穴盤苗高速移栽機吊杯式栽植器膜上成穴性能仿真與試驗*
2022-06-27 08:11:32楊啟志朱夢嵐賈翠平李章彥何文兵胡建平
中國農機化學報 2022年7期
楊啟志,朱夢嵐,賈翠平,李章彥,何文兵,胡建平
(江蘇大學農業工程學院,江蘇鎮江,212013)
0 引言
目前,我國蔬菜穴盤苗機械式移栽作業所使用的移栽機多以小型化及半自動化為主,移栽過程可大致分為取送苗、栽植機構移栽、覆土三個階段[1-4],其中,進行穩定的栽植機構移栽是移栽作業完成的重要基礎。吊杯式栽植機構因其可一次性完成打孔、栽植以及覆土等工作;適合柔嫩幼苗以及易碎缽體幼苗的移栽;可進行膜上栽植等眾多優勢被眾多研究者們選用[5-8]。不同形狀的吊杯能影響移栽機的膜上成穴性能及栽植品質。因此深入研究不同形狀吊杯在不同頻率下的膜上成穴性能對于吊杯式移栽機械的栽植質量的提高有著十分重要的意義。
我國幅員遼闊,各地區土壤差異大,尤其南方地區多為黏性較大的黏壤土,土壤結構復雜,黏結力大,影響因素多,尚未發現成熟的理論方法可用于土壤—機械互做機理研究,用簡單理論分析,無法確定土壤對吊杯的反作用力,栽植實際運動軌跡與理論分析相差甚遠,若進行田間試驗則成本較高且周期較長。離散元法可有效模擬分析機具作用下土壤的運動規律,可以從土壤顆粒之間的角度來探究在機具作用下土壤顆粒的運動及受力狀況,但僅適用于少量數量土壤顆粒群及簡單機械裝置模型仿真分析;RecurDyn多體動力學軟件模擬分析栽植器在理想狀態下較復雜運動規律。采用EDEM-RecurDyn耦合仿真,可對栽植機構作業過程中吊杯—土壤的接觸運動過程進行仿真模擬,并能研究在土壤作用下栽植器的復雜運動學特性。國外學者對于離散元應用的研究比較成熟,且較早的運用離散元軟件對土壤顆粒進行仿真分析。Ucgul等[9]通過離散元法分析了土壤顆粒與旋耕機之間的相互作用,以此來研究旋耕機的表層土壤混合能力并與實地試驗結果做對比,結果表明了旋耕機作用下的土壤混合能力可通過離散元仿真方法進行預測。Tamás[10]提出了一種三維離散單元法模型用于模擬土壤—清掃器之間相互作用,通過模擬和實測土槽數據的對比,驗證了DEM方法在土壤—機械互做機理研究上的可行性與正確性。目前對于吊杯式栽植器的很多研究都是在中低速狀態下基于無土壤接觸時的運動軌跡進行研究的,對于中高速狀態下栽植器和土壤之間的相互作用機理等尚不清楚。
因此擬采用離散元分析軟件EDEM并借助多體動力學仿真軟件RecurDyn對吊杯式栽植器和土壤之間的相互作用關系進行研究,仿真分析吊杯的膜上成穴性能參數,以獲得最佳栽植參數,以便于進一步對栽植器進行結構優化,從而使高速吊杯式移栽機在膜上具有更好的栽植性能。
1 吊杯式栽植器結構及主要設計參數
1.1 結構組成
吊杯式栽植機構主要由栽植器、栽植盤、覆土裝置、支撐主架等組成,如圖1所示。其中,栽植盤由偏心圓盤、安裝圓盤、軸承滾輪、空間凸輪、固定轉臂等組成,如圖2所示。
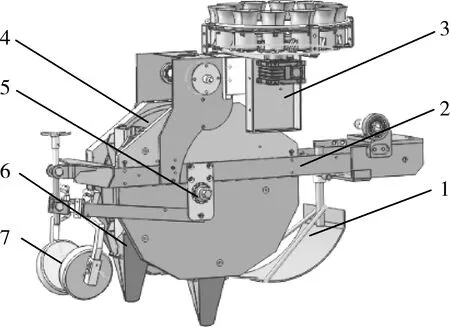
圖1 分苗栽植機構總裝圖
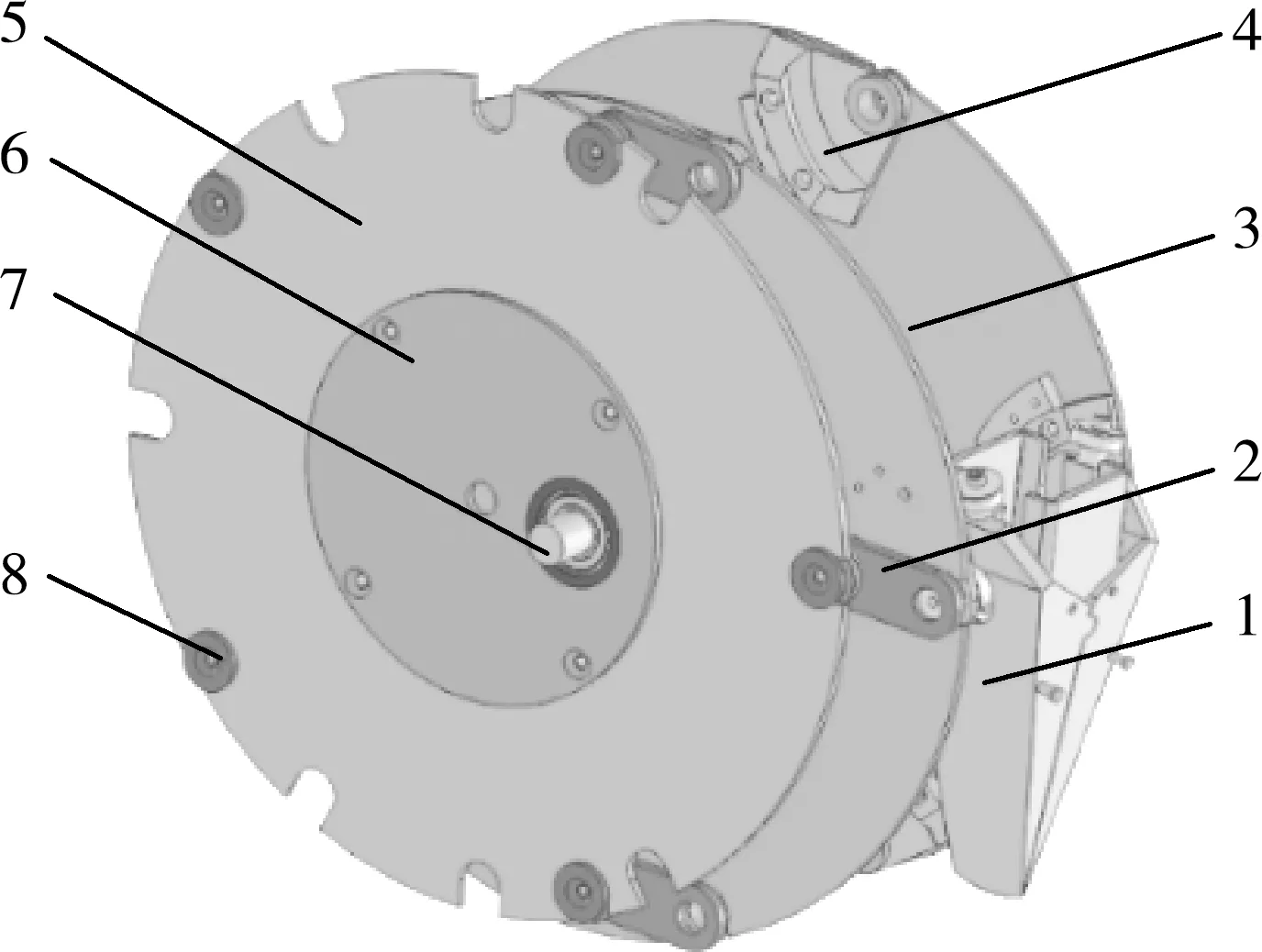
圖2 栽植盤
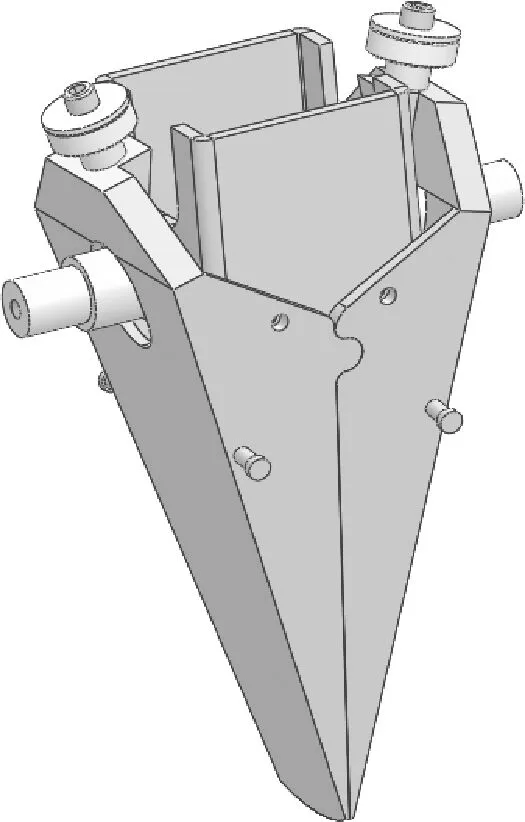
偏心圓盤、安裝盤以及固定轉臂組成平行四邊形機構,吊杯通過兩轉臂連接在兩安裝圓盤間,在工作過程中始終垂直于地面。吊杯構件主要由投苗杯、吊杯組件、空間凸輪、開合彈簧等組成,通過左右兩邊的固定轉臂連接在栽植盤上,如圖3所示。

圖3 吊杯構件
1.2 主要設計參數
根據吊杯式栽植器的設計要求[11],高速懸掛式自動移栽機的栽植機構單側可安裝的吊杯數量為1~6個,在作業過程中可根據株距要求確定實際安裝個數,移栽機安裝吊杯個數N為5個。當吊杯數量一定時,可通過調節栽植器及六方軸上的鏈輪齒數來改變地輪和栽植器的傳動比來調節栽植株距。栽植行距大小、栽植深度可根據具體蔬菜種植要求分別調節兩個栽植器之間的距離、栽植器和地面的高度進行相應調整,移栽機栽植機構主要設計參數如表1所示。
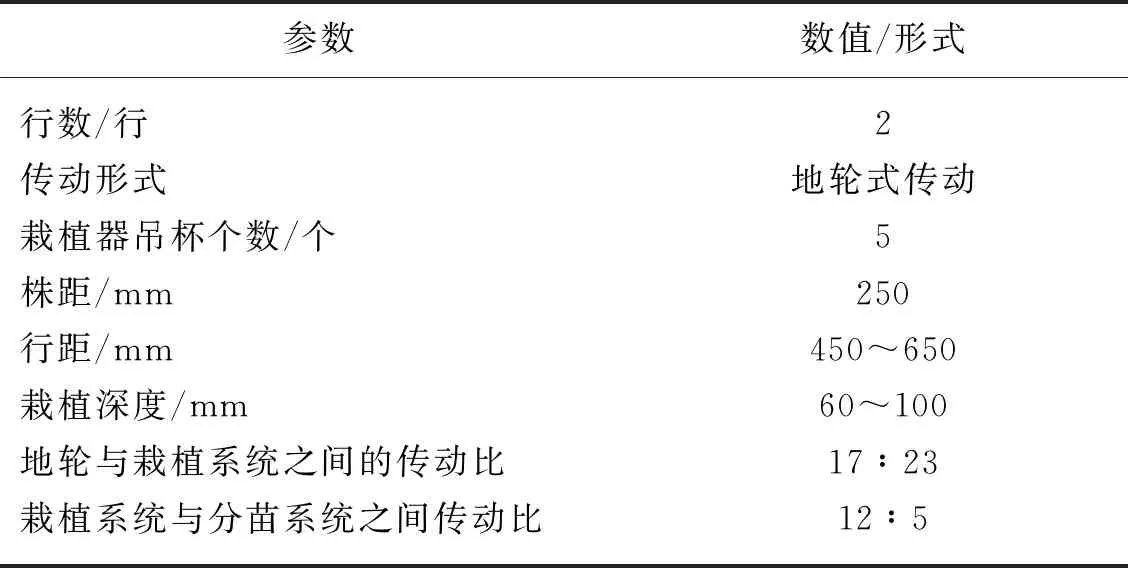
表1 栽植機構主要設計參數
2 建立吊杯式栽植器仿真模型
2.1 建立虛擬樣機模型
根據實際樣機的尺寸大小,在Solidworks中建立三維樣機模型,如圖4所示。然后對樣機模型進行簡化,精簡掉不需要的零部件后,將其導入到RecurDyn軟件中,利用RecurDyn軟件對機構添加約束、接觸、載荷等仿真參數,以72株/(min·行)為例,設置移栽機的前進速度為0.3 m/s,吊杯的傳動速度為14.4 r/min,為了清晰地在曲線圖上顯示,設置仿真時間為10 s,仿真步長為1 000步,其施加約束后的虛擬樣機如圖所示。主要運動副參數、不同栽植頻率下的吊杯傳動速度和移栽機前進速度如表2和表3所示。設置完成后的虛擬樣機模型如圖5所示。
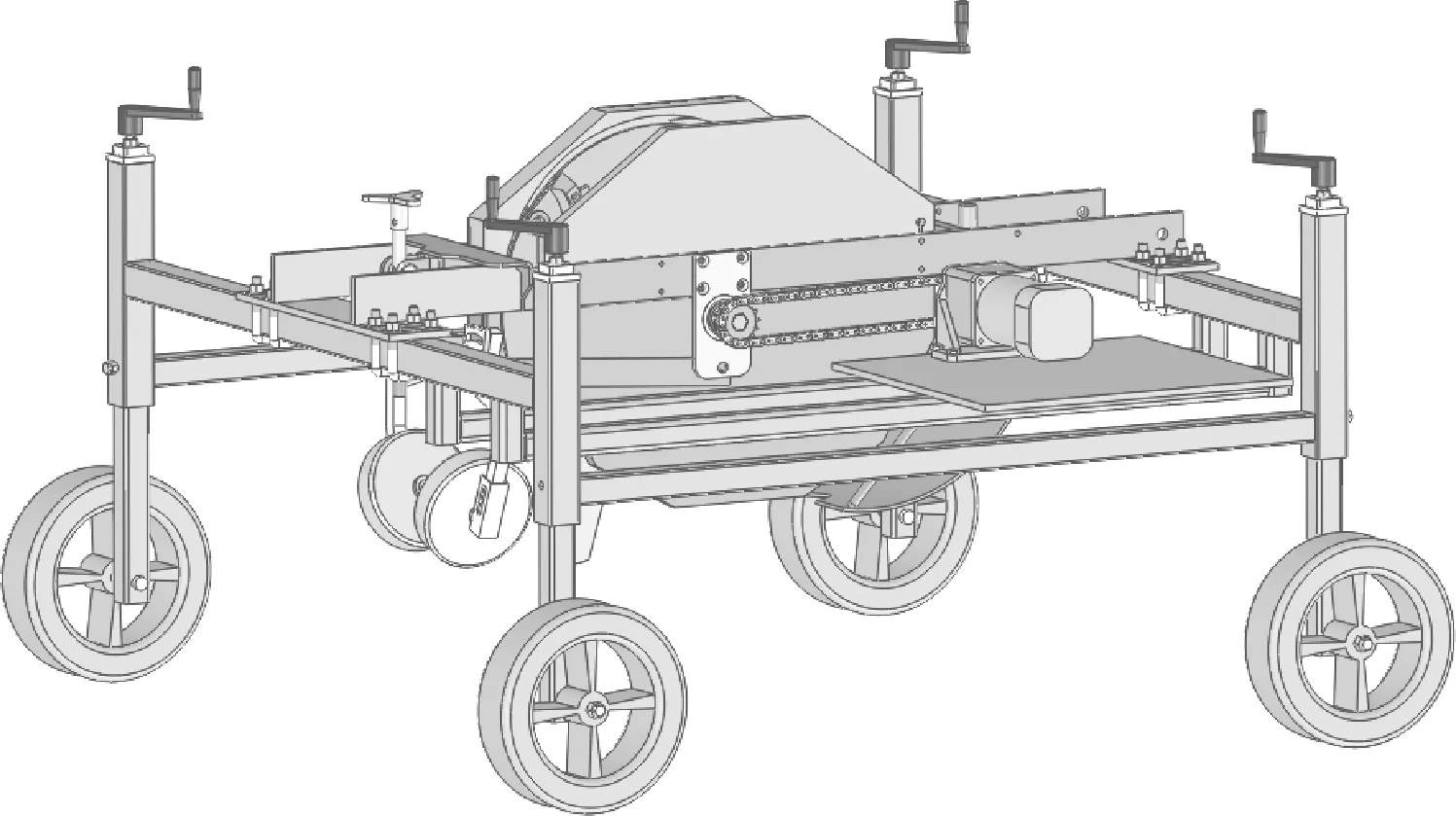
圖4 試驗臺架樣機

表2 栽植器虛擬樣機模型的運動副列表

表3 不同栽植頻率下的吊杯傳動速度和移栽機前進速度
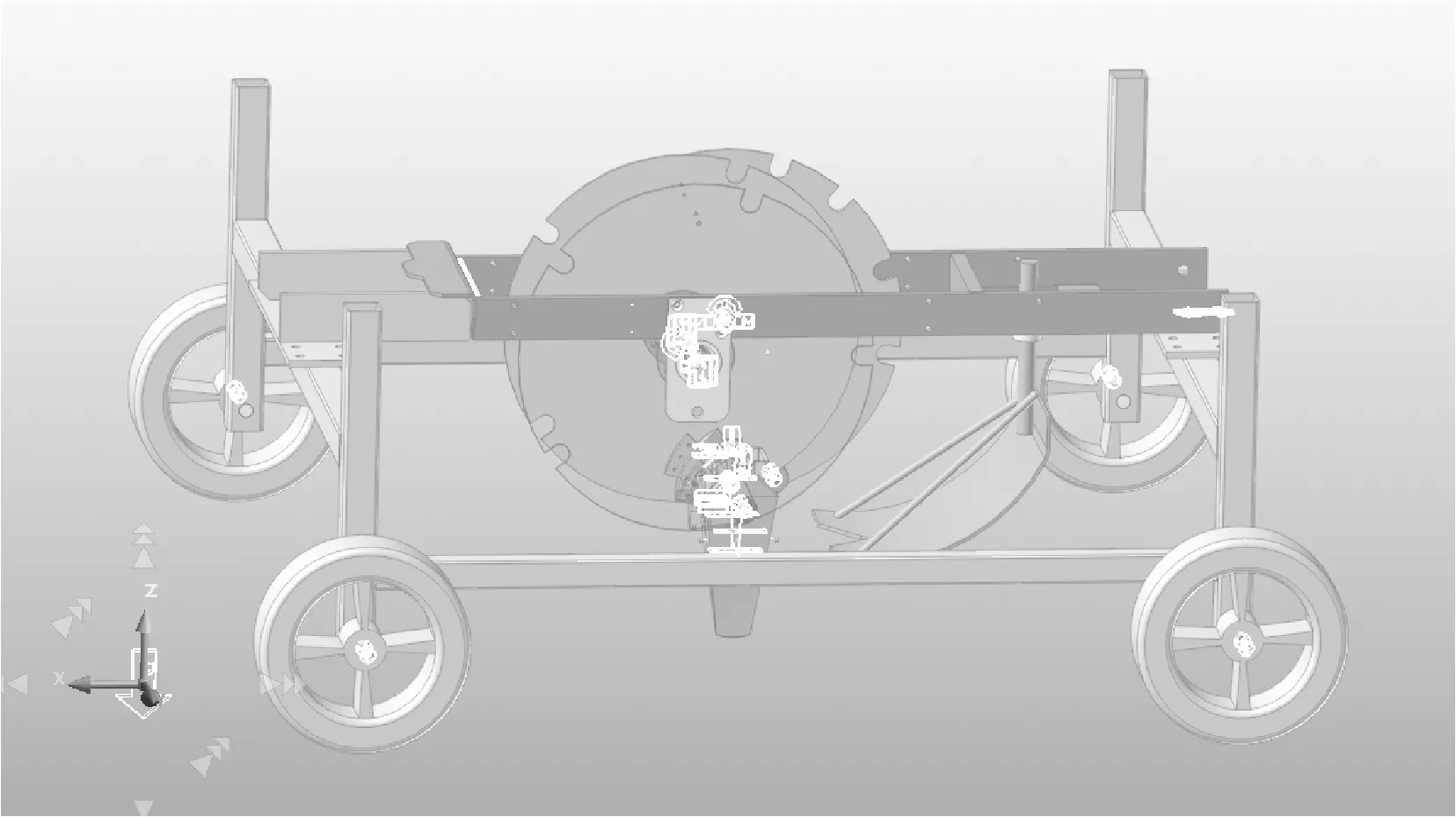
圖5 施加約束后的虛擬樣機
2.2 不同吊杯模型的建立
選擇蔬菜移栽作業中常用的兩種不同形狀吊杯,在Solidworks中創建三維模型,如圖6所示,然后將其裝配到栽植機構臺架上進行模擬仿真,分析栽植孔穴的成型情況。
(a) 錐形
3 不同吊杯膜上成穴性能模擬
3.1 膜上成穴性能評價標準
吊杯從開始入土到完全離開土壤的過程中,會對地膜造成一定的損壞,根據農藝要求,地膜損傷程度越小,則栽植效果越好。根據地膜最小損傷的要求,分析成穴過程中錐形吊杯和圓錐形吊杯對地膜的損傷程度。通過EDEM-RecurDyn耦合仿真對上述過程進行仿真模擬,分析對地膜損傷較小的吊杯,由于地膜在橫向方向有收縮性,所以本次試驗只比較縱向方向的尺寸。
3.2 不同栽植頻率下不同吊杯的栽植孔成穴模擬
選擇吊杯的栽植速率分別為60株/(min·行)、72株/(min·行)、84株/(min·行)、96株/(min·行),為了方便記錄,將錐形吊杯、圓錐形吊杯分別標記為A、B,如A60表示在栽植頻率為60株/(min·行)時錐形吊杯的成穴情況。吊杯在上升至完全離開土壤的過程中,土壤顆粒逐漸回流,當土壤顆粒穩定后,形成了一個最終狀態的穴孔,孔穴的最終成型效果如圖7所示。對穩定后的栽植孔穴口尺寸橫向長度進行測量,其中橫向指的是與移栽機前進方向垂直的方向。為保證試驗結果的準確程度,在相同的栽植頻率下,取三次仿真試驗結果的平均值作為最終的試驗結果,測量結果如表4所示。
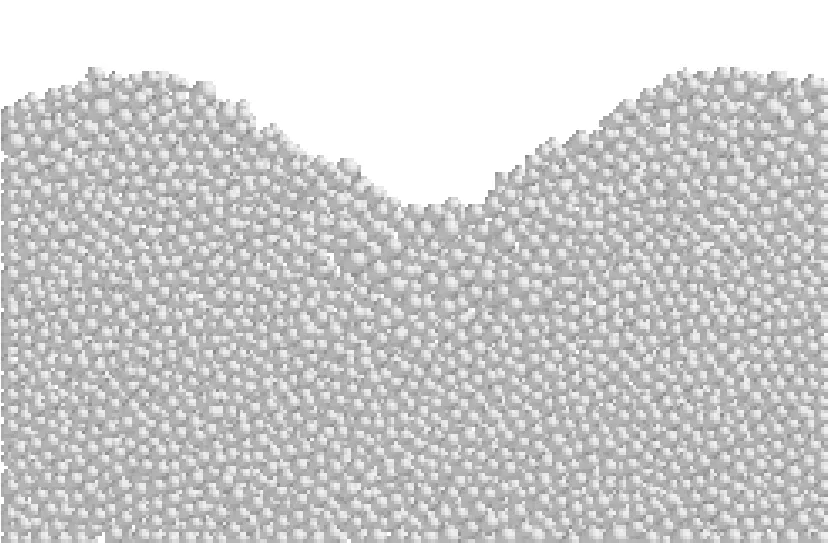
(a) A60

表4 栽植孔穴口尺寸
由圖7可得,由于栽植器運動軌跡取決于栽植器特征值λ[12],故在栽植器特征值λ固定的情況下,吊杯的運動軌跡基本相同,所以栽植孔的成型效果也基本相同,而栽植頻率的不同導致栽植孔的大小有細微的差別。此試驗數據為后續吊杯撕膜程度提供參考。
3.3 不同吊杯膜上成穴性能模擬
吊杯從開始入土到完全離開土壤的過程中,會對地膜造成一定的損壞,根據農藝要求,地膜損傷程度越小,則栽植效果越好。根據地膜最小損傷的要求,分析成穴過程中錐形吊杯和圓錐形吊杯對地膜的損傷程度。通過EDEM-RecurDyn耦合仿真對上述過程進行仿真模擬,分析對地膜損傷較小的吊杯,由于地膜在橫向方向有收縮性,所以本次試驗只比較縱向方向的尺寸。
通過查找相關文獻[13-14]確定地膜的仿真參數,如表5所示。

表5 膜上成穴仿真參數
根據上述參數,在EDEM中建立土槽—地膜—吊杯仿真模型,如圖8所示。
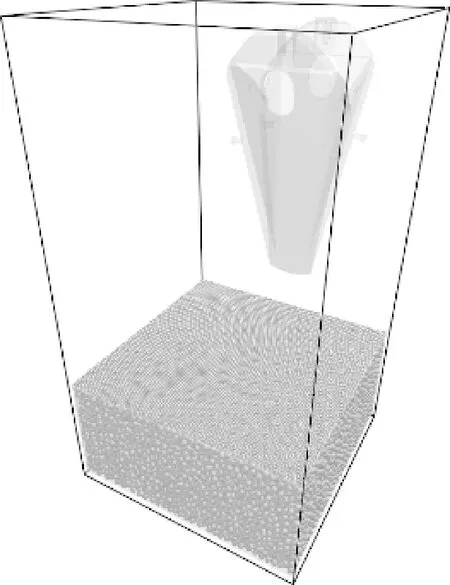
圖8 土槽—地膜—吊杯耦合仿真模型
主要選擇兩種吊杯中對地膜損傷較小的吊杯,所以在建立地膜的EDEM仿真模型時,對地膜有一定比例的放大。通過上文無膜條件下的成穴特性可知,在栽植器特征系數λ為定值時,不同栽植頻率下栽植孔的穴口尺寸基本相同,所以本次試驗選擇一種栽植頻率進行膜上成穴性能仿真試驗,選擇栽植頻率為72株/(min·行),通過EDEM-RecurDyn耦合仿真,比較兩種吊杯所形成的膜面穴口形狀及尺寸,試驗效果如圖9所示。
(a) 錐形吊杯撕膜效果
3.4 結果分析
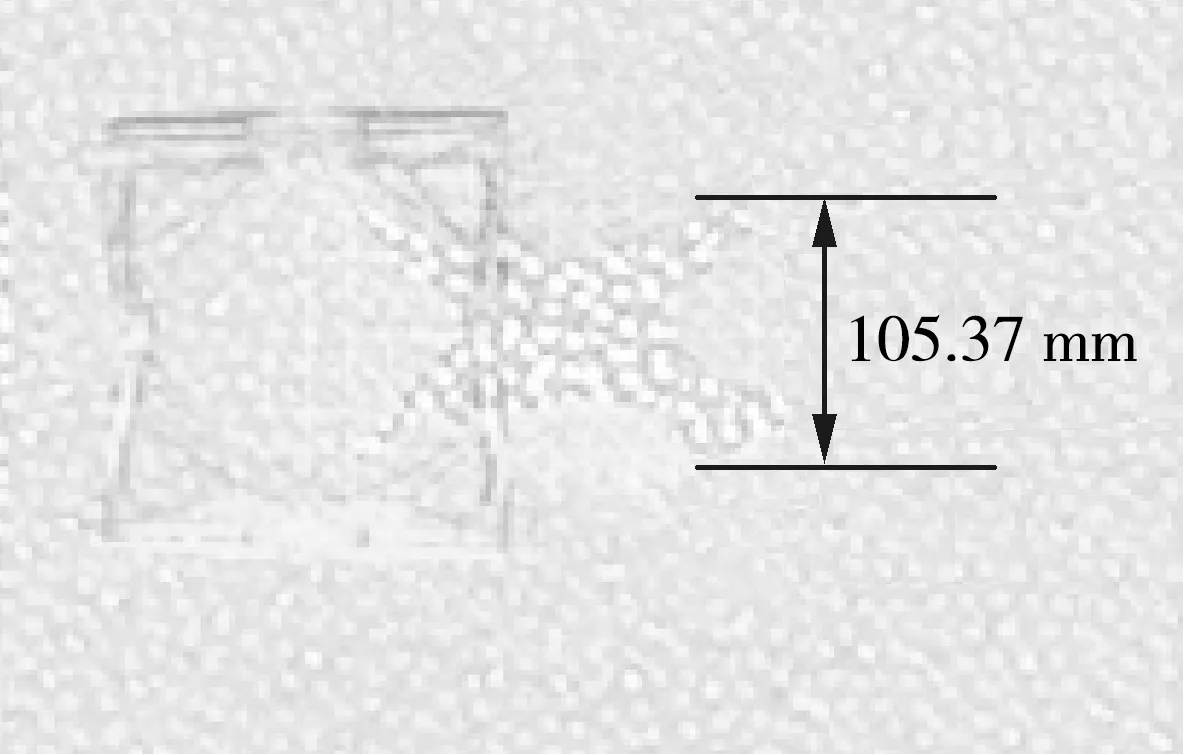
在栽植頻率為72株/(min·行)時,由圖9可知,兩種吊杯形成的膜面穴口形狀不同,錐形吊杯形成的穴口從四角撕開,形成“×”形穴口,其縱向尺寸為同側兩最遠點之間的距離。圓錐形吊杯形成的穴口從中間撕開,形成“+”形穴口,其縱向尺寸為中間兩端點之間的距離,為了試驗的準確性,每種吊杯做三組平行試驗,對其取平均值即為地膜穴口縱向尺寸。仿真模擬得錐形吊杯形成的膜口縱向尺寸為105.37 mm,圓錐形吊杯形成膜口縱向尺寸為101.26 mm,圓錐形吊杯的縱向尺寸較錐形吊杯小4.11 mm。由于本次仿真試驗對地膜厚度做了放大處理,本次測得試驗數據并不能和栽植作業中實際的膜口尺寸做直接數據對比,但是其趨勢可和實際趨勢進行比較。試驗表明,不同形狀的吊杯對膜口的縱向尺寸的影響較大,就地膜的損傷程度而言,圓錐形吊杯的膜上成穴效果優于錐形吊杯。
4 試驗驗證
4.1 試驗目的及設備
通過吊杯式栽植器臺架試驗,可以檢驗兩種不同形狀吊杯分別在四種不同栽植頻率下的成穴性能和在栽植頻率為72株/(min·行)時的膜上成穴性能,并和仿真試驗結果進行比較。
試驗臺架主要包括吊杯式栽植機構、牽引機構及控制系統。栽植機構由伺服電機驅動,牽引機構由汽油機驅動,控制系統主要用來調節栽植機構的栽植速度與牽引機構的前進速度相匹配。
試驗器具主要包括:錐形吊杯及圓錐形吊杯(圖10)、角度器、直尺、卷尺、高清攝像機等。

(a) 錐形吊杯
搭建室內臺架實驗場地,規格(長×寬×壟高)14 000 mm×1000 mm×150 mm,壟槽內選擇沙子來代替試驗土壤,原因在于:一方面南方地區土壤顆粒較黏,流動性較差,當改變土壤含水率時試驗效果不易顯現,使用沙子作為試驗對象,容易呈現出試驗結果,另一方面該研究屬于定性研究,此研究規律不僅適用于南方地區土壤同時適用于其他地區。
4.2 試驗方法
通過遙控器控制牽引機構的行走速度,從而改變移栽機構的水平前進速度,通過改變調速電機的轉速,從而改變移栽機構的旋轉運動速度,移栽機構前進速度和其栽植器旋轉速度相匹配,從而實現特定的栽植頻率。本次試驗情況如圖11所示。
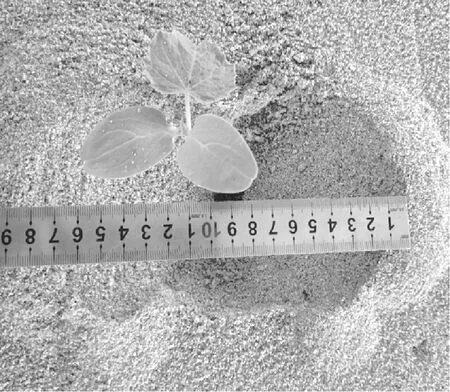
(a) 穴口橫向長度測量
進行非膜上成穴試驗,每種吊杯共進行4組試驗,分別對應四種不同的栽植頻率,即60株/(min·行)、72株/(min·行)、84株/(min·行)、96株/(min·行);膜上成穴試驗選擇栽植頻率為72株/(min·行)時進行膜上成穴試驗,每組試驗走完整個土槽,測定中間部分連續的5個栽植穴的穴口縱向尺寸,并取平均值作為試驗結果,有效深度的測量方法是缽苗落入栽植孔后測量其上表面距離孔穴上表面的距離,然后加上缽苗的缽體高度,即為臺架試驗的有效深度。
4.3 試驗結果及分析
兩種吊杯采用四種不同的栽植頻率,測量每組實驗中連續5個的栽植穴的縱向尺寸,并取平均值作為試驗結果。
由表6可知,栽植器成穴性能臺架試驗與仿真試驗之間略有差別,具體表現為:錐形吊杯與圓錐形吊杯的穴口橫向長度相差最大值分別為5.06 mm、7.30 mm;錐形吊杯與圓錐形吊杯的穴口縱向長度相差最大值分別為4.98 mm、3.40 mm;錐形吊杯與圓錐形吊杯的有效深度相差最大值分別為1.24 mm、0.64 mm,但栽植器成穴性能臺架試驗結果和仿真試驗結果趨勢一致,說明在成穴試驗中,仿真試驗結果具有有效性。
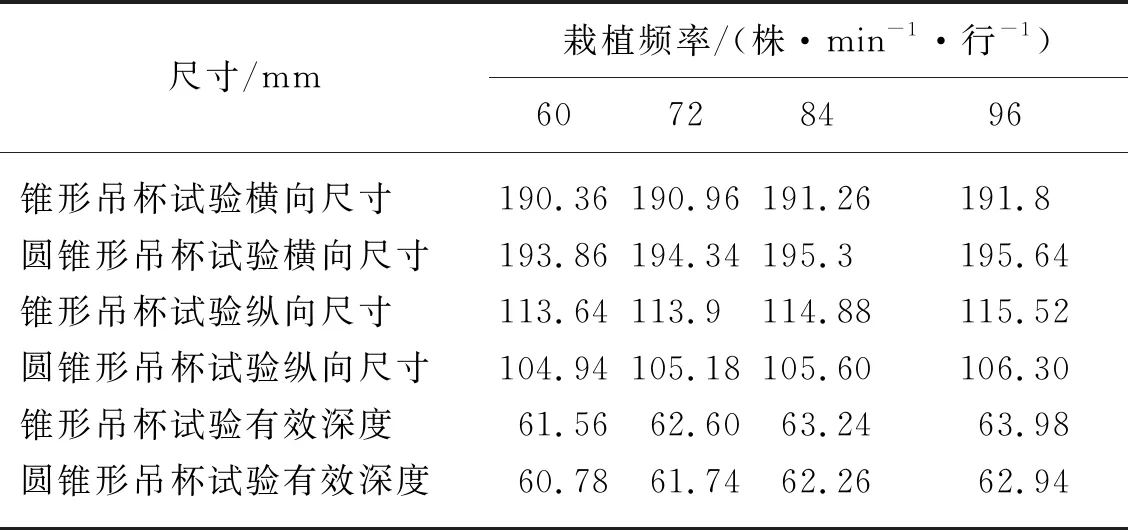
表6 吊杯試驗成穴尺寸
兩種吊杯采用特定栽植頻率進行膜上成穴試驗,如圖12所示。栽植頻率為72株/(min·行),測量每組試驗中連續5個穴口的膜口縱向尺寸,結果如表7所示。

(a) 土槽覆膜
由表7可知,錐形吊杯的膜口縱向尺寸約為130.58 mm,圓錐形吊杯的膜口縱向尺寸約為121.40 mm,由此可得圓錐形吊杯的膜上成穴性能優于錐形吊杯。兩種吊杯的縱向穴口尺寸趨勢和仿真試驗中的趨勢一致,證明了使用EDEM-RecurDyn耦合仿真模擬栽植器膜上成穴性能的合理性。
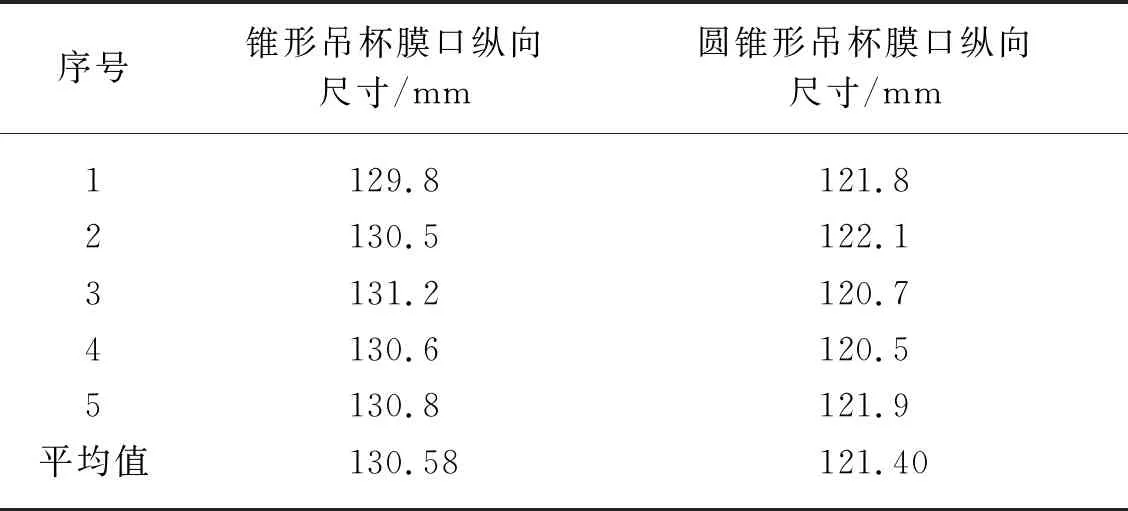
表7 膜口尺寸(栽植頻率72株/(min·行))
5 結論
結合吊杯式栽植器特性,借助離散元仿真軟件EDEM及多體系統動力學分析軟件RecurDyn,耦合仿真分出兩種不同形狀的吊杯在四種不同栽植頻率下的成穴過程仿真分析、膜上成穴性能和撕膜大小程度。
1) 通過EDEM-RecurDyn耦合仿真分析了兩種不同形狀的吊杯在四種不同栽植頻率下的栽植孔成型后的穴口尺寸,結果表明不同形狀的吊杯對穴口橫向尺寸的影響不明顯。
2) 通過EDEM-RecurDyn耦合仿真分析了兩種不同形狀的吊杯在栽植頻率為72株/(min·行)下的條件下,對兩種形狀吊杯的膜上成穴性能進行分析,仿真模擬得錐形吊杯形成的膜口縱向尺寸為105.37 mm,圓錐形吊杯形成膜口縱向尺寸為101.26 mm,圓錐形吊杯的縱向尺寸較錐形吊杯小4.11 mm。得到不同形狀的吊杯對膜口的縱向尺寸的影響較大,就地膜的損傷程度而言,圓錐形吊杯的膜上成穴效果優于錐形吊杯。
3) 通過栽植器臺架進行了室內非膜上和膜上成穴性土槽試驗,非膜上成穴試驗測定了兩種吊杯四種不同栽植頻率的成穴性能,實驗表明和仿真略有差別錐形吊杯與圓錐形吊杯的穴口橫向長度相差最大值分別為5.06 mm、7.30 mm;錐形吊杯與圓錐形吊杯的穴口縱向長度相差最大值分別為4.98 mm、3.40 mm,但是與仿真試驗結果趨勢一致;膜上成穴試驗膜上成穴試驗測定了兩種吊杯在栽植頻率為72株/(min·行)下的膜上成穴性能,結果表明與仿真結果一致,不同形狀的吊杯對穴口的縱向尺寸影響較大,而對穴口橫向尺寸的影響不明顯,通過膜上成穴性能試驗,得出錐形吊杯和圓錐形吊杯的膜口縱向尺寸分別為130.58 mm、121.40 mm左右。臺架試驗結果與仿真試驗結果趨勢一致,證明建立的離散元仿真成穴模型正確,采用離散元仿真試驗方法可以有效預栽植器的成穴性能和質量。