基于電流體動力學的微液滴噴印系統
2022-06-29 06:08:26夏睦威劉威
電子設計工程 2022年12期
關鍵詞:系統
夏睦威,劉威
(武漢大學物理科學與技術學院,湖北武漢 430072)
早期的液滴噴印技術主要有高速攪拌法、逐層組裝法和界面聚合燈法,這些傳統的液滴噴印技術均采用推擠式的驅動方式。這種驅動方式所產生的能量有限,隨著噴嘴尺寸的減小,噴印液滴所需要的壓力增大,而液體粘度則使噴嘴更容易發生阻塞,也難以實現高分辨率的噴印。
電流體動力學噴印技術是一種制備微液滴的新技術。這種技術由于可以用較大的針頭實現高分辨的噴印,能有效降低堵頭的風險。使用這種技術的設備結構簡單、容易操作,例如目前已經商業化的微滴式數字PCR(Polymerase Chain Reaction,聚合酶鏈反應)系統,在藥物篩選、細胞檢測、臨床診斷等方面有著廣泛的應用[1-3]。PCR 因獨特的核酸體外擴增能力,成為生命科學及現代分子生物學領域的支撐技術[4]。
基于現有微液滴噴印技術存在的缺陷,文中提供一種操作簡單,能夠利用單根針管一次噴印大量獨立在接收板上互不相融的微液滴的噴印系統。該系統的XY 平臺控制模塊由基于“Visual Studio 2015”環境開發的上位機用戶操作界面控制,能夠實現噴印位置的精準定位。該系統還附帶相機檢測模塊,用于幫助操作人員直觀、方便地觀察微液滴的噴印情況。
1 微液滴噴印模塊框架設計
微液滴噴印模塊的功能主要為微液滴的生成、分割、融合[5]。微液滴噴印模塊包含背壓控制裝置、微液滴的發射與接收裝置和電場發生裝置。噴印系統結構如圖1 所示,噴印系統具體結構示意圖如圖2所示。
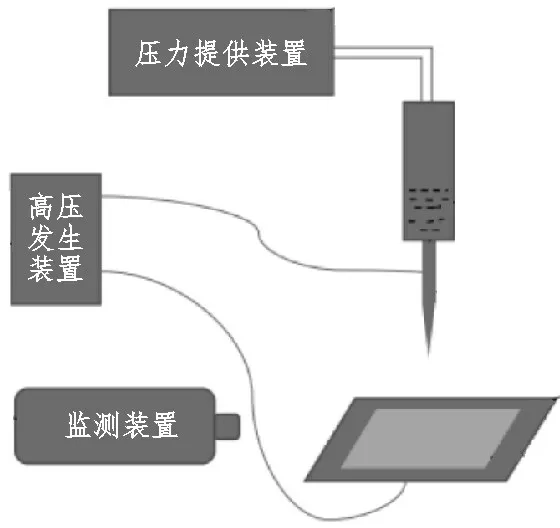
圖1 噴印系統結構示意圖
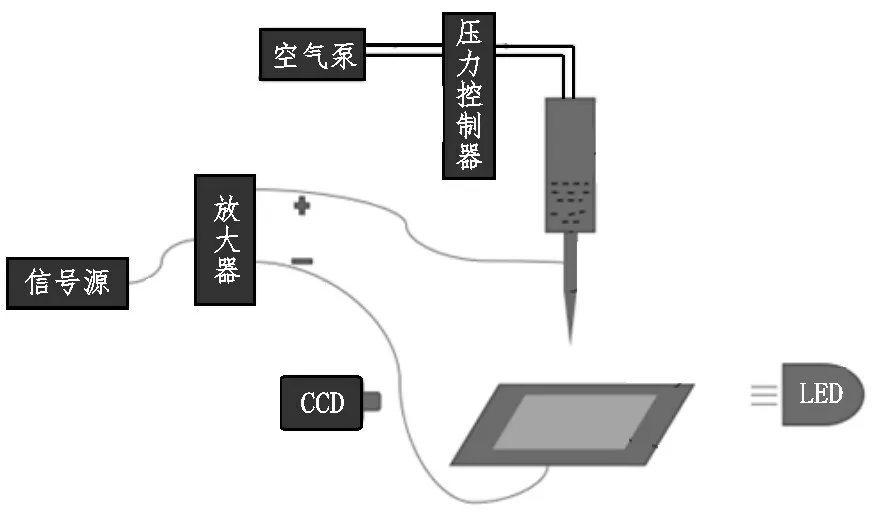
圖2 噴印系統具體結構示意圖
系統噴印微液滴的過程可描述為向原料試劑中添加適量表面活性水試劑,接著將試劑注入針管內,通過控制微液滴噴印裝置的壓力提供裝置來給針頭提供背壓。在背壓的作用下,針頭中的原料試劑被擠向針尖處。高壓發生裝置產生一定的電壓,并加在針頭和下電極板之間形成電場。在電場的作用下,針尖處液滴的半月板被拉伸并形成泰勒錐,最后粉碎成大量微液滴,被收集于下電極板表面的接收油試劑上。由于表面活性水試劑和接收油試劑的作用,大量微液滴在收集之后不會融合,最終形成大量相互獨立的微液滴[6]。
1.1 背壓控制裝置
背壓控制裝置主要由空氣泵、精密氣壓控制器和空氣管道組成。空機泵是一個空氣壓縮機,通過對空氣壓縮提供一個高壓的空氣流,該高壓空氣輸入到精密氣壓控制器的輸入口,氣壓經過調整之后按照需求輸出指定壓強值氣壓到針頭,實現恒壓進料。
精密氣壓控制器選用日本SMC 公司的電氣比例閥ITV0000 系列的產品,具體型號為ITV003,電壓為DC 0~5 V。該壓力控制器輸入氣壓大于0.5 MPa,在輸入直流電壓的控制下,可以精確控制輸出氣壓在0.000 1~0.5 MPa 之間。該電氣比例閥的原理框圖如圖3 所示。
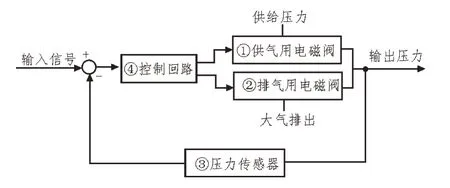
圖3 電氣比例閥原理框圖
1.2 微液滴的發射與接收裝置
微液滴的發射與接收裝置主要由試劑腔、導電針管、下電極板和接收油試劑組成。在微液滴的發射與接收模塊中,原料試劑被存儲在試劑腔中。在背壓的作用下,試劑被推到導電針管中并在針頭形成待發射的液滴,油面接收板位于針頭的正下方5~10 mm 左右,用來接收微液滴。由于微液滴是在電場驅動下噴射出來,因此需要建立電場。電場的建立需要兩個電極,上電極直接由不銹鋼針管充當,下電極通過一個5 cm×10 cm 大小的覆銅板實現。通過在針頭和覆銅板之間加上高壓,就可以在針頭和覆銅板之間形成電場,從而驅動微液滴的形成。由于針頭內徑的大小與噴出來的微液滴的直徑大小成正相關,為了實現盡可能小的液滴直徑,采用32G 的針頭,即內徑90 μm、外徑0.24 mm。
1.3 電場發生裝置
電場發生裝置主要由信號源、高壓放大器和屏蔽線組成。電場發生裝置中信號源輸出一個疊加一定直流的脈沖信號,該信號經高壓放大器放大至數千伏之后將正極接至導電針管上,負極接至下電極板上,進而在針頭和接收板之間形成一定強度的電場。在直流電壓形成的電場作用下,試劑中的正電荷不斷積聚在針頭上待噴印的液滴表面,并且液滴表面的半月板被拉伸形成泰勒錐,在隨后脈沖電壓的作用下,液滴墜落并最終粉碎成大量微液滴被收集于接收油試劑上。
信號源采用的是RIGOL 的數字信號發生器DG1062,該信號發生器可以輸出正弦波、方波等周期性波形,還可以輸出直流信號。
高壓放大器選用的是美國TREK 公司的model 610E 信號高壓放大器,該儀器不僅支持最大1 000倍放大輸入信號,還可以直接用作高壓電源或高壓控制器。由于該系統所需要的控制電壓波形比較復雜,因此只用該裝置來放大來自信號源的信號。
2 相機監測模塊
相機監測模塊主要由LED 燈和CCD(Charge Coupled Device,電荷藕合器件圖像傳感器)組成,相機監測模塊的CCD 成像系統用于精準捕捉微液滴的形成及斷裂過程,對研究影響微液滴噴印參數有十分重要的意義[7]。該監測相機為一個有放大功能的顯微相機。
3 XY平臺控制模塊
微液滴噴印裝置中的XY 平臺控制系統基于GitHub 上開源控制系統GRBL 設計而成,主要完成了對G 代碼的解析和直線及圓弧插補運動控制的實現。以下將詳細地介紹XY 平臺控制模塊的總體設計及構成。XY 平臺控制模塊總體設計流程如圖4所示。

圖4 XY平臺控制模塊總體設計流程
3.1 上位機用戶界面
該設計以Microsoft 公司推出的“Visual Studio 2015”作為開發環境,進行上位機調試軟件的開發。
該系統專用的上位機調試軟件操作界面由串口通信模塊和各部分功能模塊組成。上位機的主要功能是通過串口給下位機發送G 代碼,下位機控制電機運動,并且監測電機的實時位置,反饋到上位機中顯示。下位機接收到G 代碼之后,通過算法解析G代碼的具體指令,并翻譯成電機控制參數,從而控制XY 二軸運動平臺按照預定好的軌跡運動,實現XY平臺的準確移動。
3.2 下位機軟件
下位機主要負責接收并解析上位機發來的G 指令,最終控制XY 平臺的準確移動。下位機的控制器使用正點原子的戰艦開發板,MCU型號為STM32F407。該系統是在GitHub 上開源的運動控制系統GRBL 的基礎上設計開發的,因此整個下位機軟件的核心就是GRBL 控制代碼。其中最主要的幾個文件包括底層串口通信模塊文件、系統狀態切換控制模塊文件、G 代碼解析執行模塊文件、運動控制模塊文件、運動速度規劃模塊文件和電機驅動執行模塊文件。
3.2.1 USART串口收發控制
系統中上位機和控制板之間的數據通信是通過串口來實現的。單片機的串口模塊主要完成兩個功能:
1)在接收數據時,上位機上的G 代碼或系統指令通過串口發送到STM32F407 單片機。單片機接收到數據之后會觸發串口接收中斷,在接收中斷中根據接收到的數據類型執行兩個動作:如果接收到的是系統指令,則直接執行相應的動作,執行完退出;如果接收到的數據不是系統指令(G 指令代碼),則將接收到的數據存入接收循環隊列里面,等待下一個模塊取出數據執行下一步操作。
2)在發送數據時,當單片機需要向上位機反饋一些必要消息時,先將數據存入串口發送循環隊列,如果隊列非空,則開啟串口發送寄存器空中斷,觸發串口發送中斷,在中斷中發送相應的反饋信息,直到發送隊列的數據發送完畢,關閉發送寄存器空中斷。
3.2.2 協議解析
整個GRBL 軟件控制系統的運轉是通過一個系統狀態處理模塊來實現的,這部分的控制由protocol模塊完成。該模塊主要完成兩個功能:
1)獲取G 代碼命令幀。在串口模塊中,串口接收到G 指令代碼之后只是將代碼字符連續不斷地存放在接收隊列中。協議解析模塊需要讀取出接收隊列中的數據,并按照一定的規則解析出一條完整的G 代碼命令幀,之后將這一幀完整的G 指令交由G 代碼解析模塊解析并執行。
2)在串口接收隊列中的所有數據都處理完畢后,便進入系統狀態的處理模塊中,該模塊根據系統的狀態執行相應的動作或者切換相應的狀態。
3.2.3 G代碼解析
在協議解析模塊中提取出一幀完整的G 指令之后,就調用G 代碼解析模塊。G 代碼解析模塊主要完成3 個功能:
1)一行完整的G 代碼主要由字母和數字組成,每一個字母和每一個數字所表達的含義都有所不同,因此首先需要根據當前獲取的字母和數字分別解析其對應的具體含義或所表示的具體動作,并將解析結果存儲起來。
2)在按照字母和數字分別解析完各自含義之后,需要作校驗處理,比如在運動之前需要先指定運動速度等。一條G 指令的正常執行需要滿足一些基本的條件,因此需要提前作校驗處理。同時為了防止錯誤G 代碼的出現,也需要作檢驗處理以排除一些出錯的情況。
3)在解析并校驗完成之后,一行完整正確的G代碼便解析結束,下面需要執行這些指令。具體執行過程為利用解析完成后得到的動作參數調用對應的函數。
3.2.4 運動控制模塊
G 代碼解析之后得到的具體動作主要是設置參數型的動作和執行相應運動軌跡的動作。設置參數型的動作相對比較好處理,直接在G 代碼解析模塊中即可完成,而執行相應運動軌跡的動作比較復雜,需要單獨的模塊來處理。
G 代碼的運動模式指令主要包括快速定位、直線插補、圓弧插補。而快速定位直接用直線插補來代替,因此運動模式主要是直線插補和圓弧插補兩種。GRBL 運動控制系統實現圓弧插補的思想是先將圓弧拆分成多個細小的直線段,再通過直線插補來執行這些小線段,從而完成圓弧插補。一條帶執行的線段主要包含兩個參數:運動速度和線段終點。一條線段要具體執行還需要對其速度作加、減速規劃處理,這些由專門的運動速度規劃模塊實現。因此在運動控制模塊中,直線插補函數并不只是獲取一條線段,而是需要調用速度規劃模塊來作進一步處理。綜上可知,在運動控制模塊中,如何實現將圓弧拆分成多條小線段是重點。
3.2.5 運動速度規劃模塊
由于XY 平臺的機械結構是一種剛性材料,在運動過程中如果出現速度突變就有可能出現振動的情況,最終會導致運動軌跡出現較大誤差。其次,如果等到每次運動結束且電機停止之后再開始下一次運動,這樣雖然不會出現振動,但是執行完所有運動所需要的時間就會大大增加。因此,為了獲得誤差較小的運動軌跡,同時又盡可能地提高執行速度,必須對每條直線的運動速度作規劃。GRBL 運動控制系統實現了一種梯形的速度規劃,總體上一條線段經過加速、勻速和減速3 個過程,同時,前一條線段和后一條線段在交接點處速度相等,即前一次運動的末速度等于后一次運動的初速度。
3.2.6 運動控制實現模塊
經過G 代碼解析、運動控制和速度規劃等過程之后,就獲得了可被執行機構執行的具體參數,包括初速度、最大速度、總位移、各軸運動的位移或者脈沖數、減速點等。在獲取這些參數之后,輸出相應的脈沖給伺服驅動器,最終實現對執行機構的控制。
4 電流體動力學微液滴噴印原理
4.1 電流體動力學液滴噴印模式
研究表明,噴印的過程受液體的物理性質影響,如表面張力、粘度、密度和電導率等[8],并且還取決于針頭直徑、施加的電壓大小和氣壓控制器電壓值這些影響因素的共同作用[9]。根據針頭液面形狀和射流時液體的幾何形狀進行具體分類,可分為10 種噴印模式。如圖5 所示,10 種噴印模式分別為滴落模式、微滴模式、紡錘體模式、多紡錘體模式、擺動模式、旋進模式、對稱曲張錐射流模式、扭結錐射流模式、分支錐射流模式、多股射流模式[10]。
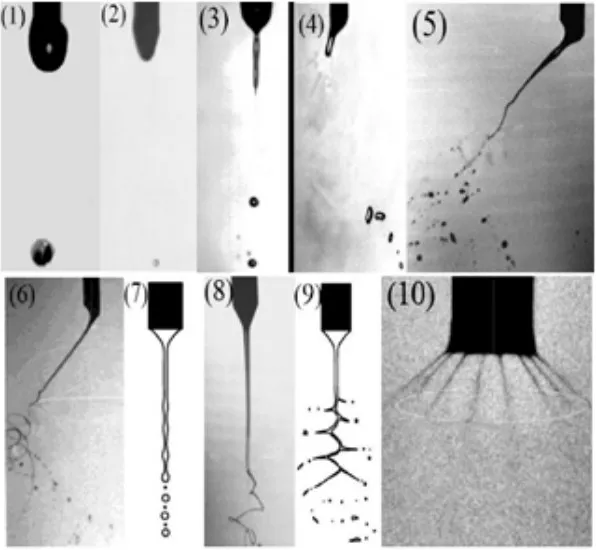
圖5 電流體動力學噴印的10種模式
對于近電場下微液滴的精準噴印,出于保障噴印精準度的目的,微液滴噴印系統一般選用射流前端豎直向下或單滴垂直下落的模式,即微滴模式、紡錘體模式和錐射流模式[11]。
4.2 影響微液滴噴印工藝的關鍵參數
在微液滴噴印工藝中,原料試劑以單一液滴形式穩定噴印是保證噴印質量的必要條件[12]。噴印模式會受到多種工藝參數的綜合影響[13],其中影響微液滴噴印穩定性和精度的關鍵參數有液體性質、起始電壓值、電壓上限值、氣壓控制器電壓值、針頭離板距離、針頭尺寸[14]。
該系統在關鍵參數上的具體數據如下:液體性質為礦泉水溶液,起始電壓值為2 kV,電壓上限值為10 kV,氣壓控制器電壓值為1 V,針頭離板距離為5 mm,針頭內徑為90 μm。
5 成果展示
經過大量實驗與參數調試,最終實現使用內徑為90 μm 的針頭,噴印出直徑為30 μm 左右的微液滴。噴印模式可選擇連續模式和離散模式。連續模式下任意兩滴微液滴噴印的時間間隔很短,噴印效果為微液滴能夠形成連續的線條。離散模式下任意兩滴微液滴噴印的時間間隔較長,噴印效果為大量互相分離的微液滴。
6 結束語
文中主要研究目標是開發一套基于電流體動力學的微液滴噴印系統,已完成了微液滴噴印模塊的搭建、相機監測模塊的搭建和XY 平臺控制模塊的設計開發等工作。該系統中微液滴噴印模塊目前實現的功能為噴印最小直徑30 μm 的微液滴,并且具有離散噴印和連續噴印兩種噴印模式;XY 平臺控制模塊實現的功能為控制微液滴噴印的精準定位與運動軌跡。
該研究不足之處在于,理論上,用EHD 方法噴印的微液滴直徑能夠比針頭內徑小一個數量級以上[15]。而在使用內徑90 μm 噴頭的情況下,噴印微液滴最小直徑為30 μm,因此理論上該方法噴印的微液滴直徑大小可以進一步縮小。相機監測模塊目前只實現幫組操作人員方便觀察的功能,未來的升級方向為通過神經網絡實現圖像處理與優化微液滴噴印工藝的功能。例如利用基于全連接神經網絡的DOD噴印參數多目標優化設計方法開發星形液滴產生模型并減小液滴直徑,提高液滴速度[16];還可以利用語義分割神經網絡實現微液滴的計數及大小測量等功能,提高整個系統的自動化程度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32