基于智能駕駛低速電動車線控制動裝置的設計與應用
2022-06-21 11:27:58羅洋坤
物聯網技術 2022年6期
羅洋坤
(湖南汽車工程職業學院,湖南 株洲 412001)
0 引 言
智能駕駛汽車已成為國內外車輛工程領域重點研究的對象,智能駕駛是一個集環境感知、智能決策、控制技術、路徑規劃、信息融合等技術于一體的高新技術綜合體。智能駕駛電動觀光車作為研究對象之一,使用環境相對簡單,行駛路線相對固定,行駛速度低于15 km/h。目前,在智能駕駛低速電動車領域缺少智能駕駛模式與人工駕駛模式間車輛線控制動裝置的研究,因此,設計一套適用于智能制動與人工制動于一體的線控制動裝置來提高智能駕駛低速電動車制動的可靠性和安全性。
1 線控制動裝置方案設計
智能駕駛低速電動車線控制動裝置的設計方案源于電動車制動裝置的結構及工作原理,因電動車行駛速度低,一般采用碟剎制動方式,即通過液壓泵推動剎車卡鉗從而加緊剎車片實現制動。在不改變原車制動器結構和制動方法的基礎上,結合原車底盤結構特點,增加一套裝置來控制車輛制動。經研究分析,設計在人工模式和智能模式制動中均與制動主軸采用齒輪嚙合傳動的方式進行,與制動主軸配合的人工模式制動機構和智能模式制動機構在ECU控制時擇一在電磁吸合作用下與制動主軸發生嚙合傳動。使制動主軸在同一時期可在電磁吸合的作用下僅能通過人工模式或智能模式實現簡單、快速、可靠的切換制動。線控制動裝置控制流程如圖1所示。
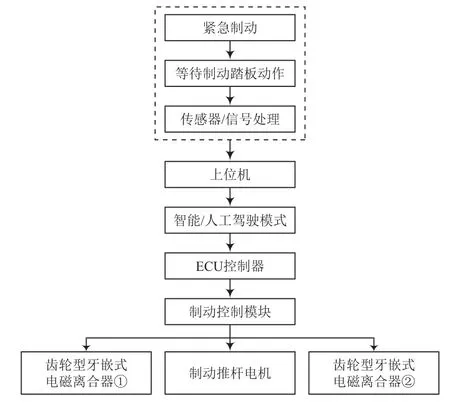
圖1 線控制動裝置控制流程
線控制動裝置能根據上位機控制車輛在人工駕駛模式制動和智能模式制動間切換。工作在其中一模式時,ECU控制器通過CAN總線發送報文指令至制動控制模塊,該模塊根據報文內容控制齒輪型牙嵌式電磁離合器(以下簡稱電磁離合器)。制動推桿電機受控于電磁離合器,如工作在人工狀態時,則不工作;工作在智能駕駛狀態時,則推動制動液壓泵主軸實現線控制動。
2 線控制動裝置設計
2.1 線控制動裝置機械結構設計
智能駕駛電動觀光車線控制動裝置由制動推桿電機、齒輪牙嵌式電磁離合器、電磁式感應傳感器、制動踏板傳動機構、制動主軸齒條、推桿電機齒條、回位彈簧等組成,如圖2所示。
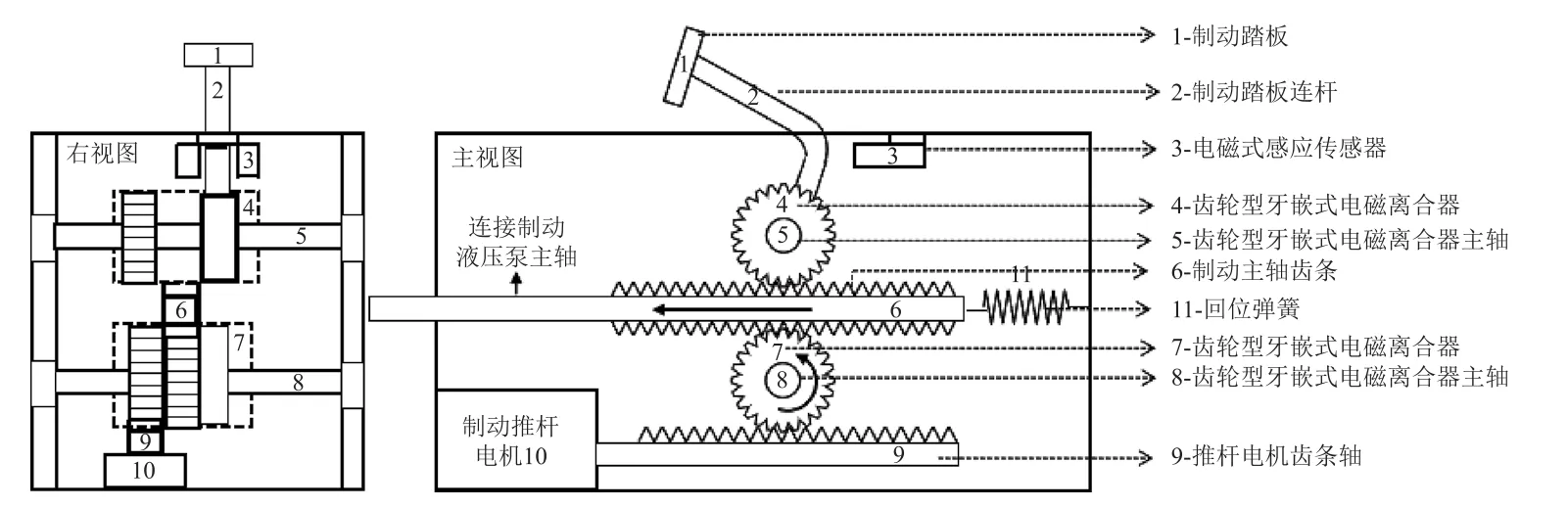
圖2 線控制動裝置結構
2.2 線控制動裝置的工作原理及控制
2.2.1 智能駕駛模式下的線控制動裝置工作原理及控制
低速電動車通過上位機控制進入智能駕駛模式,ECU實時發出報文指令控制電磁離合器處于常閉狀態,主動齒輪與電磁離合器吸合。同時ECU實時控制電磁離合器處于常開,主動齒輪與電磁線圈分離,ECU實時發出指令控制制動推桿電機工作。智能駕駛模式下ECU模塊控制流程如圖3所示。
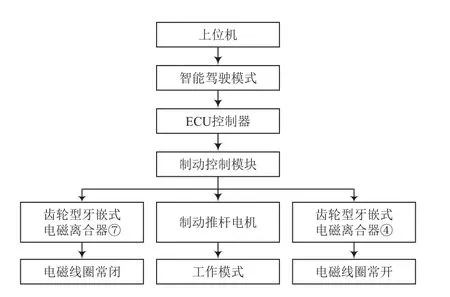
圖3 智能駕駛模式控制流程
(1)制動推桿電機工作原理及控制
智能駕駛模式下推桿電機制動過程:電磁離合器處于常閉狀態,主動齒輪與電磁線圈吸合,推桿驅動電機工作時,電磁離合器雙齒輪同步;推桿驅動電機驅動推桿電機齒條軸向右移動,帶動電磁離合器雙齒輪逆時針旋轉,驅動制動主齒條向左移動;制動主軸齒條克服回位彈簧阻力向左移動;推桿電機齒條軸與電磁離合器,雙齒輪與制動主軸齒條實現1∶1的驅動力和等距傳遞;制動主軸齒條連桿機構推動制動液壓泵主軸實現車輛智能制動,如圖4所示。
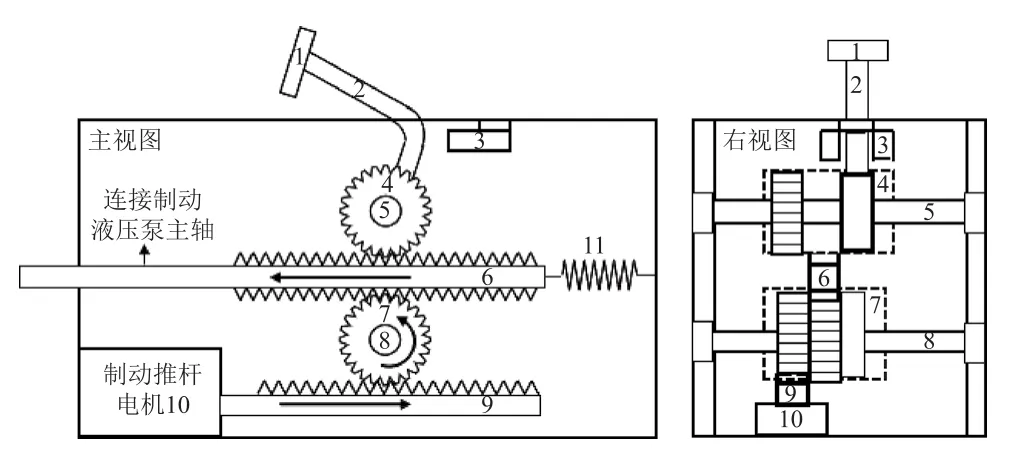
圖4 智能駕駛模式下制動推桿電機制動示意圖
(2)制動踏板傳動機構工作原理及控制
電動車工作在智能駕駛模式,ECU控制電磁離合器處于常開狀態;電磁離合器主齒輪與主軸、制動踏板連桿機構完全分離,無力矩傳遞;制動踏板及制動踏板連桿機構、主軸機械機構處于原位靜止狀態。
2.2.2 人工駕駛模式下的線控制動裝置工作原理及控制
低速電動車由上位機控制進入人工駕駛模式,ECU發出指令控制電磁離合器處于常開狀態,主齒輪與電磁線圈分離,同時制動推桿電機不工作。ECU控制電磁離合器處于常閉,主齒輪與電磁線圈吸合。人工駕駛模式控制流程如圖5所示。
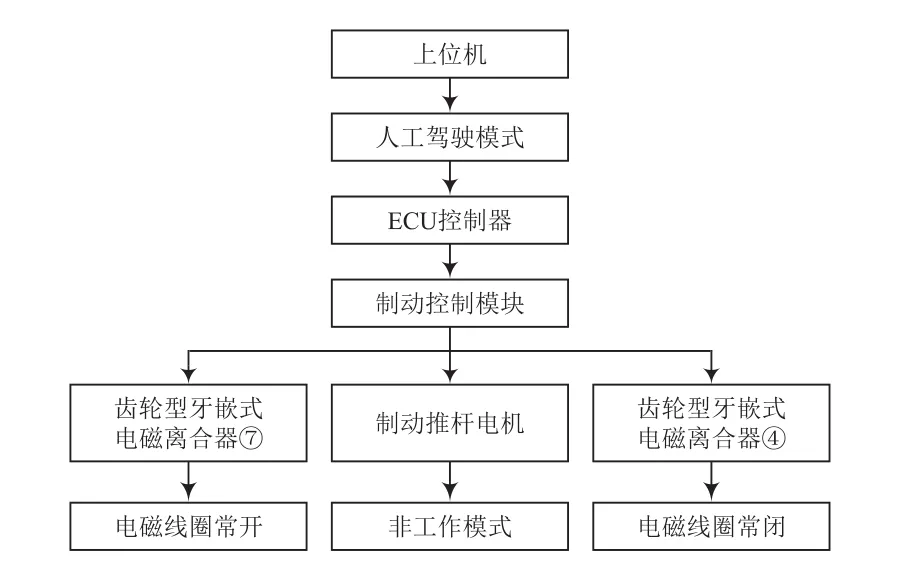
圖5 人工駕駛模式控制流程
(1)制動踏板制動工作原理及控制
當車輛進入人工駕駛模式時,制動踏板工作過程如下:電磁離合器處于常閉狀態,主動齒輪與電磁線圈吸合,當人員踩下制動踏板,電磁離合器與踏板主軸同步順時針旋轉;制動踏板推動電磁離合器齒輪順時針旋轉,驅動制動主齒條向左移動;制動主軸齒條克服回位彈簧阻力向左移動;制動踏板與電磁離合器,主齒輪與制動主軸齒條實現1∶1的驅動力和等距傳遞,如圖6所示。
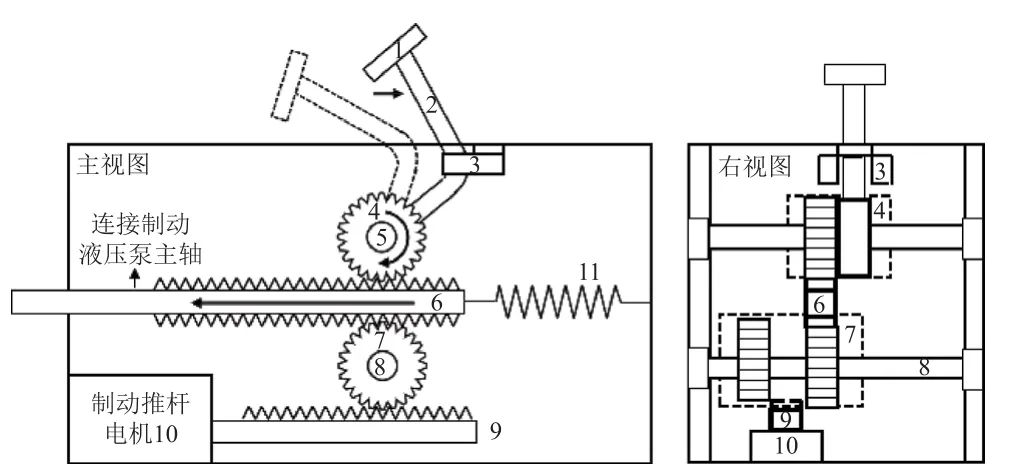
圖6 人工駕駛模式下制動踏板制動示意圖
(2)推桿電機傳動機構工作原理及控制
此時因車輛處于人工駕駛模式,電磁離合器由ECU控制處于常開狀態,電磁離合器主齒輪與制動主軸齒條完全分離,推桿電機齒條軸與制動推桿電機原位靜止。
3 緊急線控制動部件的設計及控制
3.1 緊急線控制動部件設計
制動機構作為底層制動系統的一部分,與車輛的安全運行息息相關。在人工駕駛模式下因車輛故障、失控或其他情況等可以實現緊急制動,而在智能駕駛模式下,當車輛避障傳感器存在盲區或智能傳感器工作異常的情況,車輛無法實現避障或緊急制動,在此情況下需要人工干預,進行駕駛模式切換和立即制動。在緊急制動模式中利用電磁感應特性,經電磁感應及時捕捉制動踏板連桿動作,為ECU進行后續駕駛模式切換提供精準信號,使人工干預及時生效,迅速實現車輛制動,保障車輛在智能駕駛過程中的安全。緊急線控制動流程如圖7所示。
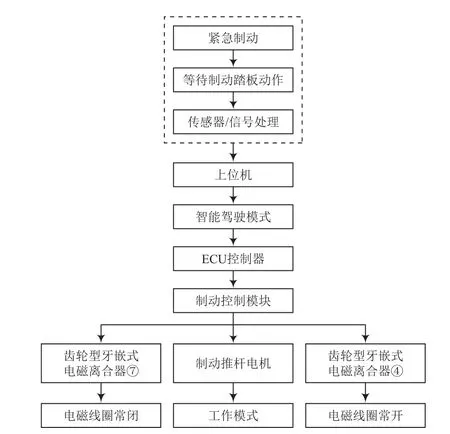
圖7 緊急線控制動流程
3.2 緊急線控制動工作原理及控制
在制動踏板連桿的制動動作路徑中安裝電磁式傳感器,電磁式傳感器整體呈U形,永久磁鐵和信號線圈位于U形結構的兩個端部,電磁式傳感器的U形凹槽可供制動踏板連桿進入和脫出,通過感應制動踏板連桿的進入和脫出動作來為ECU提供駕駛模式切換信號。制動踏板與U形電磁式傳感器工作示意圖如圖8所示。
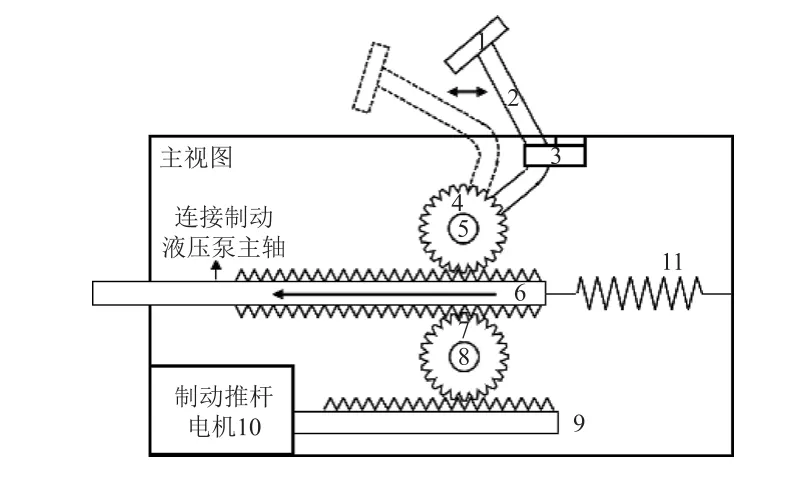
圖8 制動踏板與U形電磁式傳感器工作示意圖
電磁式傳感器可輸出高電平“1”和低電平“0”兩種信號,即智能汽車在智能駕駛模式下時,制動踏板連桿無動作,處于脫出電磁式傳感器的狀態,此時,電磁式傳感器輸出低電平“0”;當車輛工作在智能模式中且遇到需進行緊急制動的情況時,人工踩下制動踏板,電磁式傳感器感應到制動踏板連桿動作,輸出高電平“1”。此時,ECU接收到電磁式傳感器的信號變化,立即解除智能模式制動,并進一步控制制動控制模塊,而制動踏板連桿在進入電磁式傳感器后可立即脫出,電磁式傳感器輸出的信號將由高電平“1”跳轉至低電平“0”。ECU接收到該低電平“0”信號后,制動控制模塊進入人工駕駛模式,電磁式傳感器由ECU控制復位至初始狀態,以保障車輛在緊急狀態下的安全。
4 結 語
低速電動車線控制動裝置設計充分利用了電磁感應特性、電磁的吸合特性及齒輪嚙合的傳動性能,在不改變原車制動裝置的基礎上實現了線控制動在人工模式制動和智能模式制動間的快速、可靠切換。線控制動裝置設計簡單巧妙,不僅能進一步提高低速電動車在智能駕駛中的可靠性和安全性,也推動了線控制動技術在智能駕駛中的驗證和應用,有利于推動無人駕駛汽車智能化技術的發展。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
黃河之聲(2017年13期)2017-01-28 13:30:17
