基于擴展狀態觀測器的新型超螺旋滑模控制策略
2022-05-27 10:11:02金超杰
化工自動化及儀表 2022年2期
賈 超 金超杰
(天津理工大學電氣工程與自動化學院 天津市復雜系統控制理論及應用重點實驗室)
符 號 說 明
Ai1——液壓缸進油腔的活塞面積;Ai2——液壓缸排油腔的活塞面積;AL——變形抗力的作用點;a11——滑塊中心點位移速度的系數;a22——滑塊繞y軸偏轉的角速度的系數;a33——滑塊繞x軸偏轉的角速度的系數;B——控制分配的系數矩陣;b——粘性阻尼系數;C——負載力系數矩陣;Cdi——閥口流量系數;c——滑模面的斜率;c1——滑塊中心點位移的滑模面的斜率;c2——滑塊繞y軸的滑模面的斜率;c3——滑塊繞x軸的滑模面的斜率;D——重力系數矩陣;d——液壓缸四角作用點到滑塊中心點的距離;E——加速度矩陣的系數矩陣;Ey——等效體積彈性模量;e——位移的誤差;images/BZ_18_321_2838_355_2889.png——位移誤差的一階導數;e1——滑塊中心點的位移誤差;?
?images/BZ_18_1383_1551_1420_1610.png——滑塊中心點的位移誤差的一階導數;e2——滑塊繞y軸偏轉的角誤差;images/BZ_18_1383_1701_1420_1761.png——滑塊繞y軸偏轉的角誤差的一階導數;e3——滑塊繞x軸偏轉的角誤差;images/BZ_18_1383_1851_1420_1911.png——滑塊繞x軸偏轉的角誤差的一階導數;Fi——每個液壓缸提供的負載力,i=1,2,…,5;FL——工件所產生的變形抗力;f(x2)——與模型速度相關的函數;f(images/BZ_18_1327_2136_1361_2187.png(t))——與模型速度相關的已知函數;G——速度矩陣的系數矩陣;g——重力加速度;H——干擾估計誤差的上界;h1,h2——假設的干擾估計誤差形式;Jx——滑塊相對于x軸的轉動慣量;Jy——滑塊相對于y軸的轉動慣量;j01——中心位移虛擬控制器的標稱增益;j02——滑塊繞y軸的虛擬控制器的標稱增益;j03——滑塊繞x軸的虛擬控制器的標稱增益;j11——滑塊中心點位移的虛擬控制器的實際增益;j22——y軸調平的虛擬控制器的實際增益;j33——x軸調平的虛擬控制器的實際增益;
k1,k2——超螺旋滑模控制器的增益;k11,k12——uδSTA1控制器增益;k21,k22——uδSTA2控制器增益;k31,k32——uδSTA3控制器增益;l——負載力的作用點到滑塊中心點的距離;m——滑塊的質量;mi——每個液壓缸塞桿的質量;o——滑塊中心點的位置;P——正定對稱矩陣;pi1——各柱塞液壓缸進油腔的壓強,i=1,2,…,4;p·i1——各柱塞液壓缸進油腔壓強的一階導數,i=1,2,…,4;pi1——中心液壓缸進油腔的壓強,i=5;p·i1——中心液壓缸進油腔壓強的一階導數,i=5;pi2——中心液壓缸排油腔的壓強,i=5;p·i2——中心液壓缸排油腔壓強的一階導數,i=5;ps——液壓閥入口壓力;Q——對稱矩陣;s——滑模變量;s·——滑模面的導數;s1——滑塊中心點位移的滑模面;s·1——滑塊中心點位移滑模面的一階導數;s2——滑塊繞y軸的滑模面;s·2——滑塊繞y軸滑模面的一階導數;s3——滑塊繞x軸的滑模面;s·3——滑塊繞x軸滑模面的一階導數;sat(x)——飽和函數;sat1(s,δ)——飽和函數1;sat2(s,δ)——飽和函數2;sign(x)——符號函數;u——控制律;u(t)——控制輸入;uSTA——超螺旋滑模控制器;uδSTA——邊界層超螺旋滑模控制器;uδSTA1——第1個超螺旋滑模控制器 (針對滑塊中心點的位移跟蹤);uδSTA2——第2個超螺旋滑模控制器(針對y軸調平);uδSTA3——第3個超螺旋滑模控制器(針對x軸調平);V·——Lyapunov函數的導數;Vi1——進油腔的容積;Vi2——排油腔的容積;V(ξ)——Lyapunov函數;
?v——虛擬控制器矩陣;vid——對滑塊中心點的位移、y軸調平和x軸調平所設計的控制器,i=1,2,3;wi——觀測器的增益,wi>0,i=1,2,3;wis——滑塊中心點位移的觀測器的增益,wis>0,i=1,2,3;wix——x軸調平觀測器的增益,wix>0,i=1,2,3;wiy——y軸調平觀測器的增益,wiy>0,i=1,2,3;x1——模型的位移;x·1,x2——模型的速度;x·2——模型的加速度;x^2——速度的估計;x~2——速度的估計誤差;x^·2———速度估計的一階導數;xd——期望位移;x·d——期望速度;x¨d——期望加速度;xi1——每個液壓缸活塞桿的位移,i=1,2,…,5;x·i1——每個液壓缸活塞桿的速度,i=1,2,…,5;x¨i1——每個液壓缸活塞桿的加速度,i=1,2, …,5;xs——滑塊中心點的位移;x·s——滑塊中心點的速度;x¨s——滑塊中心點的加速度;xsd——滑塊中心點的期望位移;x·sd——滑塊中心點的期望速度;x¨sd——滑塊中心點的期望加速度;θxd——滑塊繞x軸期望偏轉的角;θ·xd——滑塊繞x軸期望偏轉的角速度;θ¨xd——滑塊繞x軸期望偏轉的角加速度;θyd——滑塊繞y軸期望偏轉的角;θ·yd——滑塊繞y軸期望偏轉的角速度;θ¨yd——滑塊繞y軸期望偏轉的角加速度;xz1——二階狀態方程后的滑塊中心點的位移;x·z1,xz2——二階狀態方程后的滑塊中心點的速度;x·z2——二階狀態方程后的滑塊中心點的加速度;x~z2——二階狀態方程后的滑塊中心點的速度估
計誤差;x^z2——二階狀態方程后的滑塊中心點速度的估計;x^·z 2——二階狀態方程后的滑塊中心點速度的估計的一階導數;xz4——二階狀態方程后的滑塊繞y軸偏轉的角速度,xz4=θ·y;xz6——二階狀態方程后的滑塊繞x軸偏轉的角速度,xz6=θ·x;y¨(t)——模型的加速度;α——l與x軸的夾角;β,β2,β3,β4——指數因子,為正數;δ——邊界層厚度;δ1——uδSTA1控制器邊界層厚度;δ2——uδSTA2控制器邊界層厚度;δ3——uδSTA3控制器邊界層厚度;ηi——各液壓缸的輸出驅動力;Θi——每個液壓閥的開度;θx——滑塊繞x軸偏轉的角度;θ·x——滑塊繞x軸偏轉的角速度;θy——滑塊繞y軸偏轉的角度;θ¨x——滑塊繞x軸偏轉的角加速度;θ·y——滑塊繞y軸偏轉的角速度;θ¨y——滑塊繞y軸偏轉的角加速度;τj——觀測器的增益,τj>0,j=1,2;τjs——滑塊中心點位移的觀測器的增益,τjs>0,j=1,2;τjx——x軸調平觀測器的增益,τjx>0,j=1,2;τjy——y軸調平觀測器的增益,τjy>0,j=1,2;ρ——油液密度;φ——控制輸入的實際增益;φ0——控制輸入的標稱增益;χ——超螺旋滑模控制器的中間變量;χ·——超螺旋滑模控制器中間變量的一階導數;χ——中間變量;χ·——中間變量的一階導數;ω1——滑塊中心點位移的外部干擾;ω2——滑塊繞y軸的外部干擾;ω3——滑塊繞x軸的外部干擾;ωL——集總擾動;
^ωL——觀測器的干擾估計;~ωL——集總擾動的干擾估計誤差;·ωL——集總擾動的一階導數;ωL1——滑塊中心點位移的集總擾動;^ωL1——滑塊中心點位移的觀測器的干擾估計;~ωL1——滑塊中心點位移的集總擾動的干擾估計誤差;^·ωL1——滑塊中心點位移的集總擾動估計的一階導數;^ωL2——滑塊繞y軸的觀測器的干擾估計;^ωL3——滑塊繞x軸的觀測器的干擾估計;ω(t)——非線性的外部干擾。?
電液伺服系統在航空航天、船舶控制等領域廣泛應用[1,2]。 作為生產鍛造產品的關鍵設備,液壓機的控制性能決定鍛造產品的質量。 文獻[3,4]將觀測器技術應用于液壓機控制,以提高它在外部擾動下的性能。 文獻[5,6]針對多缸液壓機的調平問題展開研究,將控制分配理論應用于控制器設計,但控制器結合的是一階滑模控制方法,其控制精度和調平速度有待改善。 文獻[7~9]中,將觀測器和超螺旋滑模控制器進行了組合控制,在車輛主動懸架系統、飛行器、位置跟蹤及消抖等方面取得了良好的控制效果,但采用的觀測器是高增益的,可能會導致峰化現象,造成惡化的瞬態性能。
在工業應用中, 擴展狀態觀測器(Extended State Observer,ESO)技術被廣泛關注,因為它可以同時實時估計內部不確定性 (參數或結構)和外部干擾,即使在沒有精確的系統數學模型的情況下, 也成功地應用于包括機電一體化系統、液壓系統、四旋翼飛行器及自動駕駛等領域,其中低增益的ESO可以緩解峰化問題[10]。
超螺旋滑模算法雖然是連續算法,但由于離散化和符號函數的存在,在實驗實現階段也確實存在抖振現象。 超螺旋滑模算法抖振幅度可能較低,但對于高精度調平的液壓機而言,控制信號的抖振仍然存在, 可能會激發系統的高頻特性,降低系統的調平精度和位置跟蹤能力。 為了解決這類抖振問題,Slotine J J和Sastry S S提出了邊界層的概念[11],該方法在邊界層外采用常規切換控制,在邊界層內采用連續反饋控制,可有效削弱抖振。 這些研究主要集中在傳統一階滑模控制上[12,13],對超螺旋滑模算法的邊界層研究很少[14]。
受文獻[14]的啟發,筆者以二階非線性系統為研究對象, 提出基于ESO的新型超螺旋滑模控制策略。 為實現高精度控制器設計,先提出一種非線性ESO, 通過將未知內部動態和外部干擾視為系統的擴展狀態來實時估計和補償它們的總影響。 非線性增益函數緩解了峰化問題,提高了觀測器性能。 之后,提出一種新型邊界層超螺旋滑模控制方法,在邊界層內使用兩種不同的飽和函數替代符號函數進一步消除抖振。 通過二次型Lyapunov函數證明所提組合控制器的穩定性。 最后,將控制策略在多缸液壓機上進行仿真應用。
1 系統模型
考慮以下具有未知動力學和外部干擾的二階非線性微分方程:

對于給定的二階系統(1),可以重寫為:
基本思想是首先獲得ωL的干擾估計,即,從而對系統的未知內部動態和外部擾動進行補償。
2 控制策略
在這一部分,針對具有一般形式的非線性動力學模型提出基于ESO的新型超螺旋滑模控制策略。
2.1 ESO設計

將ωL作為非線性系統的擴展狀態,參考文獻[10],ESO設計如下:
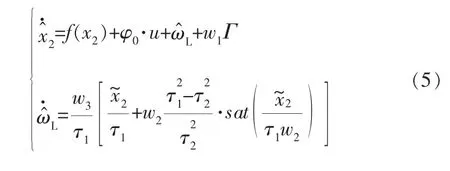
由文獻[10]可知,式(5)觀測器在t>t1(t1是觀測器的最小收斂時間)時收斂,且觀測器干擾估計誤差能收斂到足夠小的零鄰域,即O(τ2)量級:

2.2 改進超螺旋滑模算法
為了減輕穩態時的抖振現象,在控制律中使用并定義邊界層。 隨后為一般非線性系統設計組合控制器——ESO-超螺旋滑模控制器。
傳統超螺旋滑模算法如下:

針對系統(4),設計改進的邊界層超螺旋滑模算法(δSTA)如下:
其中,指數因子β≥1,增大β可以提高控制精度,因為邊界層厚度0<δ<1,所以增大β,s/δβ的值也會相應增大。
式(9)引入指數因子β是為了在保證飽和邊界層厚度δ不變的前提下提高控制精度。
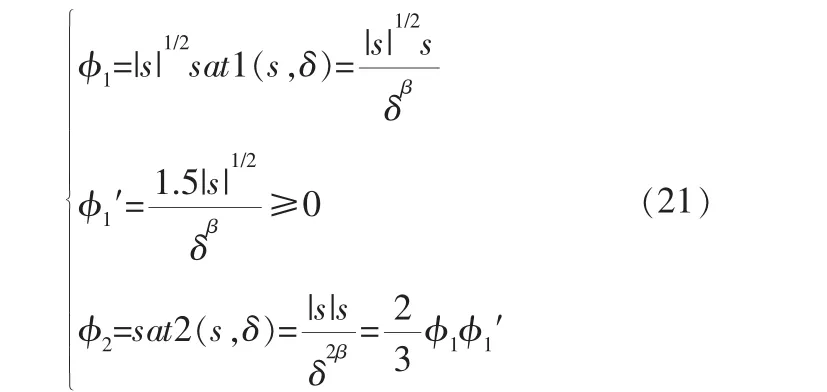
受文獻[14]啟發,第2個飽和函數可以通過以下方法得到。
令φ1=|s|1/2sat1(s,δ),對φ1求導可得φ1′,然后通過φ1φ1′得到sat2(s,δ):
2.3 組合控制器設計
控制器的設計是為了以超螺旋滑模控制器的形式獲得誤差跟蹤動態特性。 對于系統(4),首先設計滑模面s:

滑模面的導數為:
結合式(4),則式(12)變為:

考慮到式(5)的擴展狀態觀測器觀測到的集總擾動的估計^ωL和式(8)的超螺旋算法,設計控制輸入u的形式為:

將控制輸入u代入式(13),得到:
2.4 穩定性分析
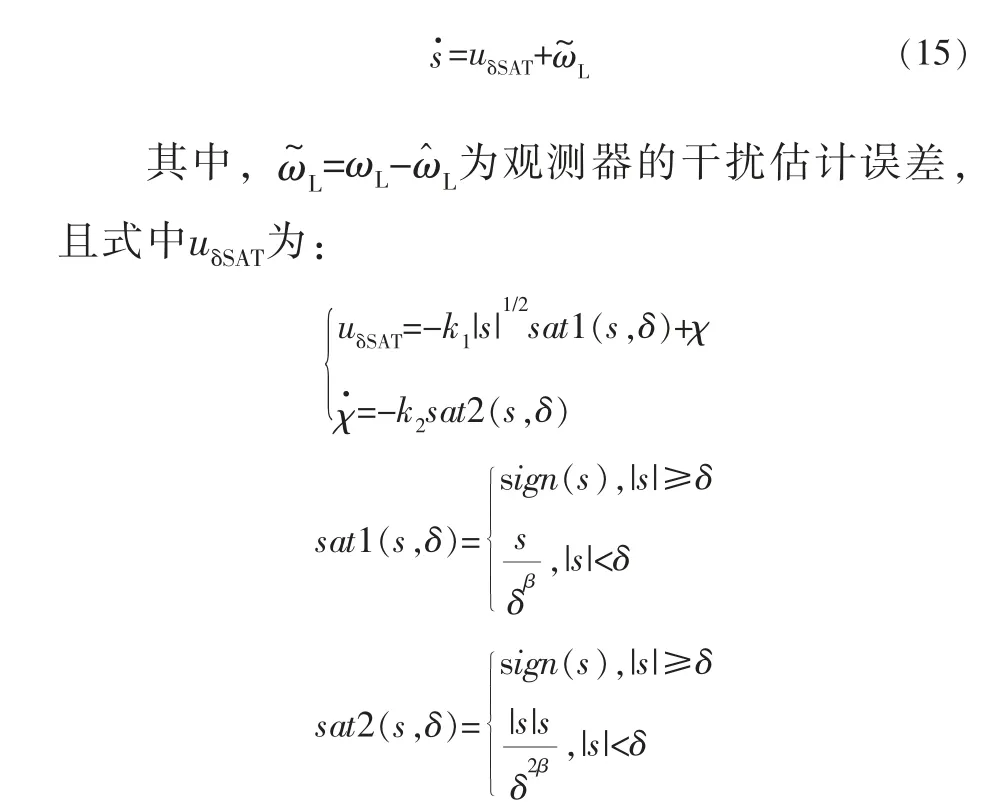
由文獻[10]可知,式(5)的ESO的干擾估計誤差能收斂到足夠小的零鄰域,假設式(15)中的集總擾動的干擾估計誤差可以改寫為:

假設1:

這意味著h1與滑動變量有關 (當s=0, 則h1=0),h2則是常數干擾,為h2的導數。設函數h有界,則有:

式(15)的超螺旋滑模控制器與傳統超螺旋滑模控制器在邊界層外的性能相同。
從而在邊界層外,當k1、k2滿足:
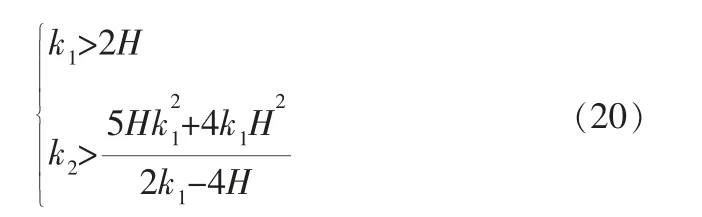
則動態系統(15)是穩定的,所有軌跡都會在有限時間內收斂[15,16]。
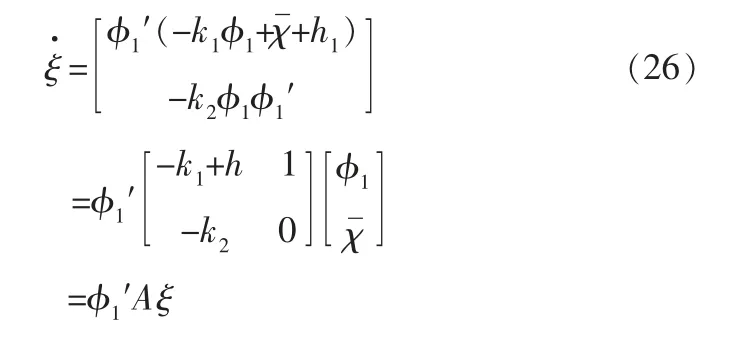
式(15)在邊界層內,即|s|<δ,有:
式(15)可重寫為:
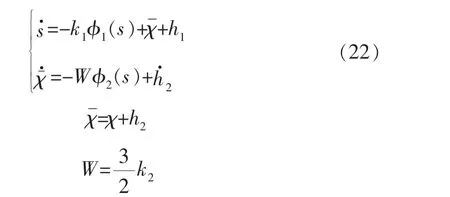
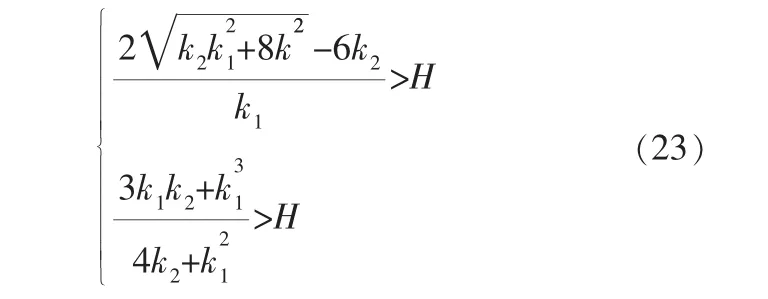
定理1 對于系統(22),如果增益k1、k2選擇滿足式(23),滑動面將達到s=0,=0,即有:
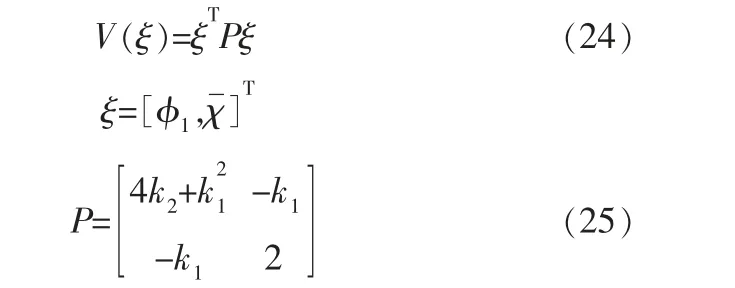
證明1 選擇以下二次型的Lyapunov函數:

對Lyapunov時間函數求導:
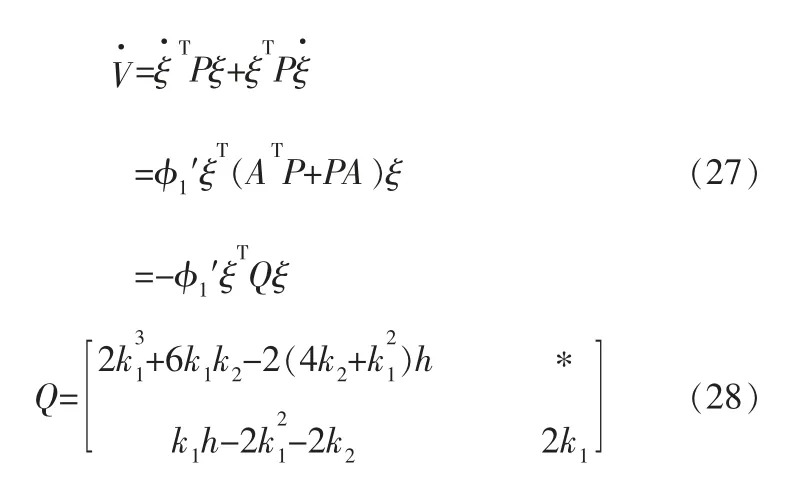
其中,*表示對稱元素。
實對稱矩陣正定的充要條件是它的特征值都是正的。可以發現,當k1和k2滿足式(23)時,Q是正定的。 這表明:

3 控制策略在多缸液壓機上的應用
3.1 多缸液壓機數學模型
本項目研究的液壓系統是一臺五缸液壓機[5],機械模型如圖1所示,滑塊部分的俯視圖如圖2所示。 它主要由位于中心位置的活塞液壓缸、位于四角的4個柱塞液壓缸和位于底部的滑塊組成。 每個液壓缸由獨立的比例伺服閥控制,每個液壓缸的力作用在滑塊上,滑塊鍛造工件。
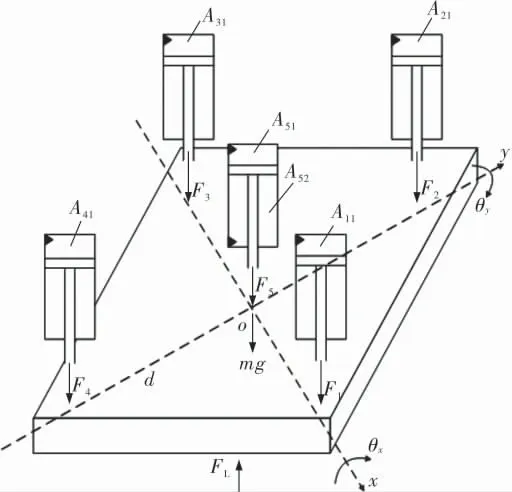
圖1 五缸液壓機模型示意圖

圖2 滑塊部分的俯視圖
控制的主要目的是使液壓系統能夠提供所需的鍛造力,并保持滑塊水平。
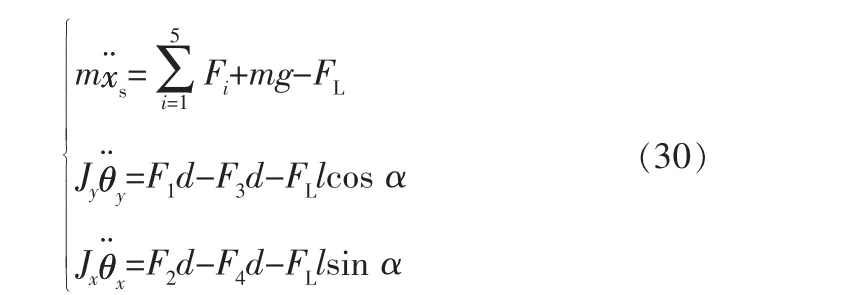
根據牛頓第二定律和角動量守恒定律可得以下動力學方程:
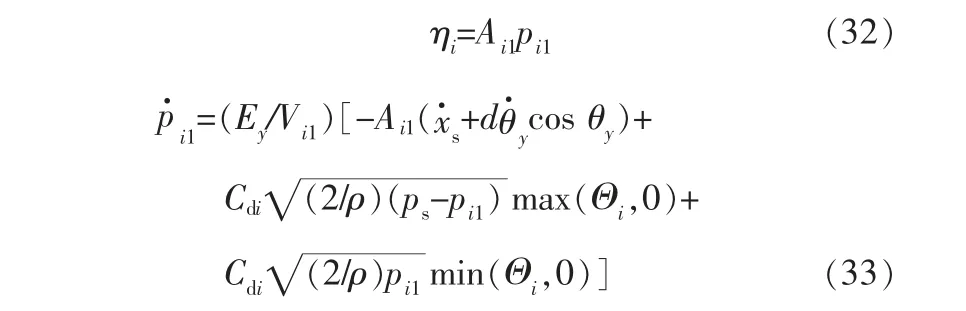
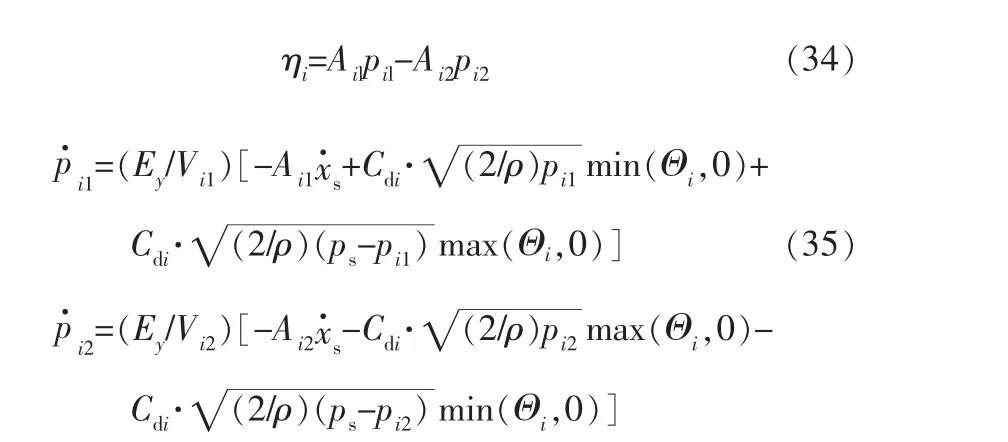
根據各液壓缸的負載力平衡方程,各液壓缸進油腔與排油腔的壓力動態特性如下:

當i=1,2,3,4時,有:
當i=5時,有:
通常θy和θx的轉動角度相對較小, 因此可設sin θy≈θy,sin θx≈θx。
位移計算式為:
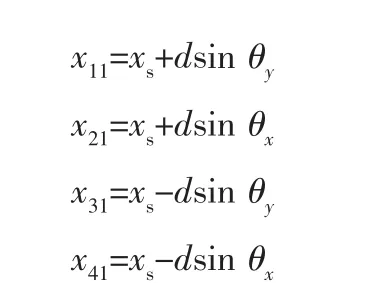

考慮到位移計算式和式(31),則式(30)可以展開為:

假設各液壓缸頂桿質量相同,則有:
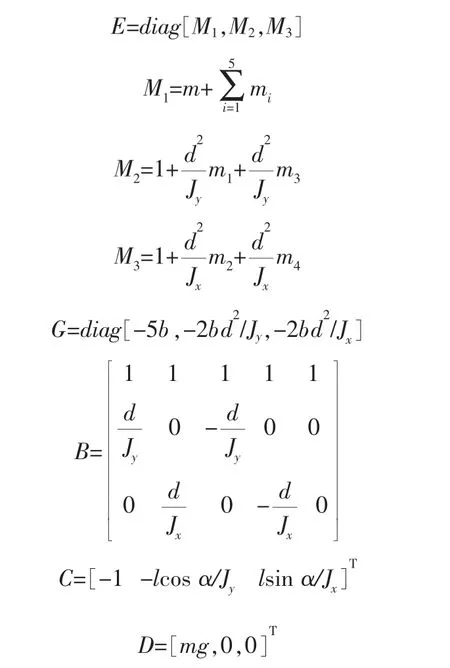
下面進行虛擬控制器設計。 對于滑塊而言,無論其上端面的液壓缸有多少,其運動的實質都是造成xs,θy,θx的變化。 假設滑塊上端面的多個液壓缸對于滑塊運動所造成的影響最終都等效為[v1d,v2d,v3d]T這3個虛擬的合力所產生的作用,因此先計算出所期望的3個虛擬控制量。 設v=[v1d,v2d,v3d]T=B[η1,η2,η3,η4,η5]T,其中v1d,v2d,v3d為等效后滑塊的虛擬控制輸入量。
由于E為可逆矩陣,將式(36)的左邊乘E-1后可得:
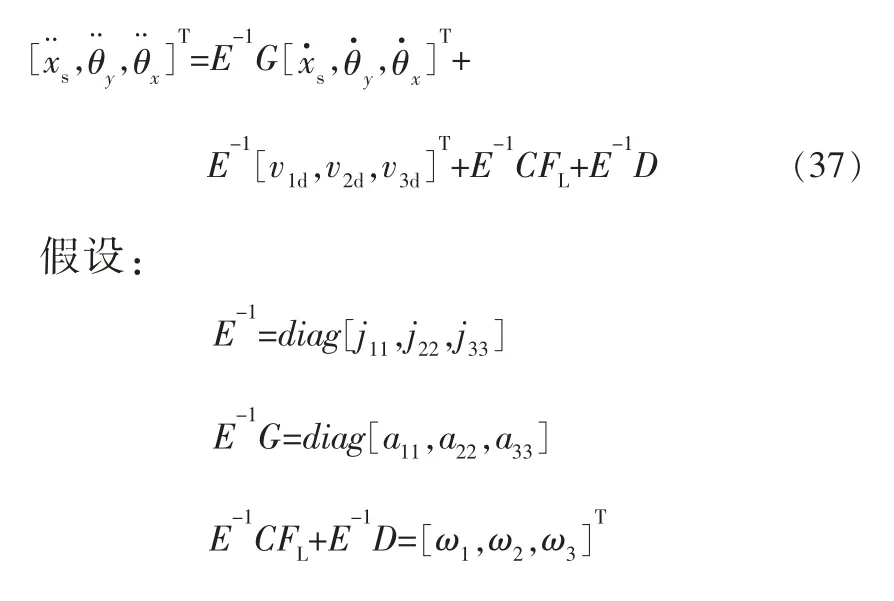
那么式(37)可以改寫為:
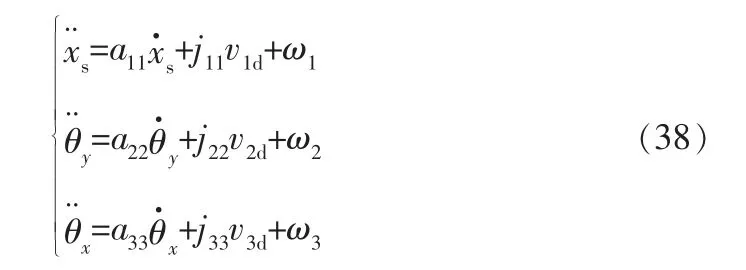
3.2 虛擬層設計
由式(38)可以看出,液壓機虛擬層的狀態方程與式(1)的原始系統形式相同,所以本節為多缸液壓機的虛擬層設計ESO-超螺旋滑模控制器組合控制方法,來獲得期望的虛擬量[v1d,v2d,v3d]T。

擴張狀態觀測器設計為:
采用超螺旋滑模控制器設計期望的滑模控制律v1d,設:

滑模面為:

滑模面的時間導數為:
結合式(39),式(43)變為:
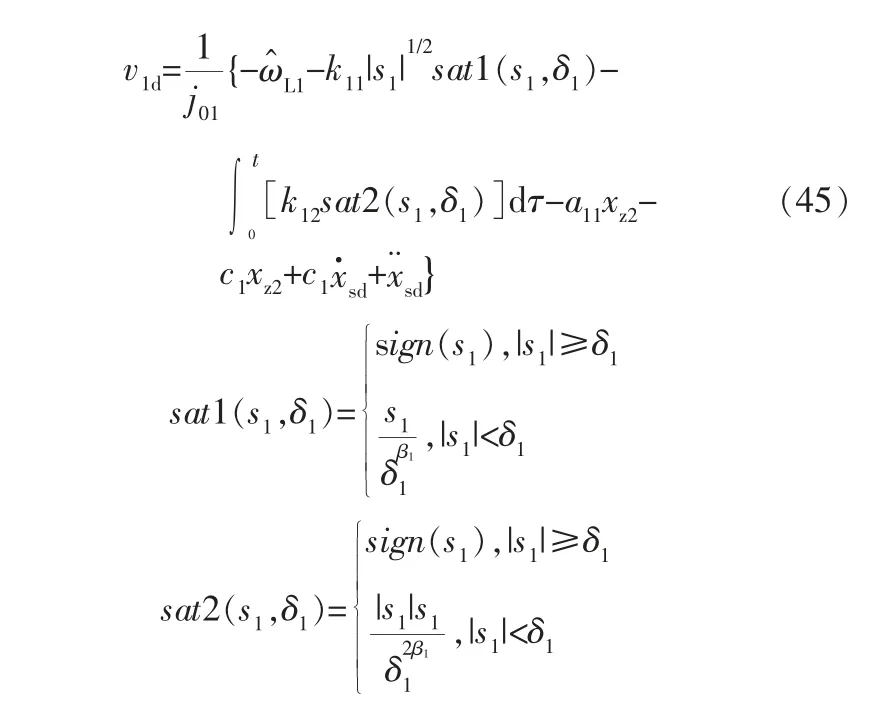
同理可得為實現θy和θx位置跟蹤所設計的虛擬控制輸入量v2d和v3d的期望值表達式:
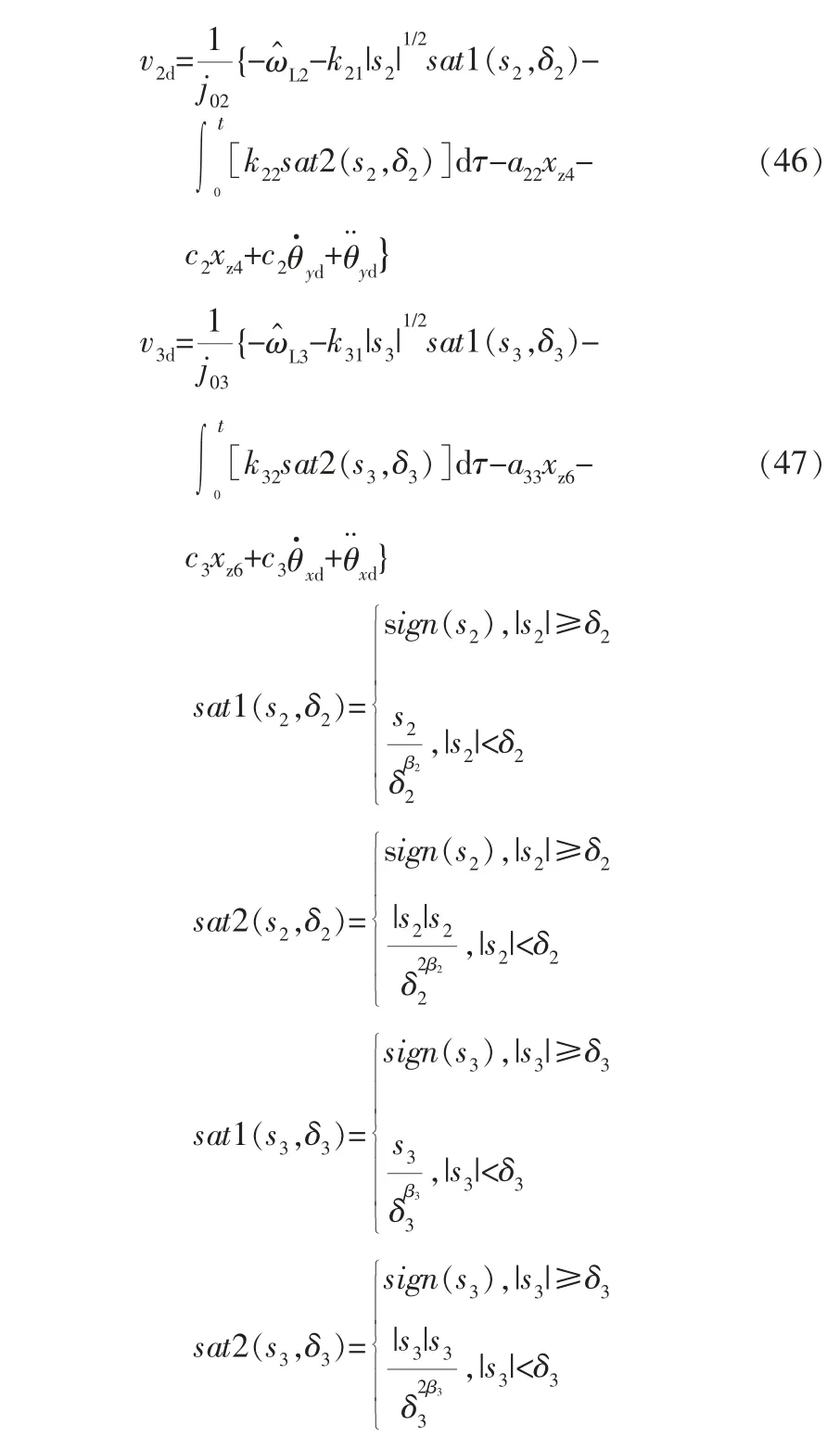
關于多缸液壓機的控制分配和最終控制律設計過程在文獻[5]中有詳述,此處不再贅述。
4 仿真實驗
以某2×104t液壓機的實際參數為例,對設計的控制器性能進行仿真實驗,驗證所提方法的位置跟蹤和調平能力。 控制目標設置為:xsd為斜坡函數(斜率1×10-2,即下降速度),并且滑塊應盡可能保持在調平狀態(即θyd=0,θxd=0),調平精度為0.1 mm/m(即|θy|≤10-4,|θx|≤10-4)。
為了驗證所提方法的優越性,與文獻[5]的一階積分滑模進行對比,液壓機的模型參數與文獻[5]一致,見表1。
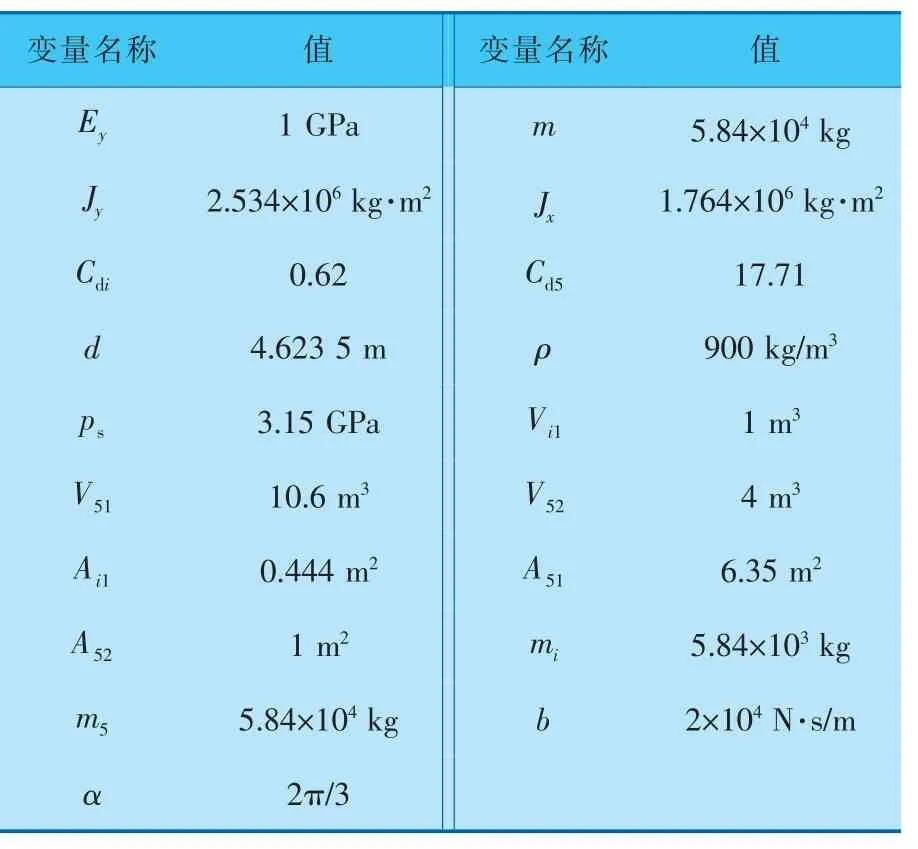
表1 液壓機的模型參數
設各液壓缸進油腔與排油腔的初始壓力皆為100 kPa,其余初始狀態均為0;且FL為一可變負載,其初始值為0,當中心點位移下降位置達到0.010 m時FL達到最大值200 MN并在之后一直保持在最大值,FL作用在滑塊下端面l=0.2 m,α=2π/3的位置上。此外,4個柱塞缸輸出力的取值范圍為0~14 MN,活塞液壓缸的輸出范圍為-200~200 MN。
筆者所提算法的控制參數取值見表2。
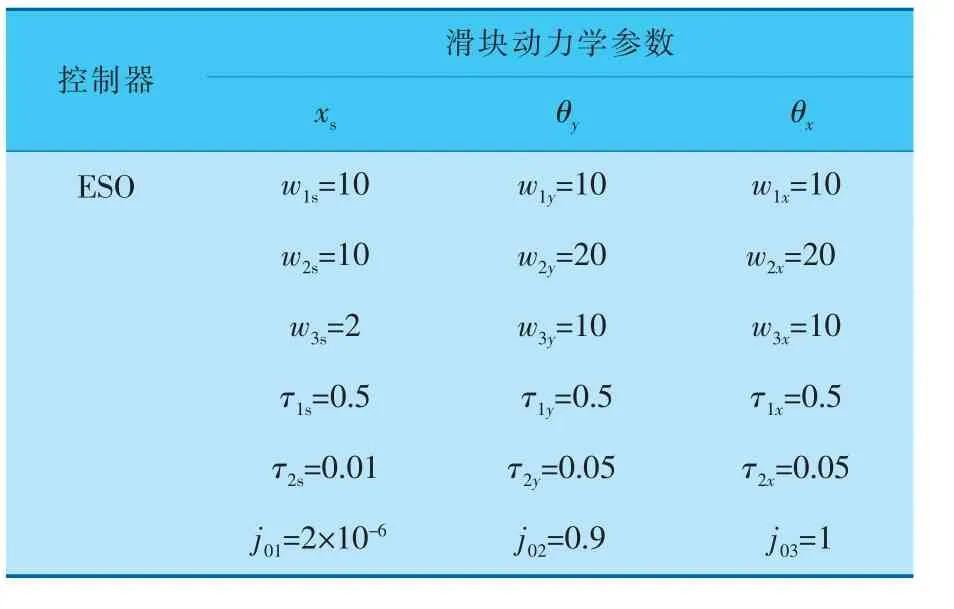
表2 兩種控制器在不同滑塊動力學參數下的控制參數
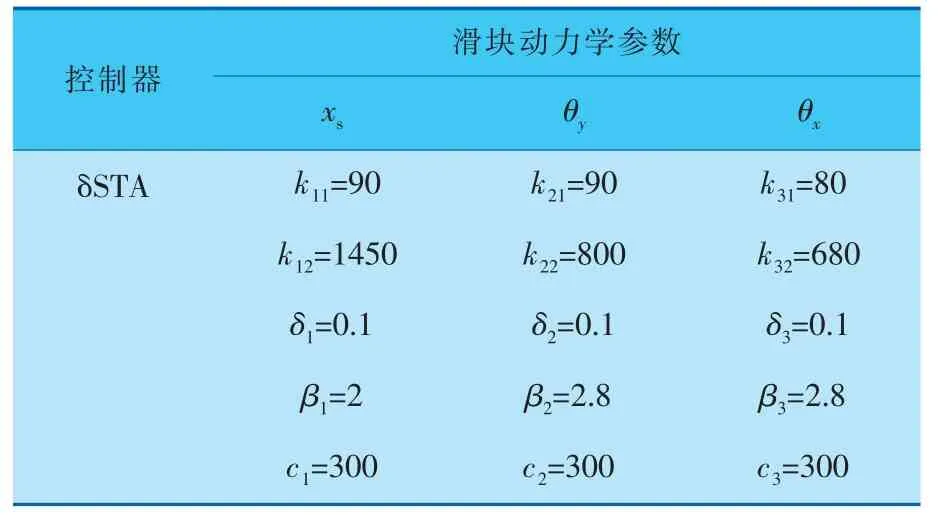
(續表2)
中心位置跟蹤響應曲線如圖3所示, 可以看出,此時筆者方法與文獻[5]2種方法都能實現超低速的位置跟蹤。
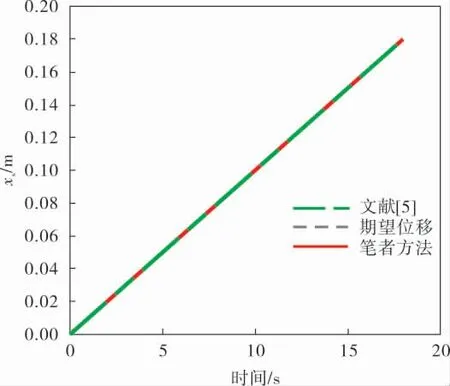
圖3 中心位置跟蹤響應曲線
從圖4、5和表3可以看出,筆者算法的超調量更小,且液壓機超調后收斂速度更快。
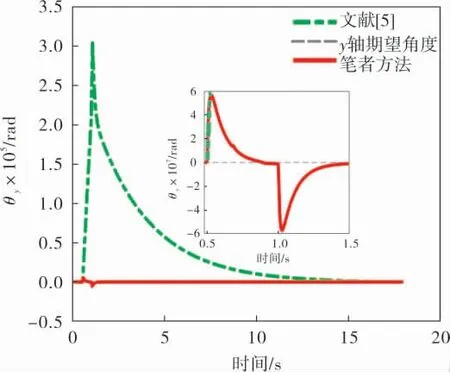
圖4 y軸的調平曲線
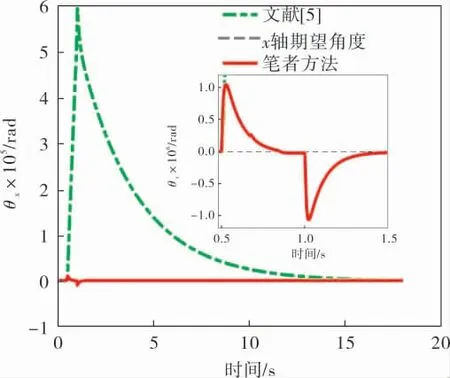
圖5 x軸的調平曲線
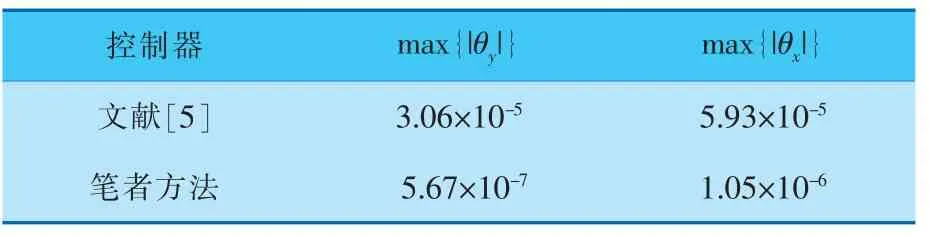
表3 超調量rad
定義Δ1=x11-x31,Δ2=x21-x41為調平精度。 圖6表明,筆者方法的調平精度優于文獻[5]的方法。

圖6 調平精度變化
圖7表明,筆者所提控制器的輸入是光滑的,沒有明顯抖振。
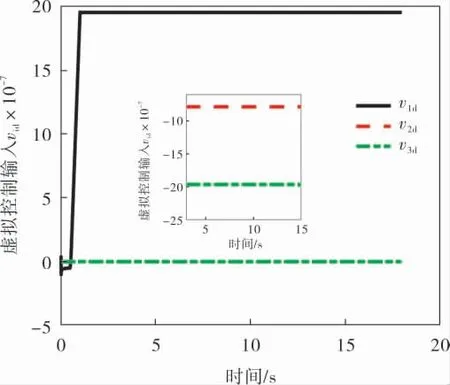
圖7 控制輸入變化
圖8表明, 當集總擾動發生變化時,ESO依然能對變化的集總擾動有良好的估計能力,從而提高控制器的控制性能。
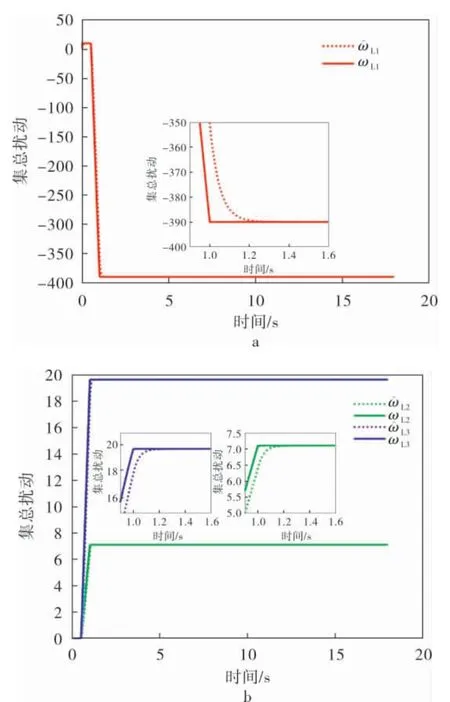
圖8 集總擾動估計曲線
5 結束語
針對具有未知內部動態和外部干擾的二階非線性系統, 提出基于ESO-超螺旋滑模控制策略,采用Lyapunov穩定性理論證明了其有效性。在多缸液壓機上的仿真結果表明,筆者所提組合控制器能實現高精度的位置跟蹤與輸出調平。
