新型微光機電系統慣性測量技術研究進展
2022-06-23 08:23:42黃勇軍李昕蔚吳江波陳鼎威文光俊
導航定位與授時 2022年3期
關鍵詞:測量
黃勇軍,李昕蔚,吳江波,閆 興,陳鼎威,李 建,文光俊
(電子科技大學信息與通信工程學院,成都 611731)
0 引言
微慣性測量技術是指利用微納尺寸的慣性傳感器件,對運載體的加速度、角速度等慣性參數進行測量的技術,其在產品級應用的主要表現形式是基于微機電系統(Micro Electro Mechanical System,MEMS)的微慣性測量單元(Micro Inertial Me-asurement Unit,MIMU)。MEMS MIMU是微慣性導航技術的核心,同時也是微定位導航授時(Micro-technology for Positioning, Navigation and Timing, μ-PNT)技術的重要組成部分。而PNT技術可以彌補全球導航衛星系統(Global Navigation Satellite System, GNSS)信號脆弱性的不利影響,實施全空域目標的PNT服務是國家級的戰略技術,已受到各個國家的高度重視。美國于2005年開始研究PNT系統,并在2010年發布了PNT系統實施計劃,目標是“發展獨立于全球定位系統(Global Positioning System,GPS)的綜合性國家PNT系統,預期在2025年前后為美國提供更高效的PNT能力”;中國則提出以北斗系統為核心,計劃于2035年前建立和完善一個更加普遍化、集成化和智能化的綜合PNT系統,旨在為全球用戶提供更統一、更準確、更可靠的時空信息服務。在綜合PNT系統中,慣性導航技術是一種不依賴外部信息,也不向外輻射能量的自主式導航系統技術,早已滲透到人類生活的方方面面,小至智能手機、機動車、機器人、無人機,大至飛機、導彈制導等領域,而這都離不開基礎的IMU技術的發展,因此相關研究是十分有必要的。
IMU根據其在慣性導航應用場景中的性能和精度需求進行分級,可分為戰略級、導航級、戰術級和消費級,如表1所示。傳統的MEMS MIMU主要集中在消費級和戰術級,目前世界上精度最高的MEMS MIMU 已突破導航級,但受制于校準方法和各類電學噪聲、熱噪聲以及分辨率極限等,很難再進一步提高性能。近年來,微光機電系統(Micro Opto-Electro-Mechanical System,MOEMS)技術得到快速發展,特別是其中基于腔光力系統技術的發展,使該問題有了新的解決思路。
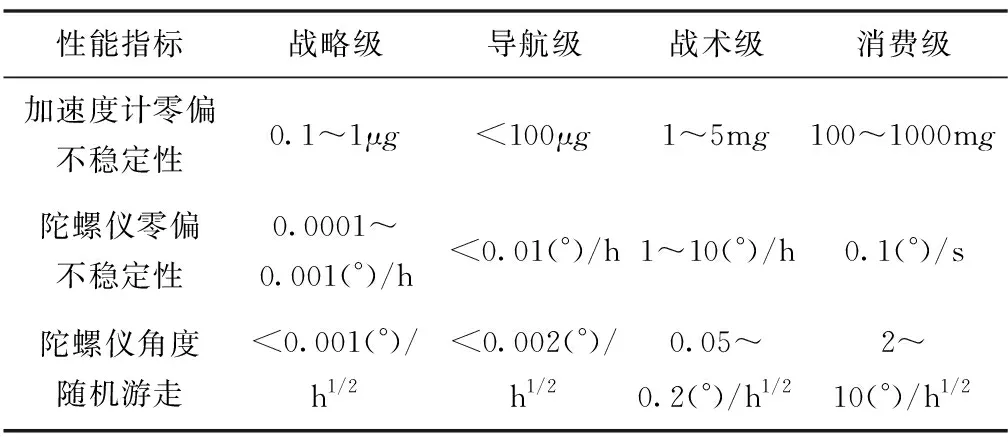
表1 慣性測量單元性能等級分類[9]
鑒于此,本文對近年來微慣性測量技術方面的研究進展進行了綜述,并對未來可能出現的新型MIMU技術進行了展望。本文的主要框架如下:第一部分介紹了MEMS MIMU,分析了其存在的問題,并提出了解決方案;第二部分介紹了MOEMS 加速度計、陀螺儀等新型慣性傳感器,特別是基于腔光力系統的加速度計和陀螺儀的最新研究成果,提出了將腔光力系統用于設計MIMU的構想;第三部分介紹了基于壓縮光源的量子增強型傳感技術,并提出了一種使用壓縮光源以進一步降低腔光力系統噪聲的創新思路。
1 MEMS微慣性測量技術
在各式各樣的MIMU中,MEMS MIMU因體積小、質量小、成本低、功耗少而占據大量市場,被廣泛應用于定位與導航等眾多場合,如智能手機導航、城市環境定位、汽車自動導航、行人室內導航等。MIMU一般由正交的三軸加速度計和三軸陀螺儀構成,很多情況下也會使用三軸磁力計提供輔助信息。其中微加速度計可以測量運載體的加速度,陀螺儀可以測量運載體的角速度。兩者結合,根據陀螺儀輸出建立導航坐標系,根據加速度計輸出解算出運載體在導航坐標系中的速度和位置,所形成的系統便是慣性導航系統(Inertial Navigation System,INS),進而可以與GNSS集成,提供低成本的導航解決方案。
2021年,K.Borodacz等對2020年上半年的IMU市場進行了綜合調研,得出目前MEMS MIMU雖占據大量市場,但其性能仍無法滿足高精度的技術需求。隨著軍事武器等領域對MEMS MIMU性能的要求越來越高,如何提高其精度將是科研工作者們接下來要關注的難題。近年來,專家學者們提出了諸如校準算法、旋轉調制技術、去噪方法等方案,以試圖在不同程度上提高MEMS MIMU的性能,現階段部分MEMS MIMU技術已實現導航級性能。例如,2020年S.Zotov等對美國SDI(Systron Donner Inertial)公司的SDI500 IMU產品中的陀螺儀進行重新設計(如圖1(a)所示),并改進前端電子器件以優化噪聲參數,最終得到陀螺儀的角度隨機游走(Angle Random Walk, ARW)優于0.001(°)/h,零偏不穩定性約為0.005(°)/h,達到導航級性能。同年,中國研制出一種新型高精度MEMS IMU,其產品圖和結構圖如圖1(c)、圖1(d)所示,其角度隨機游走達到0.003(°)/h,零偏不穩定性達到0.006(°)/h,代表當時商用空間應用的最高精度MEMS IMU。2021年,Honeywell公司基于HG1930 MEMS IMU進一步開發了HG7930 MEMS IMU,產品圖如圖1(b)所示,實現了約1個數量級的性能提升,其角度隨機游走達到0.0035(°)/h。然而,受制于校準方法和分辨率極限,特別是各類電學噪聲、機械熱噪聲(如式(1)所示),導致MEMS IMU的進一步提升空間很小,而且再度提升也將導致其失去低成本的優勢。

(a)

(1)
2 MOEMS和腔光力慣性測量技術
2.1 MOEMS慣性測量技術
MOEMS技術是將MEMS技術與微光學技術結合而產生的多學科交叉性技術,它兼具兩者的優點,可實現低成本、小型化、可集成、可大批量生產,同時滿足高精度、高靈敏度、高熱穩定性,以及強抗電磁干擾能力的微光學慣性傳感和測量。它可以克服傳統MEMS MIMU基于電容傳感的一些缺點,如輸入加速度引起小電容變化、寄生電容、卷曲效應、易受電磁干擾、窄帶寬等,同時解決了傳統光學陀螺儀尺寸、質量、功耗和成本大的問題,使之轉變為基于MOEMS制造的小型化芯片級器件。將MOEMS技術用于研制新型MIMU中,有望以較低成本大幅提高MIMU產品的性能。雖然當前產品級的MOEMS MIMU還未研制出,但MOEMS微加速度計和陀螺儀方面已有許多成果不斷涌現。
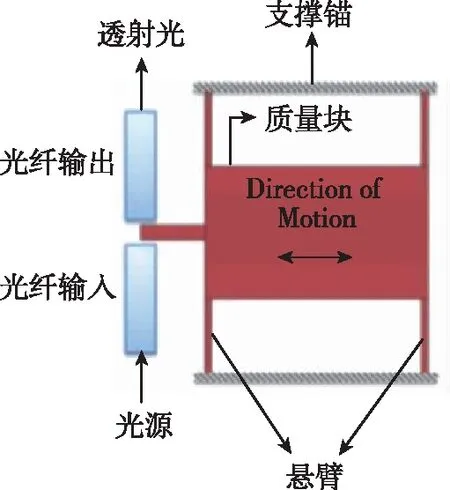
現階段MOEMS微加速度計主要有三種方案。其一是基于光強的幾何光學方案,結構如圖2(a)所示,其中質量塊通過懸掛元件附接到基板,質量塊的凸起部分位于輸入、輸出光纖之間。施加的加速度導致質量塊發生位移,輸出光纖中透射光強度隨之產生變化,據此通過測量透射光強度變化量可得到施加的加速度大小。這種加速度計結構簡單、成本低,一般在m級精度,但對加速度的敏感度差。其二是基于波動光學的方案,加速度計中的質量塊受外部加速度作用發生位移,從而引起激光波長(或頻率/相位)的變化,通過測量該變化量可得到施加的加速度大小。根據光學位移測量單元的形式和測量原理,又可細分為光柵干涉腔、光纖布拉格光柵(Fiber Bragg Grating, FBG)、法布里-珀羅腔(Fabry-Perot cavity)和光子晶體等方法,這類加速度計研究較為廣泛,比第一類更精確,可達到μ級精度,且具有更大的工作帶寬。其三是基于光-物質相互作用的新的光力學/量子光力學方案,如圖2(b)所示,這種加速度計的精度有望達到或超過標準量子極限(Standard Quantum Limit,SQL),目前還在研究發展階段。
(a)
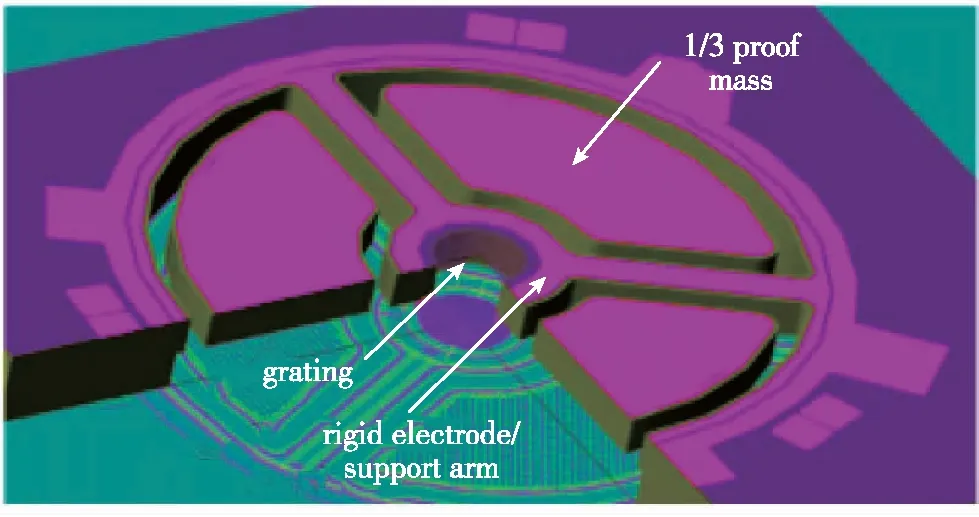
基于光強調制的原理,2008年美國桑迪亞國家實驗室N. A. Hall等提出了一種新型光學微加速度計結構,如圖3(a)所示,檢測電極相對于剛性衍射光柵背板電極垂直移動,以提供在用相干光照射時質量塊位移的干涉檢測分辨率,其加速度探測分辨率理論可達到43.7n/Hz。2012年,加拿大蒙特利爾工程學院K. Zandi等通過集成法布里-珀羅腔以及片上光波導方式,實現了一種高性能光學加速度計,結構如圖3(b)所示,其測試獲得的加速度探測分辨率達到111μ/Hz。2016年,伊朗沙希德·貝赫什提大學A.Sheikhaleh等利用一維(1D)光子晶體,提出了一種基于強度調制的MOEMS加速度計的新拓撲結構,如圖3(c)所示,可用于從消費電子產品到慣性導航的各種應用,具有119.21nm/的機械靈敏度和0.32%/的光學靈敏度。基于類似原理,2019年國內華中科技大學Tang S.等在傳統MEMS加速度質量塊中心刻蝕出一條微縫隙,并通過檢測透過該縫隙的光斑位置因重力加速度變化產生的位移來測量加速度大小,實現了約8.16n/Hz的測量精度。
基于波動光學的原理,2017年浙江大學Lu Q.等提出了一種基于光柵干涉腔的MOEMS加速度計,并進行傳感結構優化,原理如圖3(d)所示,圖中包含一個光柵干涉測量腔和一個由檢測質量、彈簧懸架和支撐結構組成的機械傳感結構,可實現超高靈敏度、低跨軸靈敏度和低頻應用,噪聲水平為185.8n/Hz。2019年,伊朗沙希德·貝赫什提大學M.Ahmadian等基于波長調制,并利用石墨烯的特性,提出了一種高靈敏度、寬帶寬、大線性測量范圍的石墨烯MOEMS加速度計,如圖3(e)所示,光學靈敏度為0.2111nm/,機械靈敏度為0.4617nm/。同年,A.K.N.Shotorban等提出了一種基于微環諧振器的MOEMS加速度計,如圖3(f)所示,該加速度計的機械部分由2個彈簧和1個質量塊組成,微環連接到質量塊上。當對系統施加加速度時微環移動,這會導致下降端口的波長響應發生變化,進而可通過光電探測器進行檢測以測量施加的加速度。該加速度計具有0.0025nm/的光學靈敏度和1.56nm/的機械靈敏度。2020年,中北大學Huang K.等提出了基于一維光子晶體波長調制的新型MOEMS加速度計,如圖3(g)所示,其由4個彈簧連接的可移動檢測質量塊感知振動信號,一維光子晶體系統則可以調制光信號,該加速度計的靈敏度達到2.06nm/。2021年,伊朗沙希德·貝赫什提大學M.Taghavi等基于法布里-珀羅腔,提出了一種雙軸MOEMS加速度計,如圖3(h)所示,外部輸入加速度會導致法布里-珀羅腔在每個方向上的長度發生變化,從而導致干涉儀的輸出光譜發生變化,通過測量頻譜偏移量可以計算出加速度的值和方向,得到的和兩個方向的精度分別為309μ和313μ。同年,我國Yao Y.等提出了一種基于光柵干涉腔的改進型MOEMS加速度計,并對其結構進行優化設計,得到加速度靈敏度約為60V/,噪聲為15n/Hz。
MOEMS陀螺儀由于同時具有高精度、低成本和易于制造的優勢,亦受到國內外學者的廣泛關注。2019年,東南大學Shen X.等提出了一種基于波導微環諧振器的MOEMS諧振陀螺儀,通過測量透射光譜的移動來工作。該陀螺儀的角度隨機游走可達0.09(°)/h,使其成為低成本、批量制造、小尺寸慣性級MOEMS陀螺儀的理想選擇。同年,東南大學Xia D.等提出了一種基于回音壁模式(Whispe-ring Gallery Mode,WGM)微盤諧振器和MEMS諧振器的MOEMS陀螺儀。MOEMS諧振器在電極輸入信號的驅動模式下工作時,若受到旋轉作用,將激活其感應模式,產生與角速度有關的形變,從而引起WGM諧振器透射譜的位移。通過測量該位移,就可以確定外部輸入的角速度。2021年,中北大學Xie K.等設計了一種新型基于單層近場衍射光柵塔爾博特(Talbot)效應的MOEMS陀螺儀,其結構如圖3(i)所示,微位移檢測靈敏度可達0.09%/nm,諧振頻率為7048Hz,品質因數為700,與電容檢測相比,該結構更簡單、性能更可靠。
(a)
2.2 腔光力系統慣性測量技術
腔光力系統(Cavity optomechanical system)慣性測量技術是一種基于光-物質相互作用的新型光力學/量子光力學精密測量方案。隨著高精度光學微納加工技術的快速發展,腔光力系統技術及應用研究受到了廣泛關注。它能夠實現光和機械諧振器之間的相互作用,為宏觀量子系統的基礎物理和精密傳感的實際應用提供一個平臺。在腔光力系統中,機械運動與光的耦合通過光學腔(法布里-珀羅腔、WGM球形腔、光子晶體等)實現共振增強,使得其能夠精確感測多個物理量,包括位移、質量、力、加速度、磁場和超聲波等。腔光力系統應用于加速度和角速度傳感具有巨大優勢,使其有很大潛力應用在高精度慣性測量及慣性導航系統中。
如圖2(b)所示,經典腔光力系統中存在兩種物理諧振模式,分別為光學微腔的光學諧振模式和機械振子(質量塊)的機械振蕩模式。對于設計研制完成的腔光力系統,其質量塊質量、光學諧振特性、機械諧振特性、光機械耦合率等便可確定。因此,在固定激光波長和幅度的情況下,光學微腔或機械振子最終的諧振/振蕩特性(頻率、幅度、相位等)僅隨外加加速度大小及方向的變化而變化,故而通過檢測光學微腔諧振特性或機械振子振蕩特性變化即可表征出加速度大小和方向。
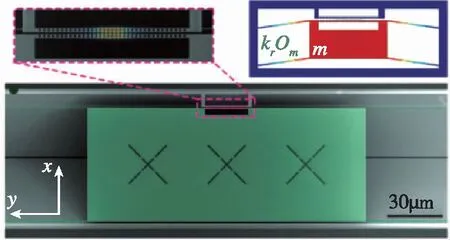
腔光力系統運用在加速度傳感上已有了許多顯著成果。2012年,美國加州理工學院A.G.Kra-use 等設計了一種基于平面集成氮化硅(SiN)光子晶體腔的腔光力系統加速度計,如圖4(a)所示,采用鏈接有大質量塊的光子晶體微腔感知因加速度作用產生的位移導致光學諧振腔特性的變化,進而通過測試光學特性及腔光力耦合特性的變化,以實現高帶寬和高分辨率的加速度傳感,其分辨率達到10μ/Hz。2014年,美國馬里蘭大學 C.F.Guz-mán等采用尺寸更大的可移動機械振蕩器,研制出探測精度為100n/Hz的腔光力加速度計。2016年,美國Y.Bao等設計了一種具有半球形空腔的平均取向的腔光力加速度計,采用法布里-珀羅干涉測量法和高精度光學腔轉換加速度,從而實現優于1μ/Hz的分辨率。同年,國內浙江大學Lu Q.等提出了基于光柵的腔光力加速度計,如圖4(b)所示,該加速度計由1個基于光柵的腔體和1個由4個蟹形懸臂與1個質量塊組成的加速度傳感芯片組成。光柵平行地安裝在傳感芯片的頂部,當準直激光束垂直入射光柵時,基于光柵的腔的輸出光強度隨腔的長度而變化,通過檢測其位置和入射光利用率,可計算出光柵和質量塊之間的位移,進而得出輸入的外部加速度。通過實驗測試獲得該加速度計的零偏穩定性達到 1.325μ。2018 年,英國倫敦大學學院Li Y.L.等提出了基于 WGM 光力結構的加速度計,利用光學WGM諧振器與波導的運動的色散和耗散耦合。其中二氧化硅微球懸臂梁同時用作光學腔和慣性測試質量。輸入加速度引起懸臂梁的偏轉,將改變微球和波導之間的倏逝耦合,進而可測量頻移,實現 WGM 共振的展寬。該加速度計原理如圖4(c)所示,其探測精度可達 4.5μ/Hz,偏置不穩定性為 31.8μ。2020年,國內電子科技大學Huang Y.等設計研制出一種硅基腔光力加速度計芯片結構,在光子晶體腔光機械結構上連接了質量較大的硅懸臂,可通過光學彈性效應測量機械振蕩頻率的偏移,以探測微弱加速度的變化量。重點提出了基于腔光力系統的參數光機械放大原理,以提高靈敏度和抑制機械熱噪聲特性,從而獲得了接近熱噪聲極限的 8.2μ/Hz探測精度,以及 50.9μ的零偏穩定性指標,結構如圖4(d)所示。

(a)
綜上所述,基于腔光力系統的加速度計和陀螺儀具有極高的精度與性能(部分陀螺儀、加速度計性能匯總如圖5所示),若能設計出結構簡單、制造簡易、可大規模生產的新型腔光力系統光學加速度計和陀螺儀,將有望替代MEMS技術,運用至超高精度慣性測量當中,實現新型戰略級的MIMU產品。
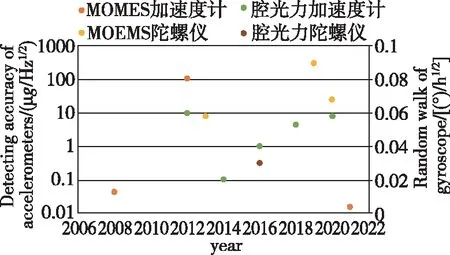
圖5 加速度計和陀螺儀性能參數
3 量子及量子增強型高精度測量技術
雖然MOMES及腔光力系統相比MEMS大幅度提高了慣性測量性能,但仍存在一些激光源引入的噪聲,有進一步優化的空間。腔光力系統加速度計和陀螺儀的噪聲主要有熱噪聲、散粒噪聲、量子反作用噪聲等。為了降低噪聲,可在基態下準備機械諧振器,即降低其溫度,以減小熱噪聲;可以用不同的輸入功率重新配置,通過光學彈簧和阻尼效應進行調諧,以減小散粒噪聲和量子反作用噪聲。對于腔光力加速度計,可以通過較大的光學模式體積來減小熱折射噪聲;而對于腔光力陀螺儀,則可以通過增大光學功率和提高光學品質因數來減小光學散粒噪聲。然而,這些方法對減小噪聲的作用十分有限。
隨著量子精密測量技術的快速突破和發展,出現了一些基于量子效應的陀螺儀,大大降低了上述噪聲的影響,如較為典型的冷原子干涉陀螺儀、核磁共振陀螺儀,以及新型的金剛石自旋陀螺儀、原子-光混合量子陀螺儀等。量子陀螺的出現,引領慣性導航技術迎來一場新的革命,已經成為當今導航技術領域最為前沿的研究課題之一。量子陀螺具有很多優點,如靈敏度高、分辨率高、環境適應性好、尺寸小等;不過成本較高,難以大批量生產。相比之下,基于壓縮光源的量子增強型傳感技術成本較低,且提供了一種降低腔光力系統慣性器件噪聲的新途徑。
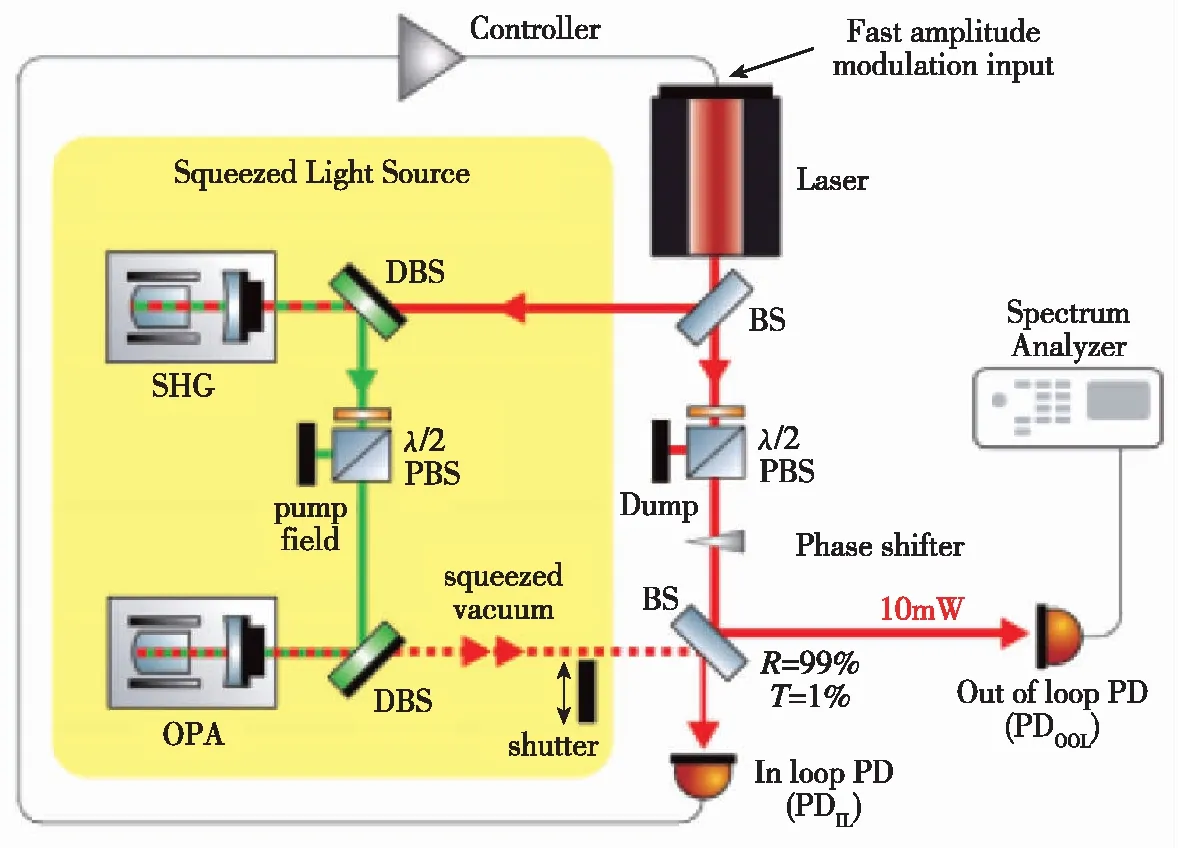
此外,近年來使用壓縮光源實現量子增強傳感的應用已十分廣泛,例如壓縮光源可應用于穩定激光功率(圖6(a))、光譜測量(圖6(b))、引力波探測(圖6(c))、光學頻率梳測量(圖6(d))、等離子體傳感(圖6(e))、測磁(圖6(f)、圖6(g))等。其中,美國A.Kumar等用強度差為9dB的壓縮光源實現量子增強等離子體傳感器,當用于檢測超聲波時,其靈敏度相對于散粒噪聲極限提高了56%。Li B.B.等將壓縮光源運用至腔光力磁力計中,本底噪聲被抑制了約40%,在散粒噪聲占主導地位的頻率下,靈敏度提高了約20%。
(a)
在已報道的各種基于壓縮光源的量子增強型精密測量技術方案中,均利用壓縮光源抑制傳統激光源中存在的散粒噪聲等噪聲源,從而獲得接近標準量子極限的探測精度。由此,若將壓縮光源用于腔光力系統慣性傳感技術中,將進一步提高腔光力系統慣性傳感器件的性能,這將是未來的熱點研究方向之一。
4 結論及展望
本文針對微慣性測量技術的最新研究進展情況展開論述,首先指出當前MIMU市場的主要構成是基于MEMS的產品,進而對這類MIMU結構的性能特點進行了簡要分析;接著重點總結分析了近年來快速發展的MOEMS慣性傳感、微腔光力系統慣性傳感、量子及量子增強傳感技術等方面的研究進展情況;最后,針對目前新型微慣性測量技術領域發展的特點及存在的技術瓶頸,對一種新型微慣性測量方案進行了展望,總結如下:
1)IMU對于INS乃至PNT都非常重要,目前市場上的IMU大多是基于MEMS的,但傳統MEMS IMU的精度無法滿足高性能需求,主要受限于各種電子噪聲和機械熱噪聲等,可通過校準算法、旋轉調制技術、去噪方法等方案,在一定程度上提升MEMS IMU的精度等性能指標。
2)另一方面,采用快速發展的MOEMS技術能夠降低MIMU的部分電學噪聲特性,但MOEMS采用激光源作為激勵,仍存在因激光源引入的散粒噪聲和量子反作用噪聲等噪聲源,以及機械振子存在的固有機械熱噪聲。為此,可通過MOEMS系統本身的光機械互作用效應,例如本文提出的腔光力系統的參數光機械放大原理,抑制機械噪聲;在此基礎上,通過壓縮光源技術、量子噪聲消除技術等途徑,抑制散粒噪聲和量子反作用噪聲,最終實現高精度的慣性測量。
3)如上所述,基于壓縮光源的量子增強型精密測量技術得到快速發展并產生大量應用,使用壓縮光源能進一步降低MOEMS慣性傳感器的散粒噪聲,達到標準量子噪聲極限(海森堡不確定性極限),將是未來的熱點研究方向之一。為此,本文末尾提出了一種基于腔光力系統的量子增強型IMU的慣性測量技術方案設想,有望在不久的將來實現低成本、高性能、可集成化、大批量生產的新型MIMU產品。
4)然而,目前報道的各種新型MOEMS慣性測量技術,包括前述基于腔光力系統及量子增強型的慣性傳感技術,其系統級集成還處在起步階段,大部分的MOEMS慣性傳感器系統采用板級電路,因此針對MOEMS慣性測量技術的專用集成電路亦是未來的重點發展方向之一。同時,為實現利用MOEMS技術提高慣性測量精度,各種新材料、新工藝的發展亦將成為未來重點關注的方向。
綜上,基于新型MOEMS技術的高精度微慣性測量技術的發展,離不開基礎的材料制備、成熟的加工工藝,以及對各種噪聲源產生機理的揭示和有效抑制途徑的實現,還有針對MOEMS技術的專用集成電路的發展與成熟。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00