一階小車倒立擺的控制系統設計
2022-06-26 07:02:00李豫南郭夢輝閆德建劉林博
科教創新與實踐 2022年14期
李豫南 郭夢輝 閆德建 劉林博
摘要:倒立擺系統廣泛應用于許多工程領域,所以倒立擺系統的研究具有重要的現實意義。為了使一階小車倒立擺系統處于平衡運動狀態,在主控模塊中采用STM32F103C8T6單片機作為主控制器,并采用18650鋰電池提供電源且LM317穩壓,通過MPU6050模塊陀螺儀和加速度計來檢測車內的傾角和加速度,用TB6612FNG驅動兩臺直流電機,利用霍爾編碼器獲取電機的轉速。算法上是運用了PI和PD串級控制,并對MPU6050采集的數據進行卡爾曼濾波,再對PID參數進行調整,實現對一階小車倒立擺系統的控制。
關鍵詞:小車倒立擺系統;STM32單片機;PID
1項目背景
小車倒立擺系統的特點是復雜、不穩定和非線性,控制倒立擺系統的任務是使擺體不作大角度和大速度的擺動,以達到平衡位置,然后系統克服擾動保持穩定。對倒立擺系統的研究可以反映許多典型的控制問題,如非線性問題、可靠性問題、跟蹤問題等。同時倒立擺系統具有重要的工程背景,在其他領域得到廣泛應用。
2硬件設計
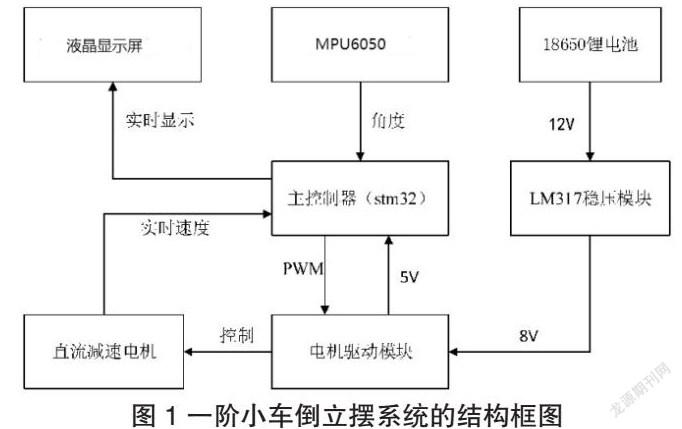
圖1為一階小車倒立擺系統的結構框圖。該系統主要包含了主控模塊、穩壓模塊、電機驅動模塊和MPU6050模塊。
2.1主控最小控制系統
主控模塊是以 STM32F103C8T6為最小控制系統,它是基于Cortex-M3內核的32位微型處理器,具有高性能、低成本的特點。STM32單片機通過調用多個內部和外部模塊,對各項數據進行實時監控,并在單片機的一塊液晶顯示屏上面顯示。
2.2穩壓模塊
穩壓模塊采用LM317集成電路,外形簡單,具有輸出電壓可調的特點,同時還具有穩壓范圍寬、穩壓性能好、噪聲低等優點。 所以當18650鋰電池為小車倒立擺系統供電時,LM317可以為整個系統提供穩定的電壓。
2.3 電機驅動模塊
TB6612FNG電機驅動芯片是可獨立雙向控制兩個直流電機的一種新型驅動器件。當單片機調節電機轉速時,STM32的I/O口輸出單片機帶載能力較弱,信號需要功率放大,電機驅動采用TB6612FNG。由于直流電機轉速高,輸出扭矩小,需要使用減速器來降低電機轉速,增加輸出扭矩。
在電機的末端是一個霍爾傳感器,它是一個旋轉傳感器,可以將角位移或角速度轉換成一系列數字脈沖。霍爾碼盤周圍有兩個霍爾元件,因此可以產生兩個速度脈沖:分別為A相和B相。小車的速度可以通過單位時間內的脈沖數來計算。
2.4 MPU6050模塊
MPU6050傳感器用于采集小車擺體姿態的信號,MPU6050是一個六軸方位傳感器,結合了三軸加速度計和三軸陀螺儀。在MPU6050中,陀螺儀用來測量擺體的傾斜角,加速度計用來測量加速度,采集到的數據需要經過卡爾曼濾波處理。 MPU6050的通信方式為IIC通信,芯片內置16字節A/D轉換器,可輸出16位數據。
3 PID算法設計
獲取小車倒立擺系統的傾斜角和速度是系統平衡的前提,這些數據在STM32中斷控制中結合PID算法,將輸出值賦給PWM寄存器來控制電機,從而實現倒立擺系統的平衡控制。倒立擺系統的運動控制分為平衡控制、速度控制和轉向控制,即直立環、速度環和角度環。
為了將倒立擺系統穩定在平衡位置,不僅需要對電機施加與傾斜角成正比的回復力,而且還要增加與角速度成正比的阻尼力。直立控制系統采用PD控制。因此,如果能夠測出倒立擺的傾斜角和角速度,控制加速度,就可以完成直立控制。小車的前進速度與倒立擺的傾斜度有關,如果要提高小車的前進速度,則需要增加小車的傾斜角度,在直立控制下,小車必須向前移動以保持倒立擺系統平衡,速度增加。速度控制系統采用PI控制。將直立控制和速度控制串聯起來,形成串級控制系統。
4結論
本文研究了一階小車倒立擺系統,倒立擺系統主要用于保持小車自平衡。本設計介紹了主控機和各模塊的功能,還提供了直立控制中的PD控制、速度控制中的PI控制、一階小車倒立擺系統的串級PID控制。 PID算法使用PD算法測量小車的角度,讓小車在直立控制時保持平衡,使用PI算法測量小車的速度,讓小車通過改變傾斜角來控制速度,進而調整位置。通過調節PID控制器的參數,可以有效控制一階小車倒立擺系統。
參考文獻:
[1]張思豪,王新榮,鄭成德,李向前,李慧敏.基于STM32的倒立擺PID學習研究平臺[J].中國科技信息,2021(12):59-61.
[2]劉拓晟.基于STM32的倒立擺控制系統設計[J].電腦知識與技術,2018,14(36):213-215.
[3]徐猛.基于STM32自平衡小車的設計與制作[J].計算機產品與流通,2019(09):110.
[4]杜麗敏,王巖.基于單片機的兩輪自動平衡小車系統的設計[J].長春大學學報,2020,30(12):19-24+38.
基金項目:河南科技大學2021年度大學生研究訓練計劃,項目編號:2021087
