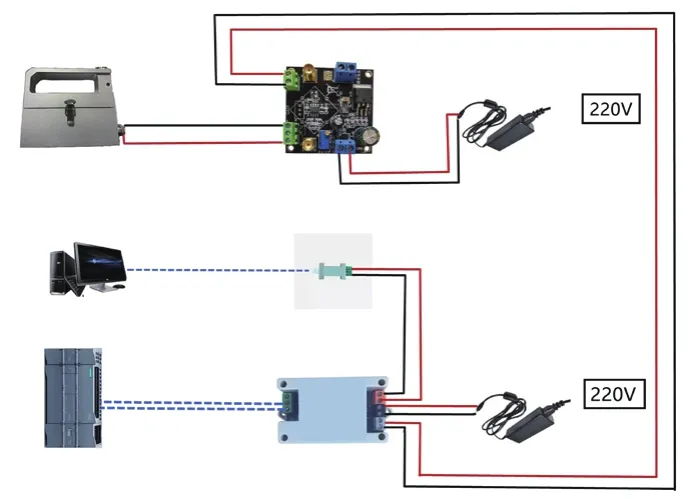
圖2 方案實物接線
2 鋼絲繩漏磁檢測探頭設計
漏磁檢測的原理如圖3所示,永磁磁化器周圍的閉合磁場將鋼絲繩磁化,若鋼絲繩存在磨損或者斷絲等缺陷將產生漏磁場,位于探頭中間的磁敏器件將捕獲這一漏磁場信息,將其轉換為電壓信號,最后對電壓信號處理和判別,結果即可作為鋼絲繩是否有缺陷存在的檢測評判依據。經典的鋼絲繩永磁磁化漏磁探頭是采用的磁軛式結構[12],由幾組磁軛組件固結而成,且組件相對獨立,并通過銜鐵和磁敏元件組成一個整體,但這種結構需要采用大體積大質量的永磁體,不適合安裝在簡易升降機15 mm鋼絲繩的吊鉤上。因此,本監測系統采用小體積小質量的穿過式永磁磁化器探頭,銜鐵材料選用導磁性極強的坡莫合金,磁敏元件選用無需外加激勵的霍爾元件。最終設計制造得到的鋼絲繩漏磁檢測探頭如圖4所示,探頭安裝在鋼絲繩吊鉤上的方式如圖5所示。
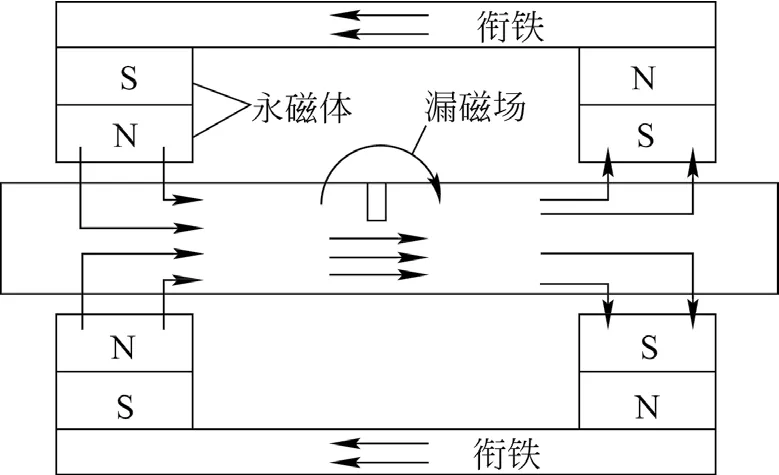
圖3 永磁激勵漏磁檢測原理圖
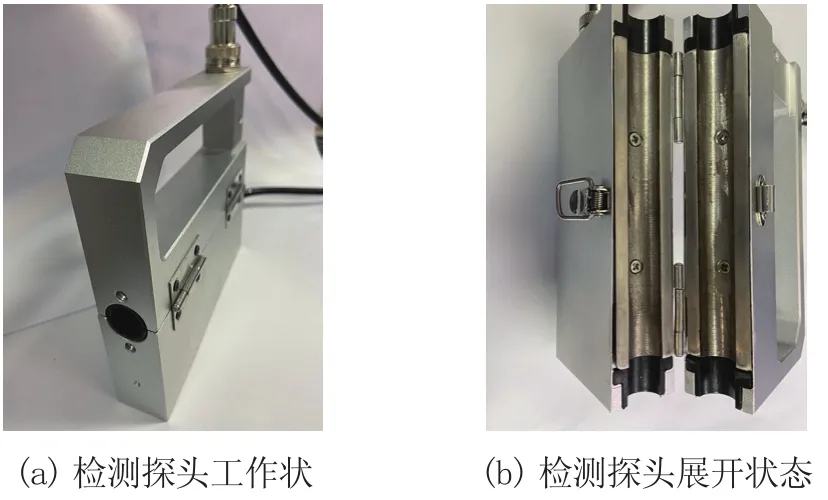
圖4 鋼絲繩探頭實物圖

圖5 探頭安裝方式
3 放大電路的設計
由于漏磁檢測探頭輸出的電壓信號為毫伏級別,而后續的ARM下位機的模擬量采集范圍為0~10 V,采集的分辨率為0.01 V,故需要設計一個放大倍數為數百倍的放大電路板。利用Multisim電路仿真軟件,確定一級放大倍數為20,二級放大倍數為30,總計放大20×30=600倍,此時放大后的信號信噪比高。放大板的原理如圖6所示。
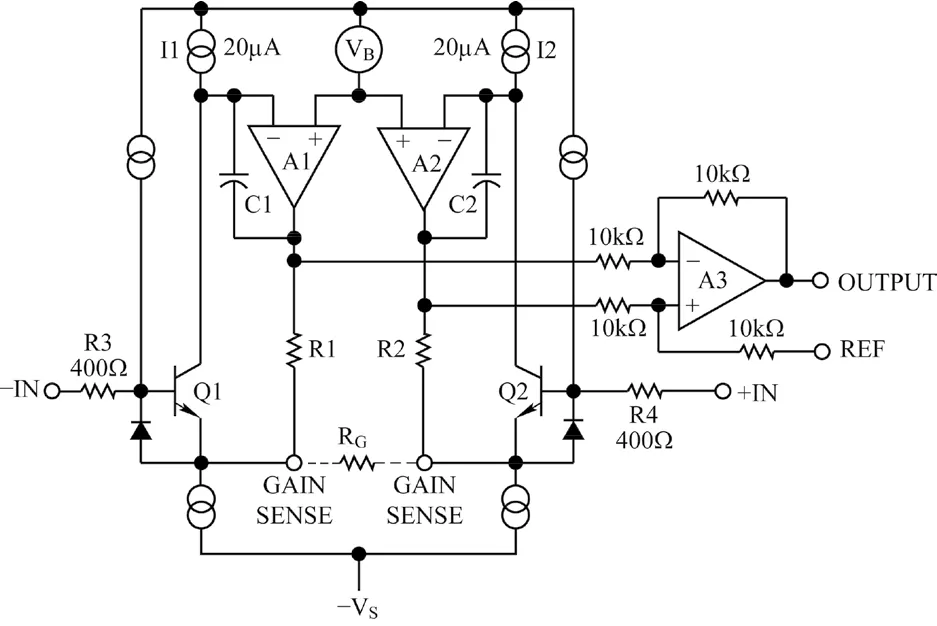
圖6 放大板原理
該模塊基于經典的三運放進行改進設計,具有低功耗、低噪聲干擾和低輸入偏置電流等特性,且可實現軌至軌的運放,其中增益電阻R1和R2的值設定為24.7 kΩ的絕對值,采用可變電阻即可實現對微弱電壓的精確增益,當G=100時,精度接近0.15%。增益公式為

4 數據處理下位機設計
與傳統的將數字信號送至上位機進行判別的方式不同,在此下位機中不僅要進行AD轉換,還要進行數據大小的判別,故對核心微處理器的選型非常關鍵,其需具有響應速度快,處理精度高等特點。傳統的51 Core單片機系列雖然兼容良好應用廣泛,但是一般不具備自編程能力,且地址空間只有64 kb,片上存儲器ROM只有2 ~64 kb,RAM僅為128 byte~1 kb。相比較而言,ARM Core的STM32等系列地址空間有4 Gb,片上存儲器ROM有20 kb~1 Mb,RAM有8 ~256 kb。此外,51 Core單片機絕大部分的架構為馮諾依曼結構,而STM為哈佛結構,數據處理的速度更快,精度更高。
綜合實際需求和成本等多方面考慮,最終選定以ARM為核心進行下位機設計,并選用KSN-1210電源,可將家用220 V電轉換為12 V、1 A的穩定電源,保證下機的精確運行。此外,預留一個RS485通訊接口,可根據預設的信號基準值重新寫入判別邏輯,使下位機具有一定通用性。
通過RS485網絡接口寫入ARM下位機的判別邏輯如圖7所示,漢字界面令編寫更簡單。以圖7中的判別邏輯為例,將放大后的信號基準值定為500,由于模塊的模擬量采集分辨率為0.01 V,所以代表 5 V,當信號偏移至800以上或200以下時,即偏移值大于30%會閉合第一路輸出繼電器;當在(200,800)區間時,第一路保持原來狀態不變。除此之外,預留了備用的第二路輸出繼電器,可用作信號存儲輸出口等。
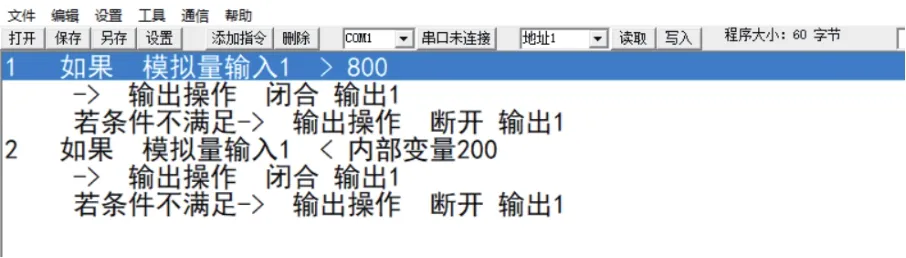
圖7 判別邏輯程序
5 試驗及結果
為了驗證該監測系統整體性能,搭建了如圖8所示的實驗臺,由于鋼絲繩柔性不佳,在實驗室難以使用電葫蘆帶動其運動,故采用鋼絲繩繃直并保持靜止,手推探頭沿著鋼絲繩前進,來模擬這二者的運動關系,并不用考慮二者的相對運動速度,因磁敏霍爾元件的輸出不受運速度的影響。以簡易升降機用的φ15 mm 6股交互捻鋼絲繩為實驗對象,在此鋼絲繩上人為制造3處缺陷,包括缺陷1表面1根斷絲、缺陷2表面3根斷絲和缺陷3表面4 mm磨損缺口,并將探頭往復推動10次每種類型各檢測20次,最后通過上位機CPU1215讀取第一路繼電器的輸出,檢測結果如圖9示。

圖8 鋼絲繩實驗臺
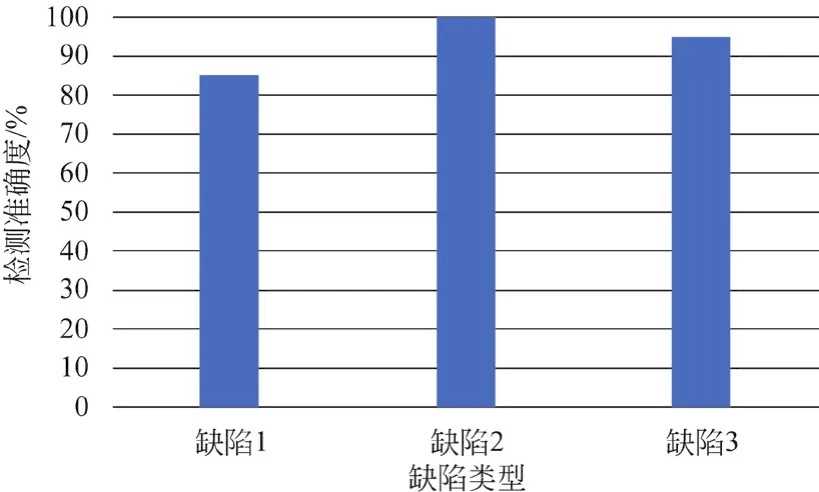
圖9 不同缺陷類型的檢測準確度
由圖9可知,鋼絲繩表面1根斷絲的檢測準確度為85%、表面3根斷絲檢測的準確度為100%、表面4 mm磨損缺口檢測的準確度為95%,綜合檢測準確度高達93.33%。其中斷絲1根的缺陷類型下的檢測準確度相對較低,分析可能是磁敏原件距缺陷位置在圓周上超過了180°,導致霍爾磁敏元件的輸出電壓值沒有到達提前所設置的閾值,沒有引起第一路繼電器的通斷變化。
6 結論
1)通過分析簡易升降機鋼絲繩在線監測的需求,確定了鋼絲繩缺陷監測探頭需安裝在貨箱吊鉤上隨貨箱一起運行,基于這一特點,采用弱磁永磁體作為勵磁元件,以減少隨行線纜的數量和探頭的質量;此外,在實際工作時,鋼絲繩相對于探頭的運動速度并非勻速,有加減速的過程,故采用霍爾磁敏元件作為信號轉換輸出元件,最后完成了鋼絲繩探頭的樣品制作。
2)基于經典的三運放大電路進行改進設計,設計了一款可調倍數的放大電路板,他有著低功耗、低噪聲等特性;并確定了2級放大的相應倍數,為后續輸出處理做準備。
3)基于ARM進行開發,設計了一款集AD轉換、數值判別和開關量輸出為一體的下位機。其中,模擬量的采集精度高達0.01 V,有助于提高檢測精確度;數值判別的基準值和上下閾值都可通過USB to RS485接口寫入,使得模塊具有通用性和適用性;開關量輸出是通過第一路繼電器實現,結果比波形圖輸出更加直接。
4)在實驗室搭建了模擬實驗的平臺,以鋼絲繩不動,探頭沿著鋼絲繩來回移動模擬實際與運動情況,在φ15 mm 6股交互捻鋼絲繩上人為造成3種最為常見的缺陷故障,測得總體檢測準確度為93.3%,滿足投入應用的標準。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
