基于BDS-3 PPP-B2b服務的實時PPP性能分析
2022-05-26 05:51:22朱恩慧郭海榮李金龍肖浩威
大地測量與地球動力學 2022年6期
朱恩慧 郭海榮 李金龍 肖浩威 段 然
1 北京衛星導航中心,北京市永豐路5128信箱,100094 2 廣州南方測繪科技股份有限公司,廣州市思成路39號,510663
2020-07 BDS-3正式建成并開通服務,播發B1I、B1C、B2a、B2b和B3I等5個公開服務信號,為用戶提供定位導航授時、精密單點定位、星基增強、短報文通信和中軌搜救等服務。其中3顆GEO衛星在我國及周邊地區播發PPP-B2b信號,為用戶提供公開、免費的動態dm級、靜態cm級定位服務[1-2]。目前關于BDS-3 PPP-B2b服務的實時PPP性能分析研究還處于起步階段,Tao等[3]對比分析PPP-B2b改正信息與IGS法國空間研究中心的RTS產品表明,PPP-B2b 可在亞洲地區提供穩定的服務,可用性和完整性均比RTS好,在中國區域服務精度可達cm級。Ren等[4]對PPP-B2b改正信息與MGEX最終產品進行比較,研究BDS-3衛星在R、A、C方向上實時軌道精度和鐘差誤差精度。宋偉偉等[5]針對全球連續監測評估系統測站數據,評估基于PPP-B2b信號的軌道和鐘差精度得出,BDS-3軌道產品R、A、C方向精度均值分別為0.1 m、0.31 m、0.3 m,鐘差精度均方根的均值為2.26 ns。黃倫文等[6]研究得出,B2b軌道產品R、A、C方向精度分別優于0.07 m、0.33 m、0.24 m,鐘差STD優于0.08 ns,靜態PPP定位N、E、U方向精度RMS分別達到0.8 cm、1.5 cm、1.6 cm,動態PPP定位精度RMS分別達到3.6 cm、6.0 cm、12.2 cm,可滿足導航與位置服務、大地測量等應用服務需求。
基于以上研究,本文利用在北京、成都、拉薩、烏魯木齊4個地區采集的數據,對基于BDS-3 PPP-B2b改正參數的PPP服務性能進行評估實驗。
1 PPP-B2b精密單點定位處理過程
1.1 PPP模型與數據處理策略
BDS-3通過GEO衛星向用戶播發實時軌道、鐘差和碼偏差改正信息,用戶結合廣播星歷和雙頻偽距、載波觀測數據來實現實時PPP。隨著PPP-B2b信號接口控制文件(interface ctrol document,ICD)的公布[1],用戶可以根據ICD的說明對PPP-B2b信號播發的改正信息進行解析,再配合接收機觀測數據和廣播星歷,即可實現PPP功能[2]。
本文以測站雙頻觀測數據、B1C信號廣播星歷和PPP-B2b信號播發的改正信息為輸入,采用雙頻無電離層組合模型進行定位解算,對于對流層延遲干分量、相位纏繞、相對論效應、固體潮與海潮、地球自轉等誤差采用模型進行改正,對于一些難以精確模型化的誤差,如對流層延遲濕分量,則作為附加參數進行估計。因此,估計的參數包含測站坐標、接收機鐘差、天頂對流層濕分量延遲和無電離層組合模糊度等4類參數,采用Kalman濾波進行參數估計[7-8],具體處理流程如圖1所示。
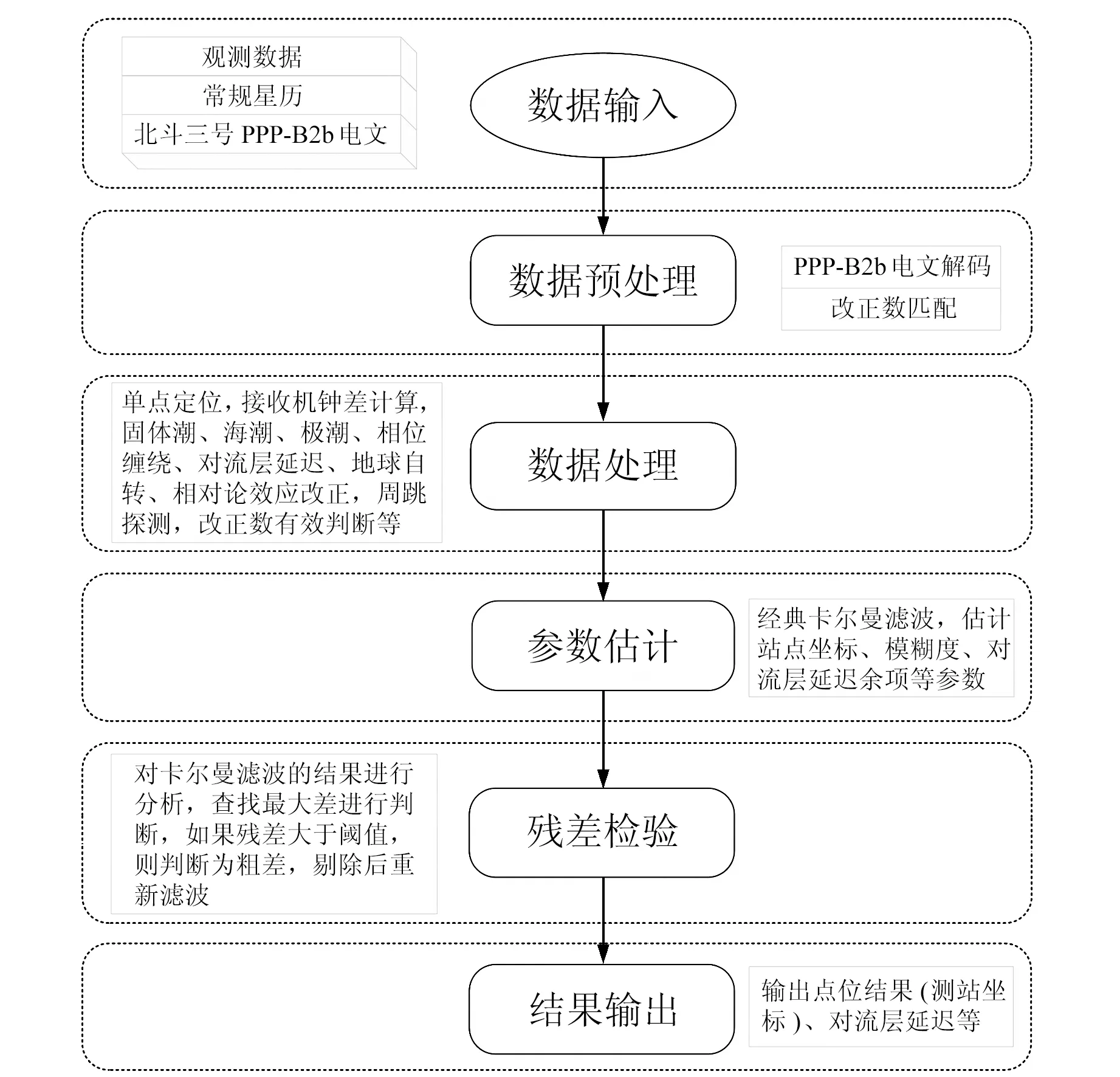
圖1 基于PPP-B2b服務的PPP處理流程Fig.1 PPP processing flow based on PPP-B2b service
1.2 與常規PPP處理策略的差異
基于PPP-B2b改正的PPP與常規PPP處理策略相比有2點差異:1)用戶通過接收終端獲取衛星實時軌道、鐘差和碼偏差改正信息后,需與廣播星歷參數結合才可得到最終的精密衛星軌道和鐘差;2)基于PPP-B2b改正信息獲取的精密衛星軌道參考點為相位中心,在PPP處理中無需進行衛星天線相位偏差改正,而基于IGS產品的常規PPP處理衛星軌道參考點為衛星質心,需要對衛星天線相位偏差進行修正。2種方式的具體對比如表1所示。

表1 PPP-B2b電文與IGS精密軌道、鐘差參與處理策略對比
1.3 改正參數匹配性問題
BDS-2導航電文(D1、D2)中定義了數據齡期AOD(age of data),AOD表示衛星星歷和鐘差參數的外推時間間隔[9],與相應的星歷參數無確定的對應關系,存在2組不同星歷參數(如連續2h的星歷)對應同一個AOD情況,無法通過AOD來識別衛星星歷和鐘差參數變化。為了保證不同信息類型所播發信息內容的關聯性,BDS-3采用數據期卷IOD(issue of data)對信息進行標識,其中IOD SSR表示狀態空間描述,IODP表示衛星掩碼的數據版本號,IODN表示GNSS下行信號播發的星鐘、星歷的數據版本號,IOD Corr表示軌道改正數和鐘差改正數的版本號。當BDS-3衛星星歷和鐘差參數變化時對應的IOD參數也會相應改變,且在一段時間內取值唯一[10]。
在使用PPP-B2b電文信息和B1C-CNAV1 廣播星歷結合進行PPP的過程中,還需要注意改正參數之間匹配性問題。
1.3.1 改正參數與廣播星歷匹配
BDS-3用戶在使用PPP-B2b電文改正信息選擇相匹配的廣播星歷時,通過IODN參數標識PPP-B2b信號所播發星鐘、星歷的數據版本號,用戶可通過PPP-B2b軌道改正信息中的IODN參數選擇與改正信息相匹配的廣播星歷,BDS-3廣播星歷中的IODC參數與PPP-B2b信號中的IODN參數相對應,而IODC參數會隨著廣播星歷的更新發生變化,由于改正參數IODN存在時間延遲,在廣播星歷更新的初始幾個歷元,IODC參數往往與PPP-B2b改正數歷元IODN參數標識無法匹配,此時應注意仍采用舊的廣播星歷IODC參數標識與改正數參數進行匹配,直至PPP-B2b改正參數IODN標識更新。
1.3.2 軌道與鐘差改正參數匹配
PPP-B2b改正電文通過IOD Corr參數標識軌道改正數和鐘差改正數的版本號,可用該參數對軌道和鐘差改正參數進行匹配,僅當鐘差改正數的IOD Corr與軌道改正數的IOD Corr相同時,二者方可匹配使用。相比于BDS-3衛星播發軌道誤差,衛星鐘差精度是制約導航定位精度的主要因素之一。考慮到字節資源、精度要求等因素限制,鐘差改正參數的更新頻率比軌道改正參數更高,鐘差改正數更新頻率為6 s,軌道改正數更新頻率為48 s,2種改正數大部分時間都是匹配的,鐘差改正參數更新而軌道參數不更新或者同時更新的情況較多,但此時2種改正參數還在使用同一個IOD Corr參數進行識別,仍處于匹配狀態。僅當鐘差改正數進行更新且其IOD Corr發生變化時,軌道改正數和鐘差改正數才會從原來的匹配狀態變為不匹配,而且所有衛星的IOD Corr通常同時發生變化,這會導致該時間段內的改正信息均無法匹配使用,此時應采用前面與軌道相匹配的鐘差改正數進行改正,直至軌道改正參數標識IOD Corr更新完畢。另外,由于軌道參數會很快更新,對定位結果影響不大。
2 定位性能評估
2.1 PPP-B2b改正信息精度分析
在評估BDS-3 PPP-B2b服務實時PPP性能之前,首先分析PPP-B2b改正信息精度。本文以GFZ發布的BDS-3精密產品作為PPP-B2b信息精度評估參考基準[11]。選取2020-10-04~06的數據,分析比較BDS-3衛星PPP-B2b精密軌道和鐘差改正精度,表2給出了PPP-B2b改正信息精度統計。
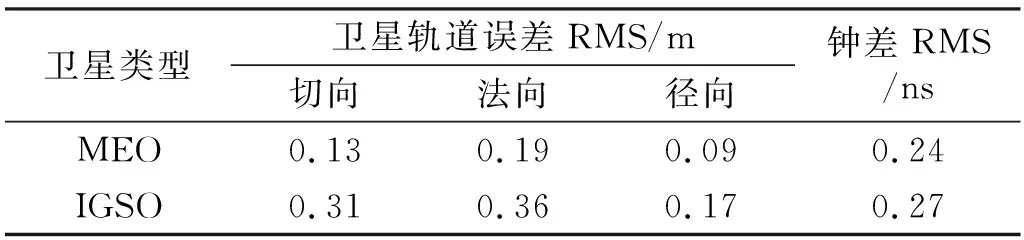
表2 PPP-B2b改正信息精度
由表2可知,BDS-3 MEO衛星經PPP-B2b改正后軌道均方根誤差統計在徑向、切向和法向方向均優于0.2 m,而IGSO衛星徑向、切向和法向方向均優于0.4 m;所有BDS-3衛星經PPP-B2b改正后的鐘差均方根誤差均低于0.3 ns。MEO衛星軌道精度略優于IGSO衛星,其差異原因與衛星軌道類型有關[12]。
2.2 實驗數據與處理策略
采集北京、成都、拉薩、烏魯木齊4個測站2020-10-04~10的數據,采樣間隔為30 s,基于所采集觀測數據以及PPP-B2b改正信息進行靜態和仿動態實時PPP,具體處理策略見表3。靜態和仿動態PPP主要區別在于坐標參數在濾波中的過程噪聲不同。前者認為單點定位結果為常量,以測站給出的坐標真值作為參考值;后者以對應歷元的單點定位結果作為先驗值,先驗方差設置為30 m2。關于雙頻組合選擇,考慮到B1C與B2a信號為BDS-3新體制信號、B1I和B3I為BDS-2向BDS-3平穩過渡信號,本文以B1C+B2a和B1I+B3I兩種雙頻組合為例進行分析。

表3 基于PPP-B2b改正參數的實時PPP數據處理策略
2.3 定位精度
圖2與圖3分別給出北京站和成都站靜態和仿動態條件下2020-10-04(doy278)B1C+B2a、B1I+B3I雙頻實時PPP誤差序列。由圖可知,在靜態條件下,B1C+B2a和B1I+B3I定位模式均能很快收斂至cm級;在仿動態條件下,B1C+B2a和B1I+B3I模式定位結果與參考結果吻合較好,所有定位結果基本一致,均在一定時間內完成收斂,且收斂后定位誤差穩定在21 cm以內。

圖2 北京站實時精密單點定位誤差序列Fig.2 Real-time PPP error sequence at Beijing station

圖3 成都站實時精密單點定位誤差序列Fig.3 Real-time PPP error sequence at Chengdu station
本文以定位誤差序列均方根統計值作為精度統計結果,表4和表5分別給出4個測站靜態和仿動態條件下E、N、U三個方向以及水平(H)、三維(3D)定位精度統計。由表4可知,靜態條件下,各測站B1C+B2a和 B1I+B3I定位模式在E、N、U三個方向定位精度均優于11 cm,H方向定位精度均優于9 cm,3D方向優于14 cm;由表5可知,仿動態條件下,各測站2種定位模式在E、N、U三個方向定位精度均優于22 cm,H方向定位精度均優于17 cm,3D方向優于27 cm。對比分析B1C+B2a、B1I+B3I模式定位精度可知,無論是靜態還是仿動態條件下,B1C+B2a組合定位精度均值均小于B1I+B3I組合定位精度均值,說明B1C+B2a組合定位精度略優于B1I+B3I組合,其原因與雙頻消電離層組合噪聲放大情況有關:B1C+B2a組合噪聲放大系數略低于B1I+B3I組合噪聲放大系數。

表4 基于PPP-B2b改正信息的BDS-3靜態PPP 定位精度統計

表5 基于PPP-B2b改正信息的北斗三號仿動態PPP 定位精度統計
2.4 收斂時間
收斂時間定義為滿足定位精度要求且至少持續5 min。為了測試仿動態處理模式的收斂時間,對所選測站的數據進行處理,處理策略與上文相同,每隔1 h進行一次初始化,以水平方向定位精度不超過0.3 m、高程方向定位精度不超過0.6 m作為收斂精度要求,統計達到指定精度的收斂時間。分別統計4個測站2020-10-04~06每天24組數據的收斂時間,對所有數據的收斂時間取均值得到最終的收斂時間統計結果。圖4給出B1C+B2a和B1I+B3I模式達到指定精度的平均收斂時間。由圖4可知,4個測站2種模式的收斂時間均不超過15 min;成都站和北京站達到既定精度的收斂時間略低于拉薩站和烏魯木齊站;除成都站外,B1C+B2a收斂時間均少于B1I+B3I。

圖4 仿動態條件下2種模式的定位收斂時間Fig.4 Positioning convergence time of two modes underimitation dynamic simulation conditions
為進一步分析基于PPP-B2b改正參數的PPP收斂性能,分別統計水平和高程方向收斂到0.1 m、0.2 m、0.3 m和02. m、0.4 m、0.6 m所需要的時間,如表6(單位min)所示。
由表6可見,仿動態條件下,B1C+B2a 和B1I+B3I 定位精度收斂到水平方向、高程方向分別不超過0.2 m、0.4 m所需時間為19.6 min、20.4 min;收斂到水平、高程方向分別不超過0.1 m、0.2 m所需時間為44.1 min、42.3 min。B1C+B2a的收斂時間總體上略少于B1I+B3I。
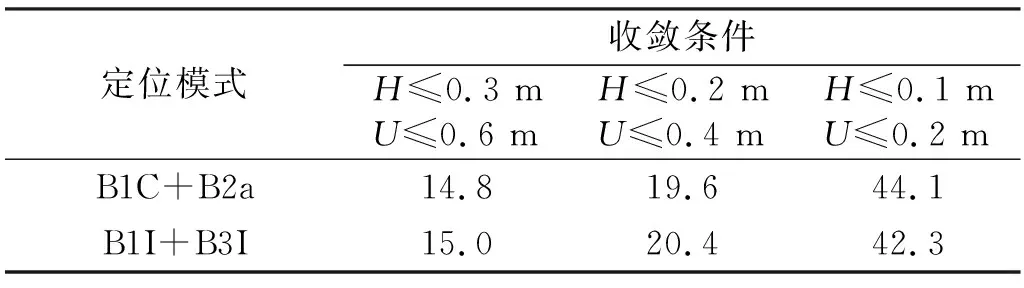
表6 仿動態條件下收斂時間
3 結 語
本文以4個測站雙頻觀測數據、B1C信號廣播星歷和PPP-B2b信號播發的改正信息為輸入,分析在使用PPP-B2b電文信息進行PPP過程中需要注意的改正參數之間2個匹配性問題以及基于PPP-B2b改正參數的實時PPP性能。得出如下結論:
1)改正參數匹配性方面。BDS-3廣播星歷中的IODC參數與PPP-B2b信號中的IODN參數相對應,在廣播星歷更新的初始幾個歷元往往與PPP-B2b改正數歷元無法匹配,此時應注意仍采用舊的廣播星歷IODC參數標識與改正數參數進行匹配,直至PPP-B2b改正參數IODN標識更新完畢。PPP-B2b改正電文通過IOD Corr參數標識軌道改正數和鐘差改正數的版本號,鐘差改正數比軌道改正數更新頻率高,2種改正數大部分時間都是匹配的,當鐘差改正數進行更新且其IOD Corr發生變化時,兩者無法匹配,此時應采用前面與軌道相匹配的鐘差改正數進行改正,直至軌道改正參數標識IOD Corr更新完畢。
2)定位精度方面。在靜態條件下,B1C+B2a和 B1I+B3I定位模式水平方向定位精度優于9 cm,高程方向優于11 cm。在仿動態條件下,水平方向定位精度優于17 cm,高程方向定位精度優于22 cm。無論是在靜態還是仿動態條件下,B1C+B2a定位精度略優于B1I+B3I,這與雙頻消電離層組合噪聲放大情況有關:B1C+B2a組合噪聲放大系數低于B1I+B3I組合噪聲放大系數。
3)收斂時間方面。2種組合模式在仿動態條件下定位精度收斂到水平、高程方向不超過0.3 m、0.6 m所需時間均低于15 min,B1C+B2a的收斂時間總體上略少于B1I+B3I。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中華手工(2017年2期)2017-06-06 23:00:31
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
