貝塞爾曲線在智能AGV 車路徑規劃和精準入叉中的應用
2022-06-23 01:08:40韓衛民馬志剛梁遠星周松濤張謝許
無線互聯科技 2022年7期
韓衛民,翁 楓,馬志剛,梁遠星,周松濤,張謝許
(廣東電網有限責任公司廣州供電局,廣東 廣州 510620)
0 引言
貝塞爾曲線是計算機圖形圖像造型的一種工具,是圖形造型運用的最多的基本線條之一。它通過控制曲線上的4 個點(起始點、終止點以及兩個相互分離的中間點)來創造、編輯圖形。其中起重要作用的是位于曲線中央的控制線。這條線是虛擬的,中間與貝塞爾曲線交叉,兩端是控制端點。移動兩端的端點時,貝塞爾曲線改變曲線的曲率(彎曲的程度);移動中間點(也就是移動虛擬的控制線)時,貝塞爾曲線在起始點和終止點鎖定的情況下做均勻移動[1]。
無人車的局部路徑規劃吸引了國內外的研究者進行廣泛的研究,現有的方法可以分為五大類,分別是:傳統路徑規劃算法(模擬退火法、人工勢場法等)、啟發式搜索算法(Dijkstra 算法、A*算法及其變種等)、離散優化算法(模型預測算法、幾何軌線算法等)、隨機采樣算法(隨機路圖法、快速隨機拓展樹法等)和智能仿生算法(遺傳算法、蟻群算法、神經網絡等)[2]。幾何軌線法中的貝塞爾曲線方法是法國工程師Bezier 在1962 年為了設計汽車車身形狀提出的,之后貝塞爾曲線由于具有良好的數學特性而被廣泛應用到車輛路徑規劃領域。本文研究的是將四階貝塞爾曲線應用在智能AGV 車(Automated Guided Vehicle,AGV)路徑規劃和精準入叉中的問題[3]。
1 利用貝塞爾曲線規劃智能AGV 的行走路徑
智能AGV 車實現從駐車點到取貨點的行駛,駐車點和取貨點的狀態是貝塞爾曲線構建的形成條件[3],駐車點的狀態包括水平坐標(x,y)、航向角Ψ,曲率k,如下圖1 所示。
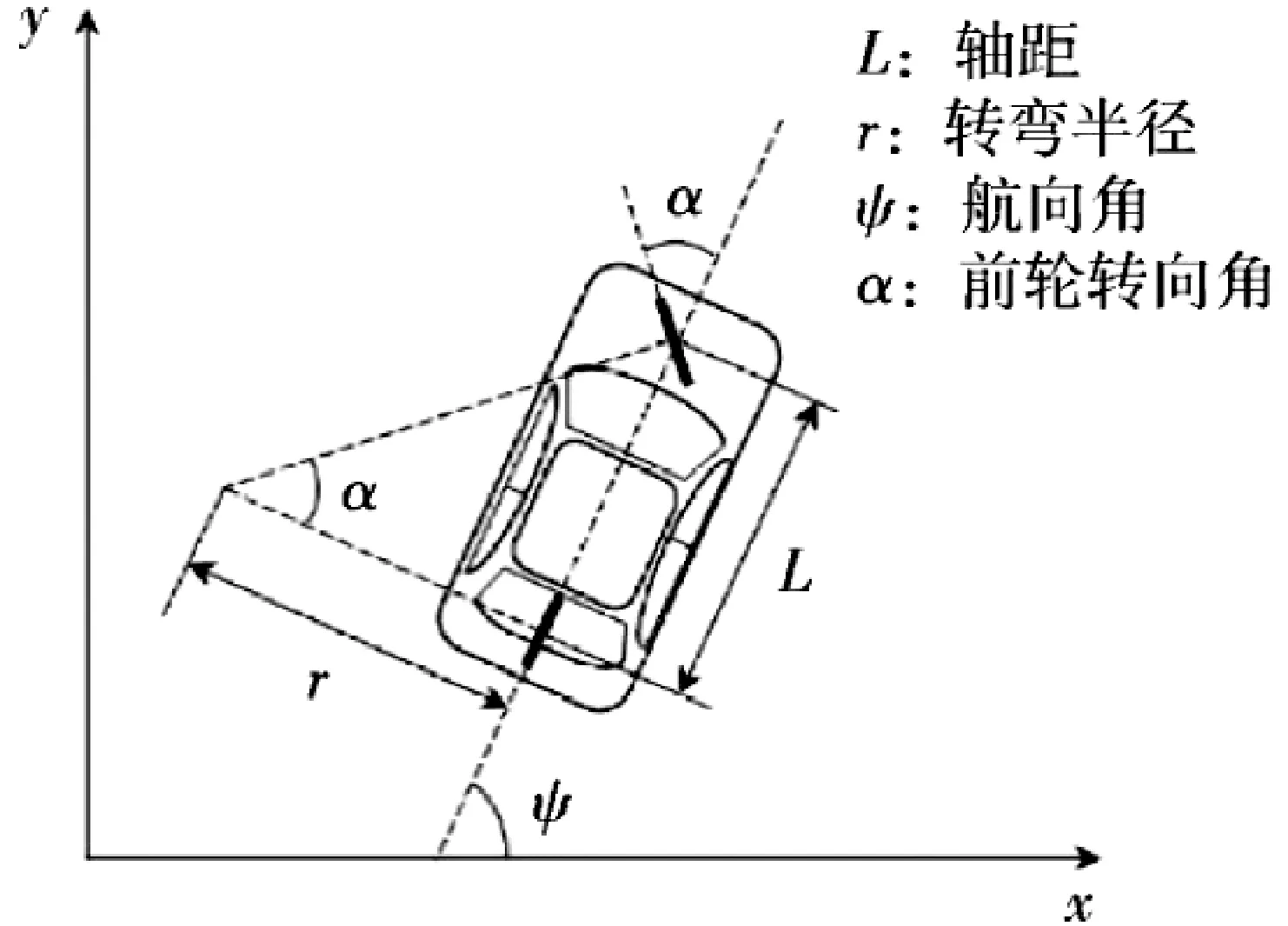
圖1 駐車點轉向模型
曲率k、轉彎半徑r、AGV 車的軸距L以及前輪轉角之間的關系:
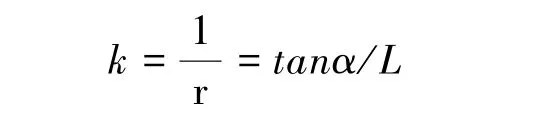
智能AGV 車的初始狀態X1=[x1,y1,Ψ1,k1] 和取貨點狀態XT=[xT,yT,ΨT,kT]
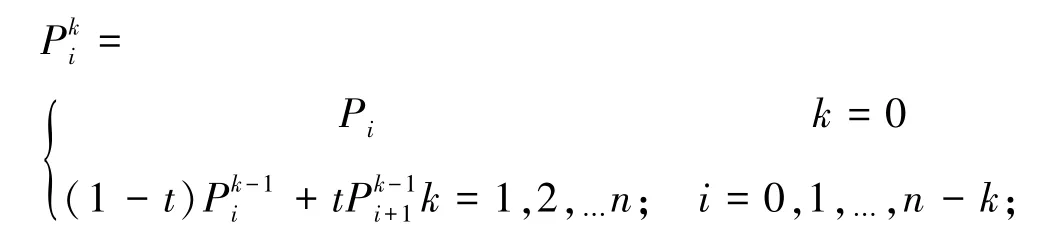
使用四階貝塞爾曲線的特征,規劃行走路徑,通用公式如下。
結合智能AGV 車的行走特征外廓尺寸,在AGV 路徑規劃時,給定起點和終點,由調度系統利用四階貝塞爾曲線規劃智能AGV 的行走路線,如圖2 所示。在試驗情景中,AGV 車進入貨車車廂取貨,當AGV 車到達車廂門口時,車前激光掃描設備掃描車廂輪廓,通過計算生產車廂地圖,確定AGV 車的運行終點,以入口為起點,再比對導航激光掃描生成輪廓測距數據與傳感器采集實時數據,利用貝塞爾曲線規劃更新路線,如圖3 所示。
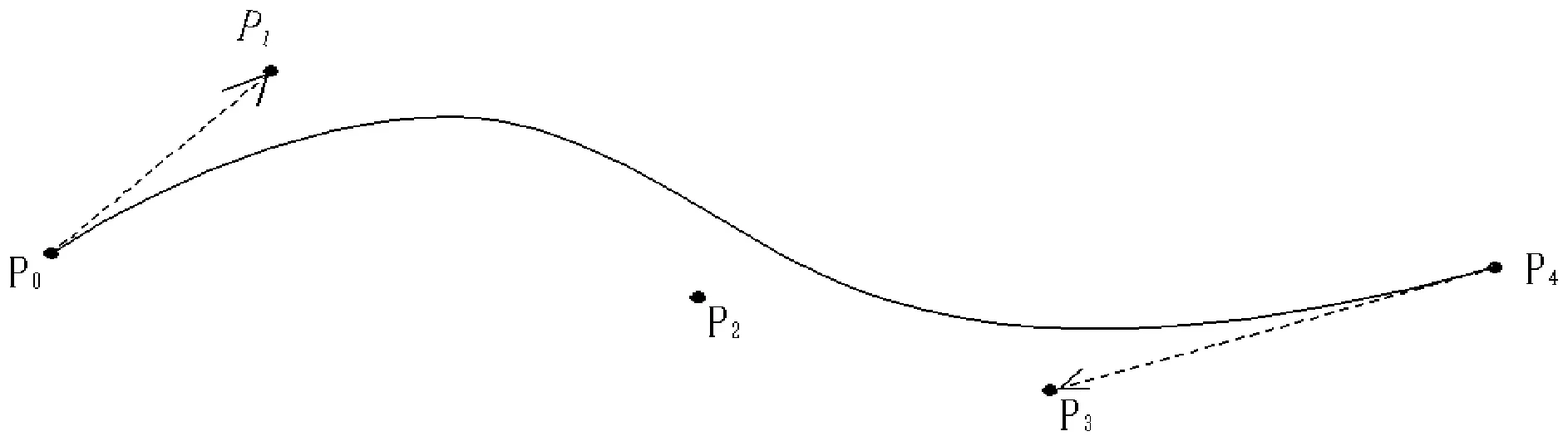
圖2 四階貝塞爾曲線

圖3 智能AGV 車取貨流程
2 智能AGV 車的精準入叉
在進入車廂后,AGV 車自帶的激光掃描裝置掃描貨物形態,生成貨物插孔的位置、角度和形狀圖形,確定AGV 車行走終點Pi 的坐標值(xi,yi)及終點的方向Ψ,這樣已知AGV 車體起點和終點,利用貝塞爾規劃車體行進路線,在前進過程中動態調整起點位置,反復糾偏調整姿態,使得AGV 車的叉齒準確進入貨物底部插孔叉取或放置貨物。
導航激光和傳感器將采集的車輛位置信息及貨物位置信息反饋給車輛調度系統軟件,車輛管理調度系統利用貝塞爾曲線規劃AGV 車的運行路徑,根據叉取對象的位置和方向,反復調整車輛進叉方向和位置,最終讓智能導航AGV 車的叉齒從正確的位置和方向進入貨物底部,并將其運送到規定位置。
3 結語
本文將貝塞爾曲線的方法應用到智能AGV車的路徑規劃和精準取放貨中,在設備需要拐彎的位置利用貝塞爾曲線規劃AGV 車的前進路線,同時配合激光掃描定位技術,確定起始點和終點,再利用貝塞爾曲線規劃AGV 車的進叉路線,最終成功叉取貨物。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16