基于旋轉(zhuǎn)脈沖注入定位的無(wú)位置傳感器BLDCM 控制系統(tǒng)
2022-06-29 06:08:42李克靖王賢會(huì)
電子設(shè)計(jì)工程 2022年12期
李克靖,萬(wàn) 清,宋 錦,王賢會(huì)
(中科芯集成電路有限公司,江蘇無(wú)錫 214072)
無(wú)刷直流電機(jī)BLDCM(Brushless DC Motor)作為一種利用電子換相的新型電機(jī)[1],具有良好的調(diào)速性能,且運(yùn)行效率高,結(jié)構(gòu)簡(jiǎn)單,易于維護(hù),在家用電器、汽車(chē)電子、精密機(jī)械、機(jī)器人等領(lǐng)域有著廣泛應(yīng)用[2-3]。然而,傳統(tǒng)的BLDCM 控制采用霍爾傳感器、編碼器等器件作為位置傳感器來(lái)檢測(cè)電機(jī)轉(zhuǎn)子位置[4-5],增加了電機(jī)成本和結(jié)構(gòu)復(fù)雜性的同時(shí)還引入了潛在的故障因素,且在水泵、壓縮機(jī)等工作在浸沒(méi)條件下的工況中,會(huì)降低系統(tǒng)的可靠性[6]。因此,BLDCM 的無(wú)位置傳感器控制成為熱門(mén)的研究方向之一。
反電動(dòng)勢(shì)過(guò)零點(diǎn)檢測(cè)法是目前最常用的無(wú)位置傳感器控制方法[7],但是,在電機(jī)靜止起動(dòng)或低速運(yùn)行時(shí),反電動(dòng)勢(shì)的檢測(cè)會(huì)存在很大的誤差和干擾,因此需要采取專(zhuān)用的啟動(dòng)和加送方式[8]。三段式啟動(dòng)法采用預(yù)定位的方式,通過(guò)導(dǎo)通任意兩相,并控制電流大小與導(dǎo)通時(shí)間,使轉(zhuǎn)子轉(zhuǎn)到該導(dǎo)通狀態(tài)對(duì)應(yīng)的位置完成轉(zhuǎn)子的定位,該方法實(shí)現(xiàn)簡(jiǎn)單,但是受負(fù)載變化的影響較大,同時(shí)還容易出現(xiàn)電機(jī)小幅度倒轉(zhuǎn)的現(xiàn)象[9];升頻升壓法通過(guò)調(diào)節(jié)繞組導(dǎo)通的脈沖寬度來(lái)控制加載繞組上的電壓,在一定升頻速度內(nèi)可實(shí)現(xiàn)不同負(fù)載下的可靠啟動(dòng),但是需要輔以特殊的硬件電路,降低了系統(tǒng)整體的可靠性[10]。文獻(xiàn)[11]采用基于電感法的啟動(dòng)方法,通過(guò)施加6 個(gè)短時(shí)脈沖,然后比較響應(yīng)電流峰值來(lái)確定轉(zhuǎn)子的位置,該方法有效提高了轉(zhuǎn)子位置檢測(cè)的準(zhǔn)確性,然而采樣電流的同時(shí)還需記錄電流超過(guò)閾值的抬升時(shí)間,增加了比較方式的復(fù)雜度。該系統(tǒng)采用一種改進(jìn)型旋轉(zhuǎn)脈沖注入法,比較方式簡(jiǎn)化的同時(shí)保證了轉(zhuǎn)子定位的準(zhǔn)確性,在多款電機(jī)上進(jìn)行驗(yàn)證,運(yùn)行效果良好,可滿足大部分場(chǎng)合的應(yīng)用。
1 系統(tǒng)工作原理
1.1 反電動(dòng)勢(shì)過(guò)零點(diǎn)檢測(cè)
無(wú)刷直流電機(jī)控制中常采用較低成本的霍爾位置傳感器來(lái)檢測(cè)換相點(diǎn),將3 個(gè)霍爾位置傳感器間隔120°電角度進(jìn)行安裝,3 個(gè)霍爾位置傳感器(A、B、C)的輸出信號(hào)將360°電角度分為6 個(gè)扇區(qū),如圖1 所示,實(shí)線為霍爾信號(hào)電平變化曲線,虛線為三相反電動(dòng)勢(shì)波形,可以看出兩個(gè)換相點(diǎn)中間都對(duì)應(yīng)一相反電動(dòng)勢(shì)的極性變化的點(diǎn),稱(chēng)為過(guò)零點(diǎn)[12-13]。利用這一特性,只需準(zhǔn)確檢測(cè)出三相反電動(dòng)勢(shì)過(guò)零點(diǎn),再加上30°電角度延遲即為下一換相時(shí)刻。

圖1 霍爾扇區(qū)和三相反電動(dòng)勢(shì)示意圖
由于無(wú)刷直流電機(jī)的方波驅(qū)動(dòng)過(guò)程中總有一相功率管為懸空狀態(tài),導(dǎo)通相進(jìn)行PWM 調(diào)制時(shí),在兩相導(dǎo)通狀態(tài)下觸發(fā)ADC 采樣懸空相電壓即可認(rèn)為是該相的反電動(dòng)勢(shì),與母線電壓的一半進(jìn)行比較就可以得到過(guò)零點(diǎn)信號(hào)。
1.2 電感檢測(cè)法原理
無(wú)刷直流電機(jī)的氣隙磁場(chǎng)由轉(zhuǎn)子永磁體與定子電樞的合成磁勢(shì)產(chǎn)生,電機(jī)磁場(chǎng)的飽和程度取決于兩者的相對(duì)位置,磁場(chǎng)越飽和,定子繞組電感越小。所以,當(dāng)轉(zhuǎn)子永磁體處于不同位置時(shí),定子繞組等效電感是不同的。轉(zhuǎn)子磁勢(shì)和定子電樞磁勢(shì)的關(guān)系可以分為增磁和去磁兩種典型模式,當(dāng)轉(zhuǎn)子永磁磁動(dòng)勢(shì)軸線與電樞磁動(dòng)勢(shì)軸線夾角小于90°時(shí),為增磁效應(yīng),鐵芯磁阻增大,繞組電感減小;當(dāng)夾角大于90°時(shí),為去磁效應(yīng),鐵芯磁阻減小,繞組電感增大。繞組電感與轉(zhuǎn)子位置變化規(guī)律如圖2 所示,d軸為轉(zhuǎn)子永磁體N 極軸線方向,該方向繞組電感最小;在±q軸方向繞組電感最大。
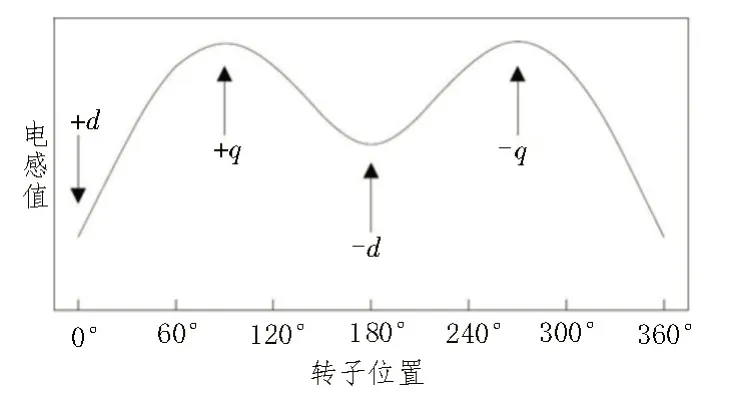
圖2 繞組電感與轉(zhuǎn)子位置關(guān)系圖
如圖3 所示,當(dāng)對(duì)定子繞組施加短時(shí)脈寬電壓時(shí),不同電感值對(duì)應(yīng)不同的直流母線電流峰值:電感值越小,對(duì)應(yīng)的電流峰值越大;電感值越大,則對(duì)應(yīng)的電流峰值越小。因此,可以通過(guò)比較不同位置檢測(cè)到的直流母線電流峰值,間接估算出電機(jī)轉(zhuǎn)子所在位置。
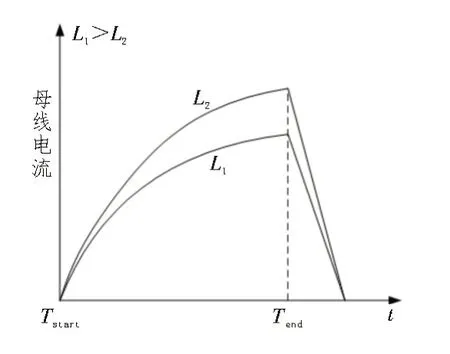
圖3 繞組脈沖響應(yīng)電流特性
1.3 旋轉(zhuǎn)脈沖注入法初始位置檢測(cè)
為了保證脈沖電壓矢量能夠唯一確定轉(zhuǎn)子位置區(qū)間,系統(tǒng)選擇以三三導(dǎo)通組成的6 個(gè)電壓矢量Vxyz作為注入脈沖電壓矢量[14],如圖4 所示,其中,x、y、z分別對(duì)應(yīng)A、B、C 三相的開(kāi)關(guān)狀態(tài),值為1 代表對(duì)應(yīng)相的上橋臂開(kāi)通,下橋臂關(guān)斷;值為0 則代表對(duì)應(yīng)相的下橋臂開(kāi)通,上橋臂關(guān)斷。
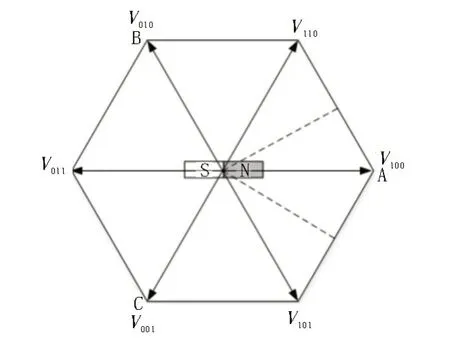
圖4 電壓矢量分布及轉(zhuǎn)子位置示意圖
具體實(shí)現(xiàn)定位時(shí),將電壓矢量按V100→V110→V010→V011→V001→V101的順序注入電機(jī)三相繞組,在電壓矢量作用結(jié)束時(shí)刻分別采樣對(duì)應(yīng)直流母線電流I100、I110、I010、I011、I001、I101,這里需要注意,由于繞組電感的存在,每個(gè)電壓矢量作用結(jié)束后,都需要等待一段時(shí)間使續(xù)流完成后再注入下一個(gè)電壓矢量。通過(guò)繞組電感與轉(zhuǎn)子位置關(guān)系圖并經(jīng)過(guò)大量實(shí)驗(yàn)發(fā)現(xiàn),處于轉(zhuǎn)子兩極的定子繞組電感差最大。因此,將電角度相差180°的三對(duì)電流的差值|I100-I011|、|I110-I001|和|I010-I101|進(jìn)行比較,得到相差最大的方向,假設(shè)I100和I011相差最大,且I100>I011,則可確定轉(zhuǎn)子處于V100所在扇區(qū)(如圖4 虛線間扇區(qū)),其他情況以此類(lèi)推。
2 系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)主控芯片型號(hào)STM32F031C6T6,該芯片基于Cortex-M0 內(nèi)核,有48 個(gè)引腳,時(shí)鐘頻率最高為48 MHz,同時(shí)帶有多個(gè)ADC 采樣通道和定時(shí)器[15-16],滿足電機(jī)控制所需外設(shè)資源。系統(tǒng)硬件電路總體結(jié)構(gòu)如圖5 所示,主要由主控芯片、逆變驅(qū)動(dòng)電路、反電動(dòng)勢(shì)檢測(cè)電路以及電流電壓檢測(cè)保護(hù)電路組成。
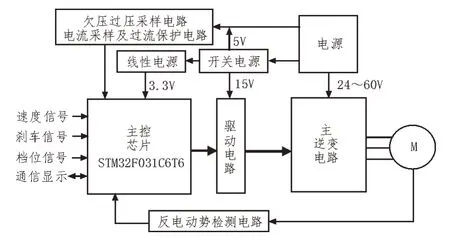
圖5 系統(tǒng)硬件電路總體結(jié)構(gòu)框圖
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件設(shè)計(jì)流程如圖6 所示。主程序完成芯片時(shí)鐘、ADC、定時(shí)器等相關(guān)外設(shè)的初始化、硬件電路自檢、狀態(tài)機(jī)更新、故障和功能處理;中斷函數(shù)實(shí)現(xiàn)對(duì)電機(jī)的驅(qū)動(dòng)控制,包括反電動(dòng)勢(shì)采樣、過(guò)零點(diǎn)檢測(cè)、延時(shí)換相及PWM 信號(hào)更新輸出等。
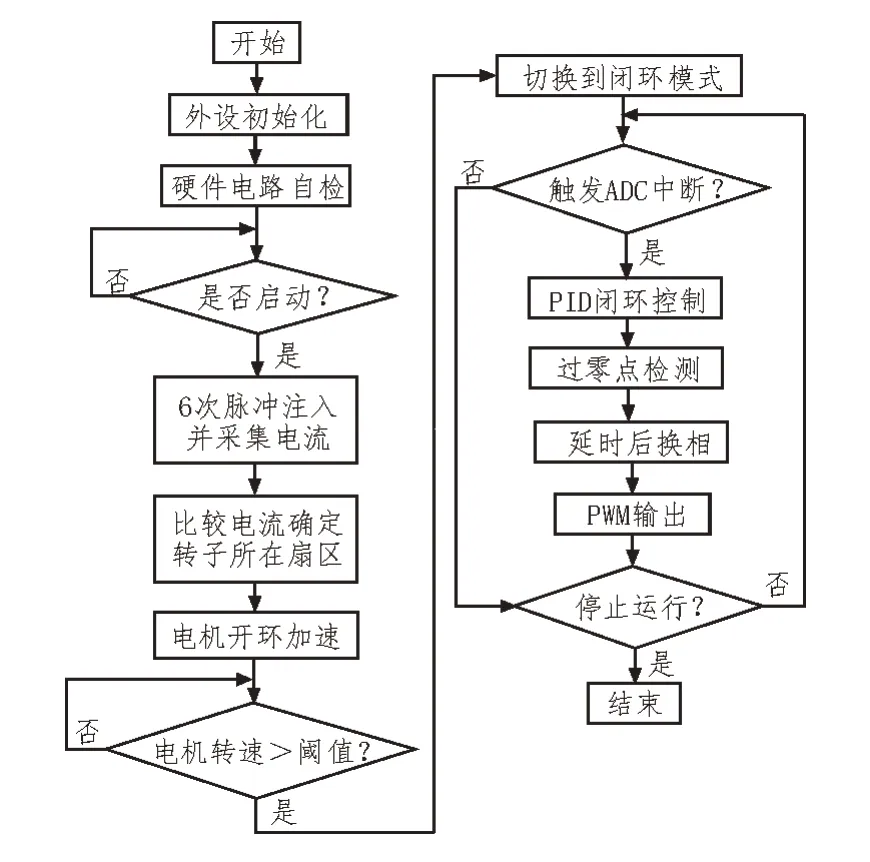
圖6 系統(tǒng)軟件設(shè)計(jì)流程
ADC 中斷程序檢測(cè)三相反電動(dòng)勢(shì)過(guò)零點(diǎn)時(shí)刻,并通過(guò)TIM3 計(jì)數(shù)器獲取相鄰兩次換相點(diǎn)的時(shí)間差,作30°電角度延時(shí),完成電機(jī)換相,同時(shí)根據(jù)扇區(qū)更新計(jì)數(shù)反饋電機(jī)運(yùn)行速度,完成速度PID 閉環(huán)調(diào)節(jié)。
4 實(shí)驗(yàn)結(jié)果及分析
為測(cè)試該系統(tǒng)控制效果對(duì)不同電機(jī)的適應(yīng)性,在多款型號(hào)電機(jī)上進(jìn)行了測(cè)試,控制系統(tǒng)測(cè)試平臺(tái)如圖7 所示,其包括電動(dòng)自行車(chē)用輪轂電機(jī)、電動(dòng)三輪車(chē)用中置電機(jī)以及小功率的光伏水泵電機(jī)。大量測(cè)試顯示,該系統(tǒng)可以很好地適配上述電機(jī),啟動(dòng)平穩(wěn),輸出轉(zhuǎn)矩穩(wěn)定,且具有良好的調(diào)速性能。

圖7 控制系統(tǒng)測(cè)試平臺(tái)
圖8 為該系統(tǒng)在輪轂電機(jī)上運(yùn)行時(shí)的三相電壓和電機(jī)霍爾信號(hào)變化波形,可以看出三相電壓波形形態(tài)規(guī)則,換相時(shí)刻也能保持平穩(wěn);同時(shí)換相點(diǎn)與霍爾信號(hào)變化保持一致,說(shuō)明換相位置準(zhǔn)確。
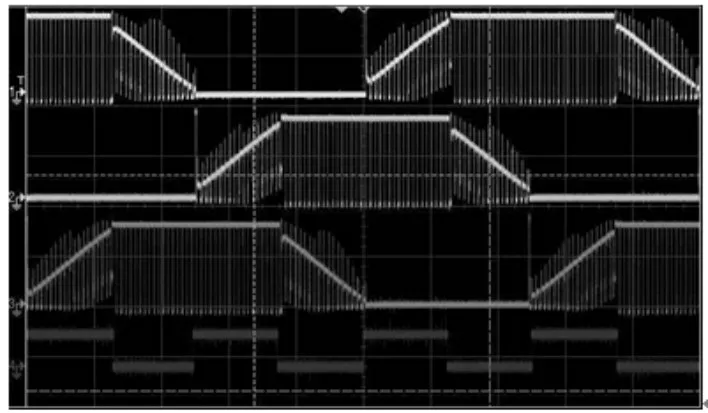
圖8 三相電壓及霍爾變化波形圖
測(cè)試還對(duì)該系統(tǒng)和采用預(yù)定位方法的啟動(dòng)速度曲線進(jìn)行了對(duì)比。圖9(a)為采用預(yù)定位法的啟動(dòng)速度曲線,圖9(b)為該系統(tǒng)啟動(dòng)速度曲線。采用預(yù)定位法時(shí),由于電機(jī)出現(xiàn)小幅度的倒轉(zhuǎn),會(huì)出現(xiàn)啟動(dòng)加速時(shí)來(lái)回抖動(dòng)的現(xiàn)象;而該系統(tǒng)采用旋轉(zhuǎn)脈沖注入方式能夠準(zhǔn)確地檢測(cè)轉(zhuǎn)子初始位置,靜止啟動(dòng)時(shí)避免了電機(jī)倒轉(zhuǎn)和抖動(dòng)的產(chǎn)生。

圖9 電機(jī)啟動(dòng)速度曲線對(duì)比
輪轂電機(jī)進(jìn)行測(cè)試時(shí),采用專(zhuān)業(yè)的電機(jī)測(cè)功系統(tǒng),得到的系統(tǒng)測(cè)功曲線如圖10 所示,由圖可見(jiàn)該系統(tǒng)限流穩(wěn)定,且電機(jī)在低速大轉(zhuǎn)矩下依然能夠保持平穩(wěn)運(yùn)行,在48 V 穩(wěn)壓電源供電時(shí),最大轉(zhuǎn)矩達(dá)到70 N·m,與市場(chǎng)上功率相同的有霍爾電動(dòng)車(chē)控制器的最大轉(zhuǎn)矩水平相當(dāng)。
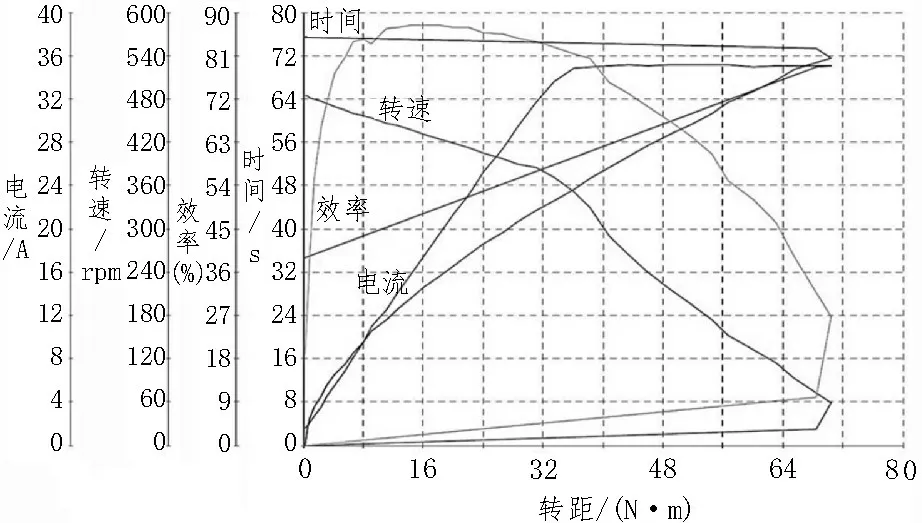
圖10 系統(tǒng)測(cè)功曲線圖
5 結(jié)束語(yǔ)
該文設(shè)計(jì)了一種基于旋轉(zhuǎn)脈沖注入的無(wú)位置傳感器無(wú)刷直流電機(jī)控制系統(tǒng),與傳統(tǒng)的三段式啟動(dòng)控制方式相比,該系統(tǒng)具有更好的啟動(dòng)性能和更高的可靠性,同時(shí)輸出轉(zhuǎn)矩平穩(wěn),換相位置準(zhǔn)確,且對(duì)不同電機(jī)具有較好的適應(yīng)性,現(xiàn)已成功應(yīng)用于電動(dòng)自行車(chē)控制器修復(fù),作為輔助功能,在電機(jī)霍爾傳感器出現(xiàn)故障時(shí)驅(qū)動(dòng)電機(jī)安全運(yùn)行。另外,在水泵電機(jī)、園林工具、電動(dòng)工具等領(lǐng)域也具有較高的應(yīng)用價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
- 電子設(shè)計(jì)工程的其它文章
- 基于CPNN 的電力SDN 通信網(wǎng)絡(luò)抗毀性評(píng)估系統(tǒng)設(shè)計(jì)
- 基于大數(shù)據(jù)的網(wǎng)絡(luò)信息傳輸安全態(tài)勢(shì)感知算法
- 基于STM32 的電力通信數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
- 由X86 構(gòu)架到ARM 構(gòu)架的應(yīng)用移植流程平臺(tái)研究
- 基于高斯混合模型聚類(lèi)的低電壓用戶繳費(fèi)特征提取
- 基于BP 神經(jīng)網(wǎng)絡(luò)算法的短期電力負(fù)荷預(yù)測(cè)研究