三維點云關鍵點局部坐標系重構(gòu)方法研究
2022-06-29 01:31:16許振瑛晁建剛胡帥星
載人航天 2022年3期
許振瑛, 何 寧, 晁建剛?, 胡帥星
(1.中國航天員科研訓練中心, 北京 100094; 2.中國航天員科研訓練中心人因工程重點實驗室, 北京 100094)
1 引言
航天員利用混合現(xiàn)實系統(tǒng)進行在軌空間操作及地面訓練,獲取場景重構(gòu)模型與數(shù)字模型的準確匹配關系是混合現(xiàn)實場景實現(xiàn)虛實融合的關鍵。為獲取場景重構(gòu)模型,可采用點云匹配的方式融合混合現(xiàn)實系統(tǒng)深度傳感器各視角下的點云數(shù)據(jù)。點云匹配的本質(zhì)是估計傳感器的位姿變換,采用基于優(yōu)化的方法或基于特征點匹配的方法,其中基于特征點匹配的方法需要在關鍵點處計算特征描述符,由于傳感器姿態(tài)未知,關鍵點處的特征描述符易受角度影響,導致匹配失敗。
為提高特征點匹配成功率,文獻[6-8]采用在關鍵點處構(gòu)建局部坐標系(Local Reference Frame,LRF)以克服傳感器姿態(tài)的不確定性,描述子的旋轉(zhuǎn)不變性優(yōu)于不構(gòu)建LRF 的方法。 受制于點云噪聲、遮擋、分辨率等因素,目前并不存在同時滿足健壯性和可重復性的LRF 構(gòu)建方法。
構(gòu)造LRF 最直觀的方法為主成分分析法,但由于獲取各點云片段的視角不同,對應同一關鍵點處的鄰域點云分布不一致,導致該方法計算LRF 的可重復性僅約30%。 文獻[7-10]分別就LRF 構(gòu)建中的軸和軸計算提出了不同的改進方法,其中Novatnack 等首次以關鍵點處法向量為LRF 的軸,軸則通過對鄰域點云協(xié)方差矩陣特征值分解的方法獲得,該方法計算快捷,但計算軸的點云范圍過小,對噪聲敏感;Yang等仍然使用關鍵點法向量為軸,將計算法向量的鄰域范圍擴大了到鄰域點云半徑的13, 并且用鄰域點云投影向量的加權(quán)和計算軸,由于計算軸依賴于點云均勻采樣,不規(guī)則分布的點云嚴重影響該方法的可重復性;Petrelli 等提出了在關鍵點鄰域半徑為5 mr(Mean Resolution,點云平均分辨率)的范圍內(nèi)擬合平面的方法計算軸,軸則與鄰域內(nèi)法向量與軸夾角最大的點有關,并且針對點云遮擋問題提出了解決辦法,該方法對離群點敏感;Ao 等計算軸的方法與Yang 等一致,但通過對點云進行變換創(chuàng)新了軸的計算方法,軸的可重復性限制了該方法的性能。 鑒于上述方法,為提升LRF 的可重復性,本文提出了基于法向量 DBSCAN聚類(Density?Based Spatial Clustering of Applications with Noise,DBSCAN)的關鍵點鄰域點云LRF 重構(gòu)方法,實現(xiàn)穩(wěn)定可靠的LRF 估計,進而為后續(xù)計算具有旋轉(zhuǎn)不變特性的特征描述子提供前提,實現(xiàn)特征的準確匹配。
2 局部坐標系重構(gòu)
2.1 重構(gòu)方法概述
本文提出如下方法重構(gòu)關鍵點處局部坐{p∈R‖p-p‖,=1,…,n;標系:
1) 在含有n個點的點云片段內(nèi)隨機取一點為關鍵點,其中={p∈R=1,…,n} ;
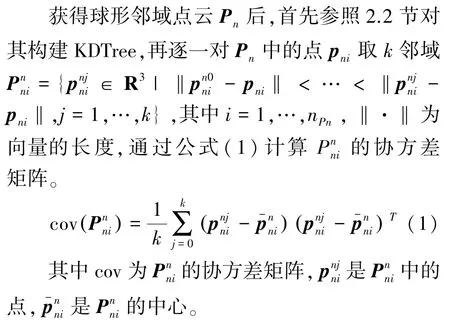
2) 利用KDTree方法提取點處半徑為的球形鄰域點云P,共n個點,其中P =
3) 計算P中各點p的法向量n,并記P的法向量集為N;
4) 利用DBSCAN 方法對法向量集N聚類,元素最多的非噪聲類其均值即為軸;
5) 結(jié)合軸對P進行變換后求得的第一主成分即為軸。
通過上述步驟,可以獲得關鍵點處的局部坐標系L =[,×,],選擇鄰域點并構(gòu)建局部坐標系的過程如圖1 所示。
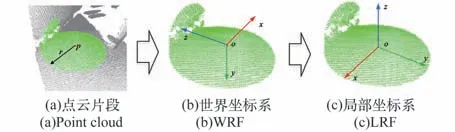
圖1 選擇鄰域點云并構(gòu)建LRFFig.1 Selection of neighborhood point and LRF con?struction
2.2 基于KDTree 方法的鄰域點云提取
本文采用KDTree 方法選擇關鍵點的球形鄰域點云。 點云數(shù)據(jù)構(gòu)建KDTree 的步驟為:
1) 分別對點云的,,軸數(shù)據(jù)計算方差,并獲取最大方差對應的坐標軸,記為axis;
2) 以axis軸數(shù)據(jù)為參考對點云數(shù)據(jù)排序,且令中位數(shù)為父節(jié)點,以垂直于axis軸且過父節(jié)點的平面為超平面平分點云數(shù)據(jù),將小于父節(jié)點的點云列為左子節(jié)點,其他為右子節(jié)點;
3) 對左右子節(jié)點遞歸執(zhí)行步驟1)和2),直至所有數(shù)據(jù)被劃分完畢。
KDTree 能夠加快搜索速度,記KDTree 根節(jié)點,關鍵點,查找范圍,則查找KDTree 的步驟為:
1) 計算關鍵點到根節(jié)點分割超平面的距離;
2) 若,則步驟3),否則步驟4);
3) 計算關鍵點到根節(jié)點的距離d,若d <r,則符合查找要求;否則4);
4) 查找的左(右)子節(jié)點,若左(右)子節(jié)點存在,則以左(右)子節(jié)點為, 遞歸執(zhí)行步驟1)~3),直至不存子節(jié)點。
通過上述方法,可以查找出關鍵點處范圍為的所有鄰近點p。
2.3 法向量估計
計算cov 的特征值并排序,其最小特征值為,對應的特征向量v,公式(2)計算了點p處的單位法向量:


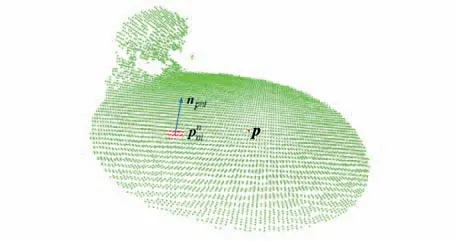
圖2 法向量估計Fig.2 Normal vector estimation
2.4 基于法向量DBSCAN 聚類的Z 軸估計方法
圖3(a)、圖3(b)和圖3(c)分別列舉了平面、折角和散亂點云和法向量及其在單位球面上的分布,平面和折角點云存在大量方向基本一致的法向量,其法向量在單位球上的分布相對集中;散亂點云法向量分布相對廣泛,其核心較為模糊。因此可以通過法向量的集中程度推測某方向的重要性。
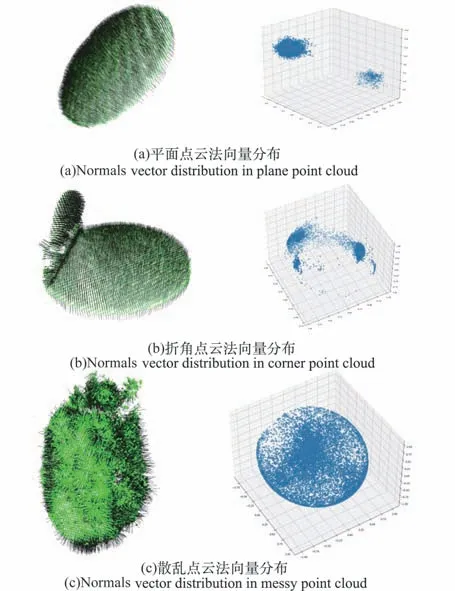
圖3 點云的法向量估計及其分布Fig.3 Normal vector estimation of point cloud and its distribution
DBSCAN 是一種基于密度的聚類方法,簇的數(shù)量只與點云密度分布相關,由于單位法向量在單位球面上的分布可看做點云,故步驟描述如下:
1) 任選一個未經(jīng)處理的法向量n,若其鄰域r內(nèi)點的個數(shù)小于min,則被標記為噪聲,否則被標記為核心樣本,并分配一個新的簇標簽C,將其所有鄰域法向量加入候選集C;
2) 對于候選集C中所有未處理的法向量n,若其鄰域r內(nèi)的法向量數(shù)小于min,則標記為噪聲,否則將其鄰域加入候選集C且將法向量n加入簇C;
3) 重復步驟2),直至候選集C為空;
4) 重復步驟1 ~3,直至處理完畢所有法向量。
將上述過程標記為DBSCAN,如公式(3)所示,




DBSCAN 聚類方法存在缺陷,即:若法向量分布過于散亂而不滿足聚類條件,則方法失效。 此時采用協(xié)方差矩陣特征值分解計算軸。
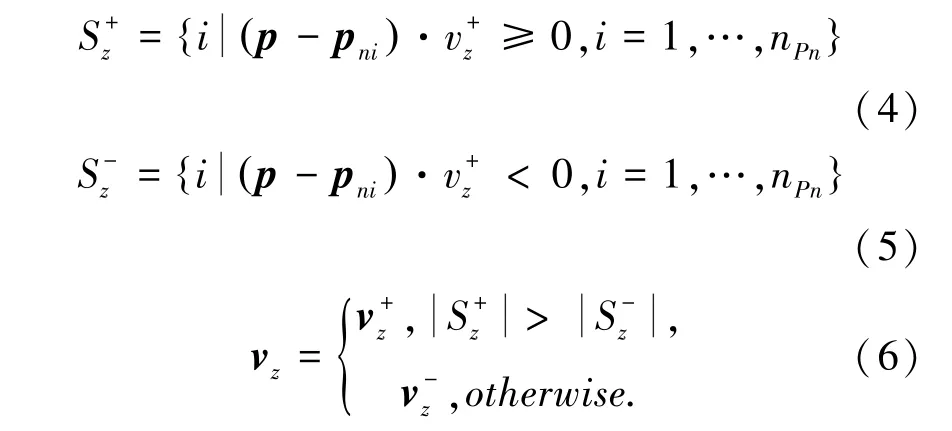
2.5 局部坐標系x 軸估計
由于噪聲、遮擋等原因,軸的確定較軸復雜許多。 本文采用對球形鄰域點云進行變換后求第一主成分的方法確定軸,解決局部點云有效信息不足導致的軸估計一致性差的問題
為降低數(shù)據(jù)的復雜度,首先將球形鄰域點云P投影到軸的切平面, 記為′, 如圖4所示。
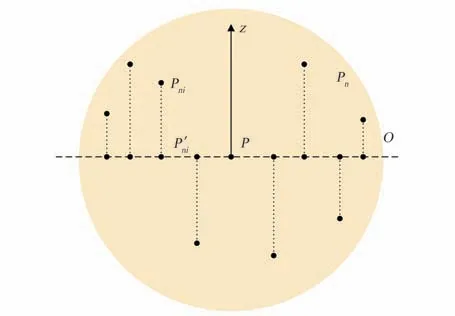
圖4 鄰域點云在z 軸切平面上的投影Fig.4 Project points on orthogonal plane of z-axis
其中,p為鄰域中某點,′為p在上的投影,〈·〉 為向量內(nèi)積,假定球形鄰域點云中心為原點,則:

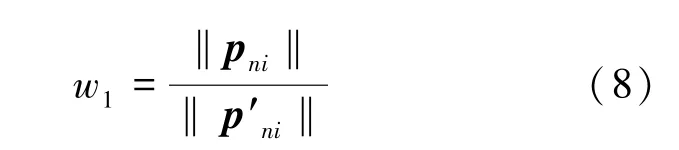
投影后失去了立體特征,本文提出3 種權(quán)重因子將點′進行變換,分別表示為、和′。代表了p到中心點的距離(此處為避免‖′‖ 為0 的情況設定‖′‖ 最小為0.001),即距離越遠的點越能為軸的方向做出貢獻:
為點的法向與軸的內(nèi)積,即軸越大的點越能為軸的方向做出貢獻:

′是′的集合,′是點的法向在軸切平面上的投影,加強與軸方向不相同的點對軸方向估計的權(quán)重為式(10):

p轉(zhuǎn)換后的點為式(11):


局部坐標系可表示為式(12):

3 實驗驗證
3.1 實驗目標、比判準則與數(shù)據(jù)選擇
1)實驗目標。 評估上述方法在局部坐標系構(gòu)建中的重復性。
為實現(xiàn)上述目標,本文在與點云片段有重疊區(qū)域的點云片段={q∈R|=1,…n} 中獲取關鍵點的對應點并分別構(gòu)建局部坐標系L和L,已知和間的轉(zhuǎn)換為,即=·,則L=·L +,其中為殘差。 本文采用公式(13)計算軸和公式(14)計算局部坐標系間的絕對誤差。
其中,ε為軸間的旋轉(zhuǎn)誤差角度,為局部坐標系間的旋轉(zhuǎn)誤差角度,誤差角度越小則匹配精度越高。
2)比判準則。 本文以10°為標準統(tǒng)計匹配正確率,誤差角度小于該標準即認為匹配正確。
3) 數(shù)據(jù)選擇。 本文選用 3DMatch、SpaceTime 和Registration 數(shù)據(jù)集評估軸和局部坐標系重構(gòu)的重復性。
針對空間站艙內(nèi)三維重建場景匹配問題,上述所選數(shù)據(jù)集包含了色彩和深度信息,符合重建匹配應用場景需求;其中3DMatch 數(shù)據(jù)集為室內(nèi)場景,保證驗證數(shù)據(jù)與應用背景具有相似性;SpaceTime 數(shù)據(jù)集采用SpaceTime Stereo 技術(shù)獲取,為雙目立體視覺,Registration 數(shù)據(jù)集由Kinect設備獲取,為ToF 深度,保證驗證數(shù)據(jù)適用不同數(shù)據(jù)來源。
3.2 關鍵參數(shù)設置
分別對各數(shù)據(jù)集隨機取1000 對重合點測試并統(tǒng)計正確率,每次測試的參數(shù)保持一致:鄰域點云半徑取15 mr;估計法向量鄰域范圍=10,即附近10 個點; DBSCAN 聚類掃描半徑r =sin (5·π180) , 最小包含點數(shù) min =max([n]100,5) 。
3.3 z 軸重復性測試與對比
以圖5 為例,左右側(cè)分別為空間內(nèi)同一點處不同視角下的球形鄰域點云,圖5(a)為點云原始數(shù)據(jù),可見不同視角下的點云存在差異;圖5(b)估計了點云所有點的法向量;圖5(c)對法向量進行了聚類,其中屬同簇的法向量顏色相同,黑色為離群點;圖5(d)將點云中心移至原點并添加了軸(向上軸為軸,其余軸未約束,僅用于表征軸切平面)。
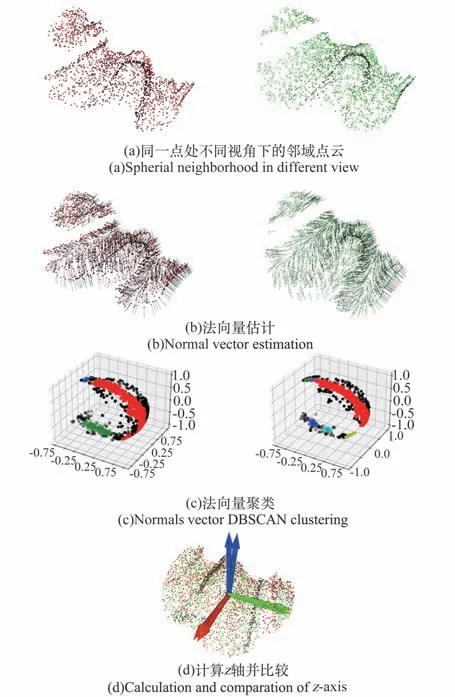
圖5 基于聚類的z 軸計算Fig.5 Calculation of z?axis based on DBSCAN Clus?tering
為評估本文軸計算方法的性能,本文與文獻[7-10]方法進行了對比,結(jié)果如表1 所示。
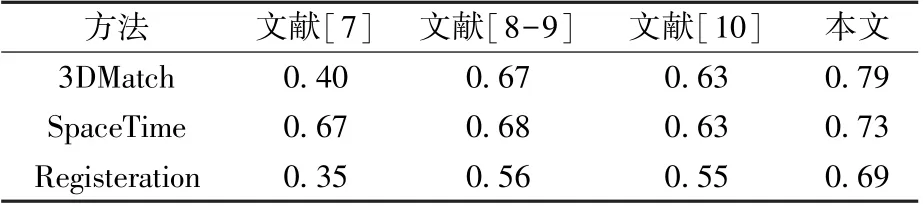
表1 z 軸估計重復率對比Table 1 Comparation of repetitive rate of z-axis Estimation
可見,本文突出連續(xù)光滑曲面上點云的法向量有利于提高軸估計的重復性。
3.4 LRF 重復性測試與對比
圖6 以某一鄰域點云為例,對確定軸后的點云應用本文方法進行轉(zhuǎn)換,其中圖6(a)為原始點云,原始點云存在較大差異,圖6(b)為轉(zhuǎn)換后點云,可見原始圖像中的差異性被弱化,法線平行于軸方向的點云被集中,同時保持了法線垂直于軸方向點云的離散度,本例LRF 構(gòu)建誤差為4.6°。
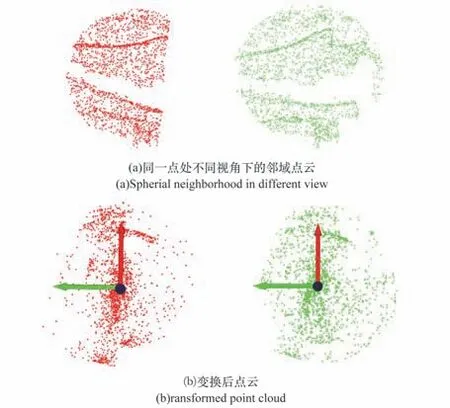
圖6 點云轉(zhuǎn)換Fig.6 Point cloud transformation
為對比本文LRF 估計方法的性能,本文與文獻[7-10]方法進行了比較,結(jié)果如表2 所示,本文方法在所選數(shù)據(jù)集上達到了最高重復率,平均為0.44。
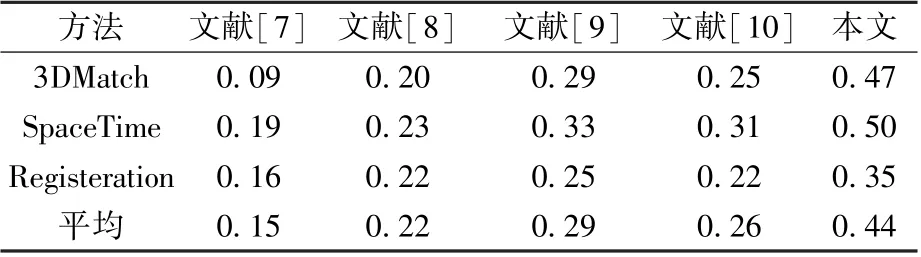
表2 LRF 估計重復率對比Table 2 Comparation of repetitive rate of LRF estima?tion
本文方法在不同數(shù)據(jù)集上測試了不同權(quán)重因子組合,其重復率如表3 所示,組合因子的重復率優(yōu)于單個因子。

表3 不同權(quán)重因子組合對比Table 3 Comparation of different weight factor combinations
4 結(jié)論
本文提出了一種在關鍵點球形鄰域點云計算LRF 的方法,通過法向量聚類求得軸,對鄰域點云變換后求第一主成分獲得軸。 利用公開數(shù)據(jù)集替代航天員混合現(xiàn)實訓練真實環(huán)境點云并對比測試,試驗結(jié)果表明本文所提方法在單軸和坐標系的正確率指標均優(yōu)于其他方法。
由于本文所提方法計算量較大,相比其他方法需要更多計算資源,后續(xù)工作可考慮如何提高計算效率;本文所提方法可以用于計算三維點云的旋轉(zhuǎn)不變特征描述子。
猜你喜歡
中學生數(shù)理化·中考版(2022年12期)2022-02-16 07:36:56
今日農(nóng)業(yè)(2021年8期)2021-11-28 05:07:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
河南畜牧獸醫(yī)(2016年24期)2016-11-29 01:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國衛(wèi)生(2014年2期)2014-11-12 13:00:16
語文知識(2014年7期)2014-02-28 22:00:26