雙動力系統巷道修復機簡介
2022-06-18 10:33:44鄭寶義
礦山機械 2022年6期
鄭寶義,金 峰,高 生
三一重型裝備有限公司 遼寧沈陽 110027
隨 著礦下巷道內生產活動以及井下動壓力變化的影響,巷道會發生底板起鼓、側面圍巖變形和頂板塌陷等現象,因此,需要及時對巷道進行起底、破巖、擴幫和除渣等修復作業[1]。以往清理底板等作業采用人工或裝載機等非專業機械進行,既費時費力,還會存在修復側面圍巖損傷嚴重、底板成型難以滿足要求的問題。隨著煤礦企業生產的深入,礦井巷道的施工深度不斷加大,礦壓也隨之增加,巷道變形的破壞程度也越加嚴重,煤礦每年投入大量人力物力用于巷道維護工作,造成大量的人力和物力的浪費[2]。
在煤礦現代化生產技術不斷進步的今天,專用井下巷道修復設備得到全面發展以及應用,既提高了巷道修復效率,又增加了作業人員安全性。現有礦用巷道修復機采用電纜連接井下電源或用柴油機帶動油泵和電動機提供動力這 2 種版本。拖電纜的電動版巷道修復機雖然配備有電纜卷筒,可以實現電纜自動收放功能,減少人工勞動強度,但受電纜長度限制,無法實現長距離工作,當工作一段后超出電纜范圍需要更換電源接線點,因而降低了靈活性[3]。柴油版巷道修復機完全取消電纜部件,實現自身提供動力,可以滿足長距離自主行走要求,但柴油機運行噪聲大、污染巷道,在作業時伴隨劇烈振動,嚴重影響工人工作環境。鑒于此,提出一種有別于以上 2 種結構形式的雙動力系統巷道修復機[4-5],既滿足了狹窄巷道內轉場要求,無需受電纜長度限制,同時在工作時接電運行,保證了高強度作業以及環境無污染等要求。
1 雙動力系統巷道修復機功能特點
雙動力系統巷道修復機以礦用防爆動力電池與動力電為雙動力源。行走機構運行時,采用防爆動力電池提供動力,不受電纜長度影響,滿足其長距離行走要求;工作裝置運行時,以井下動力電為動力,滿足高強度工作和環境要求。工作裝置采用三節臂結構,在動臂座處連接回轉減速機、擺動液壓缸以及俯仰液壓缸,能夠實現工作裝置旋轉 180°、左右擺動 35°以及俯仰 15°動作。該巷道修復機還配備挖斗、破碎錘和銑挖機等屬具,可實現破巖、臥底、挖掘以及平整等巷道修復工作。所有屬具接口完全一致,均可采用快速連接器實現快速更換;動力電纜采用電纜卷筒實現自動收放,降低了工人勞動強度。
2 雙動力系統巷道修復機結構
雙動力系統巷道修復機結構如圖 1 所示,主要由雙動力系統、工作裝置、行走機構、操作臺總成、液壓系統和電控系統等部件組成。雙動力系統為整機提供動力,工作裝置是各項動作的主要執行機構,液壓系統保證設備平穩運行,電控系統監測各項指標并及時反饋運行狀態。

圖1 雙動力系統巷道修復機結構Fig. 1 Structure of dual-power system roadway repair machine
2.1 雙動力系統
雙動力系統主要由防爆動力電池、電池控制器、電動機控制器、電池冷卻系統以及電纜卷筒等部件組成。防爆動力電池作為巷道修復機的行走驅動力,驅動整機前進和后退;采用井下電源通過電纜卷筒輸入動力作為工作裝置的驅動力。雙動力系統既滿足了長距離自主行走要求,又滿足了工作裝置高強度工作要求,同時具有清潔高效、充電快速、運行噪聲小、續航能力強以及后期維修量少等特點。
(1) 行走驅動力 防爆動力電池與電池控制器相連,電池控制器用于控制防爆動力電池輸出電能;電動機控制器置于防爆電動機與防爆動力電池之間,用于控制交直流轉換,從而實現驅動交流防爆電動機運作,輸出動力;冷卻系統置于防爆動力電池內部,用于防爆動力電池散熱,以增強防爆動力電池的安全性,延長防爆動力電池的使用壽命。此外,防爆動力電池集成為一體,置于本體上遠離工作裝置的一端,便于拆卸更換,有利于防爆動力電池的維修。
(2) 工作裝置驅動力 井下動力電源通過電纜接入電動機控制器,電機控制器直接驅動防爆電動機輸出動力,作為工作裝置的驅動力。電纜卷筒采用液壓馬達驅動,通過操作桿實現電纜的自由收放,降低了工人勞動強度。巷道修復機在井下修復巷道時,無需行走,與挖掘同時運行,防爆動力電池和動力電源作為并列動力輸出,其切換方式由電控箱內部模塊實現,模塊引出控制線路到操作面板,實現面板控制。雙動力共同驅動 1 套液壓系統,形成并聯單泵的結構形式,節省整機結構空間。巷道修復機前進時,模塊切換到防爆動力電池模式,實現整機行走;工作裝置運行時,切換到動力電源模式,滿足挖掘作業要求。
2.2 工作裝置
工作裝置是雙動力系統巷道修復機的主要工作執行元件[6],主要由擺動液壓缸、回轉減速機、動臂、動臂液壓缸、中間臂、中間臂液壓缸、斗桿、斗桿液壓缸和挖斗等部件組成,如圖 2 所示。它采用獨有的三節臂結構,通過各液壓缸來驅動三節臂,實現不同工作姿態,完成側挖、掏帶式輸送機底以及挖毛水溝等作業。
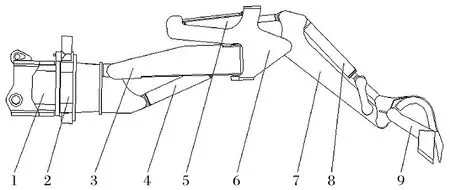
圖2 工作裝置結構Fig. 2 Structure of working device
擺動液壓缸通過液壓油流量的改變實現整個工作臂左右擺動 35°;回轉減速器將直線運動轉化為圓周運動,實現整個工作臂旋轉 180°,擴大工作臂的作業范圍,提高工作臂的使用效率。通過控制動臂液壓缸的伸縮,實現動臂上升和下降運動;通過控制中間臂液壓缸的伸縮,實現斗桿的前后運動;通過控制挖斗液壓缸伸縮,實現挖斗鏟裝的收放動作;挖斗上焊接斗齒座,斗齒安裝在斗齒座上,斗齒是易損件,磨損后可以更換;破碎錘和銑挖機等屬具可通過快換連接器實現快速更換,大大降低更換時間以及工人勞動強度,提高更換效率,充分發揮工作臂的性能。
2.3 行走機構
行走機構是巷道修復機前進的執行機構,主要由推土鏟、行走架、履帶總成、引導輪、支重輪、托架、驅動輪和減速機總成等部件組成,如圖 3 所示。它的行走方式采用履帶型式,確保其通行率;前端有推土鏟,在巷道修復機作業時,支撐地面起到穩定機身作用,同時可用于平整巷道。

圖3 行走機構結構Fig. 3 Structure of walking mechanism
行走架是行走機構的骨架,各部件均安裝于其上。減速機總成內置液壓馬達、平衡閥、減速機和液壓制動器,減速機為行星齒輪減速,在減速機與液壓馬達之間設置液壓制動器,驅動輪通過螺栓連接到減速機外殼上。當液壓系統向行走機構液壓馬達供油時,首先液壓油驅動液壓制動器打開,高壓油驅動液壓馬達轉動,然后液壓馬達通過減速機帶動驅動輪運行,繼而驅動輪帶動履帶總成實現整機的前進和后退;引導輪起導向履帶作用;支重輪將整機重力傳遞到履帶上,同時保證整機沿履帶導軌做直線運動,不發生橫向脫落;托架位于上部中間位置,承載履帶重量,保證履帶合理下垂量,避免前后運動時履帶產生振動;引導輪后部安裝張緊裝置,確保履帶張緊程度適中,避免履帶過緊或過松,履帶過緊會加速其磨損,造成使用壽命降低,履帶過松則容易脫落,影響整機運行。
2.4 液壓系統
液壓系統主要由液壓油箱、液壓泵、多路閥組和先導手柄等部件組成。液壓泵從液壓油箱中抽取液壓油,液壓油經多路閥組流向各執行元件,控制工作裝置中各處液壓缸,完成各種動作。高壓油能量交換后,轉換成低壓油,通過換向閥及過濾器流回液壓油箱,完成循環。液壓先導手柄的控制油由多路閥組提供,保證其使用的安全可靠[7]。
2.5 電控系統
電控系統主要由防爆電控箱、啟停按鈕、瓦斯傳感器、液位傳感器和溫度傳感器等部件組成。防爆電控箱是巷道修復機的核心控制系統,通過內部轉換模塊實現防爆動力電池和井下動力電源輸出自由切換,滿足巷道修復機行走機構和工作裝置的正常運行;同時通過溫度、壓力以及液位傳感器監測設備運行情況,對異常情況及時作出反饋,保證設備平穩運行。
3 結語
雙動力系統巷道修復機采用防爆動力電池和動力電纜 2 種動力系統,既滿足長距離自主行走的工作要求,又滿足工作裝置高強度工作以及環境要求。該機能夠適應井下復雜環境,應用于狹小巷道內,通過更換不同屬具實現多種功能,集破碎、除渣、裝運以及挖槽等功能于一身,真正實現一機多能。同時,其具有結構緊湊、便捷高效、充電快速、運行噪聲小、續航能力強、后期維修量少等特點,作為井下專用巷道修復設備,大大降低了工人勞動強度,解決了煤礦巷道維護、修整的難題,實現了井下巷道修復的機械化作業。