觀光車避撞行人的AEB 算法優化研究
2022-06-04 06:41:20秦少威郭啟薪王春龍
裝備制造技術 2022年2期
黃 好,秦少威,郭啟薪,王春龍
(柳州五菱新能源汽車有限公司,廣西 柳州 545007)
0 引言
觀光車屬于我國的特種設備,是場(廠)內專用機動車輛,而專用機動車輛與行人相撞的交通事故逐年增加,而自動緊急制動系統(AEB,Autonomous Emergency Braking)可以避免27%的碰撞事故[1]。通過雙目攝像頭和毫米波雷達采集行人信息進行處理,計算出觀光車與行人的安全狀態。當觀光車前方出現行人,造成安全隱患時,觀光車AEB 緊急制動系統首先會對駕駛員發出警報信號提醒駕駛員采取制動措施,若駕駛員沒有踩下剎車進行制動,則預警系統將對車輛行駛狀態進行控制,因此開展觀光車AEB 避撞行人算法研究具有重要的意義。
在AEB 避撞行人算法上,普遍采用的指標為碰撞時間[2](Time to Collision,TTC),進而構建風險評估模型,由風險評估模型確定觀光車行車過程中不同路況下的信號觸發機制,根據不同的道路工況劃分不同的風險等級。利用風險評估確定危險系數,從而確定觀光車的行車狀態和預判行人行走狀態以避撞行人。例如,楊為等[3]通過車輛的逆動力學模型,運用遺傳算法優化了AEB 系統TTC 算法;何霞等[4]研究AEB 系統控制策略中觸發寬度對行人橫穿場景結果的影響,通過設計AEB 縱向控制算法模擬行人橫穿危險場景,不斷調整觸發寬度;Shimizu 等[5]針對車輛行駛過程中可能突然遇到行人竄出的危險場景,設計出了一種基于行車-行人碰撞速度的風險量化數學模型。鄭剛等[6]利用正交實驗法及聚類分析法對不同駕駛員進行分類,擬合不同類別駕駛員的反應時間與駕駛速度之間的關系曲線,并將其應用于報警及制動閾值的修正,優化了汽車的自動緊急制動系統。以上研究主要針對汽車的實際運行環境來優化AEB 算法,但由于觀光園區的道路非常簡易,路窄彎急,人車混流現象嚴重,觀光車與行人的相對速度、相對減速度及相對距離不斷變化,汽車的AEB 系統避撞行人算法在觀光園區內不能很好適應。
考慮觀光車與行人目標物的縱向相對距離及相對加速度的影響,利用TTC 碰撞時間算法建立三個觀光車行人避撞預警等級,分別為玉級行駛安全級,Ⅱ級碰撞預警級和Ⅲ級碰撞危險級;根據不同車速下觀光車的實際制動過程,設置不同的冗余安全距離,得到觀光車AEB 行人避撞的制動安全閾值,優化了觀光車行人避撞的AEB 算法,并通過實例驗證。
1 觀光車AEB 行人避撞的TTC 算法
觀光車AEB 系統以傳感器檢測技術為基礎,對周圍路況進行信息采集處理,根據處理的數據信息輔助駕駛員判斷對車輛前方行人及障礙物,提高駕駛員的安全駕駛能力,進一步保障觀光車與路況行人的安全[7]。系統將毫米波雷達傳感器收集到的行人信息(行人的初速度,行人的相對距離)發送到觀光車系統控制器,控制器通過控制單元對行人的狀態信息進行分析處理和預判。當系統內控制單元判斷出自車與前方行人有碰撞風險時,系統發出預警報警信號,當觀光車與行人相對距離小于最小安全距離時,系統主動控制車輛進行制動減速,避免撞到前方行人。
目前觀光車AEB 的風險評估模型有安全距離算法模型和碰撞時間算法模型兩類,但安全距離算法模型由于涉及了大量的數據信息,計算過程比較繁雜,故采用碰撞時間算法模型。碰撞時間算法模型TTC是指以某一特定時刻為開始,駕駛員在駕駛過程中,遇到緊急情況時緊急制動發生到緊急制動結束,這一過程中避免碰撞發生時間。觀光車AEB 避撞行人策略的研究對象主要為觀光車與行人,當計算出來的距離碰撞時間TTC 越大,表明觀光車行車越安全,碰撞危險系數越低;若距離碰撞時間TTC 越小,則表明觀光車行車越危險,危險系數越大。
根據車輛與行人碰撞時間的原理,考慮觀光車與行人目標物的縱向相對距離及相對加速度的影響,則觀光車AEB 行人避撞的TTC 算法為:
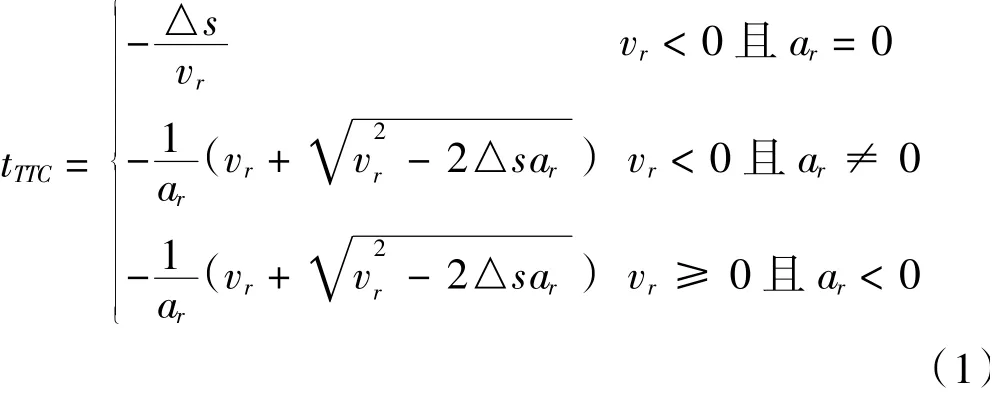
式中,tTTC為距離碰撞時間,△s為觀光車與行人的縱向相對距離,vr、ar分別為兩者的相對速度和相對加速度。
利用TTC 碰撞時間算法建立3 個觀光車行人避撞預警等級,分別為玉級行駛安全級,Ⅱ級碰撞預警級和Ⅲ級碰撞危險級,其中玉級表示觀光車前方無行人障礙物或行人障礙物在安全距離外,Ⅱ級表示觀光車有可能會碰撞到前方的行人,Ⅲ級表示AEB 系統發出自動緊急制動信號以避免碰撞到車輛前方行人。對于不同的觀光車行駛狀態以及行人行走狀態,基于分級預警算法對整個安全系統進行了安全等級劃分,觀光車避撞行人安全等級劃分如圖1 所示。
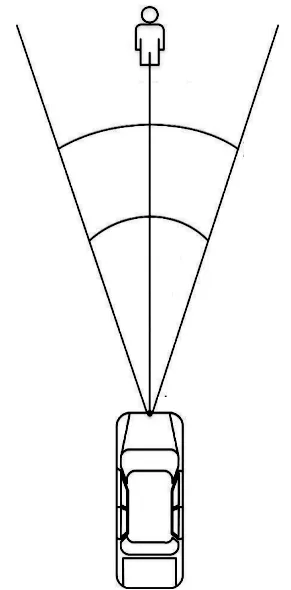
圖1 觀光車避撞行人安全等級劃分
由于觀光車開始緊急制動后,觀光車與行人的相對速度、相對減速度及相對距離不斷變化,算法越來越復雜,TTC 預警碰撞風險評估模型有可能會出現誤判的情況。因此,需要對觀光車的行車緊急制動進行優化研究,提高TTC 算法的可靠性。
對觀光車AEB 行人避撞系統的工作區域進行劃分,劃分區域如圖2 所示。
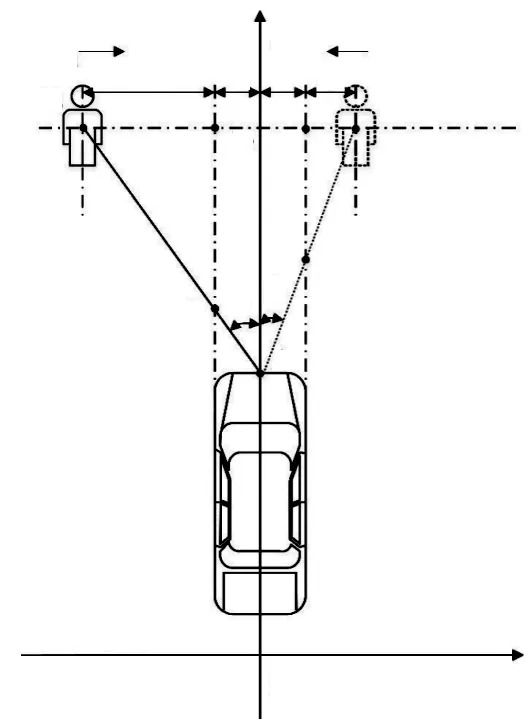
圖2 AEB 行人避撞系統工作區域劃分
由圖2 可知,若行人與觀光車距離足夠近的時候,觀光車AEB 行人避撞系統可能有3 種狀態:閉合、待工作、激活狀態。若行人處在BCG 或EFH 區域,且v1≠0 或v2≠0 ,AEB 避撞行人系統將處于待工作狀態,此時的風險評估模型不會發出任何控制信號,系統將以圖像等形式提示駕駛員注意行人安全。若行人處在AECGH 區域,不管行人處于什么運動狀態,AEB 避撞行人系統將被激活,此時,風險評估模型將會發出行人碰撞預警或自動緊急制動信號。
2 考慮制動過程的AEB行人避撞優化算法
為了避免由于TTC 模型的局限性而造成失效,在Ⅲ級碰撞危險級的情況下,此時行人距離觀光車已經很近,車輛的制動安全距離=響應距離+制動距離+冗余安全距離[8-9]。響應距離是指駕駛員發現橫穿行人到采取制動之前的車輛行駛距離。冗余安全距離則表示為觀光車完成緊急制動停止后,車輛自身與行人之間的距離。制動距離指車輛制動器由開始制動響應到減速度線性增長的制動距離,制動距離指觀光車在制動過程中,減速度恒定,一直到速度為0 的制動距離。
為了明確各三級預警系統分級,利用預警分級算法間算出TTC 碰撞時間并進行區間劃分。Ⅱ級預警的報警時間長短對于觀光車AEB 行人避撞系統而言及其重要,它影響著系統的可行度和是否對行人避撞成功。在Ⅱ級預警的過程中,如若系統預警時間太過于短,則有可能會造成駕駛員來不及反應,那么這樣將起不到需要的預警效果。如果Ⅱ級預警時間過長,有過能會對駕駛員的正常駕駛造成干擾,甚至加深駕駛員對系統的不信任,也會帶來負面效果。因此,Ⅱ級預警的預警時長應該符合實際情況。為了確定一個合理的預警時間,需要對觀光車的緊急制動過程進行詳細的分析。
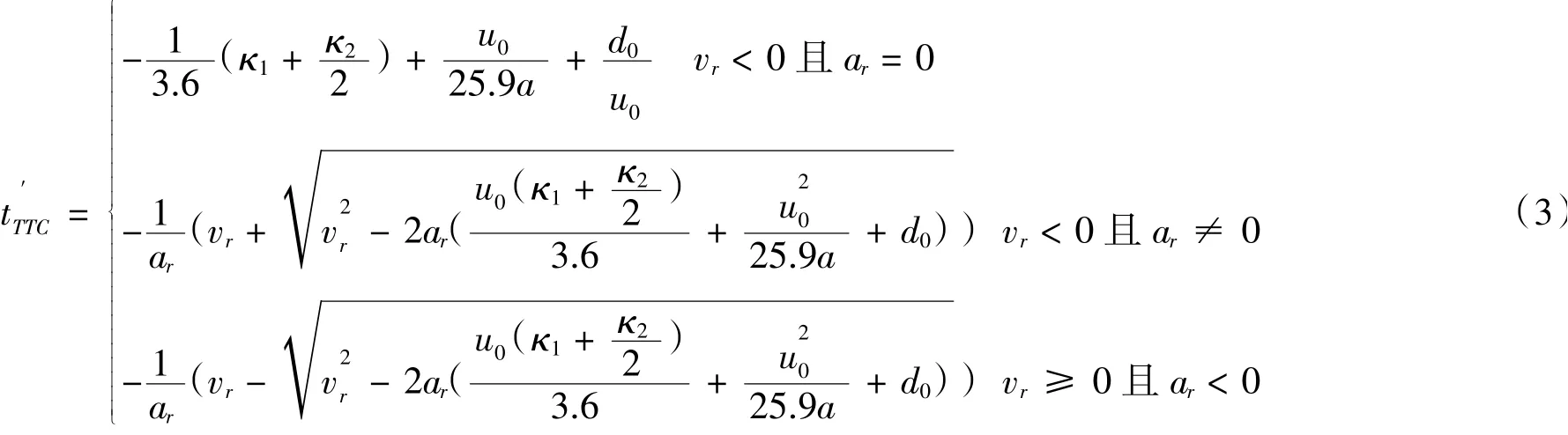
為了精確計算車輛的制動安全距離,需要考慮觀光車緊急制動過程,其中駕駛員反應時間由駕駛員收到制動信息的時間和駕駛員執行制動動作的時間組成,一般駕駛員反應時間為0.3 ~1.0 s;制動器作用時間由制動器間隙時間和制動器動力增長過程時間組成,一般制動器作用時間為0.2~0.9 s。假設在制動過程中減速度恒定,則觀光車制動安全距離d為:
式中,u0為觀光車初始速度;κ1、κ2分別為制動器間隙時間和持續制動時間;a為制動減速度;d0為冗余安全距離,根據不同的測試工況,可設置了不同的行人冗余安全距離,d0可取1.5 ~2 m,隨著觀光車的初始速度變高,觀光車與行人之間的冗余安全距離也會隨之相應增大。 將式(2)帶入式(1)得到觀光車AEB行人避撞的優化算法為:
3 案例分析
選取某車型的觀光車為例,觀光車與人形目標縱向距離為40 m,分別以15 km/h、20 km/h、25 km/h 和30 km/h 的車速進行測試,行人為靜止狀態。四種工況下的冗余安全距離分別為1.5 m、1.8 m、1.9 m 和2.0 m,每種工況的風險評估模型進行6 次測試,根據制動信號得到玉級和Ⅱ級、Ⅱ級和Ⅲ級碰撞危險級的分界測試值,并根據式(3)可以得到各級碰撞危險級的分界理論值,見表1。

表1 觀光車各級碰撞危險級的分界值
觀光車避撞行人算法以車輛制動安全距離理論為基礎,確定了不同安全等級下TTC 區間取值范圍,根據車輛初速度劃分TTC 的取值范圍和對應等級安全,其中15 km/h、20 km/h、25 km/h 和30 km/h 的車速下,Ⅲ級碰撞危險級的理論值分別為1.06、1.08、1.20 和1.48。在各級碰撞危險級下根據不同的車速計算出不同的冗余安全距離,得到不同車速下觀光車AEB 行人避撞的制動安全閾值,建立的觀光車避撞行人的AEB 算法更加合理。由表1 可以看出,隨著測速得增加,各級碰撞危險級的分界值也不斷增加,當觀光車的速度為30 km/h 時,各級分界測試值和理論值之間的誤差分別為0.21 s、0.17 s,均在誤差的允許范圍內,且在測試過程中預警信號的發出和自動緊急制動的執行皆符合系統要求,風險評估模型對行車過程中危險系數評估和碰撞安全等級的劃分都準確無誤。
4 結論
利用TTC 碰撞時間算法建立三個觀光車行人避撞預警等級,考慮了制動過程中觀光車與行人的相對速度、相對減速度及相對距離不斷變化,得到觀光車AEB 行人避撞的制動安全閾值,利用AEB 風險評估模型和分級預警算法建立一個針對觀光車在不同工況下避撞行人的預警系統。通過實例計算得到:
(1)考慮觀光車與行人目標物的縱向相對距離及相對加速度的影響,利用TTC 碰撞時間算法建立三個觀光車行人避撞預警等級,觀光車避撞行人的AEB算法更加合理。
(2)根據不同的測試工況,改進的觀光車AEB 行人避撞系統設置了不同的冗余安全距離,得到不同車速下觀光車AEB 行人避撞的制動安全閾值,提高了AEB 系統的穩定性。
(3)根據車輛初速度劃分TTC 的取值范圍和對應等級安全,在不同車速的行駛工況下,觀光車AEB 行人避撞系統的預警模塊均表現正常,在測試過程中并未出現系統錯誤報警的情況,沒有干擾到駕駛員的正常行駛。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19