國內(nèi)外木薯機械化種收裝備研究現(xiàn)狀與展望
2022-05-27 06:16:24陳林濤牟向偉薛俊祥彭柱菁劉文杰
農(nóng)業(yè)工程 2022年2期
陳林濤,牟向偉,薛俊祥,彭柱菁,劉文杰
(廣西師范大學職業(yè)技術(shù)師范學院,廣西 桂林 541004)
0 引言
木薯也稱樹薯,呈灌木狀,莖稈直立,木質(zhì),高2~5 m,莖稈下有塊狀根,塊根富含纖維和淀粉。木薯種植成本低、產(chǎn)量高,其塊根、莖、葉均可食用,也可加工淀粉、酒精和有機化學品等多個品種的產(chǎn)品,廣泛用于食品醫(yī)藥和輕工業(yè)[1]。木薯作為加工燃料乙醇的原料,是目前重要的可再生生物質(zhì)能源作物。木薯種植對保障糧食安全和緩解能源供求矛盾具有重要的現(xiàn)實意義[2]。農(nóng)業(yè)農(nóng)村部在《全國熱作產(chǎn)業(yè)發(fā)展第十二個五年規(guī)劃》中提出,到2015年木薯種植面積達66.7萬hm2以上,鮮薯年產(chǎn)量達到2 000萬t以上[3-4]。我國木薯主要種植在廣西、廣東和海南,云南、福建等省也有種植。目前,我國木薯生產(chǎn)不能滿足需求,已成為木薯進口大國,僅廣西每年從東盟國家進口的鮮薯原料約550萬t,外貿(mào)依存度達50%[5-6]。木薯種植對于促進主產(chǎn)省區(qū)的經(jīng)濟發(fā)展和農(nóng)民增收有重要的現(xiàn)實意義。但由于木薯種植和收獲分散、機械化程度低等導致生產(chǎn)效益低下,農(nóng)民種植意愿不高,全國木薯種植面積和產(chǎn)量一直徘徊不前。究其原因,木薯生產(chǎn)機械化程度低是制約我國木薯產(chǎn)業(yè)發(fā)展的瓶頸之一。據(jù)統(tǒng)計,種植與收獲環(huán)節(jié)的勞動量分別約占整個生產(chǎn)勞動量的20%和60%,種植機械和收獲機械是木薯生產(chǎn)機械化發(fā)展需要解決的兩大技術(shù)難題[7]。國家各類項目資金支持開展了木薯收獲機械研究,取得較大進展,但對木薯種植機械研究沒有給予足夠重視,目前處于起步階段,國內(nèi)還沒有技術(shù)成熟、可推廣的木薯種植機。
鑒于木薯生產(chǎn)實現(xiàn)機械化的迫切需要,本文重點闡述木薯種植和收獲現(xiàn)有機械裝備及其關鍵部件研究現(xiàn)狀,并對木薯種植機與收獲機進一步研究做出展望。
1 木薯種植與收獲的農(nóng)藝要求
1.1 種植
木薯以莖稈為種進行繁殖,莖稈的平均直徑為30 mm左右,種莖的切段長度為150 mm左右。通常情況下開溝種植,溝深約120 mm、溝寬約150 mm,木薯種可平放、直插或斜插埋入溝中,施肥后,覆土壓實,覆土厚約120 mm。無特殊要求的情況,一般采用平放形式,對于木薯塊根的產(chǎn)量和莖稈抗倒伏性能具有較好的影響。種植株距500~1 000 mm,行距800~1 200 mm。切段的木薯種莖切口邊緣有芽,應減少或避免種莖碰撞,提高發(fā)芽率,木薯實物如圖1所示。


圖1 木薯實物Fig.1 Physical map of cassava
1.2 收獲
處于成熟期的木薯葉色稍黃,且基部葉片大部分脫落,木薯塊根外皮呈深色,塊根粗大且入土較深。機械化收獲作業(yè)前先砍去莖稈,利用挖拔裝置松土,并將木薯塊根與泥土分離進行收集,收獲需保持木薯塊根表皮完整性,減少木薯脆斷、粘土現(xiàn)象[8]。目前木薯收獲主要由人工挖收或用簡易挖掘機械挖掘后人工揀拾,其勞動強度高、效率低、收獲損失率高,采用的機械挖掘收獲工作部件阻力大、能耗高,根土分離效果差、破損率高,致使木薯品質(zhì)低,經(jīng)濟效益差,木薯發(fā)展擴大的關鍵是實現(xiàn)高效、可靠的收獲機械化[9]。
2 木薯種植機械化研究現(xiàn)狀
目前采用切段莖稈作為種子的種植機械主要有實時切種式和預先切種式2種機型。實時切種式機型需配備專門人工將莖稈喂入切段刀內(nèi),切成段后自由落入種溝,勞動強度大且喂入不連續(xù),易造成傷種、漏種。現(xiàn)有木薯種植機均采用此形式,難以滿足種植要求。預先切種式機型將預先切成段的種莖放入種箱,通過排種裝置實現(xiàn)排種,降低人工勞動強度,提高效率,但存在一些待解決的關鍵問題,需進行機理分析和結(jié)構(gòu)創(chuàng)新,降低種莖損傷率和漏種率。木薯種植機械尚未開發(fā)預先切種式自動排種機型。
2.1 國外研究現(xiàn)狀
巴西、墨西哥、尼日利亞和馬來西亞等國先后研制了不同型號的單行、雙行或多行種植機,均為實時切種式,須有多名工人輔助喂入莖稈,如圖2a所示。泰國Lungkapin開發(fā)了一種木薯莖稈切割裝置,優(yōu)化了切種結(jié)構(gòu)和運動參數(shù),提高切種效率,降低破損率,由圓盤鋸、底板、電機構(gòu)成,如圖2b所示[10]。工作時將木薯莖稈喂入料槽,在底板被圓盤鋸切斷,凸輪機構(gòu)控制切割次數(shù),并在該部件基礎上又研制木薯種植機,但同樣也需要工人輔助作業(yè)[11]。

圖2 國外木薯種植機Fig.2 Foreign cassava planter
2.2 國內(nèi)研究現(xiàn)狀
我國木薯種植機械研究處于起步與試驗階段,缺乏相應的研究成果,主要采取引進與消化吸收的研究方法。廣西農(nóng)科院等單位先后開發(fā)出了2CMS-2型木薯聯(lián)合種植機和2BMSU/2X型旋切開溝式木薯播種機,國產(chǎn)機型也是由人工輔助輸送莖稈,切斷的種莖自由落入種溝擺放[3-4]。

2.2.1 2CMS-2型木薯聯(lián)合種植機
2CMS-2型木薯聯(lián)合種植機主要包括機架、切種部件、施肥部件、開溝部件、地輪部件和培土部件,如圖3所示。切種部件(圖4)采用雙輥輸送切段的結(jié)構(gòu),每個切段輥均裝4把刀片,輸送輥每轉(zhuǎn)一圈輸送的種莖桿被切斷成4段。2CMS-2型木薯聯(lián)合種植機傳動原理如圖5所示,拖拉機行走速度變化時,地輪轉(zhuǎn)速也隨之變化。
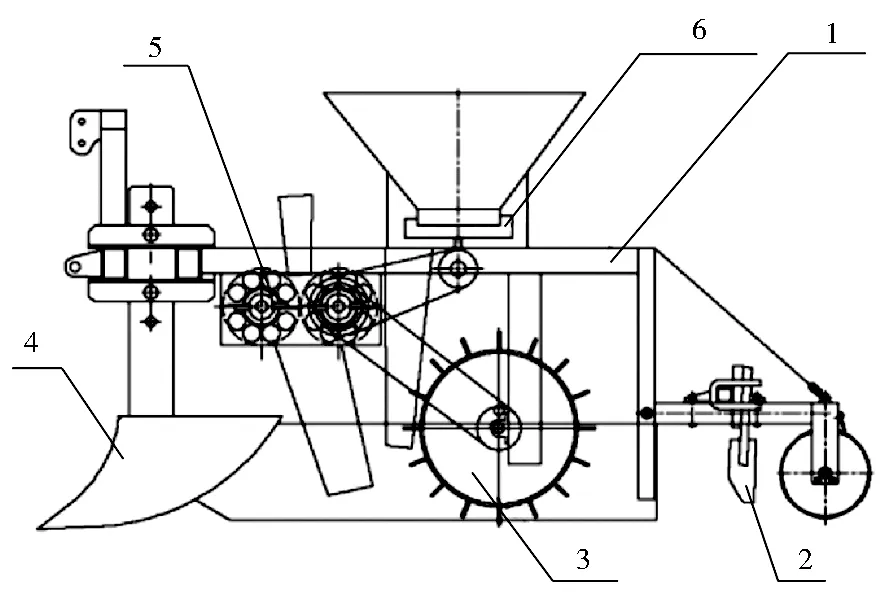
1.機架 2.培土部件 3.地輪部件 4.開溝部件 5.切種部件 6.施肥部件圖3 2CMS-2型木薯聯(lián)合種植機結(jié)構(gòu)Fig.3 Structure of 2CMS-2 cassava combine planter

1.空心膠管 2.刀片圖4 切種部件Fig.4 Seed cutting part

圖5 2CMS-2型木薯聯(lián)合種植機傳動原理Fig.5 Transmission principle of 2CMS-2 cassava combine planter
2.2.2 2BMSU/2X型旋切開溝式木薯播種機
2BMSU/2X型旋切開溝式木薯播種機,是通過點株對應的壟溝切削泥土被快速拋出,切段種莖能夠迅速進入種溝,進而提高播種效率,整機傳動如圖6所示。木薯播種裝置中排肥器的工作原理為螺旋推桿式,施肥量大小由切斷器至排肥器的傳動比設定,切換它們的塔式鏈輪組可改變施肥量。而集堆點播器收集從排肥器輸送下來的肥料定量,按照固定的株距節(jié)拍,間歇打開閥門,把肥料呈堆狀點播在種溝內(nèi)的木薯種莖之間。V形壟溝旋挖機構(gòu),由齒輪箱變速并帶動呈V形布置的旋切刀盤反轉(zhuǎn),切削泥土并高速拋出壟溝,開挖出平整的V形壟溝。試驗證明,旋切刀盤與拖拉機輪胎的轉(zhuǎn)向相反時,切削效率更高且減少動力消耗。將泥土向前拋送,大大減少壟溝的回土現(xiàn)象,壟溝外形平整,不易坍塌。

1.肥料箱 2.排肥器變速鏈輪 3.集堆點播器 4.點播器鏈輪5.鏈條 6.切斷器齒輪副 7.點播器主動鏈輪 8.排肥器主動鏈輪 9.切斷器從動鏈輪 10.切斷器 11.鏈條 12.地輪主動鏈輪 13.浮動獨輪式播種地輪組件 14.鏈條 15.切斷器主動鏈輪 16.地輪從動鏈輪 17.鏈條圖6 地輪驅(qū)動系統(tǒng)Fig.6 Ground wheel drive system
2.3 總結(jié)
國內(nèi)外木薯種植機械研究集中在實時切種式種植機整機設計和性能優(yōu)化方面,均采用人工輔助喂種及粗放式直接排種方式。人工長時間重復勞動導致體力和效率下降跟不上整機節(jié)奏及直接排種不穩(wěn)定是造成排種不均勻的主要原因,實時切種直接排種方式不能達到種植技術(shù)要求,限制其推廣應用。因此,應改變種植機排種方式,采用預先切種自動排種式,將預先切好的種莖放入種箱,通過供種、調(diào)姿、控種和排種等機構(gòu)對種莖進行分離、調(diào)姿、排序和種量控制,自動實現(xiàn)連續(xù)、精確、可控地排種,才能根本改善機械種植質(zhì)量,提高均勻性。種莖完全依靠機械結(jié)構(gòu)和運動實現(xiàn)自動有序排種,需要對木薯種莖的材料力學特性、運動特性和碰撞特性等基本性質(zhì)展開研究。
3 木薯收獲機械化研究現(xiàn)狀
3.1 國外研究現(xiàn)狀
從20世紀40年代開始根莖類作物收獲機械研究,美國、日本、法國和意大利等發(fā)達國家均研制出不同功能的收獲機械。現(xiàn)已實現(xiàn)對淺根莖作物(如蘿卜、甜菜、馬鈴薯等)的機械化收獲。意大利的DSC-120型和日本久保田公司生產(chǎn)的DCL-130型馬鈴薯挖掘機。美國Courtesy of Lilli ston Mfg.Co.生產(chǎn)的LP-2型花生收獲機和荷蘭Michigan生產(chǎn)的PH-2型花生收獲機,2002年美國Kelley Manufacturing公司在KMC3376型和KMC3374型的基礎上研制出的新型花生聯(lián)合收獲機,是目前花生兩段收獲方式下的較先進的聯(lián)合收獲機械,這些機型技術(shù)先進、工作可靠性高,但是結(jié)構(gòu)較復雜[12-13]。美國、加拿大、日本等國學者早期對振動耕作部件的耕作阻力進行了系統(tǒng)研究,指出采用合適振動頻率、振幅及振動方向角可減少牽引阻力10%~30%[14-15]。關于木薯機械化收獲,歐美等國家種植較少,沒有對木薯收獲機進行系統(tǒng)研究,因而少有報道。木薯生產(chǎn)機械化程度較高的是巴西,針對木薯收獲機械,根據(jù)挖掘原理可分為挖掘式、拔式、挖拔結(jié)合式和挖掘-升運鏈抖動分離式等。挖掘式木薯收獲機械代表機型有巴西Planti center公司生產(chǎn)的P-900型雙行木薯塊根收獲機(圖7)和IKEDA公司生產(chǎn)的SMDP 2 LM型木薯塊根收獲機(圖8);挖掘-升運鏈抖動分離式的代表機型有巴西HENNIPMAN公司生產(chǎn)的WH15-2L型木薯塊根收獲機(圖9)[16]。木薯聯(lián)合收獲機在國外有一定的研究,并得到應用,代表機型有巴西MIAC公司生產(chǎn)的Maniva 2LR型木薯聯(lián)合收獲機,工作時夾持鏈直接拔起雙行木薯,設有薯莖自動分離裝置,可在夾持輸送過程中自動分切木薯,木薯塊根通過傳送帶輸送至機器后方裝袋,如圖10所示[17]。

圖7 P-900型雙行木薯塊根收獲機Fig.7 P-900 double row cassava root tuber harvester

圖8 IKEDA公司生產(chǎn)的SMDP 2 LM型木薯塊根收獲機Fig.8 SMDP 2 LM cassava root tuber harvester produced by IKEDA company

圖9 WH15-2L型木薯收獲機Fig.9 WH15-2L cassava harvester

圖10 Maniva 2LR型木薯聯(lián)合收獲機Fig.10 Maniva 2LR cassava combine harvester
3.2 國內(nèi)研究現(xiàn)狀
我國木薯種植地塊較散亂,機具多采用3點懸掛式作業(yè),作業(yè)環(huán)境復雜。當機具在土壤黏重、雜草多或斷稈覆蓋率高的地塊作業(yè)時,易產(chǎn)生雜草及斷稈纏繞或壅堵、阻力大、挖深不夠和收獲損傷大等問題,國外成熟機型多無法適用于我國木薯的實際種植情況[18]。從20世紀60年代開始,我國引進國外根莖類挖掘機械,主要用于花生、薯類等淺根莖作物收獲。隨后開展了根莖類作物收獲機械的研究,趙運生等[19]對馬鈴薯挖掘機的升運鏈與擺動篩組合式機構(gòu)進行研究,設計組合式挖掘鏟與鉤桿式升運隨動抖動器,效果良好。馬寧等[20]對擺動式花生收獲裝置的原理進行了系統(tǒng)研究,通過建模與優(yōu)化得到了結(jié)構(gòu)與運動參數(shù)的最優(yōu)組合。屈哲等[21]對馬鈴薯收獲機擺動篩與塊莖運動仿真進行分析,給出不同的擺動篩、擺動頻率、擺幅的輸送效果。針對木薯收獲,挖掘式收獲機是使用挖掘鏟破壞薯塊與土壤的連接,然后由人工進行撿拾、分切和裝袋等作業(yè)。該類機型結(jié)構(gòu)簡單,制造成本低,機器適應性好,在我國使用較為廣泛。其中,代表機型為中國熱帶農(nóng)業(yè)科學院農(nóng)業(yè)機械研究所研制的4UMS-390Ⅱ/4UMS-900/4UMS-1800型木薯收獲機[22]。
從20世紀80年代開始深根莖作物挖掘機械的研究,先后開發(fā)出適用于根莖收獲的機型[23]。黑龍江省水利科學研究院研制的4WZ-140型根莖收獲機,包括可產(chǎn)生振動的主機體和切割鏟,作業(yè)時主機體產(chǎn)生的振動力可使牽引阻力降低20%以上[24]。吉林省白城市農(nóng)機研究院研制了4GKJ-11型根塊莖收獲機[25]。山西省長治市農(nóng)機試驗站研制了4SD-280型振動式根莖收獲機[26]。遼寧省農(nóng)業(yè)機械化研究所研制的深根作物根莖挖掘機,挖掘鏟邊走邊振動,把作物根周圍土壤振動松散并托起,使扎根較深的植物根輕松而不受損傷地完整拔出[27]。陳學深等[28]進行深根中藥材聯(lián)合收獲機研究,采用雙重振動挖掘機構(gòu)、柔性雙棘輥與柵條鏈輸送系統(tǒng)、旋轉(zhuǎn)彈性網(wǎng)、仿生柔性打擊錘和振動篩分離機構(gòu)等,使工作阻力明顯降低,輸送效果有效改善、分離損失明顯降低。國內(nèi)有多個企業(yè)生產(chǎn)挖掘-升運鏈式木薯收獲機,該機型主要由機架、挖掘部件和桿鏈式土薯分離部件構(gòu)成,有升運鏈振動式和升運鏈不振動式兩種機型,振動升運鏈式機型分離效果更好[29]。該類機型有河南坤達農(nóng)業(yè)機械設備有限公司生產(chǎn)的4U-160型木薯收獲機,廣西水力機械所研制的LW-602型雙行木薯收獲機(圖11)[30-31]。但由于我國木薯種植地塊小,地形崎嶇,大型聯(lián)合收獲機作業(yè)困難,目前國內(nèi)沒有木薯聯(lián)合收獲機型得到應用。

圖11 LW-602型雙行木薯收獲機Fig.11 LW-602 double row cassava harvester
3.3 總結(jié)
目前國內(nèi)外有多家單位開展根莖類作物收獲技術(shù)與裝備的研究,并在大田作物,如蘿卜、馬鈴薯、花生等淺根莖類作物的收獲機械化取得進展。但木薯作物形狀、性質(zhì)、抗拉扭強度差異較大,因此挖掘和分離的難度大,要根據(jù)其生長習性采用合適的挖掘與分離方式。現(xiàn)有的木薯挖掘收獲機械存在的主要問題:挖掘阻力大、功耗高;輸送與根土分離過程木薯損傷率高,分離效果差;大多數(shù)機具功能單一,主要由人工撿拾,生產(chǎn)率低;主要的工作部件都是由傳統(tǒng)的農(nóng)具改裝而來,缺少系統(tǒng)的工作原理、關鍵部件理論與試驗研究[32-36]。
4 展望
目前木薯機械化種植、收獲機仍屬于研發(fā)示范階段,在種收機械化技術(shù)方面還面臨著許多問題,還需要在關鍵技術(shù)上作進一步研究。
(1)因地制宜確立不同地區(qū)最佳木薯收獲方式和技術(shù)路線,有針對性地進行木薯收獲機技術(shù)研發(fā)和推廣。農(nóng)機農(nóng)藝結(jié)合建立規(guī)范化區(qū)域木薯種植技術(shù)體系,加強種植標準化推廣和規(guī)模化種植,采用現(xiàn)代化標準農(nóng)業(yè)生產(chǎn)模式,優(yōu)化并形成區(qū)域規(guī)范的木薯生產(chǎn)技術(shù)體系,農(nóng)藝與農(nóng)機相互適應,相互融合,促進木薯產(chǎn)業(yè)發(fā)展[37-38]。
(2)在種植機械化方面,重點針對自動排種關鍵部件進行機理研究與機構(gòu)創(chuàng)新,采用預先切種式自動排種的技術(shù)方案,創(chuàng)新設計供種機構(gòu)、種莖姿態(tài)調(diào)整機構(gòu)、種量控制機構(gòu)和排種機構(gòu)等關鍵結(jié)構(gòu),確定優(yōu)化的排種方式、作用機理和結(jié)構(gòu)形式,在排種關鍵部件作用下自動、連續(xù)完成對預先切段木薯種莖的均勻、精量和固定姿態(tài)的排種目標,提高木薯種植效率、排種均勻性和精確性,取代人工輔助喂種,降低勞動強度。進一步發(fā)展的關鍵點是發(fā)展木薯種莖在機械結(jié)構(gòu)和運動限制下的流動特性、運動規(guī)律、接觸碰撞力學關系和碰撞破壞理論與分析方法;提出對木薯種莖進行運動軌跡干預、姿態(tài)調(diào)整、順序排列和數(shù)量控制的機理分析方法與結(jié)構(gòu)設計理論。
(3)在收獲裝備研究方面,圍繞現(xiàn)有收獲機存在斷薯現(xiàn)象嚴重、漏收率高、在黏重、干硬土壤入土困難和分離效果差等問題開展工作,采用機構(gòu)學、散粒體力學、多剛體力學和試驗優(yōu)化設計等理論方法展開研究工作,結(jié)合離散元法及先進的計算機軟件等現(xiàn)代分析與試驗測試手段,研究木薯收獲裝備振動挖掘、柔性輸送和旋轉(zhuǎn)分離的工作過程,揭示挖掘、輸送和分離的規(guī)律,提出高效收獲機構(gòu)的設計方法,最終實現(xiàn)木薯機械化高效收獲作業(yè)[39]。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
科技傳播(2019年22期)2020-01-14 03:06:54
電腦報(2019年40期)2019-09-10 07:22:44
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
汽車工程學報(2017年2期)2017-07-05 08:13:02