基于RCMDE與概率神經網絡的滾動軸承故障診斷
2022-05-26 13:01:18黃晉英
制造業自動化 2022年5期
陳 帥,黃晉英
(中北大學 機械工程學院,太原 030051)
0 引言
滾動軸承作為機械設備的重要部件之一,因其復雜的結構和惡劣的工作環境,在長時間運行后可能會出現各種各樣的故障,結果可能導致企業生產效率降低嚴重時甚至出現生命安全問題[1]。所以,對其故障診斷方法進行系統全面的探究具有十分重要的實際意義。如果發生了故障,相關的振動信號往往會具有非平穩以及非線性等方一系列特征。現有的非線性、非平穩性以熵值為特征參數的信號分析方法主要有:近似熵、排列熵、模糊熵、樣本熵等,但上述方法均為基于時間序列的單一尺度分析,分類效果較差[2]。之后又提出了多尺度熵算法,其優點是通過多尺度粗粒化過程使得熵擴展到多個時間尺度上,從多尺度表征故障信號的特征信息,進而解決了單一尺度熵的局限性,減小了偏差[3]。但是當數據序列較長時,會出現運算速度慢、故障信息丟失嚴重等問題,基于此,學者們提出一種精細復合多尺度散布熵(RCMDE)算法[4],該方法能夠明顯改善在粗粒化過程中信息丟失問題。近年來,神經網絡已經獲得了廣泛的應用,它在非線性關系數據的處理領域中尤其顯著的優勢。概率神經網絡(PNN)的主要特點是有良好的并行處理、自學習以及自組織等方面的能力,可以在不同的精度水平之下向各種連續非線性函數進行逼近[5]。在此基礎上,本文以概率神經網絡(也就是PNN)以及精細復合多尺度散布熵(也就是RCMDE)為基礎首次提出了一種新的滾動軸承故障診斷分析方法,在研究的過程中,還和MDE-PNN法展開全面的分析與對比。所得到的結果表明,所提方法既能夠實現軸承故障的有效識別分類,且診斷效果優于MDE-PNN方法,平均分類精度達到了97.65%。
1 精細復合多尺度散布熵理論基礎
1.1 散布熵
散布熵是度量時間序列復雜性的非線性動力分析方法,對于長度為N的時間序列x={x1,x2,…,xN},其計算步驟如下[6]:
1)利用正態分布函數將時間序列x映射到y={yj,j=1,2,…,N},yi∈(0,1),如式(1)所示。

式(1)中,σ和μ分別表示標準差和均值。
2)線性變換將y映射到[1,2,…,c],如式(2)所示。

式(2)中,c是類別個數,int()是取整函數。
3)計算嵌入向量zm,ci:

式(3)中,m是嵌入維數,d是時間延遲。
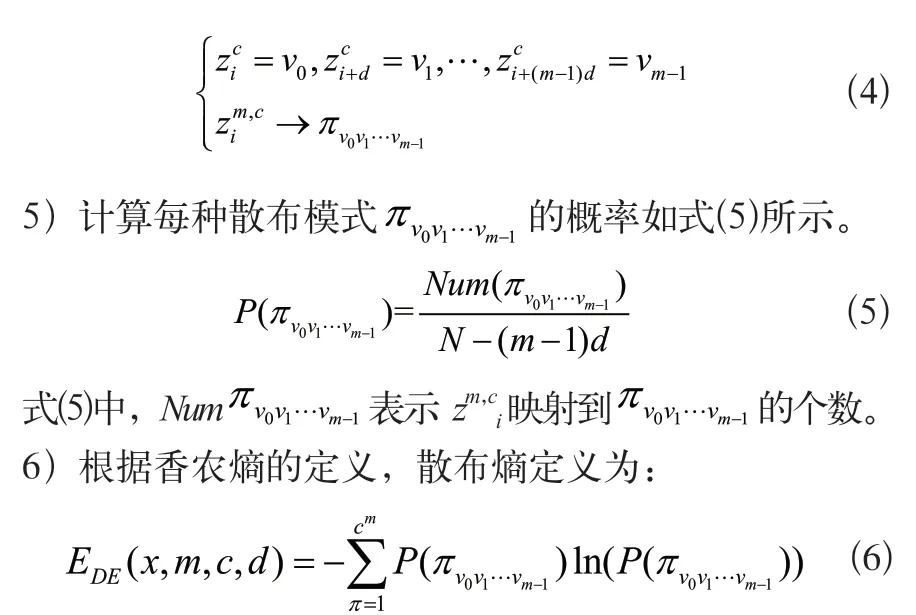
7)計算標準散布熵,公式如式(7)所示。

1.2 精細復合多尺度散布熵
RCMDE計算過程如下[7]:
1)多尺度粗粒化。給定原始數據u,其第k個粗粒化序列的計算如式(8)所示。

式(8)中,τ是尺度因子。
2)對每個尺度τ,RCMDE值定義如式(9)所示。

2 概率神經網絡
它為徑向基網絡當中的重要分支,主要的優點就是分類精度比較高,可以有效地利用簡單的線性模型訓練非線性模型,有效避免了BP神經網絡的局部最小值問題[8]。
PNN模型分為4層結構,第1層是輸入層,第2層是具有N個神經元的隱含層(N是訓練數據的數量),第i類樣本的第j個神經元的輸入與輸出關系由式(10)確定[9]。

式(10)中是平滑因子,d為數據維度。
第3層是求和層,其把上一層中為同類的隱含層神經元的輸出按式(11)平均:
式(11)中,fi為第i類的概率。
第4層是神經元的輸出層,如式(12)所示。

式(12)中,z為輸出層的輸出。
3 實驗驗證
3.1 實驗設置
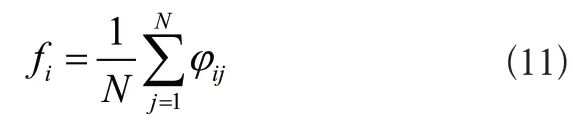
在本研究中將會通過西儲大學數據集來進行全面的分析與驗證。所采用的實驗臺詳見本文的圖1,其中有電子控制器、功率測試分析設備、扭矩傳感器以即電動機等多個重要的組成部分。軸承選用SKF6205-2RS,為了模擬軸承常見的4種狀態,采用電火花加工方式對軸承進行不同程度的單點損傷。選擇采樣頻率12kHz、電機轉速為1797r/min的驅動端軸承數據進行分析,每種狀態選擇80個樣本,共計320個樣本,每個樣本長度為4096,軸承狀態說明見表1。圖2為軸承時域波形圖。
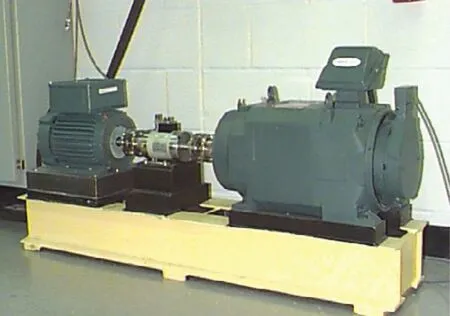
圖1 實驗臺
圖2 軸承4種狀態時域波形圖
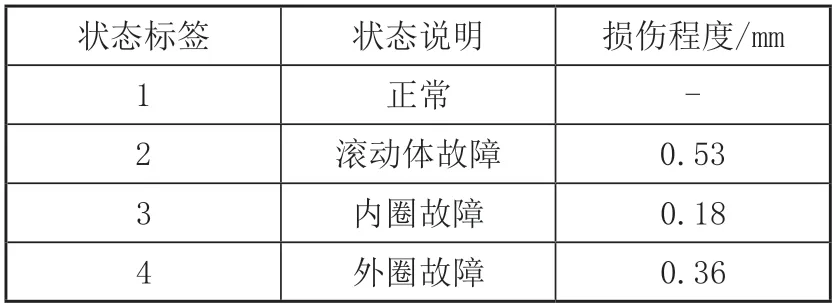
表1 軸承的4種狀態
3.2 實驗結果
計算320個樣本的RCMDE值,設置算法相關參數:最大尺度因子τ=20,嵌入維數m=2,延遲時間d=1。每種狀態不同樣本計算的熵值均值如圖3所示,可知,正常軸承振動信號RCMDE值遠大于3種故障狀態RCMDE值,并且變化趨勢明顯不同。對于排在前面的三個尺度,正常情況下,RCMDE值會隨著尺度逐漸提高而相依地提升,如果是出于故障的狀態中,那么它將會是始終下降的,尤其是由第三個尺度至第十個的過程中,將出現一定程度的波動現象,在此之后將比較的穩定。從整體上來看,RCMDE值與尺度因子成反比,在尺度因子達到11之后逐漸趨于平穩。
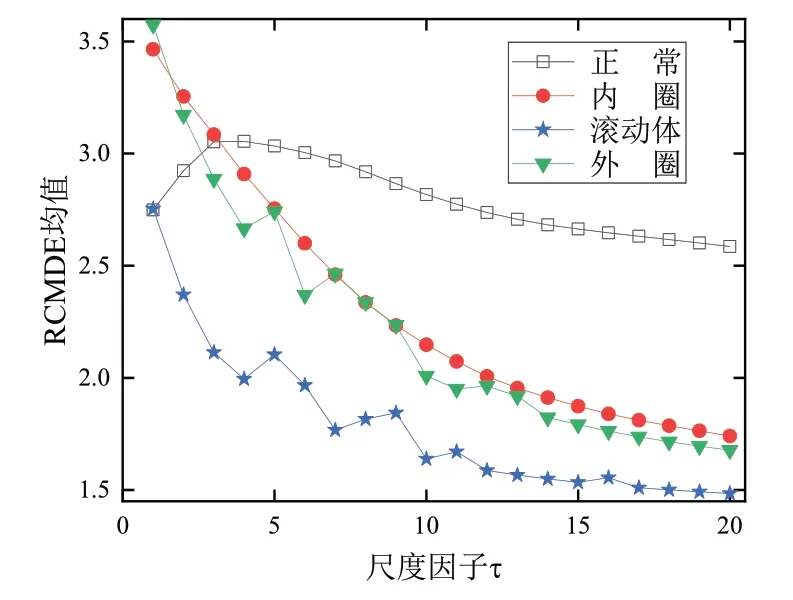
圖3 振動信號RCMDE均值
此外,還與MDE法展開全面的對比分析,以闡述RCMDE法所具有的主要優勢。計算每種狀態信號不同樣本MDE值,所得結果如圖4所示。對比圖3、圖4,可以看出:隨著尺度因子τ的增大,RCMDE值變化較MDE值變化相對平緩,從圖4可知,外圈和內圈故障從第5個尺度因子之后基本重合,不利于下一步分類器的識別分類,所以,選擇RCMDE值作為特征參數進行軸承4種狀態的特征提取較為合理。
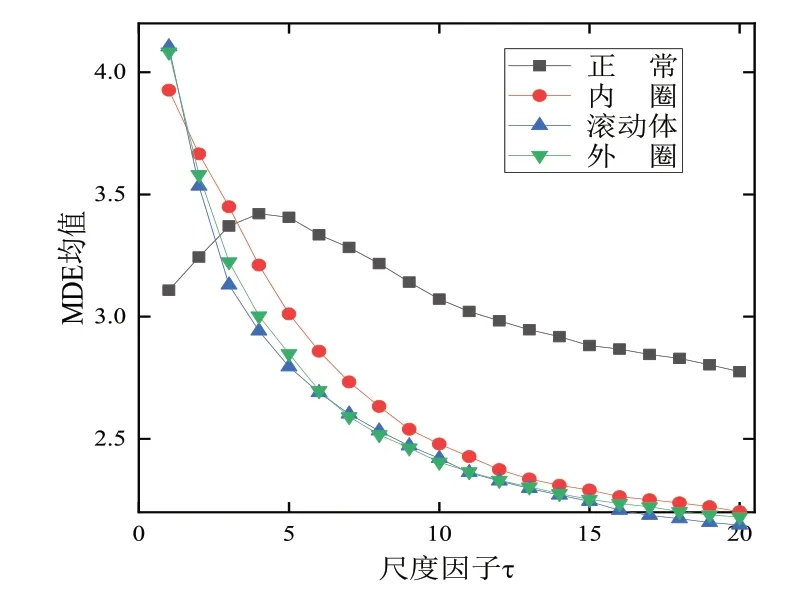
圖4 前20個尺度MDE均值
實驗隨機選取每種狀態的50個樣本作為訓練樣本,30個樣本作為測試樣本,為了減小實驗偶然性,對RCMDEPNN和MDE-PNN兩種模型分別進行10次實驗,結果如圖5所示。根據圖5可知,基于RCMDE-PNN的故障診斷方法分類效果明顯優于比MDE-PNN方法,分類準確率達到97.65%,而MDE-PNN的分類準確率為92.85%,分類準確率提高了4.8%。
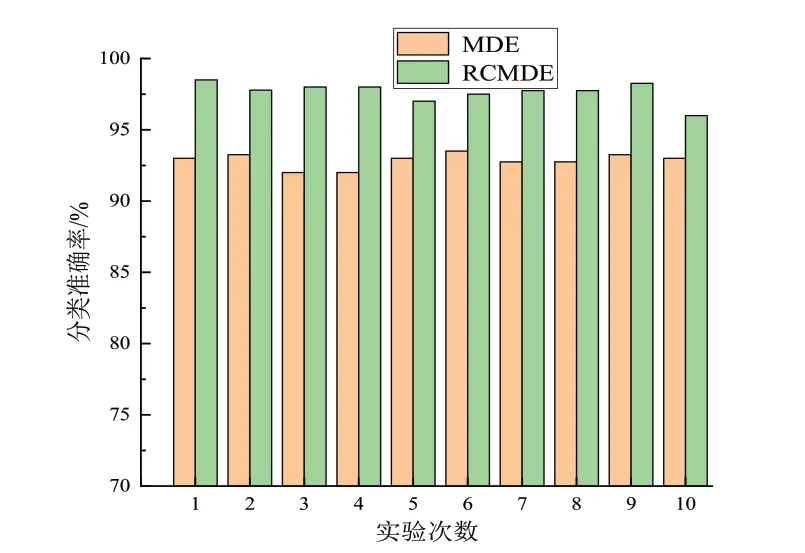
圖5 實驗結果
4 結語
1)引入一種檢驗振動信號復雜性的算法-精細復合多尺度散布熵(RCMDE),與MDE方法相比,RCMDE解決了單一尺度熵的局限性,實現了多尺度表征故障信號的特征信息,有利于下一步的故障識別分類;
2)RCMDE-PNN模型的軸承故障診斷準確率為97.65%,而MDE-PNN模型診斷準確率僅為92.85%,本文所提RCMDE-PNN方法,提升其分類準確率達4.8%,并且對它的優勢與有效性進行了全面的驗證。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
