改進海鷗優(yōu)化算法在光伏系統(tǒng)MPPT中的應用
2022-05-26 04:01:18李大華付文成
電源技術(shù) 2022年5期
關(guān)鍵詞:優(yōu)化
李大華,聶 前,田 禾,付文成,杜 洋
(1.天津理工大學電氣電子工程學院,天津 300384;2.天津市復雜系統(tǒng)控制理論及應用重點實驗室,天津 300384;3.天津市三源電力智能科技有限公司,天津 300409)
近年來,由于傳統(tǒng)的化石能源儲量不斷減少以及造成的環(huán)境問題日益嚴重,太陽能因綠色無污染的特點得到了廣泛的應用[1]。光伏陣列處于均勻光照條件下,光伏輸出功率(P)對光伏電壓(U)的曲線僅包含一個峰值點。這一點可以簡單地使用任何傳統(tǒng)的跟蹤方法來捕捉,如電導增量法和擾動觀察法[2]。然而在實際應用中,光伏陣列會因環(huán)境的影響(樹木、房屋等遮擋)造成每塊光伏板的光照強度不同,導致P-U曲線中出現(xiàn)多個峰值點,其中包括全局最大功率點(global maximum power point,GMPP)以及局部最大功率點。傳統(tǒng)的跟蹤方法易受局部最大功率點的影響而陷入局部最優(yōu),無法捕捉到全局最大功率點,從而導致跟蹤失敗。
為了解決局部陰影情況下傳統(tǒng)最大功率點跟蹤(MPPT)控制方法無法搜索到GMPP 的問題,國內(nèi)外許多學者展開了大量的相關(guān)研究。文獻[3]提出將粒子初始位置分散定位在可能的峰值點電壓處,雖然可以跟蹤成功,但是算法迭代次數(shù)過多導致速度下降明顯;文獻[4]提出自適應細菌覓食優(yōu)化算法跟蹤最大功率點,根據(jù)細菌覓食程度自適應在線調(diào)整移動步長與驅(qū)散概率,具有跟蹤速度快的優(yōu)點,缺點是參數(shù)設置過多,且易發(fā)生過早收斂;文獻[5]利用布谷鳥算法的全局搜索能力與擾動觀察法的局部細致搜索能力相結(jié)合,可以提升跟蹤的速度與精度;文獻[6]提出簡化的蟻群優(yōu)化算法實現(xiàn)最大功率跟蹤,通過不斷迭代使占空比更新,實驗結(jié)果表明其大大提升了追蹤速度。
海鷗優(yōu)化算法(seagull optimization algorithm,SOA)是由Dhiman 和Kumar 在2019 年提出的一種新的基于生物行為啟發(fā)的元啟發(fā)式算法,相對于其他智能優(yōu)化算法,該算法原理簡單,參數(shù)設置簡單,并且在收斂速度方面也具有一定優(yōu)勢,在很多工業(yè)領(lǐng)域都得到了實際的應用[7]。但SOA 和很多優(yōu)化算法一樣,存在易陷入局部收斂的問題,尤其遇到復雜多峰值的問題時。本文在海鷗優(yōu)化算法的基礎上引入混沌序列[8],增加種群位置的多樣性,以此來克服過早收斂的問題,加強算法在全局搜索與跳出局部搜索的能力。傳統(tǒng)的SOA算法搜索過程為線性,而光伏輸出P-U 特性曲線為非線性,為此提出改進海鷗優(yōu)化算法(I-SOA),將非線性搜索控制應用到MPPT 中,來提高算法的速度和精度。
1 光伏電池等效電路及輸出特性
通常將光伏電池的工作狀態(tài)用一個等效電路來進行模擬,如圖1 所示。
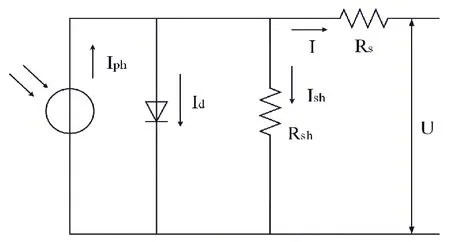
圖1 單個太陽電池等效電路圖
由圖1 可知光伏電池的電氣特性為:
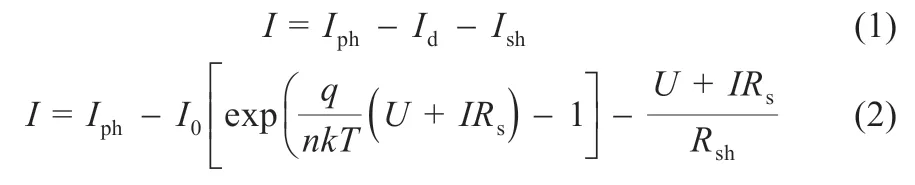
式中:Iph為光伏電池的光生電流;Id為暗電流;I0為二極管的反向飽和電流;Rsh為等效并聯(lián)電阻;Rs為串聯(lián)等效電阻;n為二極管特性因子;k為波爾茲曼常數(shù),1.38×10-23J/K;T為光伏電池溫度;q為電子電荷;I為光伏電池的輸出電流;U為光伏電池的輸出電壓。
由于單體的光伏電池輸出電壓很小,無法滿足日常生活的應用,所以通常將幾個光伏電池通過串并聯(lián)的方式封裝成光伏組件[9]。串聯(lián)要求所有模塊產(chǎn)生相同的電流,在部分陰影條件下,陰影模塊無法產(chǎn)生與非陰影模塊相同的電流;此時,陰影模塊將消耗而不是提供電流,導致光伏組件局部溫度過高,形成熱斑現(xiàn)象。為了防止熱斑現(xiàn)象,旁路二極管通過模塊并聯(lián)使用,以簡單地繞過陰影模塊,這導致在P-U 和IU 曲線上出現(xiàn)多個峰值[10]。
本文在Simulink 平臺上建立了3×1 的光伏陣列仿真模型,如圖2 所示,主要利用該仿真模型對光伏陣列處于局部陰影情況下的輸出特性進行研究分析。其中光伏電池的參數(shù)為:開路電壓均為36.3 V,短路電流均為7.84 A,最大功率均為213.15 W,最大功率點電壓均為29 V,最大功率點電流均為7.35 A。在標準環(huán)境溫度(25 ℃)下設置三種情況,見表1。將光伏陣列置于此情況下進行仿真,得到光伏輸出曲線如圖3 所示。

圖2 光伏陣列拓撲結(jié)構(gòu)
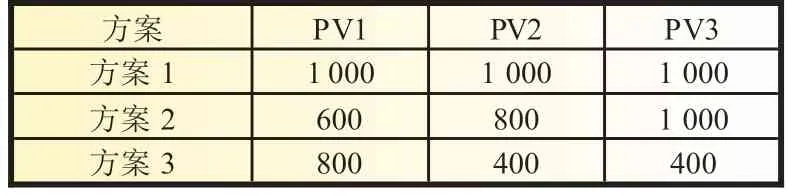
表1 不同環(huán)境下光伏組件所受的光照強度 W/m2
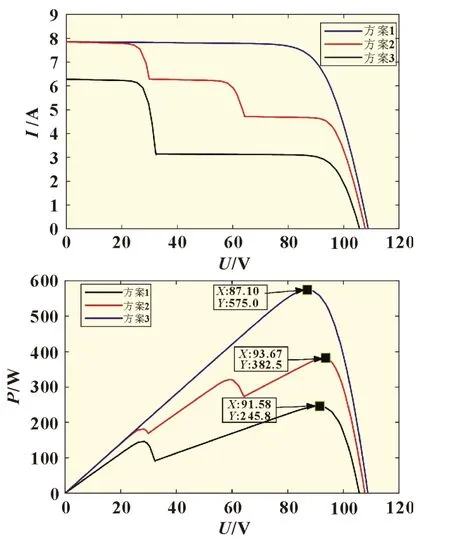
圖3 遮陰下光伏陣列I-U和P-U輸出曲線
由圖3 可知,當光伏陣列處于方案1 時,在光照均勻條件下光伏陣列的輸出功率曲線呈單峰;當光伏陣列處于方案2時,輸出功率曲線有三個峰值;而當光伏陣列處于方案3 時,輸出功率曲線有兩個峰值。由此可得,光伏陣列處于局部陰影的情況下,其P-U 特性曲線具有多個峰值點,為了提高輸出功率,引入一種能快速、準確跟蹤到全局最大功率點的智能算法顯得尤為重要。
2 海鷗優(yōu)化算法簡介
2.1 海鷗優(yōu)化算法
海鷗優(yōu)化算法是一種新的基于生物行為啟發(fā)的元啟發(fā)式算法,其思想源于自然界中海鷗的遷徙和攻擊行為[11]。
2.1.1 遷徙(全局搜索)
算法通過模擬海鷗種群的遷徙來實現(xiàn)全局搜索。此階段海鷗應滿足3 個條件。
(1)避免碰撞:為了避免海鷗之間互相碰撞,算法采用附加變量A計算海鷗的新位置。

式中:Cs(i)為不與其他海鷗發(fā)生碰撞的新位置;Ps(i)為海鷗當前位置;i為當前迭代;A為海鷗在給定搜索空間中移動行為的參數(shù)。

式中:fc可以控制變量A的頻率,將A的值從2 線性下降到0;Maxiteration為迭代總次數(shù)。
(2)最佳位置方向:海鷗之間避免碰撞后,海鷗個體會向最佳位置所在方向移動。

式中:Ms(i)為最佳位置的方向;B為隨機數(shù),作用是平衡全局和局部搜索。

式中:rd為[0,1]范圍內(nèi)的隨機數(shù)。
(3)靠近最佳位置:海鷗移動到不與其他海鷗相撞的位置后,就向著最佳位置的所在方向進行移動,到達新的位置Ds(i)。

2.1.2 攻擊(局部搜索)
海鷗找到獵物后,會不斷改變攻擊的角度和速度,以螺旋運動的方式攻擊目標。x、y和z平面中的運動行為描述如下:

式中:r為每個螺旋的運動半徑;θ為[0,2π]范圍內(nèi)的隨機角度值;u和v為螺旋形狀的相關(guān)常數(shù)。海鷗的攻擊位置由公式(8)~(11)計算得到。

式中:Ps(i)為海鷗的攻擊位置(保存最優(yōu)解決方案并更新其他搜索代理位置)。
2.2 改進海鷗優(yōu)化算法的附加控制因子
海鷗優(yōu)化算法與傳統(tǒng)的智能算法粒子群相比,具有易于實現(xiàn)、收斂速度快、參數(shù)調(diào)整簡單的優(yōu)點。然而,SOA 的全局優(yōu)化搜索過程是線性的,如式(4)所示。這種線性搜索方式意味著不能充分利用SOA 的全局搜索能力。因此,本文提出一個非線性搜索控制公式,如公式(13)所示,可以針對海鷗群探索過程階段,提高算法的速度和精度。

該方法中的A值在遞減過程中呈現(xiàn)出非線性趨勢,可以更好地提高全局搜索能力,每次迭代都能避免海鷗之間的位置沖突,也能更好地平衡探索與開發(fā)。
如圖4 所示,與原SOA 算法相比,在迭代初期,非線性控制因子A前期驟減可增強算法的全局搜索能力及保持種群的多樣性;在迭代后期,A緩慢遞減可增強局部搜索能力。這樣既可以保證在最大功率跟蹤過程中不易陷入局部最優(yōu),又可以縮短整個尋優(yōu)過程的時間并提高尋優(yōu)精度。
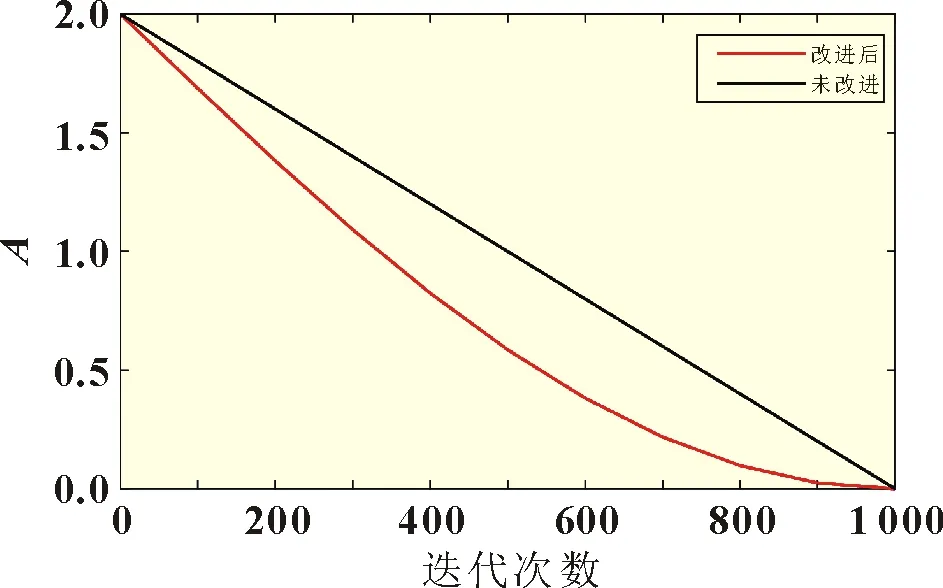
圖4 控制因子A隨迭代次數(shù)的變化趨勢
2.3 混沌優(yōu)化理論
SOA 算法隨機確定海鷗的初始位置,如果隨機產(chǎn)生的初始值是不利的,隨著迭代次數(shù)的增加,海鷗種群的多樣性會下降,導致算法提前收斂,陷入局部最優(yōu)。為了解決此問題,本文引入混沌優(yōu)化。混沌映射是一個完整的初始種群,可以確保初始種群始終進行無序隨機運動。混沌變量在一定范圍內(nèi)具有隨機性、遍歷性和規(guī)律性的特點,與SOA 算法相結(jié)合可以豐富海鷗種群多樣性,從而避免陷入局部最優(yōu)[12]。選擇廣泛使用的logistic 映射作為混沌模型,以提高種群的初值。模型如下所示:

式中:μ為控制變量,值越大表示混亂程度越高,取值在[0,4];xn取值在[0,1]之間。
3 改進海鷗優(yōu)化算法在MPPT 中的應用
海鷗的位置代表光伏電池的輸出電壓,適應度值為光伏電池的輸出功率,具體迭代步驟如下。
步驟1:初始化種群規(guī)模,最大迭代次數(shù)t=1 000,fc的初始值設為2,rd在[0,1]內(nèi)隨機選取,θ是[0,2π]范圍內(nèi)的隨機角度值。u和v的值設為1,混沌控制變量μ設為4。
步驟2:使用計算適應度函數(shù)Ps(i)計算每只海鷗的適應度值。
步驟3:根據(jù)式(13)利用改進后的非線性公式計算新的附加變量A的值。
步驟4:根據(jù)式(7)計算新的海鷗位置,用式(8)~(12)計算海鷗攻擊新位置Ps(i),并檢查更新后的位置是否越界。
步驟5:得到海鷗更新的位置,再次計算更新后的海鷗個體位置適應度值,通過比較再次更新位置和最優(yōu)適應度值。
步驟6:判斷算法執(zhí)行是否運行至最大迭代次數(shù),若運行到達則輸出最佳海鷗位置(Ubest)和適應值(Pbest),且算法結(jié)束;若不滿足,則跳轉(zhuǎn)到步驟3 繼續(xù)搜索。
相關(guān)的流程如圖5 所示。

圖5 改進海鷗優(yōu)化算法在MPPT中的應用
4 仿真實驗
為了驗證I-SOA 算法在光伏MPPT 系統(tǒng)中的有效性,在Matlab/Simulink 中搭建了由三個光伏組件串聯(lián)構(gòu)成的光伏陣列模塊、I-SOA 算法的MPPT 控制模塊、Boost 變換器模塊以及PWM 驅(qū)動模塊。如圖6 所示,Boost 電路的參數(shù)設置為:C1=50μF,C2=100μF,L=5 mH,R=150 Ω。

圖6 MPPT控制系統(tǒng)仿真模型
4.1 靜態(tài)環(huán)境下的仿真分析
靜態(tài)條件下的仿真中,仿真溫度設置為標準溫度25 ℃,PV1 為1 000 W/m2,PV2 為800 W/m2,PV3 為600 W/m2。此時理論最大輸出功率為382.5 W(由圖3 知)。圖7 為I-SOA 算法、SOA 算法及PSO 算法在靜態(tài)陰影條件下的仿真效果對比圖。表2 給出了這三種控制方法的各項對比。其中I-SOA 算法在0.178 4 s 追蹤到了最大功率382.3 W,與理論值382.5 W僅差0.2 W,追蹤效率為99.95%,相比于另外兩種控制方法,在收斂時間以及追蹤效率上都有提升。
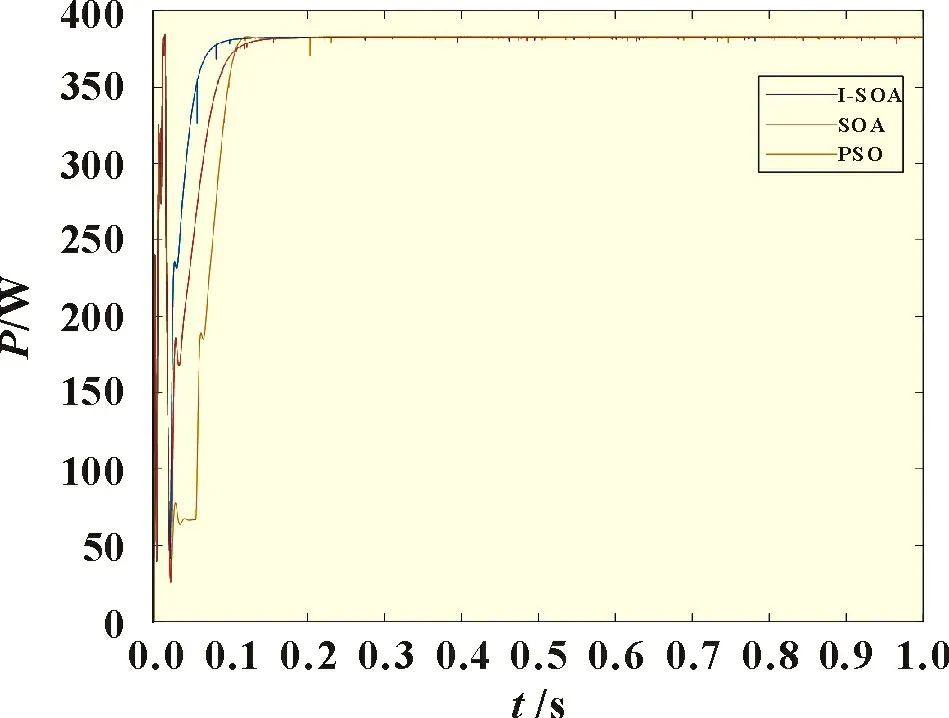
圖7 靜態(tài)條件下的仿真結(jié)果
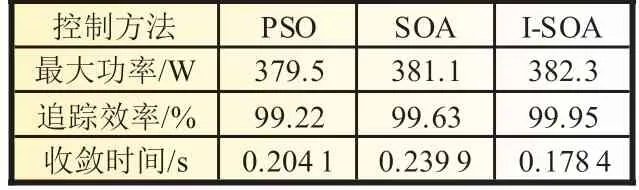
表2 三種算法運行結(jié)果對比
4.2 動態(tài)條件下的仿真分析
由于環(huán)境和天氣因素的影響,光伏陣列受到的光照強度會隨時發(fā)生改變,因此進行如下仿真實驗:PV1為1 000 W/m2,PV2 為800 W/m2,PV3 為400 W/m2,在0.5 s 時,PV1 受到的光照強度從1 000 W/m2下降到400 W/m2,仿真結(jié)果如圖8 所示。環(huán)境在0.5 s 發(fā)生突變時理論最大功率為245.8 W(由圖3 知)。I-SOA 算法在0.733 4 s 收斂到了最大功率244.9 W,與理論值245.8 W 僅差0.9 W,追蹤效率為99.63%;SOA 算法和傳統(tǒng)的PSO 算法追蹤最大功率失敗,陷入了局部最優(yōu)。

圖8 動態(tài)條件下的仿真結(jié)果
仿真結(jié)果表明,I-SOA 算法可在動態(tài)條件下成功搜索到全局最大功率點,并且可以穩(wěn)定輸出功率。
5 結(jié)論
本文提出了一種改進海鷗優(yōu)化算法的MPPT 控制方法,針對SOA 全局優(yōu)化搜索過程為線性、易因過早收斂而陷入局部最優(yōu)的問題進行改進。對SOA 的附加變量因子進行非線性處理,以適應光伏P-U 曲線呈現(xiàn)的非線性特征;引入混沌序列,增加種群位置的多樣性,提高算法跳出局部最優(yōu)的能力。在Matlab/Simulink 中搭建模型,在不同環(huán)境下與SOA、PSO進行仿真對比,結(jié)果表明,本文提出的改進海鷗優(yōu)化算法的MPPT 控制方法可以快速準確地跟蹤到全局最大功率,極大地提升了光伏利用效率,具有實際應用價值。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
