基于數據感知技術的心理健康狀態實時跟蹤研究
2022-06-29 06:08:40李盼盼梁豐彭虎軍
電子設計工程 2022年12期
李盼盼,梁豐,彭虎軍
(商洛學院健康管理學院,陜西商洛 726000)
隨著現代化社會的不斷發展,人類的心理健康逐漸成為計算機領域研究的重點,以計算機科學作為研究工具,將心理學涉及的外顯表達轉換為數據表達,在心理測量學的參與下,規范心理健康狀態數據獲取成為一個科學、客觀、規范的過程[1]。在認知神經科學不斷興起的背景下,傳感技術逐漸應用在心理狀態監測過程中,并逐漸衍生出了多種智能感知產品,用于實時獲取佩戴者的心理狀態數據,判斷佩戴者的心理狀態[2]。激光傳感器處理精度高、傳輸速度快,符合健康狀態監測的實時性要求,為此,使用激光傳感器感知人體的心理健康狀態數據,構建一個實時跟蹤過程[3-4]。國外在研究心理健康狀態實時跟蹤數據方面較早,早在十九世紀,美國心理學家就已構建了初步數值化的心理狀態判斷方法,在現代化科學技術的支持下,各個科技公司已研制了多種心理狀態實時跟蹤裝置[5-6]。國內對于心理健康狀態數值化研究起步較晚,在西方構建技術的影響下,在上個世紀末期,逐步建立起具有我國特色的心理研究技術。
1 心理健康狀態跟蹤
1.1 轉化激光傳感器感知數據
使用激光傳感器采集心理狀態數據。在轉化心理狀態數據時,以激光傳感器發出的激光束為對比標準[7-8],將心理狀態數據轉換為直角坐標的表現形式,其變換過程如圖1 所示。

圖1 轉換心理狀態數據過程
在數據轉換過程中,Pi(di,θi)表示激光傳感器采集的第i個心理狀態數據,根據激光測距儀的角度數值,心理狀態數據的θi可表示為:

在θi數值的控制下,心理狀態數據的變換直角坐標可表示為:

受到人類生理狀態的影響,將心理狀態數據轉換為直角坐標后,會產生一部分的偏移量[9]。在式(2)的基礎上,設定X軸與Y軸的偏移量,構建心理狀態數據補償過程,可表示為:

其中,代表補償后X軸的坐標;代表補償 后Y軸的坐標;a、b分別表示X軸與Y軸的偏移量。
在上述處理過程的基礎上,對心理狀態數據進行分割-聚合處理,將其劃分為7 個線性區域[10],結果如圖2 所示。將圖2 所示的線性區域作為心理狀態數據處理區域,構建心理狀態數據判斷方程。
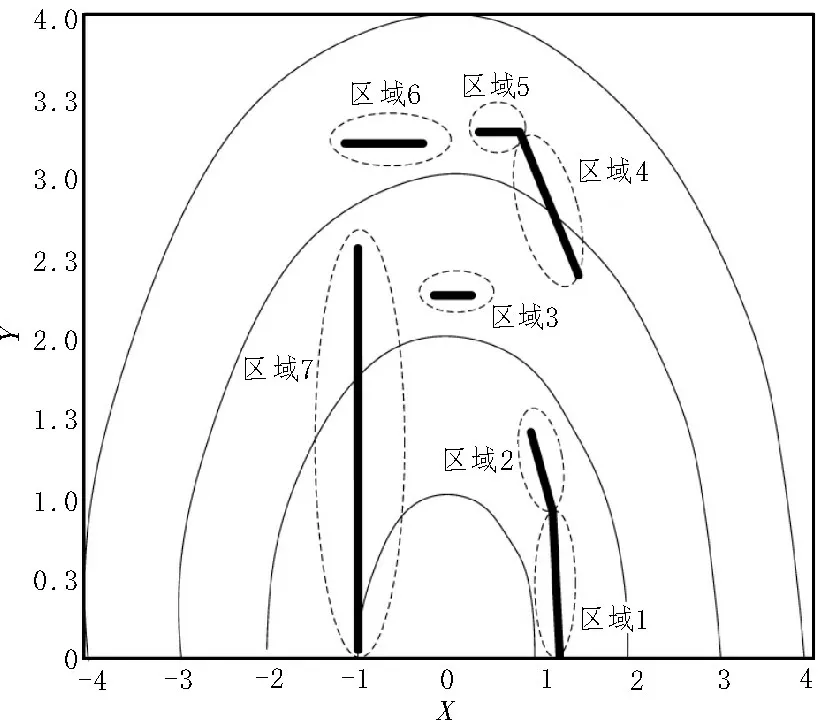
圖2 劃分得到的線性區域
1.2 構建心理健康狀態數據判斷方程
以圖2 劃定的線性區域作為判斷處理目標,根據處理區域中數據量的多少,確定區域中的狀態數據稀疏因子[11-12],稀疏因子可表示為:

其中,βi表示數據的線性區域。
為消除數據中的噪聲干擾[13],歸一化處理上述得到的稀疏因子后,構建一個心理狀態數據的置信度計算方程,計算公式可表示為:

其中,J表示線性區域在Y軸的長度數值,M表示線性區域在X軸的長度數值,φi表示偏移參數。在式(4)稀疏因子數值的影響下,心理狀態數據的置信度數值變化如圖3 所示。
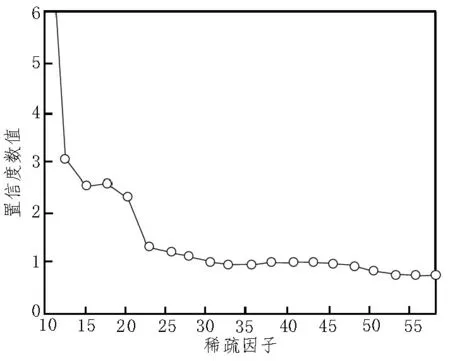
圖3 置信度數值的變化
在圖3 的置信度變化下,構建心理健康數據的似然值,計算公式可表示為:

其中,zt表示不同時間尺度下的心理數據數值。根據似然數值計算出尺度系數,最終得到不同尺度下的狀態數據判斷方程,可表示為:
其中,max{J,M} 表示劃定心理數據區域的最大尺度數值。依據心理狀態判斷過程完成數據類型的判斷,將其分為兩組,分別為正常數據組及危險數據組。根據兩種狀態數據的特性[14-15]實現心理數據的實時跟蹤。
1.3 實現狀態實時跟蹤
以兩組心理健康狀態數據作為處理對象,計算兩個數據組合中狀態數據的最大狀態數值,計算公式可表示為:

其中,N表示正常心理狀態數據的數量,S表示危險心理狀態數據的數量,pi,j(x) 表示最大數值函數。
根據數據表現出的數值大小,將大數值對應的狀態數據劃分為危險狀態數據組,將小數值對應的狀態數據劃分為正常狀態數據組[16]。在實時跟蹤過程中,將數據作為心理因子,以量化計分規則處理因子為跟蹤標簽,追蹤方程可表示為:

其中,xn表示跟蹤標簽,xi表示心理狀態數據。
將心理健康狀態數據整合為特征模塊,依據跟蹤標簽處理過程實現狀態特征的實時獲取,將上述兩個層級進行整合,構建一個分類器模塊[17-18],最終實現對健康數據的實時跟蹤。綜合上述處理,最終完成對基于數據感知技術的心理健康狀態實時跟蹤方法的研究。
2 仿真實驗
2.1 實驗準備
準備一個型號為Dimetix-DPE-10-500 的激光傳感器,使用的傳感器參數如表1 所示。

表1 使用的傳感器參數
使用表1 所示參數控制下的激光傳感器,設定心理狀態為安全、危險兩種狀態,同時設定5 組心理健康狀態數據,一組數據中分別放置5 個安全心理健康狀態數據和5 個危險狀態數據,設定實驗數據如表2 所示。
在表2 設定的心理狀態數據下,分別使用傳統心理狀態實時跟蹤方法、文獻[13]中的心理狀態實時跟蹤方法、文獻[18]中的心理狀態跟蹤方法以及文中設計的心理狀態跟蹤方法進行實驗,對比4 種心理狀態實時跟蹤方法的性能。
2.2 結果及分析
基于上述實驗準備,控制4 種實時跟蹤方法處理表2 的心理狀態數據,以實驗準備的兩個狀態數據作為計算對象,構建心理狀態成功率計算公式,可表示為:
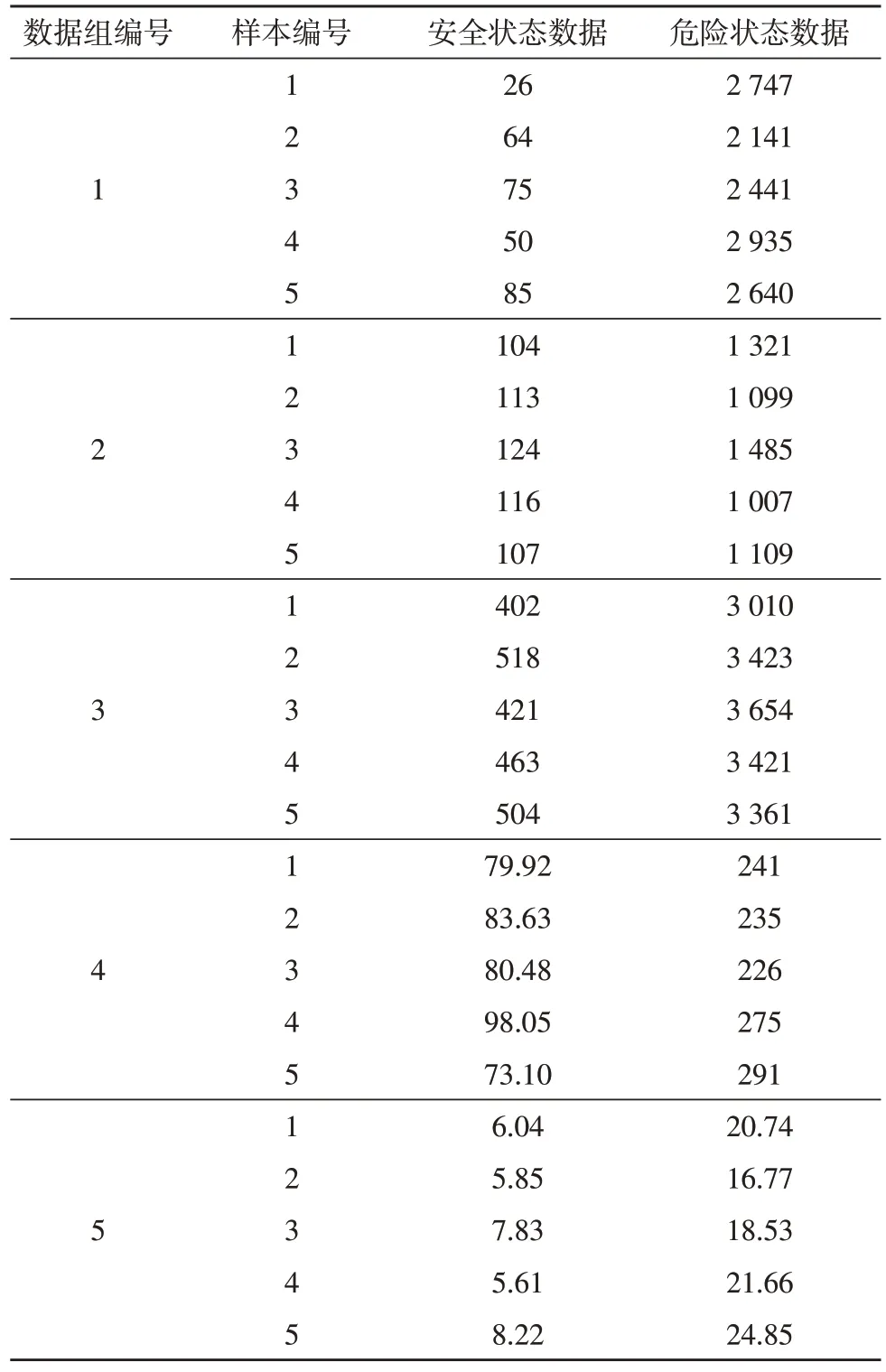
表2 設定的實驗數據

其中,r1表示正常狀態的心理健康數據,ra表示危險狀態的心理數據。統計并匯總上述計算得到的心理健康數據跟蹤的正確率,結果如表3 所示。由表3 所示結果可知,在4 種不同的實時跟蹤方法的控制下,傳統跟蹤方法最終得到的跟蹤正確率在63%左右,數值最小。文獻[13]中的實時跟蹤方法跟蹤正確率在77%左右,數值較小。文獻[18]中的實時跟蹤方法的跟蹤正確率在84%左右,數值較大,而文中設計的實時跟蹤方法最終得到的跟蹤正確率結果在96%左右,與前述3 種現有的實時跟蹤方法相比,其正確率數值最大。

表3 4種跟蹤方法狀態跟蹤正確率結果
保持實驗環境不變,以上述得到的正確跟蹤過程作為統計對象,測量正確跟蹤過程所需的時間,計算4 種跟蹤方法最終的跟蹤速度,結果如圖4 所示。由4 圖結果可知,在4 組實時跟蹤方法的控制下,控制相同數量的實驗數據組,文獻[18]中的實時跟蹤方法最終的跟蹤速度為5 組/秒,傳統跟蹤方法跟蹤速度為2.5 組/秒,文獻[13]中的跟蹤方法的跟蹤速度為10 組/秒,而文中設計的跟蹤方法的最終跟蹤速度為13 組/秒,與3 種實時跟蹤方法相比,文中設計的實時跟蹤方法的跟蹤速度最大。
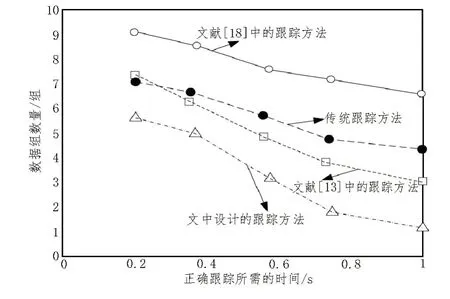
圖4 4種跟蹤方法跟蹤速度
在上述實驗環境下,定義實驗準備階段的數據為心理健康狀態的總數據,當4 種實時跟蹤方法輸出的數據比總數據數量少時,統計4 種實時跟蹤方法最終丟失的數據數量,結果如表4 所示。由表4 結果可知,4 種實時跟蹤方法對于相同數量的心理健康狀態數據表現出了不同程度的數據處理能力。傳統跟蹤方法最終丟失的數據組數量最大,丟失數據組的數量在2~3 組之間。文獻[13]中的實時跟蹤方法最終丟失的數據組數量在1~2 組之間,丟失數據組數量較大。文獻[18]中的實時跟蹤方法最終丟失的數據組數量在0~1 組之間,丟失的狀態數據組數量較少,而文中設計的跟蹤方法只在處理實驗數據組3時產生了1 組數據丟失,與3 種現有實時跟蹤方法相比,其丟失的數據組最少。

表4 4種實時跟蹤方法丟失狀態數據結果
3 結束語
隨著心理測量技術的不斷發展,心理健康狀態實時跟蹤逐漸成為了技術研究的重點。文中以激光傳感器感知數據作為處理對象,構建了心理健康狀態實時跟蹤方法,該方法能夠改善現有實時跟蹤方法跟蹤成功率較低、跟蹤速度過小以及狀態數據丟失等缺點,能夠為今后研究心理健康狀態實時跟蹤提供一定的研究方向。
猜你喜歡
光明少年(2024年5期)2024-05-31 10:25:59
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當代陜西(2022年4期)2022-04-19 12:08:54
品牌研究(2022年9期)2022-04-06 02:41:56
品牌研究(2022年8期)2022-03-23 06:49:06
品牌研究(2022年6期)2022-03-23 05:25:50
品牌研究(2022年1期)2022-03-18 02:01:10
娃娃畫報(2019年11期)2019-12-20 08:39:45
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52