基于“軌跡坐標(biāo)”的競賽小車凸輪設(shè)計(jì)
2022-06-20 08:24:54梁國棟霍海濤石紀(jì)新
天津科技大學(xué)學(xué)報(bào) 2022年3期
關(guān)鍵詞:設(shè)計(jì)
梁國棟,霍海濤,王 怡,石紀(jì)新
(1.天津科技大學(xué)工程訓(xùn)練中心,天津 300222;2.天津科技大學(xué)教學(xué)質(zhì)量監(jiān)控與評(píng)估中心,天津 300222;3.天津科技大學(xué)機(jī)械工程學(xué)院,天津 300222)
中國大學(xué)生工程實(shí)踐與創(chuàng)新能力大賽是列入《教育部評(píng)審評(píng)估和競賽清單(2021年版)》(教政法廳函〔2021〕2號(hào))的重要賽事[1].大賽里工程基礎(chǔ)賽道中的勢能無碳小車和熱能小車?yán)@障行駛競賽項(xiàng)目,繞障的難度逐屆增加,從早期的“8字形軌跡”“直道S形軌跡”,逐步提高為“雙8字形軌跡”“環(huán)道S形軌跡”,直至2021年的新“環(huán)形軌跡”和新“8字形軌跡”,每次競賽的繞樁難度較上一次都明顯提升,導(dǎo)致繞樁軌跡越來越復(fù)雜.實(shí)際上,軌跡的變化對(duì)于小車的最根本影響是凸輪輪廓的變化.為了設(shè)計(jì)出滿足競賽小車運(yùn)行軌跡要求的凸輪,本文介紹一種基于“軌跡坐標(biāo)”的競賽小車凸輪設(shè)計(jì)方案.文中所述凸輪機(jī)構(gòu)的設(shè)計(jì)方法,能夠全面應(yīng)對(duì)賽題避障軌跡的變化[2],解決有各種避障運(yùn)行軌跡要求的小車凸輪的復(fù)雜設(shè)計(jì)問題,具有很強(qiáng)的適用性.
1 比賽規(guī)則對(duì)設(shè)計(jì)的要求
賽場為5200mm×2200mm 的長方形平面區(qū)域,賽場中間設(shè)有隔板,隔板與邊框之間區(qū)域即為賽道,在賽道中心線上放置有障礙樁(如圖1的運(yùn)行方式示意圖中所示的圓點(diǎn)),障礙樁為直徑20mm、高200mm 的圓棒,障礙樁從出發(fā)線開始按平均間距1000mm 擺放[3].
無論是重錘驅(qū)動(dòng)的無碳勢能小車,還是斯特林發(fā)動(dòng)機(jī)驅(qū)動(dòng)的熱能小車,都有環(huán)道S形、8 字形和綜合3種運(yùn)行方式.其中:環(huán)道S形為在賽道上走S軌跡,如圖1(a)所示;8字形為在賽道上走8字S軌跡,如圖1(b)所示;綜合則為在賽道上交替完成環(huán)道S形和8 字形兩種軌跡運(yùn)行方式[3].
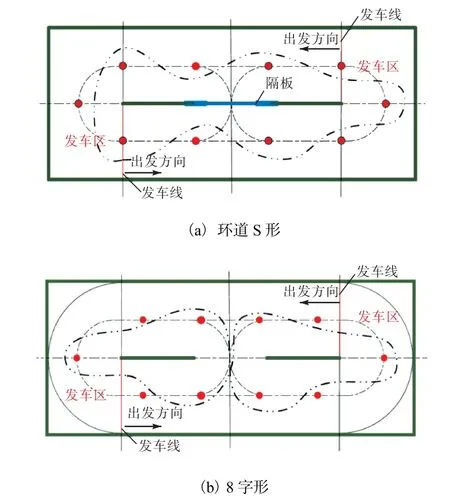
圖1 運(yùn)行方式示意圖 Fig.1 Schematic diagram of running mode
本文以環(huán)道S形運(yùn)行方式的比賽規(guī)則為例,介紹如何利用計(jì)算機(jī)輔助設(shè)計(jì)軟件,通過取得規(guī)劃軌跡上的采樣坐標(biāo),進(jìn)行軌跡上各點(diǎn)曲率半徑的計(jì)算,進(jìn)而獲得凸輪輪廓上各點(diǎn)的坐標(biāo),采用“坐標(biāo)法”開展小車凸輪輪廓設(shè)計(jì).
2 運(yùn)行軌跡的規(guī)劃
對(duì)于2021年賽題設(shè)置的復(fù)雜障礙題目,如果采用傳統(tǒng)方法(設(shè)法找到規(guī)劃軌跡曲線的函數(shù)或者利用幾個(gè)已知函數(shù)曲線拼湊規(guī)劃軌跡并求得軌跡曲率的方法)進(jìn)行復(fù)雜軌跡映射凸輪輪廓線的設(shè)計(jì),將很難完成設(shè)計(jì)任務(wù).一方面,很難找到與規(guī)劃軌跡完全一致的曲線函數(shù);另一方面,為了讓規(guī)劃的軌跡盡可能貼近已知的函數(shù)曲線,就要降低規(guī)劃軌跡的相關(guān)技術(shù)指標(biāo),損失軌跡曲線的優(yōu)化程度.
在三維可視化實(shí)體模擬軟件Autodesk Inventor中,可以在沒有確切軌跡函數(shù)的情況下,按照比賽規(guī)則要求確定的賽道布局圖,進(jìn)行主動(dòng)輪避障運(yùn)行軌跡規(guī)劃和施畫,結(jié)果如圖2所示.在草圖環(huán)境中[4],用鼠標(biāo)從任意一點(diǎn)拉動(dòng)軌跡曲線,在滿足避障約束條件的情況下,不斷調(diào)整各部分軌跡曲線的曲率變化至合適位置,使之盡可能平滑,同時(shí)還要考慮軌跡規(guī)劃的總路徑長度要與主動(dòng)輪的直徑和周長、傳動(dòng)比等小車的主要參數(shù)相匹配.
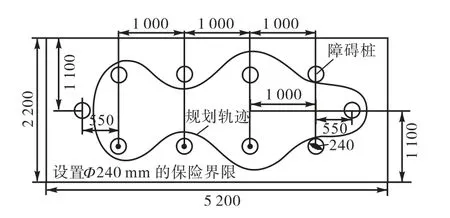
圖2 Inventor中的環(huán)道S形避障軌跡規(guī)劃圖 Fig.2 “S-shape in loop” trace roadmap in Inventor
在Inventor中確定好主動(dòng)輪的運(yùn)行規(guī)劃軌跡之后,將軌跡圖導(dǎo)出為DWG格式,隨后導(dǎo)入到AutoCAD中,再將主動(dòng)輪軌跡向外擴(kuò)展一定距離(主動(dòng)輪與導(dǎo)向輪中心的距離),即得到后軸中點(diǎn)P的運(yùn)行軌跡,結(jié)果如圖3所示.
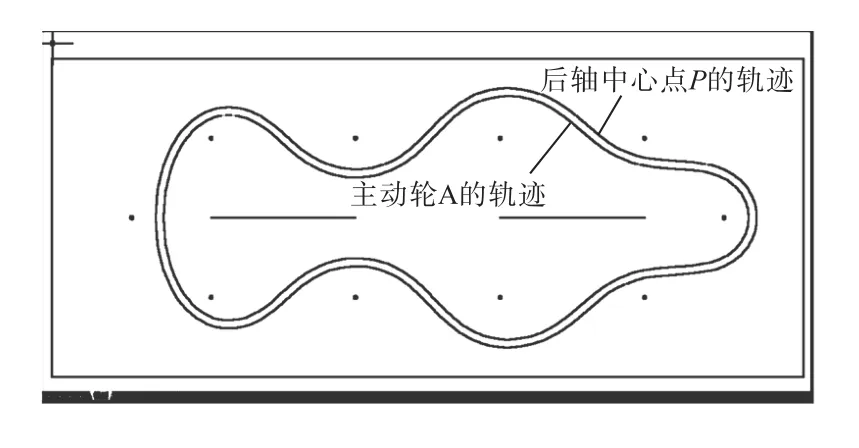
圖3 環(huán)道S形避障軌跡規(guī)劃CAD圖 Fig.3 “S-shape in loop” trace roadmap in CAD
在AutoCAD中的P點(diǎn)運(yùn)行軌跡圖上,等間隔設(shè)置360個(gè)軌跡采樣點(diǎn),通過AutoCAD 中的“數(shù)據(jù)提取”功能,取得并導(dǎo)出每個(gè)采樣點(diǎn)在世界坐標(biāo)系中相對(duì)系統(tǒng)默認(rèn)原點(diǎn)的各點(diǎn)坐標(biāo)[5].采樣點(diǎn)位置坐標(biāo)示例見表1.
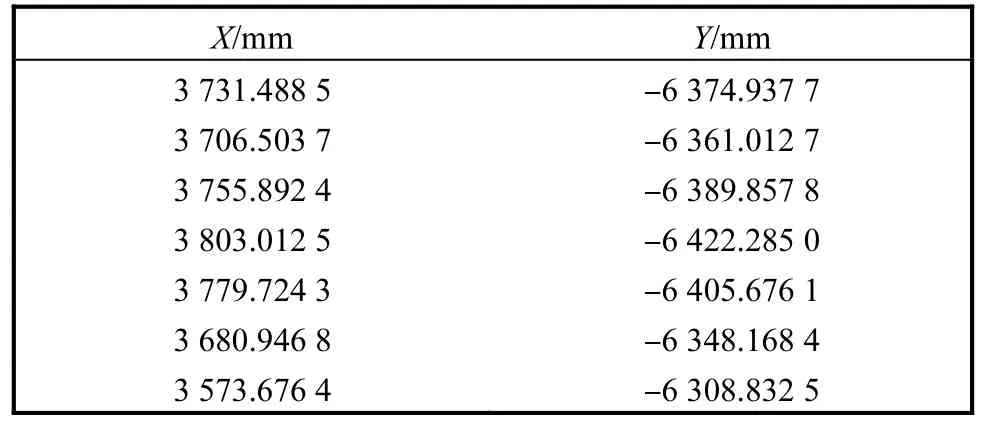
表1 規(guī)劃軌跡上的采樣點(diǎn)坐標(biāo)示例 Tab.1 Example of coordinates of sampling points on the track
3 結(jié)構(gòu)參數(shù)與軌跡參數(shù)的假設(shè)與確定
3.1 小車部分結(jié)構(gòu)名稱與參數(shù)
小車運(yùn)行示意圖如圖4所示.
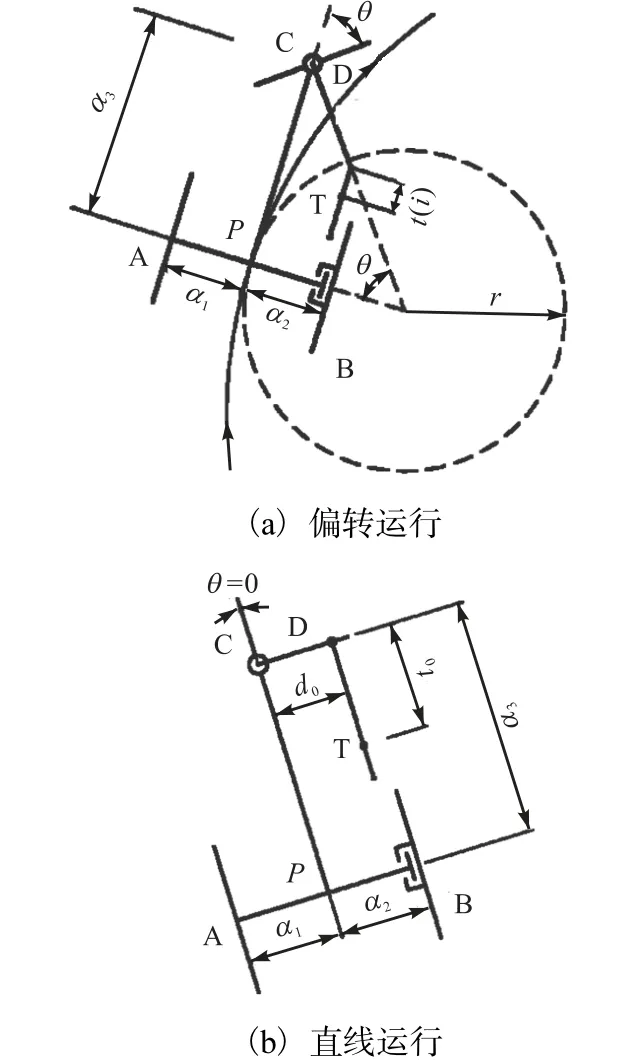
圖4 小車運(yùn)行示意圖 Fig.4 Schematic diagram of running car
圖4中:A為小車的主動(dòng)輪(左后輪);B為小車的從動(dòng)輪(右后輪);C為小車的導(dǎo)向輪(前輪);D為轉(zhuǎn)向桿,轉(zhuǎn)向桿的高度與凸輪的基圓圓心保持水平;T為轉(zhuǎn)向控制凸輪,凸輪設(shè)計(jì)在從動(dòng)輪一側(cè).P為后軸中心點(diǎn);α1為主動(dòng)輪與導(dǎo)向輪中心的距離,α2為從動(dòng)輪與導(dǎo)向輪中心的距離,α1=α2=55mm;α3為導(dǎo)向輪中心與后軸水平中心的距離;θ為導(dǎo)向輪的轉(zhuǎn)向偏角,如圖所示前進(jìn)方向,向右偏轉(zhuǎn)為“+”,向左偏轉(zhuǎn)為“-”;t0為導(dǎo)向輪偏轉(zhuǎn)角為0°時(shí),凸輪基圓中心與導(dǎo)向輪中心的距離,也是凸輪基圓半徑;t(i)為凸輪每轉(zhuǎn)過1°時(shí)的凸輪向徑;d0為導(dǎo)向輪的中心與凸輪厚度中心在X軸方向的距離;r為采樣點(diǎn)處的軌跡曲線的曲率半徑.
3.2 求解轉(zhuǎn)向偏角變量
與小車的運(yùn)行軌跡和轉(zhuǎn)向控制凸輪的輪廓線都有關(guān)聯(lián)的變量是導(dǎo)向輪的轉(zhuǎn)向偏角θ.小車的導(dǎo)向輪的轉(zhuǎn)向偏角θ和運(yùn)行軌跡是一一對(duì)應(yīng)的,同時(shí)導(dǎo)向輪轉(zhuǎn)向偏角θ的偏轉(zhuǎn)大小受到與凸輪和導(dǎo)向輪相連接的轉(zhuǎn)向桿的控制.凸輪向徑t(i)對(duì)轉(zhuǎn)向桿產(chǎn)生的推程與導(dǎo)向輪的轉(zhuǎn)向偏角θ也是一一對(duì)應(yīng)的.因此,轉(zhuǎn)向偏角θ是凸輪設(shè)計(jì)過程中的主要變量之一,由圖4分析可知:

θ=0°時(shí),小車沿直線方向運(yùn)行.
3.3 軌跡曲線任意一點(diǎn)處曲率半徑的求解
在曲線上的某個(gè)點(diǎn)處的微小區(qū)域,可以找到一個(gè)與其曲率相等的圓,該圓的半徑就是曲線上該點(diǎn)處的微小區(qū)域的曲率半徑[6].
也可從微分的角度理解,就是盡可能地把一段曲線微分,直到最后近似為一個(gè)圓弧,此圓弧所對(duì)應(yīng)的半徑即為曲線上該點(diǎn)的曲率半徑[7].
軌跡曲線上每個(gè)采樣點(diǎn)位置都存在曲率半徑r,r是凸輪設(shè)計(jì)過程中的主要變量之一.在取得的360個(gè)軌跡采樣點(diǎn)的坐標(biāo)中,通過依次選取相鄰的3個(gè)采樣點(diǎn)的坐標(biāo),可以計(jì)算出每個(gè)采樣點(diǎn)的曲率半徑.
假設(shè)軌跡上相鄰的3個(gè)采樣點(diǎn)坐標(biāo)分別為(X1,Y1)、(X2,Y2)、(X3,Y3),設(shè)(X2,Y2)對(duì)應(yīng)的曲率半徑為r,對(duì)應(yīng)圓心坐標(biāo)為(X0,Y0),位置關(guān)系如圖5所示.
硅質(zhì)巖中的Al2O3和TiO2可用于判別大陸邊緣沉積環(huán)境,F(xiàn)e2O3可反映大洋中脊組分的影響強(qiáng)度[3]。樣品中SiO2/Al2O3比值為9.82~62.43,比純硅質(zhì)巖(SiO2/Al2O3比值為80~1400)低很多,SiO2/Al2O3比值和Al2O3呈較好的負(fù)相關(guān)關(guān)系(圖2b),且TiO2含量為0.026%~0.386%,Al2O3/TiO2比值為14.69~73.83,與Al2O3具有較好的正相關(guān)關(guān)系,均表現(xiàn)為富鋁特征,表明研究區(qū)有陸源碎屑沉積物[16]。
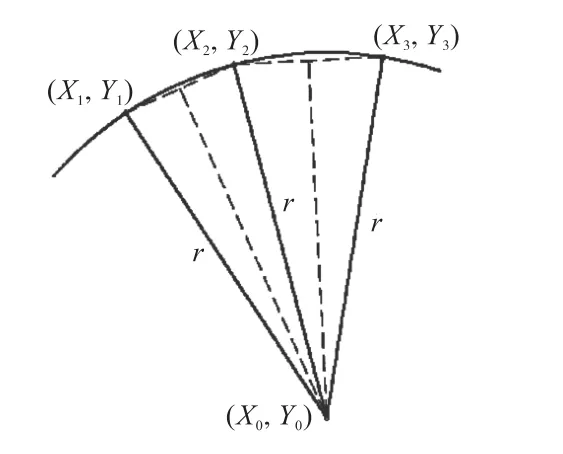
圖5 軌跡上相鄰三點(diǎn)坐標(biāo) Fig.5 Coordinates of adjacent three points on track
依據(jù)圖5中關(guān)系,可列出如下方程:

解這個(gè)方程組可得出圓心坐標(biāo)(X0,Y0)的具體數(shù)值,進(jìn)而可計(jì)算得到曲率半徑r.
由于運(yùn)算量比較大,使用Microsoft Visual C++制作了曲率半徑計(jì)算工具(如圖6所示),應(yīng)用該計(jì)算工具可節(jié)約大量計(jì)算時(shí)間.
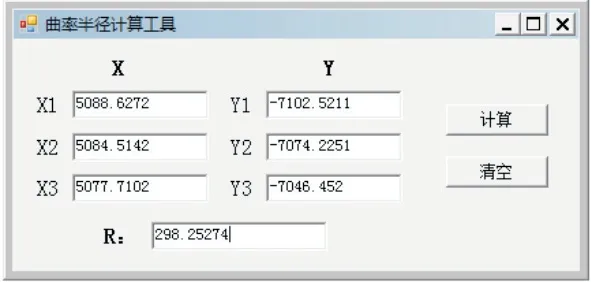
圖6 軌跡采樣點(diǎn)曲率半徑的計(jì)算工具 Fig.6 Radius of curvature calculation tool for sample points on track
將360個(gè)采樣點(diǎn)的曲率半徑計(jì)算結(jié)果按照X坐標(biāo)順序進(jìn)行列表,結(jié)果見表2.
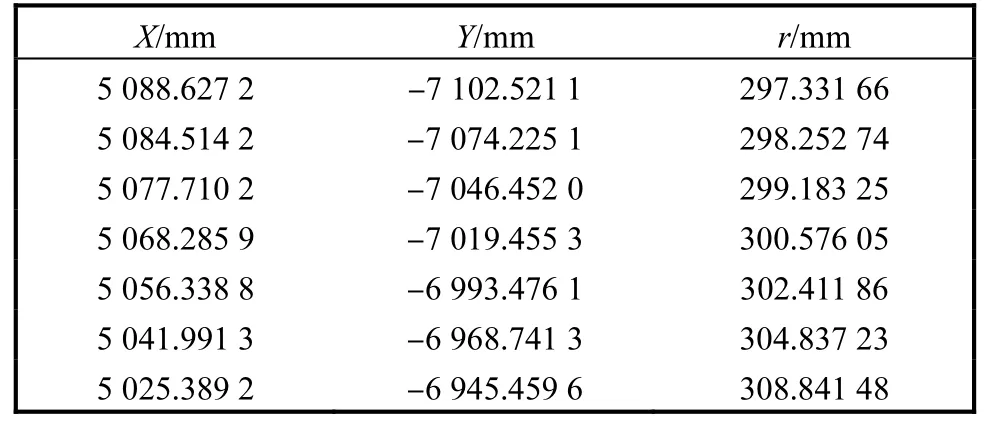
表2 采樣點(diǎn)曲率半徑計(jì)算結(jié)果示例 Tab.2 Example of radius of curvature calculation results for the sampling points
3.4 凸輪坐標(biāo)參數(shù)的確定
凸輪的向徑是凸輪回轉(zhuǎn)中心與推桿之間的距離,也就是凸輪輪廓邊沿上某一點(diǎn)距離凸輪回轉(zhuǎn)中心的長度[8].通過圖4中小車與轉(zhuǎn)向凸輪推桿的受力與運(yùn)動(dòng)狀態(tài)分析和解析計(jì)算,可計(jì)算得到凸輪向徑.

凸輪旋轉(zhuǎn)一圈對(duì)應(yīng)小車行走一個(gè)周期的軌跡,以1°為分度,凸輪每轉(zhuǎn)過1°找到對(duì)應(yīng)軌跡上的一點(diǎn).按照此操作,將凸輪旋轉(zhuǎn)的一周均勻地分成360份,每一份看作1°[2].在一個(gè)周期的軌跡運(yùn)行過程和一個(gè)凸輪旋轉(zhuǎn)周期(0°~360°)中,軌跡上選取的360個(gè)點(diǎn)的坐標(biāo)與凸輪轉(zhuǎn)角的每1°相對(duì)應(yīng).通過確定每1°對(duì)應(yīng)的凸輪向徑,可計(jì)算得到凸輪輪廓上對(duì)應(yīng)點(diǎn)的坐標(biāo)(Tx,Ty).

通過式(5)計(jì)算可得凸輪輪廓上點(diǎn)的坐標(biāo),示例見表3.
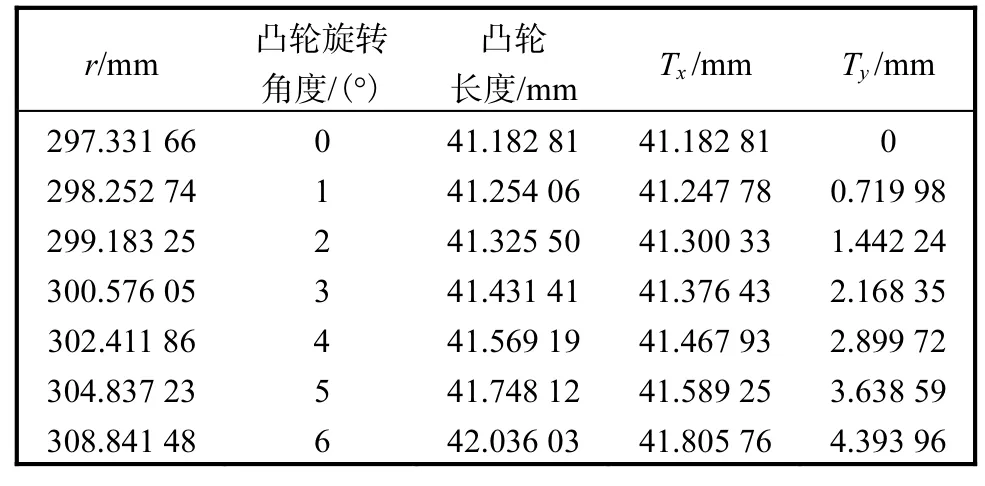
表3 凸輪輪廓上點(diǎn)的坐標(biāo)計(jì)算結(jié)果示例 Tab.3 Example of coordinate calculation resultswith points on cam profile
4 凸輪的生成
將計(jì)算出的凸輪輪廓上點(diǎn)的坐標(biāo)用Excel軟件整理成坐標(biāo)列表,然后導(dǎo)入AutoCAD軟件中,生成凸輪輪廓的二維曲線圖,結(jié)果如圖7所示.
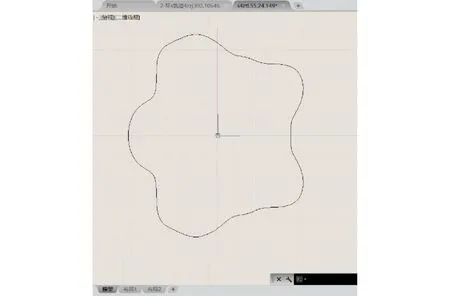
圖7 凸輪輪廓的二維曲線圖 Fig.7 Two dimensional curve of cam profile
將在AutoCAD中生成的凸輪輪廓的DWG文件導(dǎo)入三維軟件UG NX中進(jìn)行拉伸建模[9],生成凸輪輪廓三維建模圖(圖8),該圖可用于凸輪的加工制造.凸輪厚度設(shè)計(jì)為3mm.
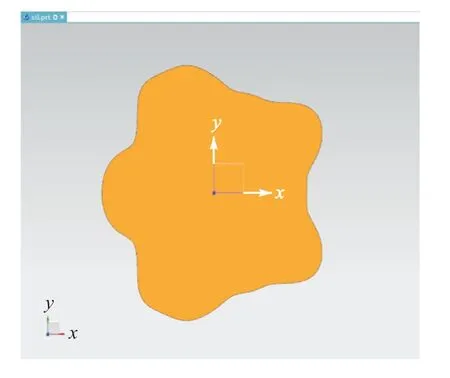
圖8 凸輪輪廓三維建模圖 Fig.8 3D modeling diagram of cam profile
本方案的凸輪輪廓線是依靠映射小車運(yùn)動(dòng)軌跡的方法獲得的.為了保證作為擺動(dòng)從動(dòng)件的推桿的運(yùn)動(dòng)規(guī)律平穩(wěn),在確保小車能夠通過比賽規(guī)則規(guī)定的障礙物的情況下,需要通過采用調(diào)整小車的規(guī)劃軌跡的方法找到一條軌跡,使通過該軌跡映射獲得的凸輪輪廓線平滑無死角.
通過觀察可知,設(shè)計(jì)出的凸輪輪廓線整體沒有出現(xiàn)銳角和直角,內(nèi)外轉(zhuǎn)角均能夠平滑過渡,有利于提高運(yùn)行軌跡與設(shè)計(jì)軌跡的擬合度和推桿的平穩(wěn)運(yùn)動(dòng),設(shè)計(jì)合理.
將本文設(shè)計(jì)的凸輪加工成型,并與其他零件一起組裝成熱能驅(qū)動(dòng)小車,該小車的實(shí)物圖如圖9所示.
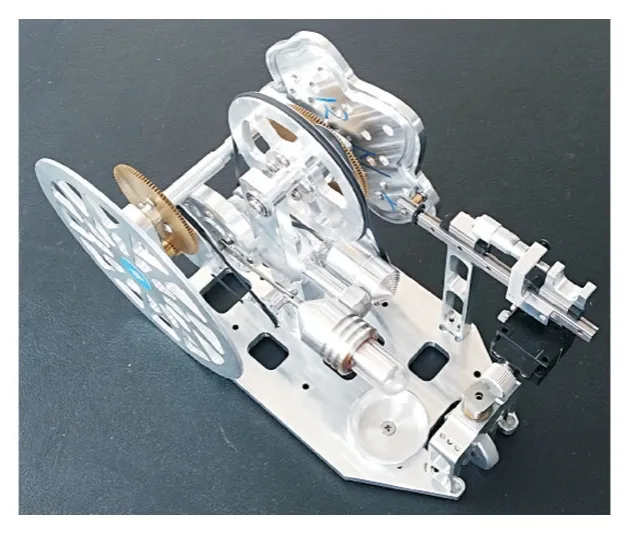
圖9 熱能驅(qū)動(dòng)小車實(shí)物圖 Fig.9 Photo of thermal energy-driven trolley
5 運(yùn)動(dòng)軌跡仿真
將小車的α1、α2、α3、t0、θ、r、S等參數(shù)及坐標(biāo)代入MATLAB程序,對(duì)后軸中點(diǎn)P的運(yùn)行軌跡進(jìn)行仿真,得到仿真軌跡如圖10所示.
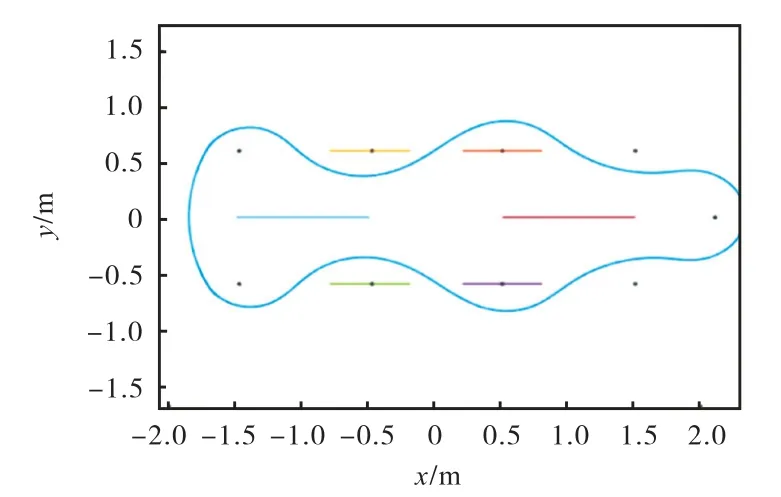
圖10 后軸中點(diǎn)P的MATLAB仿真運(yùn)行軌跡 Fig.10 Simulation of running track for midpoint Pin MATLAB
仿真結(jié)果表明,小車運(yùn)行時(shí)不會(huì)與障礙樁、隔板和邊框發(fā)生觸碰,可實(shí)現(xiàn)有效避障,小車軌跡規(guī)劃合理,參數(shù)選擇適當(dāng).
如果要得到更高的軌跡擬合度,可以采用提高軌跡采樣點(diǎn)數(shù)量和對(duì)應(yīng)的凸輪一周均分份數(shù)的辦法.文中設(shè)計(jì)時(shí)使用的360均分法,無論是在仿真過程中,還是在制作的凸輪的實(shí)際運(yùn)行過程中,其結(jié)果均驗(yàn)證了此數(shù)量能夠滿足使用要求.
6 結(jié) 語
本文以2021年中國大學(xué)生工程實(shí)踐與創(chuàng)新能力大賽基礎(chǔ)賽道的環(huán)道S形運(yùn)行方式的運(yùn)行軌跡為例,利用在規(guī)劃軌跡路徑上的采樣坐標(biāo),采用軌跡中相鄰三點(diǎn)的坐標(biāo)計(jì)算出中間點(diǎn)處曲率半徑,運(yùn)用規(guī)劃、分析、計(jì)算、歸納和仿真等設(shè)計(jì)手段,介紹了一種能夠普遍適用于各種運(yùn)行軌跡的凸輪設(shè)計(jì)方法.該設(shè)計(jì)方法區(qū)別于傳統(tǒng)設(shè)計(jì)思路,綜合運(yùn)用了多種強(qiáng)大設(shè)計(jì)工具軟件中的簡單功能,相互組合接力,解決了小車用于各種避障運(yùn)行軌跡的凸輪的復(fù)雜設(shè)計(jì)問題.采用此設(shè)計(jì)方案制作凸輪的勢能小車和熱能小車,在天津賽區(qū)的競賽中取得了一等獎(jiǎng)的成績.該研究結(jié)果對(duì)于全國性競賽項(xiàng)目中的該類型競賽題目的解答有十分重要的參考意義.該凸輪的設(shè)計(jì)方法,對(duì)于其他機(jī)構(gòu),尤其是帶有凸輪的機(jī)構(gòu),也提供了十分有益的設(shè)計(jì)思路和方向.
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04