基于圖像識別的皮帶運輸機故障自動診斷方法
2022-06-27 08:30:06張聞中華守彤龔孜詣
制造業自動化 2022年3期
陳 逸,張聞中,華守彤,龔孜詣
(華能國際電力股份有限公司 上海石洞口第二電廠,上海 201100)
0 引言
圖像識別是指利用計算機程序對圖像進行處理的應用技術,能夠將目標圖像中的對象節點全部識別出來。近年來,隨著“物料無極運輸”觀念的普及,圖像識別技術被廣泛應用于機械損傷探查、機械故障診斷等多個領域之中。皮帶運輸機是一種常見的物料運輸裝置,通常以皮帶作為介質,將工業物料運輸至各個生產環節,在其應用過程中,極易表現出皮帶跑偏等運行故障,為避免這類故障情況的發生,注意所安裝元件的尺寸精度并對其進行定期維護與保養就顯得極為重要[1]。然而由于運輸距離長、磨損程度不可控等問題,極易使主機元件對于皮帶運輸機故障表現行為的診斷能力出現明顯下降,這不但會造成主要機械設備的嚴重損傷,還會對主運輸機元件的使用壽命造成影響。為避免上述情況的發生,以圖像識別原理為基礎,設計一種新型的皮帶運輸機故障自動診斷方法。
1 基于圖像識別的故障信號特征提取
基于圖像識別的故障信號特征提取包含目標圖像預處理、皮帶運輸機振動機理分析、固有模態函數構建三個執行環節,具體操作流程如下。
1.1 目標圖像預處理
目標圖像預處理能夠將待診斷圖像中的節點信息引入到固有模態函數中,再根據識別節點的實時分布形式,定義皮帶運輸機故障信號特征的傳輸行為,從而判斷所得計算閾值結果是否滿足待識別圖像的“分割熵”標準。所謂“分割熵”,也叫待識別圖像的最大閾值結果,在對皮帶運輸機故障信號特征進行提取時,閾值結果的取值極限范圍越大,就表示目標圖像中所包含識別節點的數量越多;反之,若閾值結果的取值極限范圍相對較小,則表示目標圖像中所包含識別節點的數量也相對較少。
設A、B、C表示三個不相關的特征節點,iA、eA表示與節點A相關的目標圖像分割值與模態熵值,iB、eB表示與節點B相關的目標圖像分割值與模態熵值,iC、eC表示與節點C相關的目標圖像分割值與模態熵值。聯立上述物理量,可將皮帶運輸機故障信號特征的目標圖像預處理表達式定義為:

假設在待識別圖像中,皮帶運輸機故障信號特征節點所處位置不會發生變化,為準確分析機械設備元件的振動機理,則必須保證所選取識別節點不唯一。
1.2 皮帶運輸機的振動機理分析
皮帶運輸機故障行為的振動機理包含初始不平衡、新轉子不平衡兩種基本類型。其中,初始不平衡是指由機械制造與裝配問題引起的運輸機元件質心偏移的現象;新轉子不平衡則是指在皮帶運輸機運行過程中,由機械設備腐蝕、磨損等原因引發的恒定轉子損壞的現象。從振動傳導特性的角度來看,皮帶運輸機初始不平衡故障、新轉子不平衡故障的誘發原因雖然不同,但兩者都能對皮帶元件的正常振動行為造成影響[2]。對于皮帶運輸機元件而言,皮帶振動強度對于機械設備轉速的變化十分敏感,且機械設備轉子的轉速越快,皮帶運輸機故障行為所帶來的振動表現也就越明顯。設γ表示初始不平衡系數,r表示新轉子不平衡系數,u1、u2表示兩個不相關的皮帶運輸機故障信號振動特征值,表示系數u1與u2的物理平均值,β表示運輸機元件的質心偏移向量。在上述物理量的支持下,聯立式(1),可將皮帶運輸機故障行為的振動機理表達式定義為:

在初始不平衡、新轉子不平衡故障行為同時發生時,由于二者表現行為具有明顯的相位差,所以為保證故障診斷結果的絕對真實性,應對兩種皮帶運輸機故障信號特征進行分別提取。
1.3 固有模態函數
固有模態函數決定了皮帶運輸機故障信號特征的表現形式。在圖像識別原理的認知范疇中,皮帶運輸機故障信號特征會出現多種不同的表現形態,且在已知振動機理表達式條件的前提下,固有模態函數所涉及的故障信號特征數據量越大,主機元件對于故障表現行為的精準診斷能力也就越強[3]。為使固有模態函數能夠完全符合皮帶運輸機故障行為的表現形式,在定義函數表達式時,應確定原變量φ的具體數值水平。規定α表示皮帶運輸機故障信號特征數據的實時存儲參量,y(α)表示與參量α相關的縱向殘差定標值,x(α)表示與參量α相關的橫向殘差定標值。聯立上述物理量,可將原變量φ的計算表達式定義為:

在式(3)的基礎上,設λ表示皮帶運輸機故障信號特征的模態賦值參量,且λ>1 的不等式條件恒成立,p˙表示基于圖像識別原理所提取的故障信號特征參量值,ΔH表示單位時間內所能識別的皮帶運輸機故障信號特征數據總量。聯立上述物理量,可將基于圖像識別的皮帶運輸機故障信號特征固有模態函數表示為:
根據固有模態函數條件,對皮帶運輸機故障信號特征數據進行處理,再按照圖像識別原則,完成對這些信息參量的按需提取。
2 皮帶運輸機故障的自動診斷
在圖像識別原理的支持下,按照動力學模型構建、故障行為振動特性分析、時域同步診斷系數計算的處理流程,實現對皮帶運輸機故障行為的自動診斷。
2.1 動力學模型
皮帶運輸機作為一種重要的機械設備應用元件,在運輸皮帶與電動機、電動機與電量負載之間會形成完整的電信號閉合回路,且隨著負載電阻數值的增大,各個回路內電信號參量的傳輸速率也會不斷加快(模型結構如圖1所示)[4]。當出現明顯故障行為時,電動機元件的電量輸出能力會受到影響,此時下級機械設備的運行能力會明顯減弱,這也是導致皮帶運輸機設備實時電量負載水平并不能達到實際數值標準的主要原因。

圖1 皮帶運輸機元件的動力學結構
設S表示皮帶運輸機設備內電量負載系數的初始賦值,a1、a2、…、an表示n個不同的電量信號傳輸特征值,n表示電量信號耦合負載最大值,m表示故障行為下的耦合電容,R表示皮帶運輸機元件的內阻數值。在上述物理量的支持下,聯立式(4),可將皮帶運輸機故障行為的動力學模型表達式定義為:

已知皮帶運輸機元件內阻數值、故障行為的耦合電容數值始終保持不變,所以可將動力學模型看作一個半定值表達式,在對皮帶運輸機故障行為進行診斷時,應根據圖像識別節點的分布形式,對電量負載系數實值進行配比。
2.2 故障行為的振動特性
在皮帶運輸機運行過程中,由于動力施壓并不來源于同一方向,所以故障信號特征總是保持來回波動的傳輸形式,而獨立波段內識別節點的排列狀態,也就表現了故障行為的振動特性。在圖像識別技術的認知中,皮帶運輸機故障行為的振動特性總是呈現階段性往復的表現形式,即每一個獨立波段內都包含一個故障信號特征的極大值和一個與之對應的極小值[5]。設zmax表示皮帶運輸機故障信號特征的極大值,zmin表示皮帶運輸機故障信號特征的極小值,在動力學向量恒為f的前提下,可將其計算表達式定義為:
式(6)中,表示皮帶運輸機故障信號特征的均值定義項。在式(6)的基礎上,設σ1、σ2表示兩個不同的振幅定義系數,ΔT表示故障行為波段的單位振動周期。聯立上述物理量,可將皮帶運輸機故障行為的振動特性表達式定義為:

其中,ω1表示與σ1相關的故障行為圖像識別定標值,ω2表示與σ2相關的故障行為圖像識別定標值。若將振動特性看作是皮帶運輸機故障特征的必要表現形式,則可認為該項理論條件的取值結果會直接影響時域同步診斷指標的計算數值。
2.3 時域同步診斷系數
利用時域同步診斷系數對皮帶運輸機故障行為進行判別,需要確定脈沖信號與振動信號之間的數值配比關系,并以圖像識別原理為基礎,在確定指標參量實時映射權限的同時,實現對故障信號特征的按需排序與處理。針對時域同步診斷系數的計算,需要同時參考皮帶運輸機故障信號的脈沖信號特征與振動信號特征[6]。皮帶運輸機故障信號的脈沖信號特征可表示為,作為一項矢量參考條件,該項物理量的實際取值越大,時域同步診斷系數的計算數值也就越大。皮帶運輸機故障信號的振動信號特征可表示為,與脈沖信號特征不同,該項物理量的數值變化幅度相對較小,因此對于利用時域同步診斷系數而言,該項物理指標的影響作用能力也相對較弱。在上述物理量的支持下,聯立式(7),可將時域同步診斷系數計算表達式定義為:

式(8)中,ξ表示基于圖像識別的皮帶運輸機故障信號特征定標值,μ表示時域診斷權限,?表示同步診斷權限,C表示基于圖像識別的皮帶運輸機故障信號特征初始判別值。一般來說,時域同步診斷系數的取值越大,則表示皮帶運輸機故障行為被準確診斷出來的可能性也就越大。至此,實現對各項指標參量的計算與處理,在圖像識別原理的作用下,完成對皮帶運輸機故障自動診斷方法的設計。
3 實例分析
利用Windows虛擬機模擬如圖2所示的皮帶運輸機設備,在其傳輸皮帶與周圍隔板的連接處選取一節點作為故障行為節點,分別利用基于圖像識別的診斷方法、基于改進堆疊降噪自動編碼器的診斷方法對故障特征的表現行為進行檢測,其中前者作為實驗組、后者作為對照組。

圖2 皮帶運輸機模擬圖像
指標為故障行為節點處的訓練精度值,ψ2指標為故障行為節點處的測試精度值。對于皮帶運輸機元件而言,對其故障表現行為的診斷準確性由ψ1、ψ2指標共同組成,具體計算表達式如下:

表1記錄了實驗組、對照組ψ2指標的具體數值。
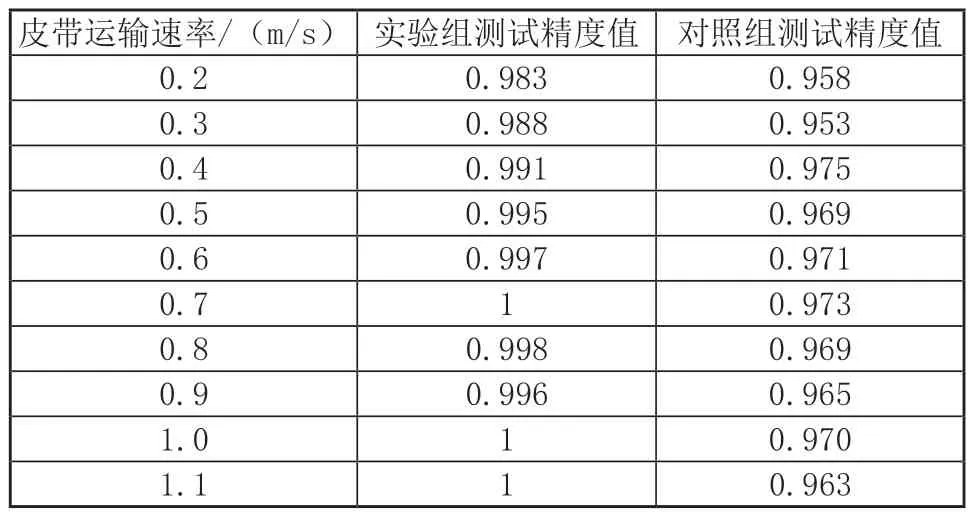
表1 ψ2指標記錄數值
表2記錄了實驗組、對照組ψ2指標的具體數值。
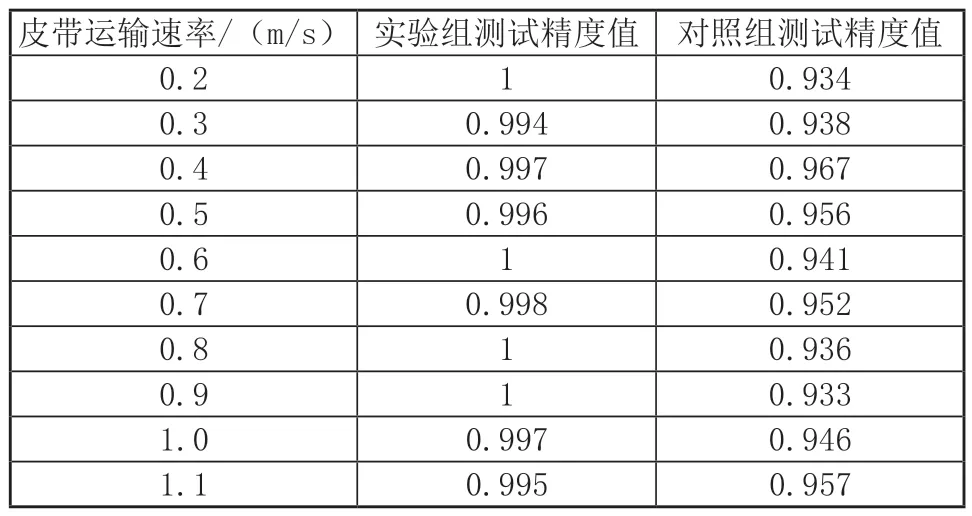
表2 ψ2指標記錄數值
以表1、表2中的記錄數據為依據,按照式(9)對皮帶運輸機故障表現行為的診斷準確度η進行計算。具體計算數值如表3所示。
實驗組:當皮帶運輸速率等于0.7m/s、0.8m/s時,實驗組診斷準確度(η指標)達到其最大取值結果99.8%;當皮帶運輸速率等于0.3m/s時,實驗組診斷準確度(η指標)達到其最小取值結果98.8%,與其最大值相比,二者之間的差值僅能達到0.1%。
對照組:當皮帶運輸速率等于0.4m/s時,對照組診斷準確度(η指標)達到其最大取值結果94.3%;當皮帶運輸速率等于0.3m/s時,對照組診斷準確度(η指標)達到其最小取值結果89.4%,與其最大值相比,二者之間的差值達到了4.9%,高于實驗組的極限數值差水平。
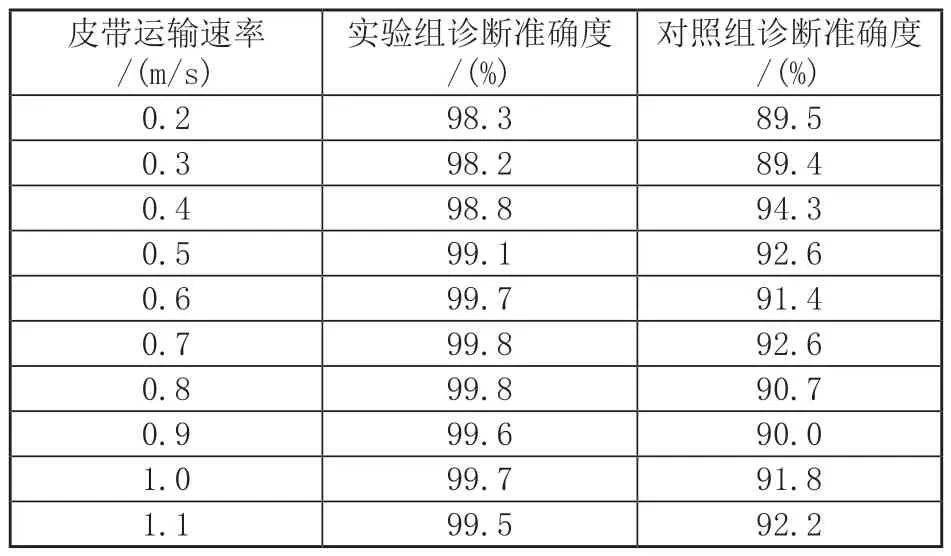
表3 η 指標計算數值
從平均值角度來看,整個實驗過程中,實驗組診斷準確度(η指標)的數值水平始終高于對照組。
綜上可知,本次實驗結論如下:
1)基于改進堆疊降噪自動編碼器的診斷方法對于皮帶運輸機故障表現行為的診斷準確度可以達到90%;
2)基于圖像識別的診斷方法對于皮帶運輸機故障表現行為診斷準確度的最大值超過了99%;
3)與基于改進堆疊降噪自動編碼器相比,基于圖像識別的診斷方法能夠更加準確的對皮帶運輸機故障表現行為進行診斷,在最大化延長機械元件設備的壽命周期方面具有更強的實用性價值。
4 結語
在圖像識別原理的作用下,新型皮帶運輸機故障自動診斷方法以固有模態函數作為切入點,根據動力學模型,對故障行為的振動特性進行統計,再聯合時域同步診斷系數,判別已知的皮帶運輸機故障特征。與基于改進堆疊降噪自動編碼器相比,這種新型診斷方法能夠對皮帶運輸機故障表現行為進行更加準確地判別,能夠穩定延長機械元件設備的壽命周期。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39
