基于自適應位置調節的粒子群MPPT控制方法
2022-06-20 08:24:50游國棟李興韞侯曉鑫趙雙樂
天津科技大學學報 2022年3期
關鍵詞:系統
游國棟,李興韞,馬 元,徐 濱,侯曉鑫,趙雙樂
(天津科技大學電子信息與自動化學院,天津 300222)
太陽能具有安全、環保、資源充足等優點,是一種清潔能源[1].光伏發電是太陽能利用的一種主要形式.隨著光伏發電技術的日益成熟,對發電效率的要求也愈發提高,其中,最大功率點是表征發電效率的一個關鍵指標.然而,在光伏陣列受到不均勻光照時,光伏系統會陷入局部最優狀態,嚴重影響光伏系統對最大功率點追蹤(maximum power point tracking,MPPT)的效率,因此,對最大功率點的追蹤變得尤為重要.
最大功率點追蹤的傳統方法包括擾動觀測法、電導增量法、模糊控制法等.文獻[2]采用直接占空比技術,提出一種變步長擾動觀測法,有利于增強光伏系統的穩態性能,但該方法只在傳統升壓變換器中進行驗證;文獻[3]使用自適應占空比,提出一種改進的電導增量法,在追蹤最大功率點時響應速度快,但運算過程比較復雜;文獻[4]結合模糊控制和粒子群算法,提出一種模糊自適應粒子群算法,提高了最大功率點追蹤精度;文獻[5]通過引入加速度系數,提出一種改進慣性權重的混沌粒子群算法,降低了在最大功率點附近的振蕩.
本文提出一種基于自適應位置調節的粒子群MPPT控制方法.首先,運用Tent映射產生混沌序列,對粒子位置進行更新.然后,賦予粒子反捕食的能力,根據捕食者與粒子之間的距離更新粒子位置;通過改變慣性權重取值,控制粒子的飛行速度,進而控制粒子的搜索能力.最后,給速度添加一個極小的增量擾動,避免出現光伏系統陷入局部最優的情況,當每一代的全局最優解相同時,該算法停止,輸出結果.通過MATLAB仿真,對該算法進行驗證,并與傳統粒子群算法結果進行對比.
1 光伏電池模型
1.1 光伏電池模型及特性
光伏電池是太陽光照射半導體P-N結產生光生伏特效應,將光能轉化為電能的一種裝置.由于單個的光伏電池輸出電壓比較低,在進行光伏發電時采用光伏陣列的形式,將多個光伏電池通過串并聯的形式組成光伏陣列[6].光伏電池的等效電路如圖1所示.
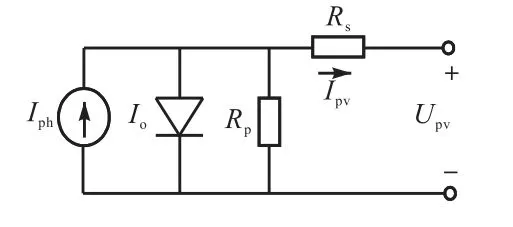
圖1 光伏電池等效電路 Fig.1 Equivalent circuit of photovoltaic cell
電壓電流數學表達模型為
式中:Io為光伏電池內部等效二極管的P-N結反向飽和電流,近似為常數;Iph為光伏電池的光生電流;Ipv、Upv分別為光伏電池的輸出電流、輸出電壓;Rp、Rs分別為并聯、串聯電阻;Q為電子電荷,Q=1.6×10-19C;K為玻爾茲曼常數;T為光伏電池所處環境的熱力學溫度;A為光伏電池內部P-N結的曲線常數.
1.2 不均勻光照情況下光伏電池輸出特性
當光伏陣列受到均勻光照時,其輸出特性曲線中只有一個峰值點.但是,在實際應用過程中,光伏陣列受外界環境(如溫度、輻射照度、云層遮擋等)影響較大,導致光伏陣列的輸出特性曲線有多個峰值點;在采用控制方法進行最大功率點追蹤時,容易將局部最優誤判為全局最優,使系統出現陷入局部最優的情況,降低了發電效率[7-8].光伏陣列在接受均勻光照和不均勻光照情況下的輸出特性曲線如圖2所示.
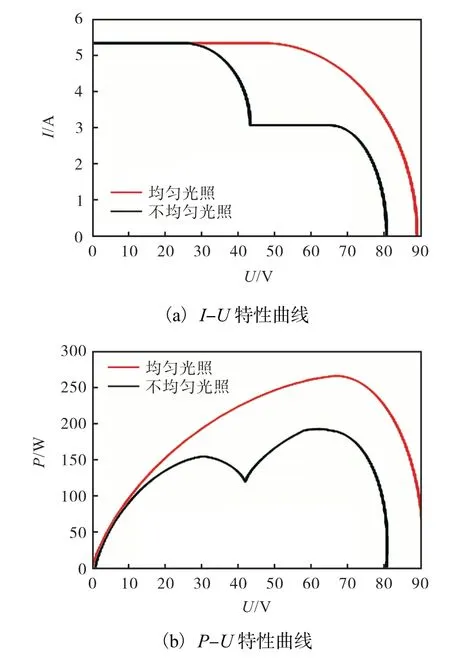
圖2 光照情況下光伏系統輸出特性 Fig.2 Output characteristics of photovoltaic system under illumination
2 粒子群算法及改進算法
2.1 粒子群算法
粒子群算法來自鳥群的啟發,將鳥群中的每一只鳥看作是一個“粒子”,鳥群在尋找食物時,相互交流,傳遞信息[9].在鳥群尋找食物時,會有捕食者進行干擾、捕殺,嚴重影響粒子群的完整性和尋找食物的范圍,因此,粒子群應當有逃避捕食者的能力[10].當有粒子發現食物時,將會傳遞信息,使附近的其他粒子向食物靠近.從起初無序的尋找到最后有目的的覓食,該過程可以看作是一個尋優的過程.粒子群算法中兩個重要的變量是個體最優解(pbest)和全體最優解(gbest).粒子速度vt+1和位置xt+1更新如式(2)、式(3)所示.

式中:t為粒子更新迭代的次數,vt、vt+1分別為粒子在t-1代、t代時的速度,xt、xt+1分別為粒子在t-1代、t代時的位置,ω為慣性權重,c1、c2分別為加速因子,r1、r2分別為[0,1]內的隨機數.
2.2 自適應位置調節的粒子群算法
2.2.1 Tent映射
初始化是粒子群算法的第一步,初始化運用得當,可以提高算法的收斂性[11].本文采用Tent映射對粒子群進行初始化,Tent映射表達式為

隨機產生[0,1]內的初值記為y0,代入式(4)進行迭代,當達到最大迭代次數時,程序運行停止,產生隨機序列.
2.2.2 改進的粒子群算法
為了增強粒子群算法的收斂性能和搜索能力,同時保證粒子的完整性,本文對傳統粒子群算法進行改進.設置粒子的搜索空間為D維,共有N個粒子,可將第i(i=1,2,3,…,N)個粒子在第t代第d(d=1,2,3,…,D)維表示為此處以2維為例,設捕食者位置為(m1,n1),粒子位置為(m2,n2),根據粒子與捕食者的相對距離對粒子位置進行更新,相對距離計算公式為
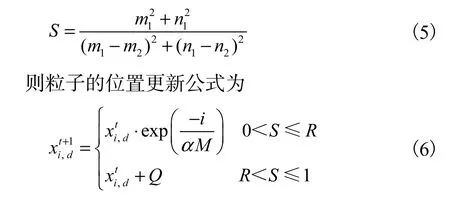
式中:α為(0,1]中的隨機數,Q為一個標準正態分布隨機數,M為最大迭代次數,R為報警值.
粒子狀態如圖3所示.
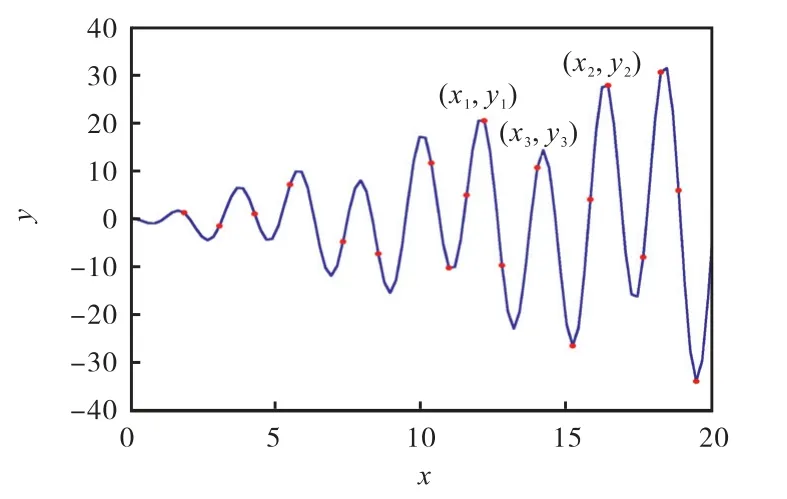
圖3 粒子狀態圖 Fig.3 Particle state diagram

在各個粒子前往聚類中心時,增加慣性權重的取值,提高粒子對局部最優的搜索能力;在各個聚類中心前往全局最優解時,減小慣性權重的取值,提高聚類中心對全局最優解的搜索能力[13].選擇適應度最大的聚類中心作為全局最優解,為了避免粒子群出現陷入局部最優的困境,此時給予速度一個小的擾動,觀察適應度best( )fg 是否變化,然后多次迭代進行驗證.
2.2.3 自適應位置調節的粒子群算法基本流程
(1)設置粒子種群規模N、慣性權重ω、加速因子c1和c2、最大迭代次數M,隨機產生一個y0作為第一個粒子,根據式(4)進行迭代,產生N-1個粒子,初始化速度.
(2)根據粒子和捕食者之間的安全距離,更新各個粒子的位置和速度.
(3)評價各個粒子的適應度,將各個粒子的位置和適應度存儲在pbest中,將所有pbest中適應度最優的位置和適應度存儲在gbest中.
(4)根據適應度,選擇聚類中心,將粒子分為若干個粒子群,并更新慣性權重取值.
(5)對于各個聚類中心,與其前一個最優位置相比較,如果較好,則作為當前的最優位置;比較當前所有的pbest和上一次迭代的gbest,更新gbest.
(6)對此時全局最優解施加一個速度擾動,觀察適應度f(gbest)是否變化,并進行多次迭代驗證.
(7)若達到精度要求或迭代次數,搜索停止,輸出結果,否則返回(3).
3 仿真分析
為了驗證自適應位置調節的粒子群算法的優化性能,現選取6種具有不同特點的基準函數進行比較測試,結果見表1.對f1、f2、f3、f4均采用30維進行測試,對f5、f6分別采用2維和4維進行測試.參數設置為:粒子種群規模N=50;慣性權重增加時ω=0.8,減小時ω=0.4;加速因子c1=2、c2=2,最大迭代次數M=500,粒子速度范圍為[-40,40].粒子群算法(PSO)、麻雀算法(SSA)與自適應位置調節的粒子群算法(APSO)的仿真結果如圖4所示.通過對比仿真結果可知,在不同維數、不同測試函數下,本文所提出的方法具有更好的收斂精度且收斂穩定性較好.
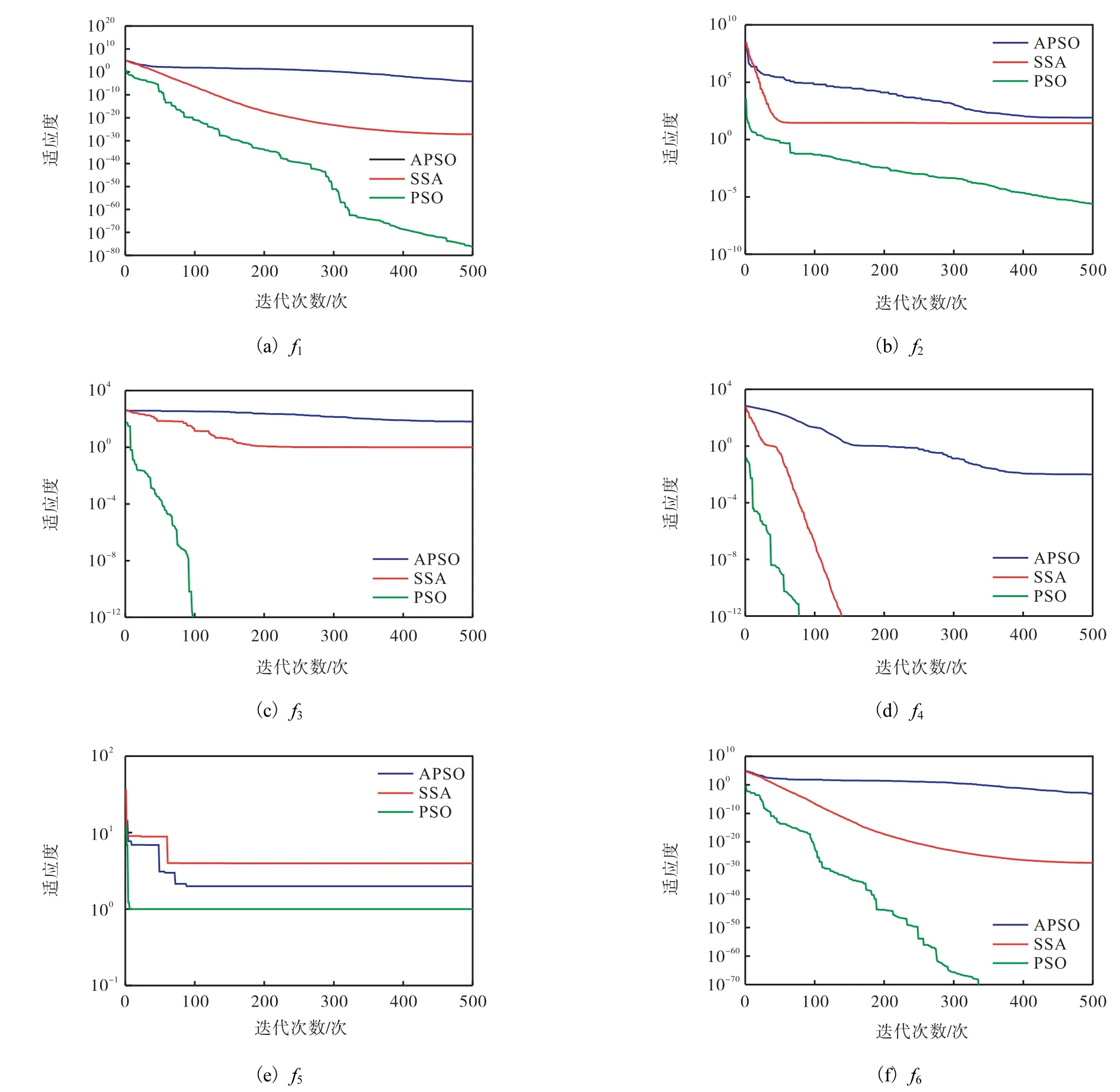
圖4 3種算法的仿真結果 Fig.4 Simulation results of three algorithms

表1 6種基準函數 Tab.1 Six base functions
以光伏陣列輸出電壓為參考電壓,將所有粒子的位置xi作為光伏陣列輸出電壓Ui,飛行速度vi作為對參考電壓的擾動,粒子群的反捕食能力作為光伏系統的抗干擾能力,對提出的方法在MATLAB軟件平臺上進行仿真測試,建立的MPPT仿真模型如圖5所示[14].仿真模型由光伏陣列、BOOST升壓電路、MPPT控制器以及負載模塊組成[15].設置溫度為25℃,輻射照度為1000W/m2,BOOST拓撲的DC-DC電路的頻率為10kHz,MPPT控制器采用基于ATmega16的MPPT控制系統,MPPT控制器控制周期為0.5ms、C1=470μF、C2=220μF、L=2mH.

圖5 MPPT仿真模型 Fig.5 MPPT simulation model
現將3×3的光伏陣列分別進行不同輻射照度處理,第一列輻射照度為600W/m2,第二列輻射照度為800W/m2,第三列輻射照度為1000W/m2.在傳統粒子群算法和自適應位置調節的粒子群算法下,光伏系統輸出功率仿真結果如圖6所示.
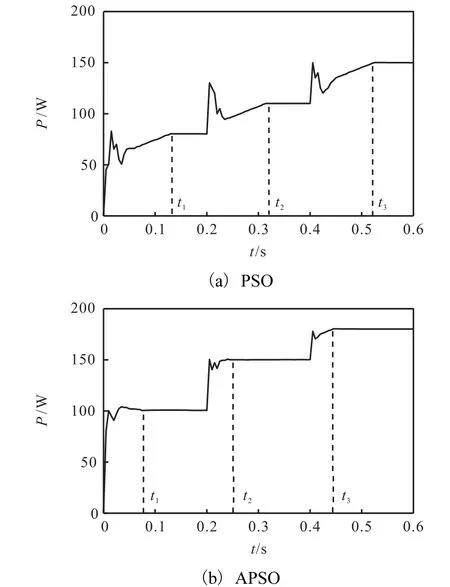
圖6 不同算法下光伏系統輸出功率圖 Fig.6 Output power diagram of photovoltaic system under different algorithms
由圖6(a)可知:采用傳統粒子群算法在輻射照度為600W/m2時,0.13s后光伏系統進入穩定狀態,輸出功率為80W;在輻射照度為800W/m2時,0.32s后光伏系統進入穩定狀態,輸出功率為110W;在輻射照度為1000W/m2時,0.52s后光伏系統進入穩定狀態,輸出功率為150W.由圖6(b)可知:采用自適應位置調節的粒子群算法在輻射照度為600W/m2時,0.08s后光伏系統進入穩定狀態,輸出功率為100W,與傳統粒子群算法相比,輸出功率增加20W,效率提高25%;在輻射照度為800W/m2時,0.25s后光伏系統進入穩定狀態,輸出功率為150W,與傳統粒子群算法相比,輸出功率增加40W,效率提高36%;在輻射照度為1000W/m2時,0.44s后光伏系統進入穩定狀態,輸出功率為180W,與傳統粒子群算法相比,輸出功率增加30W,效率提高20%.
綜上所述,當光伏系統輸出波形逐漸達到穩定時,采用傳統粒子群算法輸出波形畸變程度較大,振蕩幅度較大;當光伏系統輸出波形趨于穩定時,采用自適應位置調節的粒子群算法用時較短,穩態性能更好;光伏系統在不同的輻射照度下,采用自適應位置調節的粒子群算法輸出功率均高于傳統粒子群算法,在輻射照度發生突變時,光伏系統采用該算法輸出功率變化幅度較小.
4 結 論
針對光伏系統多峰值特性,本文提出了一種自適應位置調節的粒子群算法,并通過仿真進行驗證.結果表明:運用Tent映射產生粒子群序列,可提高算法的遍歷性,降低光伏系統在最大功率點處的振蕩;該算法賦予粒子反捕食的能力,可檢測出外界環境對光伏系統的干擾,防止輸出電壓失真;該算法對粒子速度添加一個較小的增量擾動,用于判斷粒子群是否獲得全局最優解,避免光伏系統陷入局部最優狀態.該算法無須選擇變量的最優取值,可以更加快速地實時追蹤最大功率點,在最大功率點附近振蕩較小,提高了光伏系統的發電效率.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32