基于STM32單片機的雙足競步機器人設計
2022-06-21 11:28:08鄧三星楊蒙蒙劉越奇
物聯網技術 2022年6期
鄧三星,楊蒙蒙,張 凱,劉越奇,劉 通
(黃河交通學院 河南省智能制造技術與裝備工程技術研究中心,河南 焦作 454950)
0 引 言
雙足競步機器人是一種模仿人步態行走的機器人,能夠實現雙足行走和其他相關動作,其在直立行走過程中,有著良好的自由度,動作靈活、自如、穩定。雙足競步機器人包含豐富的動力學特性,具有廣闊的發展前景,經過技術的創新與發展,未來它可以在多種場景中廣泛應用,如物品搬運、救災搶險等。
目前市場上的小型雙足競步機器人大致可分為使用傳感器及彈性連接件和不使用傳感器及彈性連接件兩類。使用攝像頭、激光雷達等傳感器增加了機器人的功耗和成本。本文使用單片機、雙軸舵機等,設計了一種小型雙足競步機器人。此機器人在不使用傳感器及彈性連接件的情況下,在6 m的距離內能夠穩定、快速地實現直線行走。
1 系統整體設計
此次設計的雙足競步機器人主要由機械結構、驅動模塊、傳感模塊和控制模塊等組成。機器人控制系統是機器人的“心臟”,它根據編程指令及傳感信號控制機器人完成規定動作。作為機器人的核心,機器人控制系統決定著機器人的性能表現,很大程度上影響著機器人的發展方向。本文設計的機器人系統選用STM32單片機作為雙足競步機器人控制系統。
機器人技術的實現與其優良的機械結構和智能控制系統有關,控制系統要做到工作穩定、精度可靠等,就需要設計高級的控制算法。近年來,國內外相關研究人員提出了多種控制算法,以及實現相關算法的控制器,但目前相關技術還處在實驗階段,一些高級控制方法在實測過程中不夠穩定,因此機器人智能控制系統仍是當前的研究熱點。本文設計并制作了一種雙足競步機器人,它可以按照設定的動作,通過指令程序的編程控制實現如前、后滾翻,前進、后退等動作,并可以快速、穩定地直線行走。
2 機械結構設計
2.1 機械結構參數
雙足競步機器人的機械結構類似于人形,通過雙足結構實現行走。為實現對機器人的步態設計控制,在進行機械結構設計時,通過雙軸舵機模擬人類腿部膝關節。機械結構通過舵機控制芯片控制機器人腿部各關節的動作,對每一步的大小、快慢、幅度實現了精確控制。此機器人選用亞克力板材料制作,成品機器人身高約25 cm,長度約20 cm,寬度約11 cm。
2.2 機器人模型建模
通過大量研究人體腿部運動的圖片、視頻、相關數據,確定了機器人的結構尺寸。并通過大量仿真與實驗,最終確定了機器人的原始模型,根據比例縮放后得到最終的機械結構。借助Solidworks三維繪圖軟件繪制三維模型,如圖1所示。
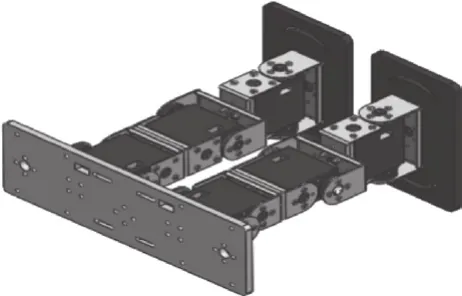
圖1 機器人三維模型
2.3 機器人實物制作
制作夾件、卡件和連接件時,依照圖紙參數通過3D打印機加工完成。然后進行打孔、螺絲裝配等精加工操作,最終完成機器人機械機構的制作和裝配。機器人能夠獨立完成行走或其他任務。設計的雙足競步機器人依靠多關節配合行走,其兩條腿的關節通過6個舵機模擬人的行走動作。在進行腿部的框架設計時,充分參考了雙軸舵機的尺寸參數,使電機的活動范圍盡可能匹配腿部各關節的活動范圍。通過采用多關節型結構可以實現平地前、后以及側面行走,左、右方向的轉彎,攀爬臺階、斜坡等功能。機器人實物如圖2所示。
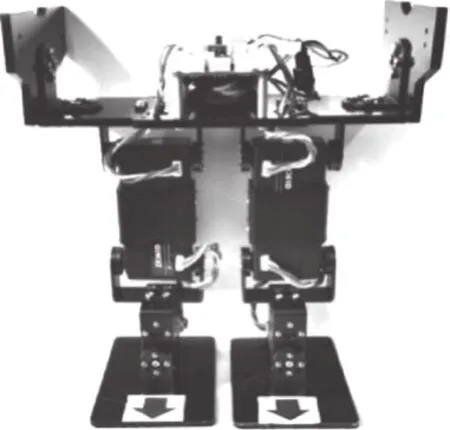
圖2 機器人實物
3 硬件設計
3.1 控制電路設計
雙足競步機器人控制部分采用的核心處理器為STM32F103RCT6型單片機。圖3為單片機工作的最小系統,它主要由STM32F103RCT6單片機、晶振與復位電路組成,其中,晶振為32.768 kHz。
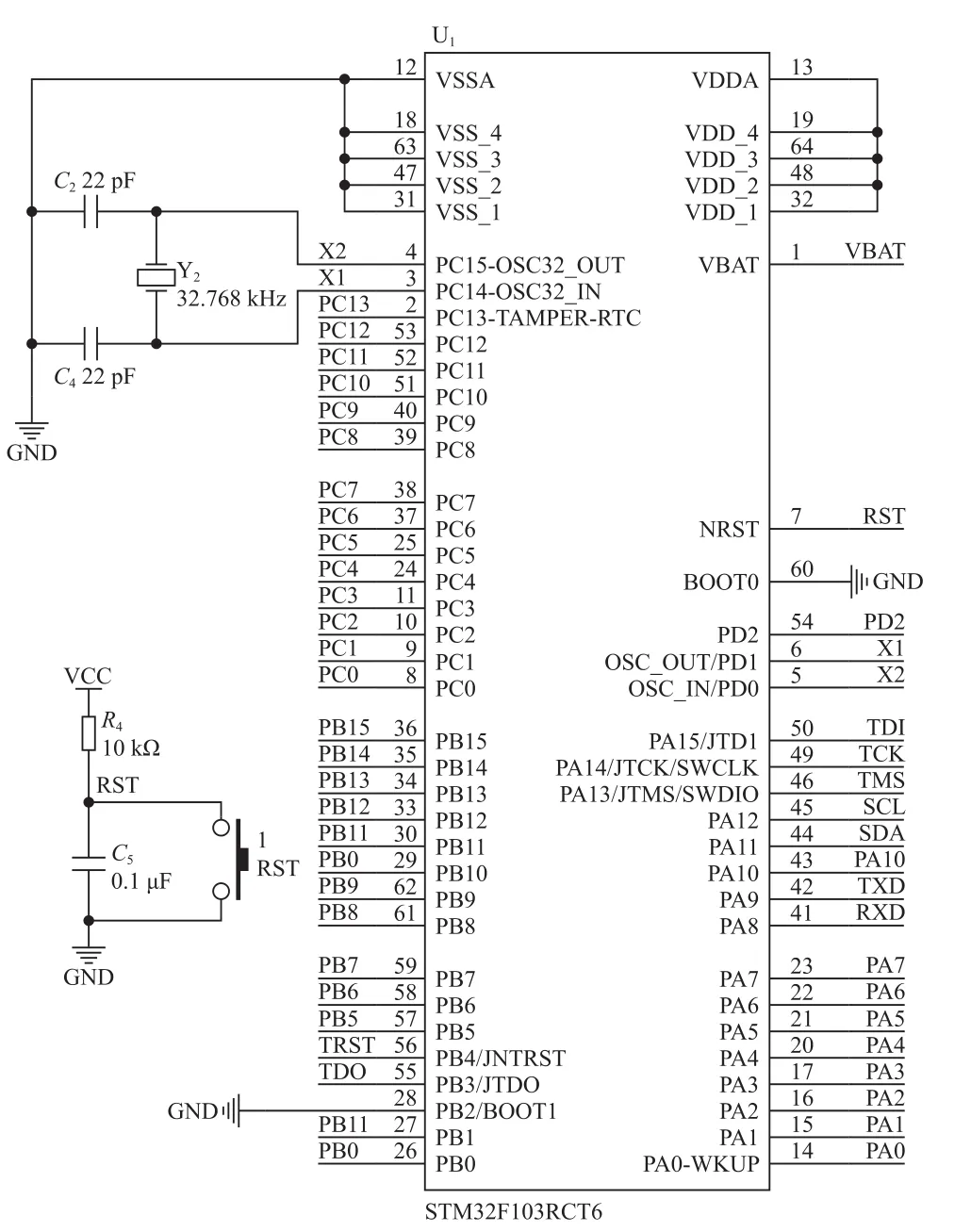
圖3 STM32F103RCT6最小系統
舵機控制電路主要由PCA9685PW芯片組成,通過時鐘線SCL和數據線SDA與STM32單片機通信。舵機控制電路如圖4所示。
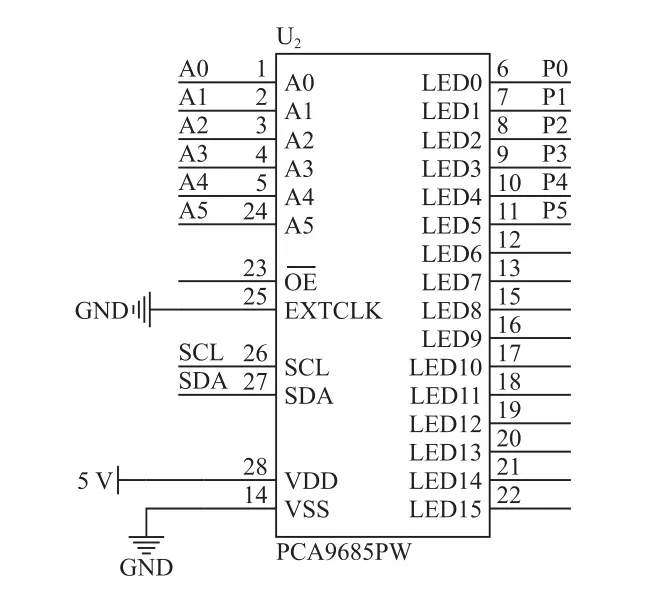
圖4 舵機控制電路
舵機控制電路的P0~P6口分別與6個舵機的PWM信號線相連,以不斷輸出PWM波形,控制6個舵機的旋轉角度,最終實現雙足競步機器人姿態的控制。舵機控制接口電路如圖5所示。
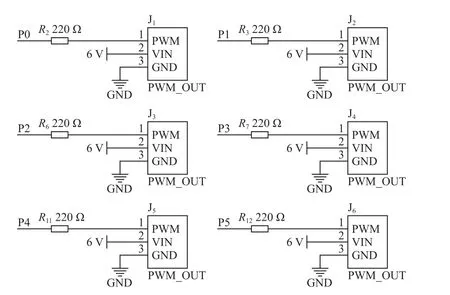
圖5 舵機控制接口電路
3.2 電源設計
通常出于安全和續航等因素考慮,機器人的工作電源采用7.4 V鋰電池,它可以向控制系統和舵機提供7.4 V工作電壓。而控制系統與舵機的電源要分開供電,避免舵機供電電源產生的電壓波動對控制系統產生干擾。控制系統將鋰電池提供的7.4 V電源經LM2940芯片穩壓后輸出5 V電源作為工作電源,而舵機可以直接使用鋰電池提供的7.4 V電源。電源轉換電路如圖6所示。
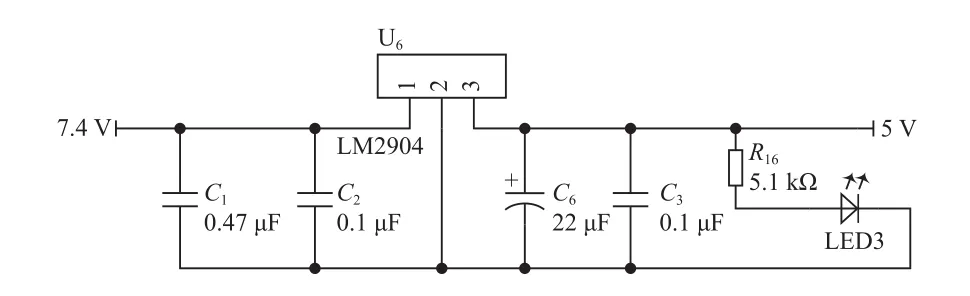
圖6 電源轉換電路
3.3 舵機的使用及參數
本文設計的雙足競步機器人重量輕、體積小,腿部各關節通過舵機驅動實現精確的步態控制。舵機最早應用于航模運動中,通過調節發動機和各控制舵機以控制飛行器的飛行姿態。
舵機分為單軸舵機和雙軸舵機,型號分別為DS3115MG和RDS3115MG。單軸舵機在智能小車、機械臂等設備上使用較為廣泛,而雙軸舵機與單軸舵機的不同之處在于它有一個虛軸,因此常用于人形機器人,如雙足競步機器人。雙軸舵機外觀如圖7(a)所示,單軸外觀如圖7(b)所示。

圖7 舵機實物
舵機各參數是決定機器人性能的重要指標。本次設計使用的舵機的額定工作電壓為6 V,額定扭矩為15 N·m。它提供180°內可控制正反轉、270°內可控制正反轉、360°內可定圈連續旋轉及正反轉、360°內定時連續旋轉及正反轉等8種角度工作模式,用戶可自由切換。舵機采用單總線通信,其波特率為115 200,通過總線串聯各舵機。本設計中的6個舵機有專屬ID號,舵機默認ID為0,可通過命令改變舵機ID,255代表廣播地址。可回讀角度參數,讀取舵機當前實時位置。
4 軟件設計
4.1 機器人系統控制原理
上位機編程軟件和STM32舵機控制器之間進行實時雙向通信傳輸,STM32舵機控制器發送控制指令給串行總線舵機并實現舵機姿態的角度回讀。STM32單片機也可將編寫好的程序下載到芯片中脫機運行。機器人控制流程如圖8所示。
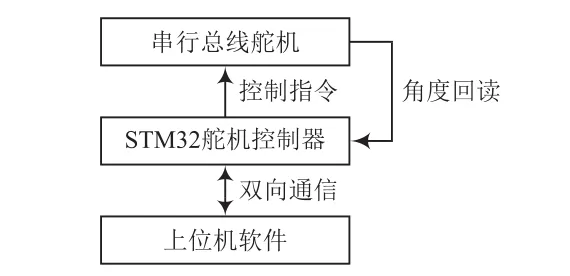
圖8 機器人控制流程
4.2 串行總線舵機通信原理
本文設計的機器人控制系統采用單總線通信方式,這種方式的優點是舵機之間可串聯,最多可級聯255個舵機。同時它可以進行角度回讀,并進行多角度模式切換。舵機內部只帶有一塊主控芯片,且其內部已完成PWM控制,因此用戶只需編寫一條簡單命令即可實現舵機的控制,操作簡單、快捷。串行總線舵機通信流程如圖9所示。
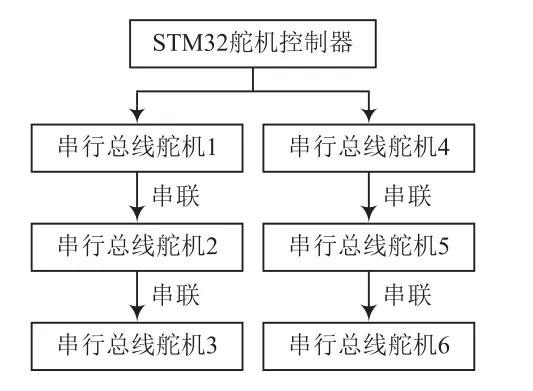
圖9 舵機通信流程
4.3 STM32舵機控制器控制算法
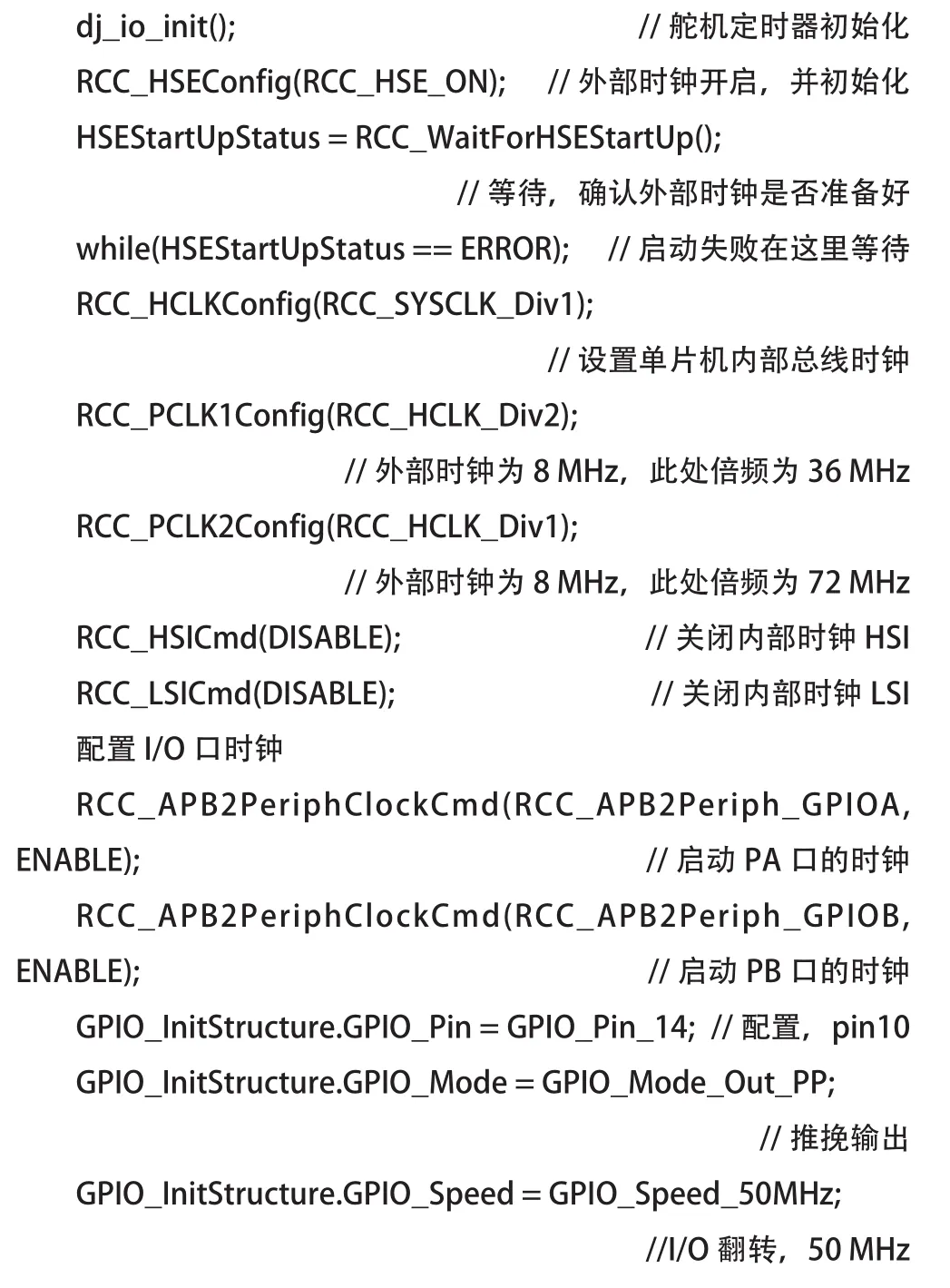
雙足競步機器人STM32舵機控制器的控制算法,可實現LED燈亮滅及閃爍功能,實現蜂鳴器鳴叫與多個舵機聯動控制,并做一些組合動作。如下所示為啟動代碼,用于完成時鐘配置。
5 系統調試
5.1 雙足競步機器人自由度的確定
設計雙足競步機器人最重要的工作是確定自由度的合理配置。首先,結構重心右移,此時右腿支撐地面,左腿輕微抬起,然后左腿平穩放下,重心轉移到雙腿中間,接著結構重心左移,此時左腿支撐地面,右腿輕微抬起,然后右腿平穩放下,最后重心再次轉移到雙腿間。機器人每條腿獲得3個自由度,故2條腿共有6個自由度。髖關節、膝關節和踝關節的俯仰自由度協作配合,使機器人在前進方向上實現直線行走;髖關節的轉體自由度可控制機器人轉彎功能的實現;髖關節和踝關節的偏轉自由度協作配合,可實現在橫向平面內的重心轉移。
5.2 控制板簡介
舵機控制模塊采用STM32舵機控制板,其主要由STM32F103RCT6單片機芯片、舵機控制電路、USB調試接口、藍牙接口、無線串口、電源接口、蜂鳴器、舵機接口組成。STM32舵機控制板如圖10所示。
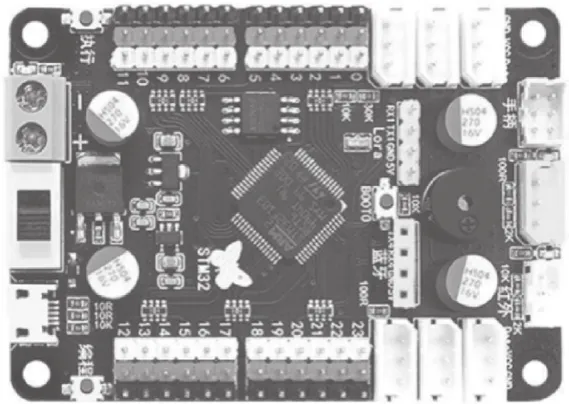
圖10 STM32舵機控制板
5.3 調試界面
控制板使用上位機軟件控制,可直接使用USB接口,藍牙模塊和無線串口進行調試或下載編程。系統既可實現機器人開機狀態的設置,直接使用在線運行模式控制機器人的運動,也可以將程序燒錄到STM32單片機中實現脫機運行。通過重啟控制器可以清除控制器中燒錄的程序,實現機器人復位。在調試過程中還可以實現多個機器人協同運行,做出統一動作。調試界面如圖11所示。
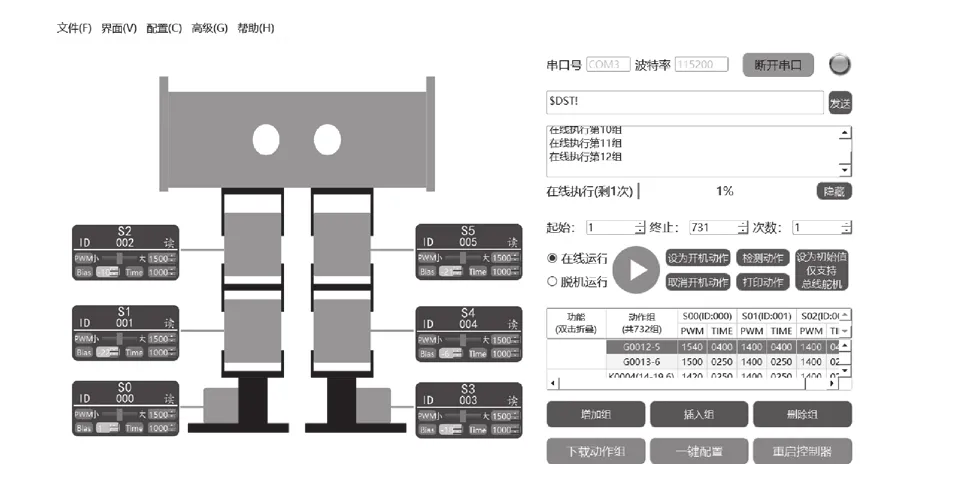
圖11 調試界面
5.4 調試結果
先將控制程序燒錄到STM32控制器中,機器人通過自動脫機運行程序,逐步完成設計動作。經過硬件調試,本文設計的雙足競步機器人可以實現前后方向走步、前后方向翻跟斗、向左及向右轉動等功能。如圖12所示,機器人正在跑道上進行翻滾動作,此時機器人頭部朝下,腳部朝上。
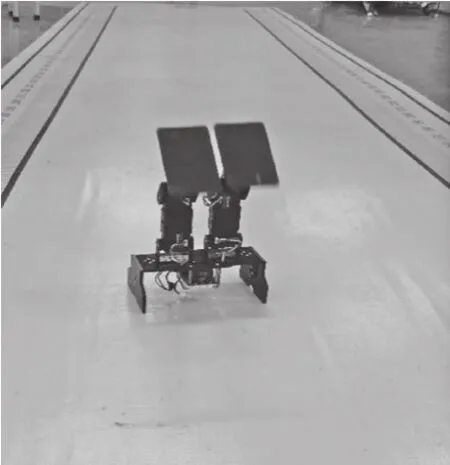
圖12 調試結果
6 結 語
本文采用STM32F103RCT6單片機作為控制器,開發設計了雙足競步機器人系統。首先確定了系統總體結構和組成,然后對雙足競步機器人的機械結構、舵機控制系統和上位機編程軟件進行了設計與測試。在不使用彈性連接件、傳感器的情況下,經過調試,機器人能夠滿足前行、后退、轉彎、翻跟斗等基本動作要求。該機器人結構穩定,可靠性高,動作轉變協調性好,運行效果良好。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:47:44
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
制造技術與機床(2017年6期)2018-01-19 02:41:21
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
