新能源匯集站調相機附加控制研究
2022-06-01 09:16:20朱建華柳方舟李湘韶劉芳芳
水電與新能源 2022年5期
朱建華,李 巖,柳方舟,李湘韶,劉芳芳
(1. 潤電能源科學技術有限公司,河南 鄭州 450000; 2. 華潤電力(溫州)有限公司,浙江 溫州 325810;3. 徐州華潤電力有限公司,江蘇 徐州 221142; 4. 華潤電力焦作有限公司,河南 焦作 454001)
近年來,隨著新能源開發的力度不斷加大,新能源裝機占比不斷提升。但新能源出力不穩定,對系統電壓和頻率穩定都造成一定壓力[1-4]。為更好滿足新能源站調壓需求,國內部分新能源匯集站配置了分布式調相機。文獻[5]研究了包含主變高壓側電壓控制的調相機對河南電網的穩定性影響,為此類調相機控制器調整提供了整定依據。文獻[6]研究調相機對直流閉鎖后電壓穩定影響。文獻[7]對直流換相失敗后調相機的暫態強勵策略進行研究,調相機的暫態性能提升交直流電網的暫態能力。文獻[8]研究了華東電網調相機自動電壓控制策略,研究結果表明,合理的控制策略提升了電網穩態電壓水平。文獻[9]對調相機內部的低勵限制、定子電流限制等內部環節做了論述,為調相機的參數配合和策略優化提供研究依據。文獻[10]論證調相機對西北地區弱送端電壓的暫態電壓無功支撐能力。據已有資料,青海已建成國內首個電源側分布式調相機應用項目,為青豫直流送出新能源提供無功支撐,但關于分布式調相機的低頻振蕩抑制研究,還未見相關研究。
目前,基于調相機抑制振蕩的問題多集中于暫態電壓穩定范圍,而利用調相機抑制低頻振蕩的研究較少。因此,本文結合調相機可調節容量大和調節速度能夠滿足低頻振蕩響應需求的特點,提出用于系統低頻振蕩抑制的分布式調相機附加阻尼控制策略。
1 調相機模型
1.1 調相機本體模型
單臺調相機接入無窮大系統對應的數學模型如下所示:
(1)

1.2 小干擾模型
調相機正常運行時,功角δ近似等于0,可以近似認為小干擾分析時sin(δ0)=0,δ0為選定的調相機運行點對應的功角[11]。
同步發電機線性化可以直接得出海倫-菲利普斯模型,具體表達式參見文獻[12]。在調相機線性化模型的主要參數K1~K6中,K2是sin(δ0)的函數,認為K2=0和K4=0。
簡化后的調相機線性化模型如圖1所示。
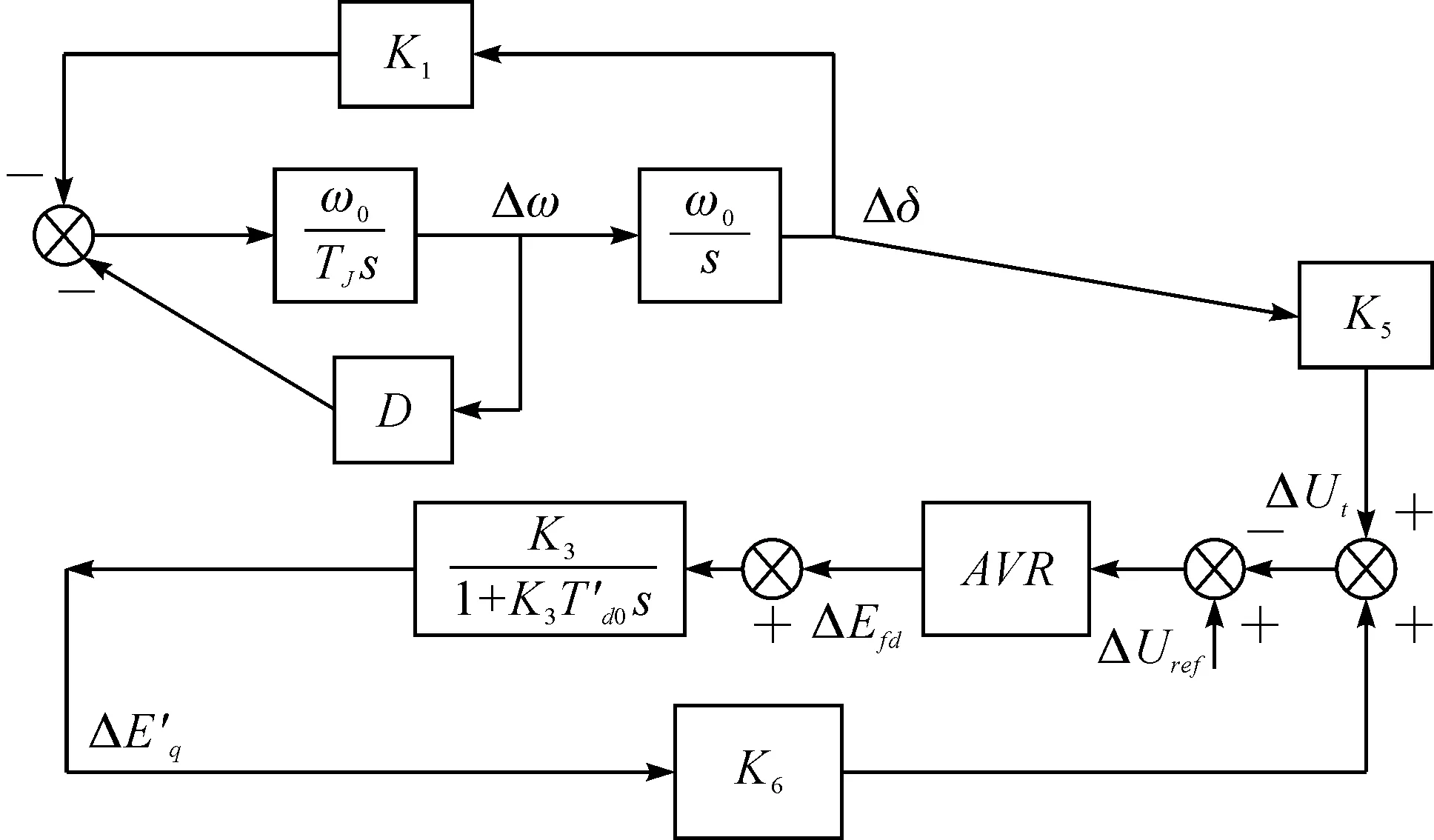
圖1 調相機的線性化模型圖
從圖1可以看出,調相機模型可以分解為兩個聯系較為松散的子閉環模型。同步發電機設計阻尼控制策略時,多考慮將發電機的功角、轉速、有功作為輸入。但對于調相機而言,由于有功和無功基本解耦,因此不宜將調相機功角、有功作為阻尼控制的輸入,需要考慮將遠方控制信號或本地的電流或匯集站有功作為控制輸入。
1.3 控制有效性論證
關于調相機是否給系統提供阻尼的問題存在較大分歧,文獻[13]認為調相機無法提供阻尼,主要理由是同步發電機的PSS提供阻尼的主要是通過勵磁繞組磁鏈變化提供的電磁轉矩變化量產生的,而調相機中電磁轉矩變化很小,所以無法提供阻尼。
本文認為文獻[13]的說法是正確的,調相機無法通過改變q軸暫態電動勢的變化量,而q軸暫態電動勢的變化影響調相機阻尼,因此,調相機附加控制無法改變本機的阻尼特性。但調相機可以調整發電機機端電壓,進而改變系統特性。
2 附加阻尼控制策略
控制器對應的結構如圖2所示。

圖2 附加控制的傳遞函數圖
如圖2所示,阻尼控制主要分為四個環節。首先是濾波環節,Tw=5 s,可以濾除暫態分量,避免阻尼控制器輸出對調相機暫態響應構成干擾。第二部分為超前滯后環節,這里選取2階傳遞函數,Td1和Td2的參數選取需要根據調整效果進行優化。Kpss為阻尼控制的比例增益,其參數大小可以影響阻尼控制的調節速度。最后為限幅環節,設置為±5%,以勵磁電壓額定值為基準。
附加控制參數配置需要考慮的問題主要有:
1)參數的適應性。阻尼控制需要適應電網的運行方式的變化,不宜過度強調在某種運行方式下最優補償效果。需要綜合權衡多種運行方式補償效果。特別是對新能源送端電網時,白天和晚上潮流方向完全相反,需要重點考慮潮流方向逆轉時阻尼控制的適應性。
2)與自動電壓控制的協調配合。阻尼控制器前端內置有濾波環節,可以將0.2 Hz以上的高頻分量隔離。但對于0.2 Hz以下的低頻分量,需要根據電壓調整效果進行整定和配合研究。
3)輸入量選擇問題。與同步機的電力系統穩定器不同,附加阻尼控制不宜選擇調相機的轉速、有功、功角作為輸入量。根據靈敏度計算結果可以在匯集站電流、有功、母線電壓頻率中選擇。
3 仿真驗證
為驗證設計控制策略的控制效果,搭建仿真模型見圖3。四機系統的模型見參數參考文獻[14]。
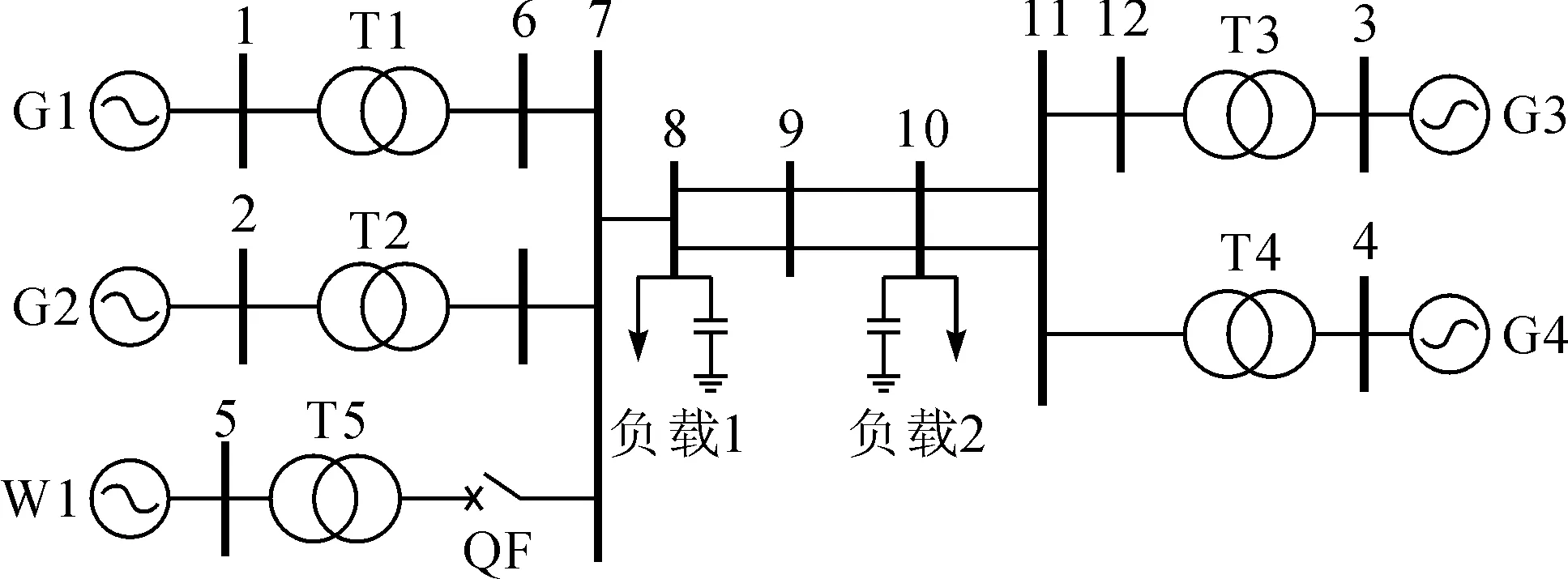
圖3 四機系統示意圖
3.1 不同運行方式的控制策略有效性
為驗證阻尼控制器對運行方式的適應性,模擬新能源上網為典型聯網發電運行方式,上網功率為141 MW左右。夜晚,模擬新能源脫網其他負荷從電網下功率的脫網用電運行方式,下網功率為45 MW左右。仿真兩種運行方式下控制策略適應性,對應時域波形如圖4所示。
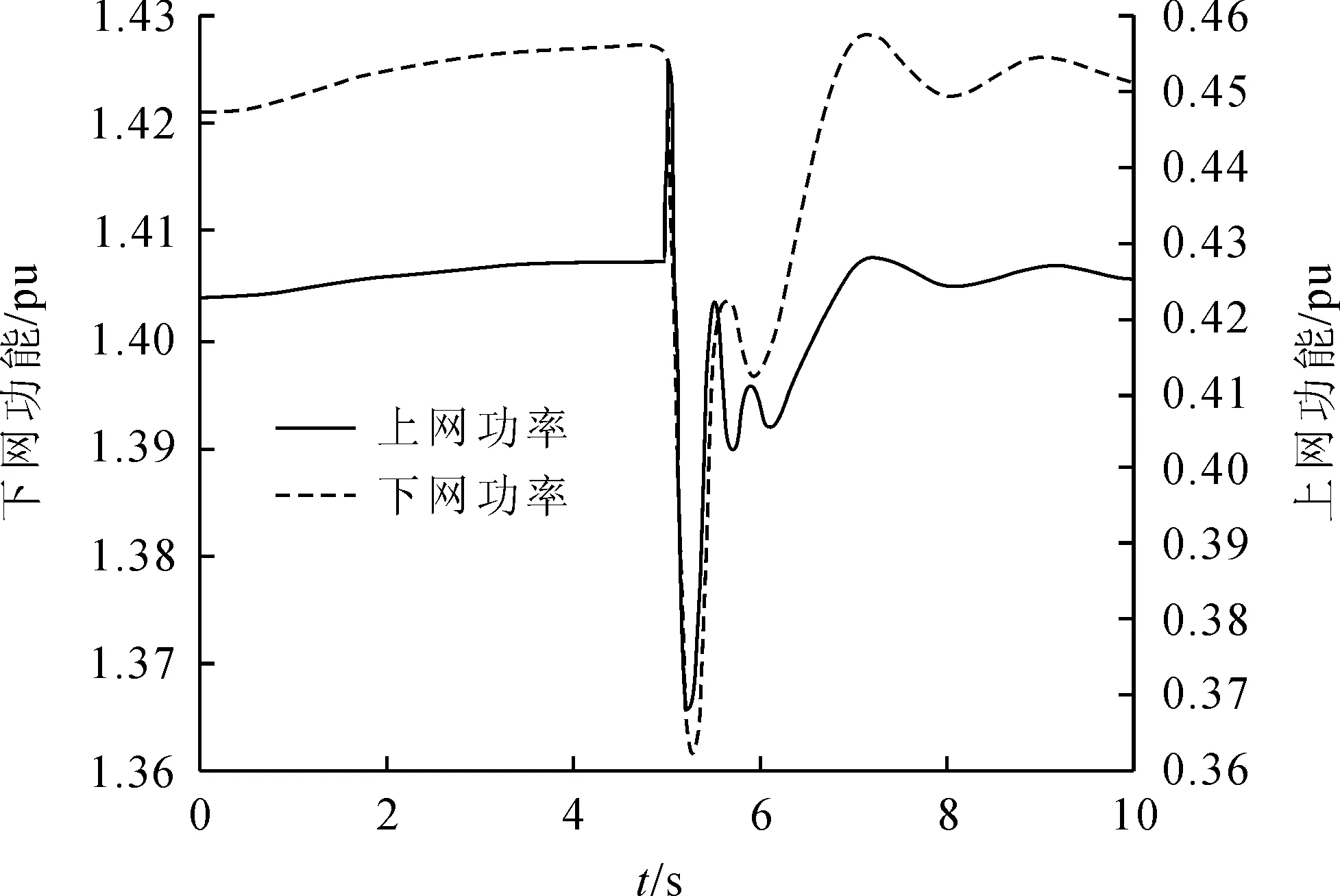
圖4 不同運行方式新能源電站出線電流對比圖
從圖4可以看出,兩種運行方式下控制策略取得較好控制效果。在下網運行方式下,正向和反向功率振蕩均存在,恢復時間在2 s左右。在聯網發電方式下,負向功率振蕩較大,恢復時間與脫網用電運行方式一致,也在2 s左右。從圖4可以看出,在不同運行方式,阻尼控制均取得較好效果,說明所提控制策略具有一定的適應性。
3.2 不同輸入變量的控制策略有效性
為驗證不同輸入變量對控制策略有效性的影響,在5s時刻設置1號機機端電壓發生5%階躍電壓激勵,在系統產生一定功率振蕩。仿真三種控制策略時域響應,對應時域波形如圖5所示。
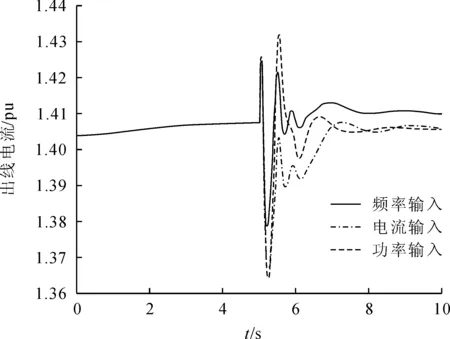
圖5 下網功率下三種控制方式下電流對比圖
從圖5可以看出,三種控制策略在抑制有功波動上均取得較好效果。采用頻率輸入的控制策略,電流波動抑制效果最好,后期電流恢復穩態時間最長。電流輸入控制策略超調相對較大,恢復穩態時間較短。功率輸入超調最大,后期恢復時間與電流輸入控制策略類似,均短于頻率輸入的控制策略。
3.3 控制阻尼控制對原有區間模式的影響
為驗證阻尼控制器對區間振蕩模式的影響,選擇時域分析法,對比傳輸線曲線實現模態對比的目的。仿真兩種運行方式下區間振蕩模式變化趨勢,對應數據如圖6所示。
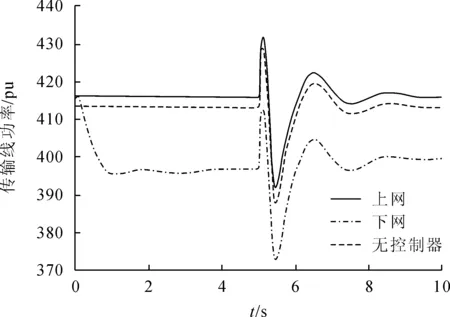
圖6 不同運行方式下傳輸線功率對比圖
從圖6可以看出,三種運行方式下傳輸線功率有所差異,主要原因新能源電站的加入導致系統潮流變化,進而導致傳輸線電流變化。但對比三種方式下傳輸功率,振蕩周期基本一致,阻尼也基本一致,說明調相機附加阻尼加入對區間振蕩模式影響很有限,主要原因是調相機容量有限,僅有50 MVar。而4臺主力機組容量均為900 MVar,調相機容量僅占系統機組容量的1.39%。
4 結 語
1)研究了新能源匯集站的調相機電力系統低頻振蕩和阻尼特性,推導出調相機小干擾傳遞函數,并通過時域仿真驗證了小干擾模型和控制策略的有效性。
2)在聯網發電和脫網用電運行方式下,控制策略均能夠適應潮流方向變化,為系統低頻振蕩提供正阻尼,對實際電網的潮流變化具有一定的適應性。
3)對比三種不同控制輸入的控制策略,不同輸入的控制策略均取得較好的控制效果。相對而言,電流輸入的控制動態效果最好,其他兩種控制策略恢復穩態效果稍差。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
消費導刊(2018年10期)2018-08-20 02:57:02
中華詩詞(2018年11期)2018-03-26 06:41:34
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
Coco薇(2016年8期)2016-10-09 02:11:50
通信電源技術(2016年1期)2016-04-16 04:57:26
風能(2015年4期)2015-02-27 10:14:36
