智能駕駛整車(chē)仿真模型搭建方法研究
2022-05-27 14:54:40張峻熒蘇芮琦王士焜黃波
汽車(chē)科技 2022年3期
張峻熒 蘇芮琦 王士焜 黃波


張峻熒
畢業(yè)于湖南大學(xué)車(chē)輛工程專業(yè),本科學(xué)歷。現(xiàn)就職于襄陽(yáng)達(dá)安汽車(chē)檢測(cè)中心有限公司,任智能網(wǎng)聯(lián)系統(tǒng)部件仿真試驗(yàn)技術(shù)主管工程師,主要研究方向是智能網(wǎng)聯(lián)系統(tǒng)及部件仿真技術(shù)。
摘? 要:本文提出了一種用于智能駕駛系統(tǒng)或部件仿真驗(yàn)證的整車(chē)仿真模型搭建方法,基于系統(tǒng)級(jí)建模思維對(duì)整車(chē)進(jìn)行模塊化分析確定建模思路,從實(shí)車(chē)試驗(yàn)數(shù)據(jù)獲取關(guān)鍵技術(shù)參數(shù),再結(jié)合基本的車(chē)輛結(jié)構(gòu)參數(shù)建立實(shí)車(chē)各子系統(tǒng)等效仿真模型。本文基于veDYNA和Simulink聯(lián)合仿真軟件搭建了某款純電動(dòng)車(chē)輛的整車(chē)模型用于自動(dòng)駕駛控制器仿真測(cè)試,驗(yàn)證數(shù)據(jù)表明模型滿足仿真驗(yàn)證需求。
關(guān)鍵詞:車(chē)輛模型;仿真測(cè)試;veDYNA;系統(tǒng)級(jí)建模
中圖分類號(hào):U467.1? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A? ? ? 文章編號(hào):1005-2550(2022)03-0039-05
Research on Building Method of Intelligent Driving Vehicle Simulation Model
ZHANG Jun-ying, SU Rui-qi, WANG Shi-kun, HUANG Bo
( Xiangyang Da An Automobile Test Center CO., LTD,? Xiangyang 441004, China)
Abstract: This paper proposes a vehicle simulation model building method for intelligent driving system or component simulation verification. Based on system-level modeling thinking, the vehicle is modularized to determine the modeling ideas. The key technical parameters are obtained from actual vehicle test datas, which are combined with the basic vehicle structure parameters to establish an equivalent simulation model of each vehicle subsystem. Based on the Co-simulation software of veDYNA and Simulink, this paper builds a full-vehicle model of a pure electric vehicle for the simulation test of an automatic driving controller. The verification data shows that the model meets the requirements of simulation verification.
Key Words: vehicle model; simulation test; veDYNA; system-level modeling
1? ? 引言
隨著智能駕駛技術(shù)水平的提高,相關(guān)產(chǎn)品智能化和自動(dòng)化水平不斷提升,由系統(tǒng)執(zhí)行動(dòng)態(tài)駕駛?cè)蝿?wù)的場(chǎng)景范圍、持續(xù)時(shí)長(zhǎng)擴(kuò)展快速。在智能駕駛產(chǎn)品快速進(jìn)入市場(chǎng)的同時(shí),自動(dòng)駕駛車(chē)輛事故數(shù)量和頻次也在增加,其可靠性越來(lái)越受大眾關(guān)注和質(zhì)疑。為了保證智能駕駛產(chǎn)品的安全性,特別是應(yīng)對(duì)復(fù)雜場(chǎng)景、極端場(chǎng)景的能力,行業(yè)內(nèi)基本達(dá)成共識(shí):仿真測(cè)試、封閉場(chǎng)地測(cè)試、公開(kāi)道路測(cè)試相結(jié)合是智能駕駛產(chǎn)品驗(yàn)證性價(jià)比最高、最可靠的手段。
在智能駕駛仿真測(cè)試中,通過(guò)車(chē)輛動(dòng)力學(xué)仿真軟件模擬實(shí)車(chē)來(lái)滿足感知、規(guī)劃決策、控制閉環(huán)測(cè)試需求是關(guān)鍵技術(shù)之一。為了保證良好的仿真精度和準(zhǔn)確性以更客觀地評(píng)測(cè)待測(cè)系統(tǒng),一是需要成熟、專業(yè)的車(chē)輛仿真軟件,二是需要依據(jù)實(shí)車(chē)參數(shù)進(jìn)行精準(zhǔn)建模。目前行業(yè)內(nèi)普及較廣的專業(yè)車(chē)輛動(dòng)力學(xué)軟件有PanoSim、 CarMaker/TruckMaker、veDYNA、CarSim/TruckSim等,本文是在veDYNA中進(jìn)行整車(chē)建模的,veDYNA支持模型參數(shù)化配置、各種車(chē)輛類型配置、線控接口采用Simulink建模接口易于擴(kuò)展自定義功能。在整車(chē)仿真模型搭建方面,目前主要有兩種路徑:一種是從車(chē)輛物理結(jié)構(gòu)角度,通過(guò)配置非常詳細(xì)的車(chē)輛結(jié)構(gòu)特性參數(shù)來(lái)進(jìn)行仿真模擬,這種方式需要車(chē)輛上每個(gè)部件的參數(shù)均非常詳盡,比較適合車(chē)輛機(jī)械性能方面的仿真;另一種是從汽車(chē)動(dòng)力學(xué)理論角度,基于實(shí)車(chē)行車(chē)不同工況的動(dòng)力學(xué)特性將整車(chē)分解到子系統(tǒng)級(jí)而不是部件級(jí)進(jìn)行建模,這種方式比較簡(jiǎn)單且需要的參數(shù)相比前一種方式少很多,比較適合智能汽車(chē)仿真測(cè)試,所以本文采用的是第二種方式,根據(jù)子系統(tǒng)件各部件間的相對(duì)運(yùn)動(dòng)關(guān)系定義相應(yīng)的拓?fù)浣Y(jié)構(gòu)并對(duì)其進(jìn)行“整合”,將相對(duì)間沒(méi)有明確運(yùn)動(dòng)關(guān)系的部件當(dāng)作一個(gè)整體來(lái)建模。
2? ? 車(chē)輛模型分析
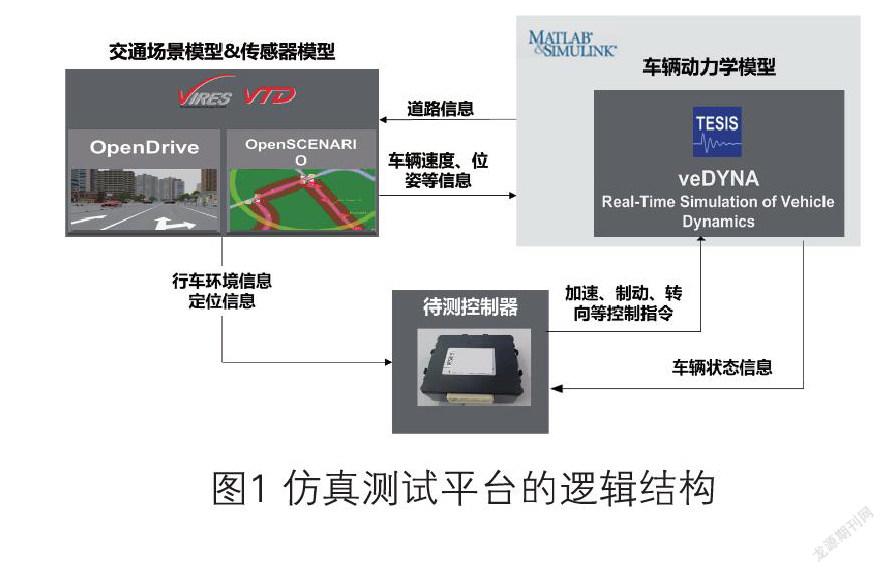
本文以滿足某款自動(dòng)駕駛控制器HIL仿真測(cè)試的需求來(lái)探討和分析整車(chē)模型搭建的方法。仿真測(cè)試平臺(tái)的邏輯結(jié)構(gòu)如圖1所示,其中車(chē)輛動(dòng)力學(xué)模型中包含了車(chē)體、懸掛系統(tǒng)、動(dòng)力系統(tǒng)、傳動(dòng)系統(tǒng)、制動(dòng)系統(tǒng)、轉(zhuǎn)向系統(tǒng)等的參數(shù)化模塊以及線控I/O接口,當(dāng)車(chē)輛動(dòng)力學(xué)模型接收到待測(cè)控制器的加速、制動(dòng)、轉(zhuǎn)向等控制指令后,依據(jù)復(fù)雜的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)實(shí)時(shí)計(jì)算得到新的車(chē)輛位姿、狀態(tài)信息,并將更新的數(shù)據(jù)發(fā)送給其它模塊來(lái)模擬真實(shí)車(chē)輛的運(yùn)動(dòng)行為。
汽車(chē)是一個(gè)復(fù)雜的系統(tǒng),可以抽象成單軌模型、雙軌模型或者各多自由度的非線性模型。構(gòu)建高精度、多自由度的車(chē)輛模型需要參數(shù)類型和數(shù)量較多,待測(cè)控制器裝配的實(shí)車(chē)是一輛低速運(yùn)行的純電動(dòng)車(chē)輛,能夠獲取的實(shí)車(chē)參數(shù)無(wú)法滿足高精度復(fù)雜的車(chē)輛動(dòng)力學(xué)模型構(gòu)建需求,因此構(gòu)建高效、簡(jiǎn)單的車(chē)輛動(dòng)力學(xué)模型但能較精確反映各種行駛工況下的車(chē)輛動(dòng)力學(xué)和運(yùn)動(dòng)狀態(tài)是客觀評(píng)測(cè)待測(cè)自動(dòng)駕駛控制器的關(guān)鍵。
對(duì)應(yīng)自動(dòng)駕駛控制器加速、制動(dòng)、轉(zhuǎn)向三個(gè)關(guān)鍵動(dòng)作指令,構(gòu)建車(chē)輛模型時(shí)從分析實(shí)車(chē)在不同工況下響應(yīng)三個(gè)指令的行為數(shù)據(jù)入手,重點(diǎn)聚焦在基于仿真軟件已有基礎(chǔ)模型、實(shí)車(chē)可獲取參數(shù)搭建對(duì)應(yīng)的驅(qū)動(dòng)單元、制動(dòng)單元和轉(zhuǎn)向單元模塊使其在不同仿真工況下的整車(chē)行為與實(shí)車(chē)數(shù)據(jù)規(guī)律高度一致。
2.1? ?驅(qū)動(dòng)系統(tǒng)
待測(cè)控制器發(fā)送給實(shí)車(chē)動(dòng)力系統(tǒng)的加速指令是油門(mén)踏板開(kāi)度,待模擬的實(shí)車(chē)是純電驅(qū)車(chē)輛,前輪驅(qū)動(dòng)、無(wú)變速箱,除基本的輪胎尺寸參數(shù)外可獲取的參數(shù)只有電機(jī)輸出驅(qū)動(dòng)力和油門(mén)開(kāi)度指令關(guān)系。veDYNA軟件自帶的動(dòng)力模塊中只有傳統(tǒng)燃油車(chē)模型,其動(dòng)力系統(tǒng)&傳動(dòng)系統(tǒng)不能直接用于模擬該實(shí)車(chē)的驅(qū)動(dòng)系統(tǒng),需要依據(jù)關(guān)系進(jìn)行等效動(dòng)力學(xué)轉(zhuǎn)換。假設(shè)不考慮各驅(qū)動(dòng)輪差異和離合影響,兩者簡(jiǎn)化的等效關(guān)系如式(1)所示,其中TEngOut是發(fā)動(dòng)機(jī)輸出扭矩,i1、i2、i3分別表示變速箱、主減速器、輪邊減速器減速比,TMorMax是電機(jī)輸出的最大力矩,AccPed是自動(dòng)駕駛控制器油門(mén)開(kāi)度指令。
TEngOut×i1×i2×i3=TMorMax×AccPed? ? ? ?(1)
為了簡(jiǎn)化模型搭建過(guò)程,設(shè)置i3=1,i2為常值,這樣可以通過(guò)實(shí)時(shí)調(diào)節(jié)變速箱的變速比來(lái)進(jìn)行等效轉(zhuǎn)換。
2.2? ?制動(dòng)系統(tǒng)
待測(cè)控制器在自動(dòng)駕駛模式時(shí)發(fā)送給實(shí)車(chē)制動(dòng)系統(tǒng)的制動(dòng)指令是目標(biāo)減速度,可獲取的待模擬實(shí)車(chē)動(dòng)力學(xué)參數(shù)只有制動(dòng)力分配系數(shù),無(wú)制動(dòng)器制動(dòng)力、輪胎力學(xué)參數(shù)、制動(dòng)力傳遞時(shí)間、制動(dòng)效率等相關(guān)參數(shù),而veDYNA是通過(guò)控制制動(dòng)踏板開(kāi)度實(shí)時(shí)調(diào)節(jié)制動(dòng)力矩的。因此對(duì)于制動(dòng)系統(tǒng)的仿真模型搭建,將實(shí)車(chē)整體作為分析對(duì)象的方法會(huì)比較適用:同步采集實(shí)際道路工況中目標(biāo)減速度和實(shí)際減速度數(shù)據(jù),對(duì)不同工況的數(shù)據(jù)進(jìn)行統(tǒng)計(jì)、分析、構(gòu)建關(guān)系模型。相應(yīng)地在veDYNA中以整車(chē)減速度響應(yīng)與實(shí)車(chē)數(shù)據(jù)一致為目的進(jìn)行建模:依據(jù)實(shí)車(chē)類型從veDYNA模型庫(kù)中選擇一個(gè)基礎(chǔ)制動(dòng)模型作為模板,再通過(guò)位置式比例積分PI控制器進(jìn)行建模和調(diào)參來(lái)調(diào)節(jié)制動(dòng)踏板開(kāi)度以搭建減速度控制模塊,其中BrkPed(n)是n時(shí)刻輸出給veDYNA制動(dòng)踏板開(kāi)度,TrgtDec為待測(cè)控制器的目標(biāo)減速度,ActDec為當(dāng)前veDYNA實(shí)際減速度。
BrkPed(n)=Kp×en+Ki×∑j=1ej? ? ? ? ? ? (2)
其中en和ej計(jì)算如下,并且需要對(duì)積分部分進(jìn)行限幅處理。
en=(TrgtDec(n-k)-ActDec(n-k))
ej=(TrgtDec( j)-ActDec( j))
2.3? ?轉(zhuǎn)向系統(tǒng)
待測(cè)控制器在自動(dòng)駕駛模式時(shí)發(fā)送給實(shí)車(chē)轉(zhuǎn)向系統(tǒng)的轉(zhuǎn)向指令是方向盤(pán)目標(biāo)角度,待模擬實(shí)車(chē)可獲取車(chē)輛轉(zhuǎn)向系統(tǒng)參數(shù)有軸距、輪距、理論/設(shè)計(jì)轉(zhuǎn)向比,無(wú)更多轉(zhuǎn)向響應(yīng)環(huán)節(jié)中的關(guān)鍵特性參數(shù)。本文將轉(zhuǎn)向單元簡(jiǎn)化成單軌模型,通過(guò)采集實(shí)車(chē)數(shù)據(jù)分析轉(zhuǎn)向系統(tǒng)常值和非線性參數(shù),包括:轉(zhuǎn)向系統(tǒng)機(jī)械間隙,實(shí)際轉(zhuǎn)向比,不同方向盤(pán)角度輸入下的轉(zhuǎn)向響應(yīng)延遲環(huán)節(jié)特性參數(shù)、滯回環(huán)節(jié)特性參數(shù)、轉(zhuǎn)向角速度等。
采用單軌模型忽略轉(zhuǎn)向內(nèi)外輪轉(zhuǎn)向差,轉(zhuǎn)向主銷距用轉(zhuǎn)向軸輪距進(jìn)行近似,基于這樣的假設(shè),對(duì)應(yīng)轉(zhuǎn)彎半徑模型近似為式(3),其中Rs為轉(zhuǎn)彎半徑,L為前后軸軸距,θw為方向盤(pán)轉(zhuǎn)角,is為轉(zhuǎn)向比即方向盤(pán)角度和轉(zhuǎn)向輪角度的比值。
(3)
采集實(shí)車(chē)運(yùn)動(dòng)軌跡離散坐標(biāo)點(diǎn),采用最小二乘法將該運(yùn)動(dòng)軌跡擬合成二階曲線y=f (x),相應(yīng)地,運(yùn)動(dòng)軌跡的曲率半徑計(jì)算模型為:
(4)
在實(shí)車(chē)數(shù)據(jù)采集或者從實(shí)車(chē)數(shù)據(jù)中提取用于模型分析的工況數(shù)據(jù)時(shí),設(shè)計(jì)或者選取較穩(wěn)定的轉(zhuǎn)向角度輸入能提高模型計(jì)算精度,考慮減少計(jì)算量和算法適用性,本文選擇PT1濾波器對(duì)轉(zhuǎn)向角度進(jìn)行平滑處理,平滑后的轉(zhuǎn)向角輸入用于依據(jù)式(3)和式(4)求解實(shí)車(chē)實(shí)際轉(zhuǎn)向比、機(jī)械間隙、響應(yīng)延遲等特性參數(shù)的計(jì)算。
3? ? 車(chē)輛建模
在前述建模思路的基礎(chǔ)上,車(chē)輛建模的主要工作包括:搜集實(shí)車(chē)參數(shù)和試驗(yàn)數(shù)據(jù),分析實(shí)車(chē)試驗(yàn)數(shù)據(jù)以驗(yàn)證或獲取主要技術(shù)參數(shù),根據(jù)實(shí)車(chē)車(chē)型、驅(qū)動(dòng)方式、轉(zhuǎn)向方式在veDYNA選擇基礎(chǔ)模型作為建模模板,在veDYNA中配置車(chē)輛基本參數(shù),結(jié)合已配置參數(shù)與建模目標(biāo)差異在Simulink中搭建策略模塊和調(diào)參以實(shí)現(xiàn)等效轉(zhuǎn)換。
3.1? ?參數(shù)獲取
從實(shí)車(chē)測(cè)試數(shù)據(jù)中同步提取用于分析和建模的參數(shù)主要包括車(chē)輛運(yùn)動(dòng)軌跡參數(shù)、自動(dòng)駕駛控制模式下的車(chē)輛狀態(tài)參數(shù)和自動(dòng)控制器相關(guān)的指令參數(shù)。
(1)定位數(shù)據(jù):全局坐標(biāo)X、全局坐標(biāo)Y、全局坐標(biāo)Z、航向角。
(2)車(chē)輛數(shù)據(jù):各執(zhí)行模塊實(shí)際工作模式、實(shí)際車(chē)速、實(shí)際加/減速度、實(shí)際轉(zhuǎn)向角度、實(shí)際檔位。
(3)自動(dòng)駕駛控制器數(shù)據(jù):各執(zhí)行模塊的控制模式、目標(biāo)減速度、油門(mén)踏板開(kāi)度、方向盤(pán)目標(biāo)轉(zhuǎn)向角度、目標(biāo)檔位、目標(biāo)速度。
3.2? ?參數(shù)分析
根據(jù)實(shí)車(chē)與仿真建模等效轉(zhuǎn)換需求分析,需要從實(shí)車(chē)測(cè)試數(shù)據(jù)中分析得到的參數(shù)主要包括轉(zhuǎn)向響應(yīng)時(shí)間、轉(zhuǎn)向系統(tǒng)轉(zhuǎn)向比、轉(zhuǎn)向角度-轉(zhuǎn)向角速度關(guān)系、制動(dòng)響應(yīng)時(shí)間、目標(biāo)減速度-實(shí)際減速度關(guān)系、(空載)驅(qū)動(dòng)響應(yīng)時(shí)間、(空載)目標(biāo)油門(mén)踏板開(kāi)度-實(shí)際加速度關(guān)系。統(tǒng)計(jì)自動(dòng)駕駛模式下、典型行車(chē)場(chǎng)景、實(shí)車(chē)狀態(tài)較穩(wěn)定時(shí)的數(shù)據(jù)。
分析統(tǒng)計(jì)的數(shù)據(jù)確認(rèn)子系統(tǒng)動(dòng)態(tài)響應(yīng)特性,在分析結(jié)果上建立對(duì)應(yīng)的關(guān)系模型:轉(zhuǎn)向角度-角速度關(guān)系模型采用最鄰近模型,目標(biāo)油門(mén)踏板開(kāi)度-實(shí)際加速度和目標(biāo)減速度-實(shí)際減速度關(guān)系模型采用線性插值查表模型。
3.3? ?仿真建模
實(shí)車(chē)為前驅(qū)、前軸轉(zhuǎn)向,相應(yīng)地在veDYNA通用車(chē)輛參數(shù)、前軸參數(shù)、動(dòng)力傳輸三個(gè)界面完成車(chē)輛主要參數(shù)的配置。
為了構(gòu)建與實(shí)車(chē)純電驅(qū)動(dòng)系統(tǒng)等效的動(dòng)力模型,在veDYNA中配置了一個(gè)7檔自動(dòng)變速箱,對(duì)應(yīng)各檔位的變速比依據(jù)實(shí)車(chē)目標(biāo)油門(mén)踏板開(kāi)度-實(shí)際加速度關(guān)系模型調(diào)參得到。
在Simulink中分別搭建驅(qū)動(dòng)、制動(dòng)、轉(zhuǎn)向等效模型的轉(zhuǎn)換策略模塊:
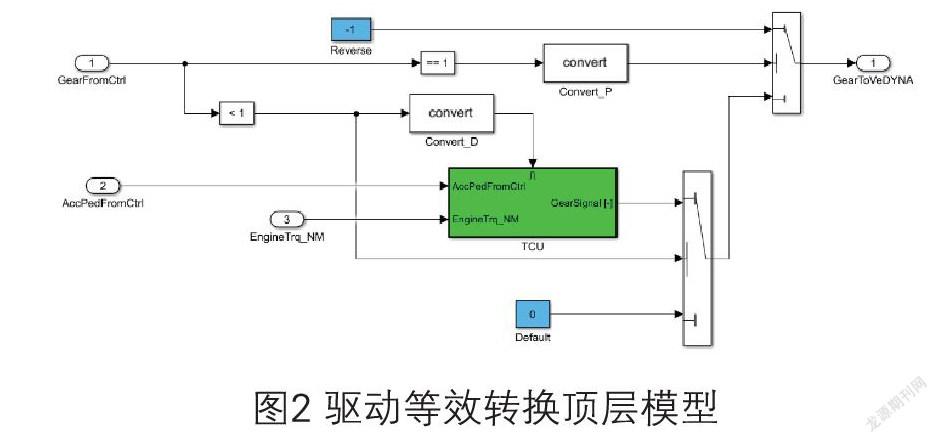
(1)待測(cè)控制器目標(biāo)油門(mén)踏板開(kāi)度指令-veDYNA油門(mén)踏板開(kāi)度關(guān)系模型如圖2所示,通過(guò)搭建合適的veDYNA換檔策略適配veDYNA發(fā)動(dòng)機(jī)模型,以滿足待測(cè)控制器油門(mén)踏板開(kāi)度指令對(duì)應(yīng)實(shí)車(chē)目標(biāo)驅(qū)動(dòng)力矩需求。
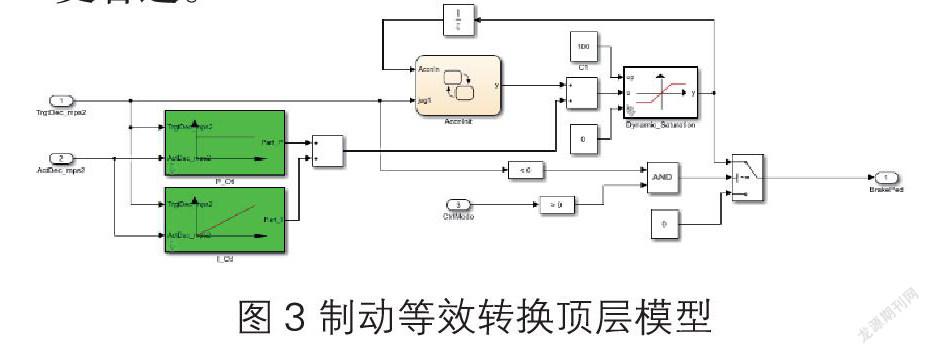
(2)待測(cè)控制器目標(biāo)減速度指令-veDYNA制動(dòng)踏板關(guān)系模型如圖3所示,通過(guò)構(gòu)建位置式PI控制器較精準(zhǔn)生成映射關(guān)系,從調(diào)參分析判斷分段PI更合適。
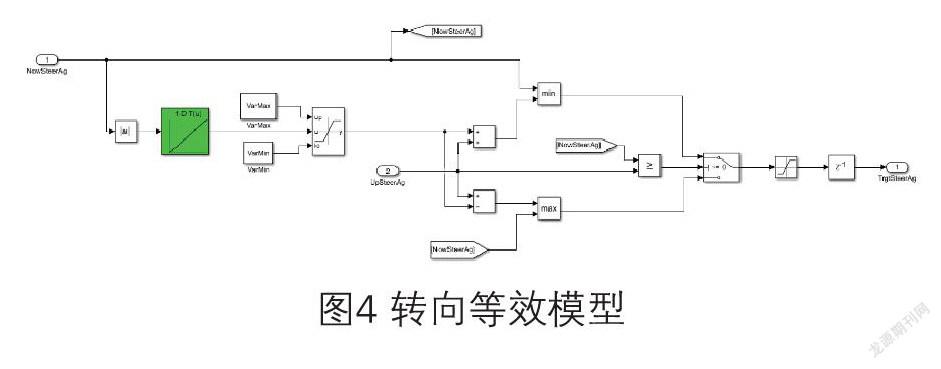
(3)待測(cè)控制器目標(biāo)轉(zhuǎn)向角度指令-veDYNA方向盤(pán)角度輸入關(guān)系模型如圖4所示,通過(guò)約束信號(hào)變化率生成實(shí)車(chē)轉(zhuǎn)向角速度特性。
4? ? 模型驗(yàn)證
因控制器在環(huán)的HIL仿真測(cè)試中仿真車(chē)輛相關(guān)動(dòng)作指令均由待測(cè)控制器內(nèi)部策略確定,無(wú)法根據(jù)驗(yàn)證需要進(jìn)行自定義。為了驗(yàn)證模型,通過(guò)設(shè)計(jì)同時(shí)包含直道和彎道的目標(biāo)軌跡保證仿真車(chē)輛在該軌跡上行駛時(shí)待測(cè)控制器會(huì)發(fā)出驅(qū)動(dòng)、制動(dòng)、轉(zhuǎn)向指令。設(shè)計(jì)的目標(biāo)軌跡如圖5所示:
在待測(cè)控制器控制仿真車(chē)輛沿著目標(biāo)軌跡行駛的過(guò)程中,采集典型的控制指令及其對(duì)應(yīng)的仿真車(chē)輛響應(yīng)數(shù)據(jù)來(lái)驗(yàn)證搭建的車(chē)輛模型。
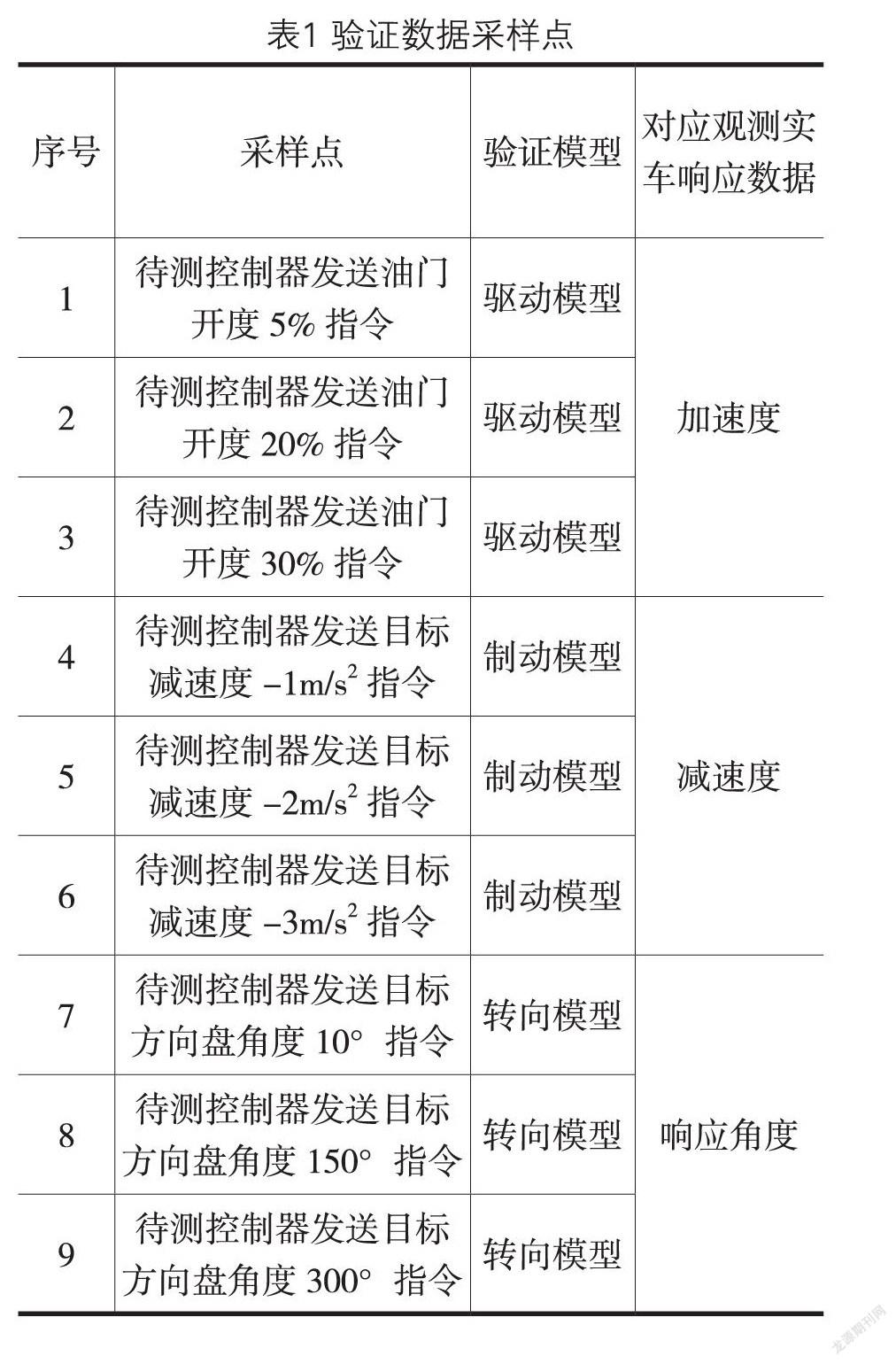
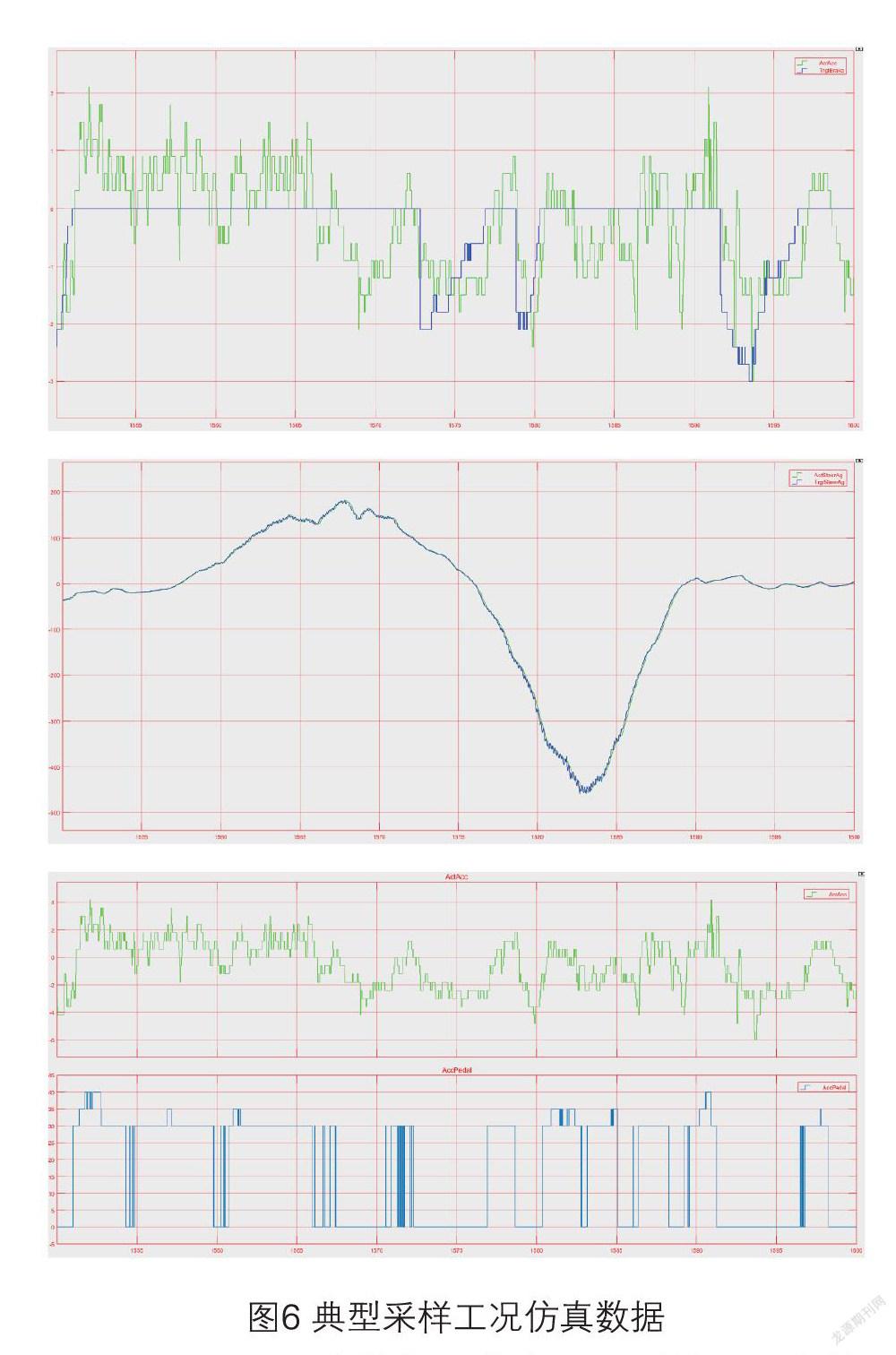
通過(guò)對(duì)比實(shí)車(chē)數(shù)據(jù)和仿真測(cè)試采樣工況點(diǎn)數(shù)據(jù),對(duì)搭建的仿真模型進(jìn)行校核,仿真數(shù)據(jù)如圖6所示。從對(duì)比數(shù)據(jù)可以看出,表1所列的典型采樣工況點(diǎn)附近,仿真模型響應(yīng)的加速度、減速度、轉(zhuǎn)向角度與等效模型目標(biāo)值即實(shí)車(chē)值高度一致,從而驗(yàn)證了整車(chē)模型。
5? ? 結(jié)語(yǔ)
本文提出一種高效、簡(jiǎn)單且能較精確反映各種行駛工況下的車(chē)輛動(dòng)力學(xué)和運(yùn)動(dòng)狀態(tài)的車(chē)輛動(dòng)力學(xué)模型構(gòu)建方法,不需要詳盡的車(chē)輛結(jié)構(gòu)特性參數(shù),主要基于系統(tǒng)級(jí)特性的建模思維,利用實(shí)車(chē)測(cè)試數(shù)據(jù)建立各子系統(tǒng)等效仿真模型。該方法建模效率高、模型精簡(jiǎn)且能滿足控制器仿真測(cè)試需求,特別適用于實(shí)時(shí)仿真。因現(xiàn)有實(shí)車(chē)數(shù)據(jù)限制,各子系統(tǒng)模塊精細(xì)度尚待深度優(yōu)化,后續(xù)在條件具備的情況下計(jì)劃采集更多工況的實(shí)車(chē)數(shù)據(jù)對(duì)映射關(guān)系模型進(jìn)行進(jìn)一步細(xì)化和擴(kuò)展以提高整車(chē)仿真模型的準(zhǔn)確度。
參考文獻(xiàn):
[1]趙祥模,承靖鈞,徐志剛,王文威,王潤(rùn)民,王冠群,朱宇,汪貴平,周豫,陳南峰.基于整車(chē)在環(huán)仿真的自動(dòng)駕駛汽車(chē)室內(nèi)快速測(cè)試平臺(tái)[J].中國(guó)公路學(xué)報(bào),2019(6):124-136.
[2]邵建,郭建軍,周偉,路中達(dá).車(chē)輛系統(tǒng)級(jí)特性建模和整車(chē)動(dòng)力學(xué)仿真[C].中國(guó)汽車(chē)工程學(xué)會(huì)年會(huì)論文集,2014:1075-1078.
[3]裴學(xué)杰.基于Carsim的整車(chē)模型的建立和仿真分析[J].輕工科技,2016(8):59-60.
[4]何焜.特種車(chē)輛整車(chē)建模與動(dòng)力學(xué)仿真[D].南京理工大學(xué),2005.
[5]李剛.車(chē)輛模型轉(zhuǎn)向盤(pán)角階躍輸入運(yùn)動(dòng)的仿真研究[D].大連理工大學(xué),2004.