基于MATLAB的客觀操穩數據處理程序設計
2022-05-30 08:50:36潘玉斌余欣
汽車零部件 2022年5期
關鍵詞:數據處理
潘玉斌,余欣
舍弗勒智能駕駛科技(長沙)有限公司,湖南長沙 410100
0 引言
操縱穩定性是汽車的一項重要性能指標,指在駕駛員不感覺過分緊張、疲勞的條件下,汽車能按照駕駛員通過轉向系及轉向車輪給定的方向(直線或轉彎)行駛;且當受到外界干擾(如路不平、側風、貨物或乘客偏載)時,汽車能抵抗干擾而保持穩定行駛的性能。汽車行業內有著完整的評價體系,20世紀60年代開始,國內外已針對現有評價系統制定了較為完善的試驗測試方法。但是測試數據的后處理,存在數據處理量大及工作重復的問題。整車開發階段,底盤調校、整車性能驗收都會涉及操縱性的客觀數據測試,操縱穩定性一般需要反復進行多輪測試。操縱穩定性的評價指標較多,需求的計算量很大,目前各車企在評價指標上也會有所差異,給測試工程師帶來了很大的計算工作量。
試驗數據分析前需要篩選、取樣、濾波、數據補償等大量的數據前處理工作。操縱穩定性試驗對駕駛員技能、環境等要求高,測試數據容易受到外界影響,如測試過程穩速、方向盤操作、路面情況等都會造成數據不準確,一般是試驗人員進行多次測試,并對數據進行多次篩選。為保證測試數據完整性,涉及數據取樣及截取的問題,一般也會在測試開始前做好數據記錄。由于傳感器安裝位置受限,如質心、前后軸的速度、加速度等無法直接測出的參數,需要進行后續補償。
基于以上原因,雖然很多測試服務商開發了數據處理程序,大都是自己內部使用。當然,測試設備服務商也會隨設備打包提供數據處理軟件,但是一般基于法規標準開發,不能滿足主機廠個性化的需求。MATLAB作為功能強大、腳本代碼簡單易懂的數據處理軟件,使用范圍較廣泛。因此,基于MATLAB開發靈活、標準流程的操穩數據處理程序是非常重要的。
1 數據處理程序組成
本文主要從原始數據處理取樣、偏移補償、傳感器安裝位置補償以及不同工況下的特征值計算等方面設計處理程序,如圖1所示。

圖1 數據處理程序組成
2 數據前處理
2.1 數據篩選及取樣
根據測試標準中要求的輸入條件以及實際測試的輸入參數來判定數據的有效性。如:在掃頻測試中,測試要求輸入條件:①車速為(96±2)km/h;②輸入轉角為23°±0.5°;③頻率范圍為0~4 Hz。
車速及方向盤角度的數據篩選如圖2所示。
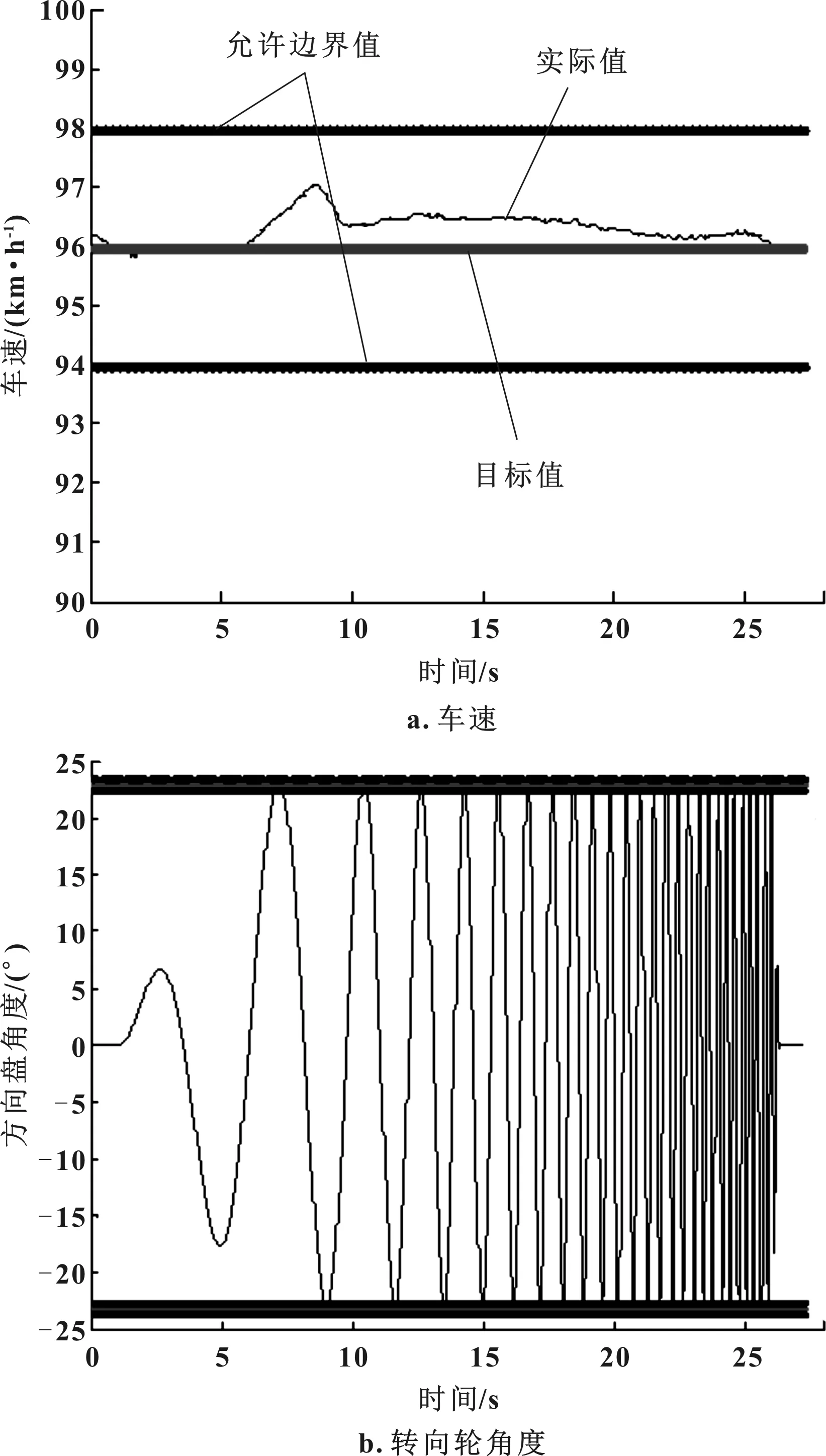
圖2 車速及方向盤角度的數據篩選
根據測試要求對數據的有效性進行判定,剔除不滿足要求的數據組。選取的有效數據進行截取、取樣,必要時可通過插值的方法增加數據采樣點。
2.2 濾波器設計
MATLAB工具箱自帶多種濾波器,根據經驗及數據處理對濾波器進行設計。選擇FIR濾波器,濾波前后不允許出現相位差,標準濾波器設置參考ISO15037,其中通帶截止頻率設置為0~5 Hz,阻帶截止頻率設置為10~15 Hz;通帶中的濾波器增益為1.005,阻帶中的濾波器增益為±0.01。
濾波器設計原理及響應變化曲線如圖3和圖4所示。
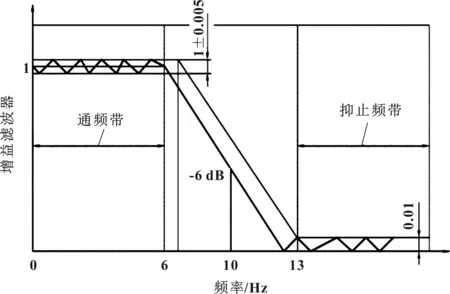
圖3 濾波器設計原理
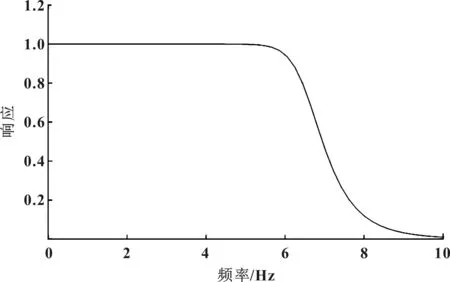
圖4 濾波器響應變化曲線
2.3 數據零點偏移補償
由于傳感器自身的零點誤差,采集到的數據需要重新校對零點位置,補償零點偏移的誤差。
需要進行零點偏移補償的物理參數如下:
(1)方向盤傳感器輸出信號:方向盤轉角及力矩信號;
(2)陀螺儀輸出信號:橫擺角速度、側傾角、俯仰角、側向加速度。
物理量參數標零包含兩方面:①設備物理標零。設備啟動后,按照設備操作進行物理標零操作。②數據動態標零,也就是對采集到的數據進行校驗、數據補償標零。一般測試起始階段要求車輛保持勻速、直線行駛以穩定在測試需求的狀態,后處理時取車輛勻速直線行駛段數據,以上信號輸出值為零,判定數據零點偏移量,并進行數據偏移補償。
圖5為方向盤轉角偏移補償。由圖可知,0~0.3 s內直線行駛,方向盤轉角為零,傳感器信號輸出2.1°,數據往下偏移2.1°。

圖5 方向盤轉角偏移補償
在測試過程中也會出現數據偏移量隨時間遞增、遞減甚至不規律的變化,這種一般視為無效數據,需要多次操作進行比對。另外,出現這種不穩定的情況時,一般要確認操作輸入方式是否正確、周圍環境以及設備本身是否存在問題。
2.4 傳感器位置補償
表征整車狀態的物理量必須為質心處的運動狀態數據,同時計算前后軸的側偏、滑移也需要前后軸的瞬時狀態數據。因傳感器安裝相對質心前后的中心有位置偏差,需根據傳感器測得的物理量以及傳感器相對整車質心、前后軸中心的偏差位置計算車體質心處的物理量。
車速()、航向角()信號由光學車速傳感器輸出,橫向加速度()由陀螺儀輸出,根據剛體運動學原理,考慮車體橫擺、側傾及俯仰計算質心處的、、c,其中車體橫擺角速度影響較大。傳感器位置補償如圖6所示。
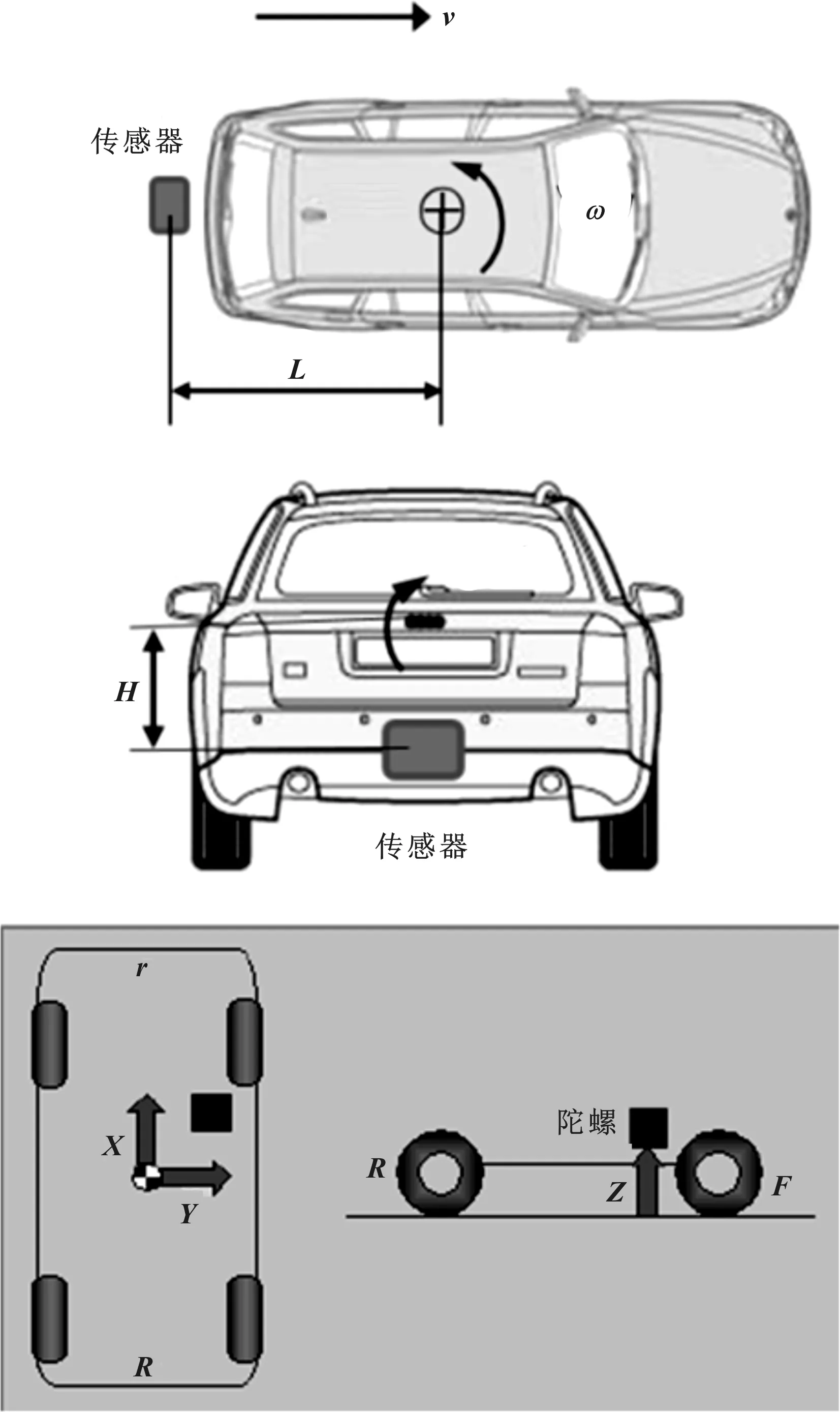
圖6 傳感器位置補償
質心處側向加速度計算公式為:

(1)
質心處向車速等同于激光測試傳感縱向車速,向車速計算:

(2)
質心處航向角
(3)
3 試驗項目數據結果處理
客觀操縱穩定性測試項目中,掃頻試驗涉及頻域響應計算,穩定性測試項目需計算側偏角、靈敏度等,中心區測試涉及需要計算的特征值比較多,這3項測試項目計算量大,具有代表性。本文以這3項測試為基礎,對其進行工況測試分析以及驗證程序計算結果。
3.1 掃頻試驗
由于車輛是“彈性+阻尼”的系統,不同方向盤輸入頻率下,系統響應會有一定的差異。根據典型的阻尼系統特征,主要從增益、延遲角、延遲時間、相關性等指標進行評介。
掃頻試驗是考核固定車速下以不同的方向盤角度進行轉向,整車橫向響應的一致性。主要考核側向加速度、橫擺角速度、側傾相對方向盤轉角在頻域上的響應,即幅頻特性(增益)、相頻特性(延遲)。
采用MATLAB FFT快速傅里葉變換函數。
頻率響應函數為:

(4)
增益的計算 :

(5)
相位角計算:
(6)
相干性計算:
(7)
相干性計算,調用MATLAB工具箱函數(,)。
以橫擺角速度增益為例,計算不同方向盤轉角輸入頻率下增益、延遲、相關性等參數。原始數據計算結果為離散數據,根據經驗用多項式進行擬合,如圖7所示。
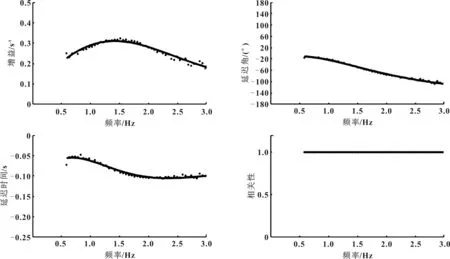
圖7 掃頻測試結果
由于受場地及測試輸入條件的限制,方向轉角輸入0.2~4 Hz,穩定區域范圍為0.5~3 Hz。通常,根據擬合曲線計算出頻率0.2 Hz時,轉向響應增益作為穩態響應增益(0),共振頻率此時也就是最大增益記為,對應的共振頻率為max。比值/(0)表征響應的一致性,max反映系統的剛度特性。
3.2 穩態回轉
用于評價穩態時的車輛特性主要有轉向特性和穩定性。分別繪制方向盤轉角、車軸側滑角、轉向盤力矩、車體側傾角與側向加速度關系曲線,以及計算特定區間內的梯度值,評價車輛穩態特性。
采用定速、緩慢增加方向盤轉角的測試方法,恒定車速80 km/h,誤差±1 km/h,緩慢轉動方向盤,側向加速度變化量0.1/s,可通過控制方向盤轉角13.5(°)/s,操作過程穩定、均勻。
采用定圓測試方式,可分為穩態和準穩態兩種方式。穩態測試方式是在固定軌跡半徑且在間隔均勻的不同車速下采集相關數據,計算離散車速狀態下的特征值。結果數據為離散狀態,并進行擬合。準穩態方式是在固定軌跡半徑下,先在設定的軌跡圓,以允許的最低車速繞圓行駛,達到穩態,緩慢增加車速、同時操作方向盤保持車輛軌跡,同樣保持車輛側向加速度增加約0.1/s,直至后軸出現側滑。該測試方法為連續且接近穩態,因此稱之為準穩態,測試數據為連續狀態。兩種測試方法要求軌跡的偏差在0.5 m范圍以內。
主要評價指標:
(1)轉向靈敏度/側偏角在不同加速度區間梯度:表征轉向時響應的線性特性;
(2)轉向力矩/側傾角在不同側向加速度區間的梯度及典型側向加速度下的值:表征力的線性特性及轉向手感。
阿克曼轉向就是計算由于方向盤轉動引起的輪胎轉角(不考慮側偏),產生的側向加速度。阿克曼轉角計算公式如下:
(8)
(9)
(10)
式中:為方向盤轉角;
為轉向傳動比;
為前輪轉角;
c為質心處側向加速度;
為質心處車速;
為質心處轉彎半徑。
車輛簡化模型如圖8所示。
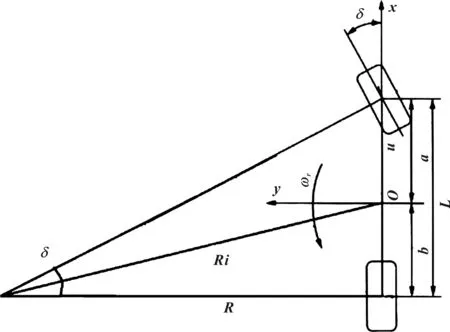
圖8 車輛簡化模型
穩定性數據處理結果如圖9所示,包括不同側向加速度下方向盤轉角、側偏角、轉向力矩、車身側傾關系曲線。計算程序設計了關鍵特征值計算模塊,得到0.2~0.4區間內特征值為:轉向靈敏度 1.43/100°(方向盤轉角);不足轉向梯度4.85(°)/;轉向力矩梯度3.87(N·m)/;車身側傾梯度3.75(°)/。
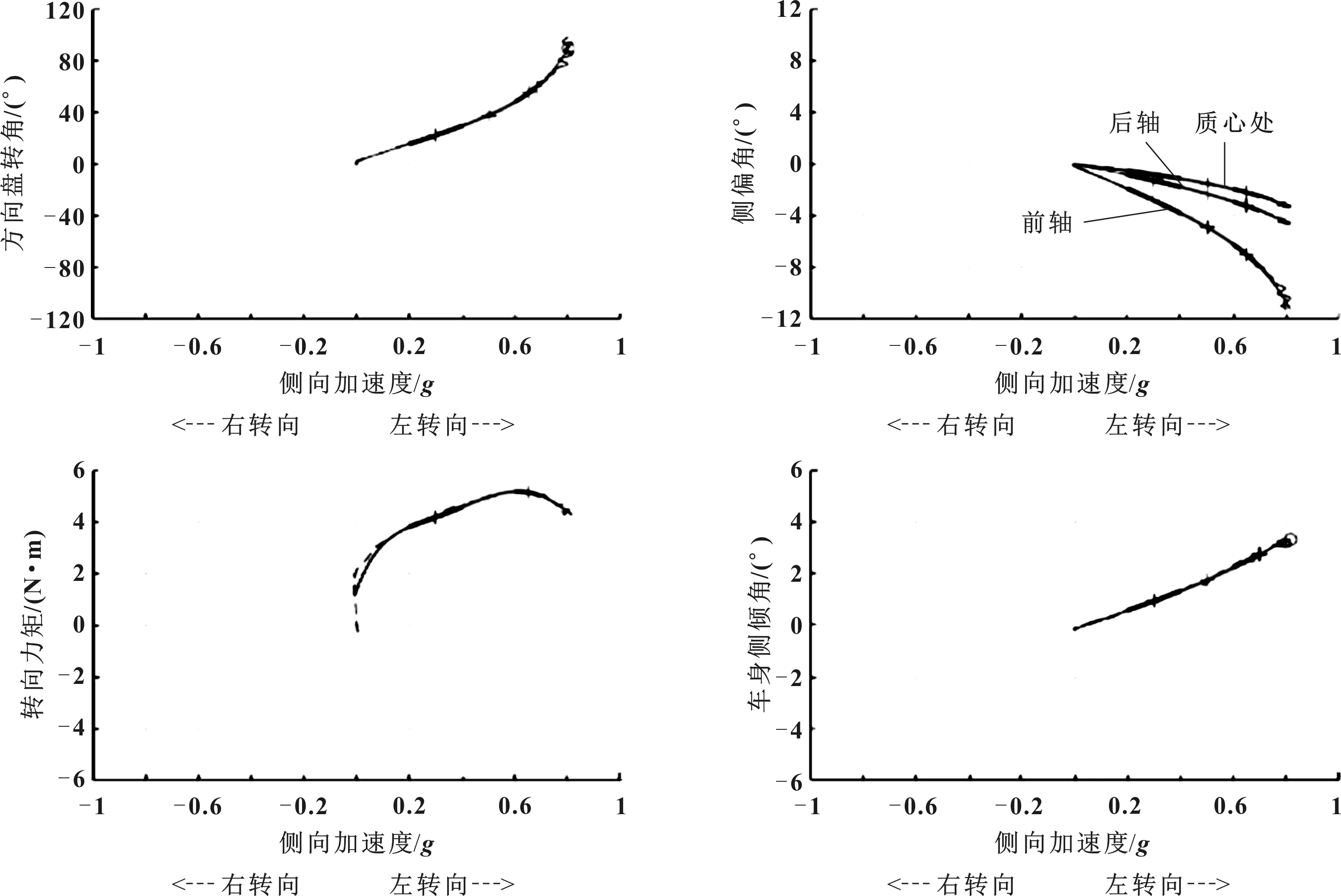
圖9 穩定性數據處理結果
3.3 中心區響應
中心區響應主要考核車輛中高速行駛、方向盤小幅度正弦輸入、側向加速度在0.2以內時,車輛響應、駕駛員操作手感(方向盤力),表征車輛在快速路或高速路非緊急單次變道或連續變道時車輛操縱性能、穩定性。主要從以下方面考量:
(1)方向盤力矩與方向盤轉角、側向加速度、橫擺角速度關系曲線,表征力的線性度、力的大小、中間間隙;
(2)橫擺角速度、側向加速度與轉角的曲線關系,表征響應的靈敏度、響應死區、線性度;
(3)轉向力的梯度與側向加速度關系曲線,表征車輛反饋的路感。
測試方法:一般測試60、96、120 km/h車速下,側向加速度0.2,方向盤轉角以0.2 Hz正弦輸入,3個周期以上。
中心區數據處理結果如圖10所示,包括不同方向盤轉角輸入下方向盤力矩、側向加速度、橫擺及側向加速度速度關系曲線以及轉向力矩-橫擺角速度曲線。

圖10 中心區數據處理結果
同時數據處理程序可對各特征值指標進行計算,得到主要特征值結果為:方向盤轉矩為0時側向加速度-0.06;0處的轉向力矩1.55 N·m;0處的方向盤力矩梯度為25.01(N·m)/;0.1處方向盤力矩為2.6 N·m;0.1處方向盤力矩梯度為13.29(N·m)/。
4 結論
數據處理程序在實際試驗過程中進行了驗證使用,并同專業商業軟件進行結果對比,誤差較小。作為操穩試驗數據處理的核心部分,可以協助測試工程師快速完成試驗的數據分析、報告編制等。數據處理軟件兼顧了標準報告的結果曲線繪制及特征值計算,大大提高了效率。程序設計時,考慮了數據前處理的通用化以及不同工況處理的模塊設計,減小了數據前處理的程序設計量,提高了各不同模塊程序編輯的獨立性,程序使用靈活。
但是,數據處理程序尚未形成交互界面,用戶需熟悉MATLAB腳本語言,對使用者要求較高。數據測試特征值的處理、曲線繪制是固化在各數據處理模塊程序內部,未形成獨立計算子模塊。程序尚未開發數據存儲及對比功能,尚不支持多車型數據對比功能。程序人機交互界面設計以及客戶自定義的特征值計算、數據庫管理等擴展功能是未來需進一步的工作。
商用車領域,越來越多的中重卡車企開始關注整車的操穩性能,操穩測試需求越來越多,程序化的操穩后處理程序應用也越來越廣。
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35
