新型互補序列設計及其在OFDM系統(tǒng)改進同步算法中的應用
2022-06-29 09:47:34張爍瑜高軍萍
河北工業(yè)大學學報 2022年3期
張爍瑜,高軍萍,李 琦,王 丹
(河北工業(yè)大學 電子信息工程學院,天津 300401)
0 引言
正交頻分復用(Orthogonal Frequency Division Multiplexing,OFDM)系統(tǒng)雖具有抗干擾能力強、頻譜利用率高的特點[1-4],但其對時間和頻率偏移十分敏感[5-7]。在基于訓練序列的同步算法中,最為經(jīng)典的Schmidl 算法[8]由2 組相同序列構(gòu)成,但該算法因循環(huán)前綴(Cyclic Prefix,CP)的影響而存在一段“平坦區(qū)”。Minn算法[9]將訓練序列分為4部分,盡管該算法解決了“平坦區(qū)”的問題,但在定時估計曲線中存在一系列副峰,這會影響OFDM 系統(tǒng)的精確同步。Park[10]利用共軛對稱結(jié)構(gòu)提出一種新的算法,該算法的定時估計曲線在正確同步點有一個尖銳的峰值,同步較為準確,但副峰的存在仍可能會影響系統(tǒng)的正確同步。Schmidl、Minn和Park算法的訓練序列均采用相關性較差的PN序列,而互補序列因具有良好的相關特性引起學者們的關注[11]。相比較于MPSK Golay 互補序列而言,MQAM 序列因其優(yōu)良特性被更廣泛應用于OFDM 系統(tǒng)中。Chong 和Tarokh[12]基于4QAM 序列,提出2 種16QAM Golay 互補序列的構(gòu)造方法。2015 年,Zeng等[13]提出一種可將二元Golay互補序列直接生成16QAM Golay互補序列的設計方法。然而,目前互補序列的設計仍存在方法較少,長度受限的問題。
為提高OFDM系統(tǒng)的定時精度,本文利用相關性良好的新型互補序列對同步算法進行改進。首先,設計出一種新型16QAM Golay互補序列,該序列因具有良好的相關特性可以有效地應用于OFDM系統(tǒng)中;然后,利用新型互補序列和恒包絡零自相關(Constant Amplitude Zero Auto Correlation,CAZAC)序列提出一種同步改進算法,該算法利用共軛對稱結(jié)構(gòu),采用2組序列對原有的滑動窗口進行改進,通過對設計的2組窗口同時進行相關運算,可很好的解決系統(tǒng)在低信噪比下對定時偏移尤為敏感的問題。仿真結(jié)果表明,改進算法在低信噪比下仍可實現(xiàn)精準同步,并且副峰對主峰的影響較小,能夠提高系統(tǒng)的定時精度。
1 新型Golay 互補序列的設計
由于OFDM 系統(tǒng)對定時偏移較為敏感,應用相關性良好的互補序列可以提高系統(tǒng)的定時精度。因此,本節(jié)提出一種新型16QAM Golay互補序列的設計方法,為互補序列在同步中的應用提供了更多的可選序列。
1.1 Golay 互補序列的定義
Golay[14]在1961年首次定義了Golay互補序列,通常采用自相關函數(shù)對其進行表征,定義如下:
定義1設序列u=(u0,u1,…,un-1),其非周期自相關函數(shù)為

則稱(u0,u1)為Golay互補序列對。
基于上述Golay互補序列對的思想,Tseng[15]提出Golay互補序列集,定義如下。
定義3若有m個長為n的序列(u0,u1,…,um-1)滿足:

則稱(u0,u1,…,um-1)構(gòu)成一組Golay互補序列集。
1.2 新型16QAM Golay 互補序列的構(gòu)造方法
首先,定義一組通過二元序列u0,u1得到十六元序列v0,v1,v2,v3的新型映射方法,如下:
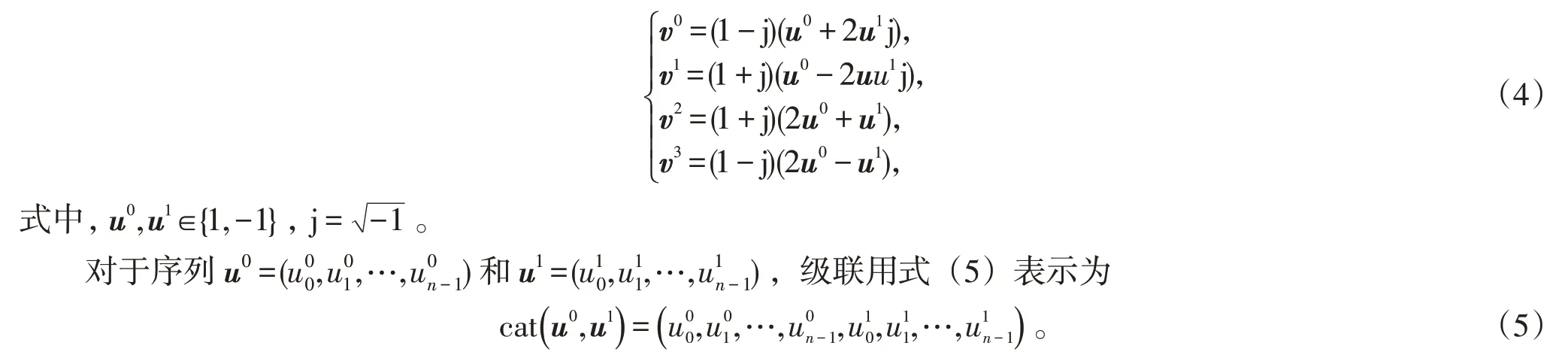
新型16QAM Golay互補序列構(gòu)造步驟如下:

步驟2利用式(4)所定義的新型映射關系,將序列(u0,u1)進行變換,可得到一組n長16QAM序列集(v0,v1,v2,v3)。
步驟3通過級聯(lián)將(v0,v1,v2,v3)擴展成長度為2n的序列集(w0,w1,w2,w3),如下:

定理1如果存在一組n長二元Golay互補序列(u0,u1),通過式(4)變換得到序列(v0,v1,v2,v3),則該組序列(v0,v1,v2,v3)為Golay互補序列。
證明:根據(jù)自相關函數(shù)定義,
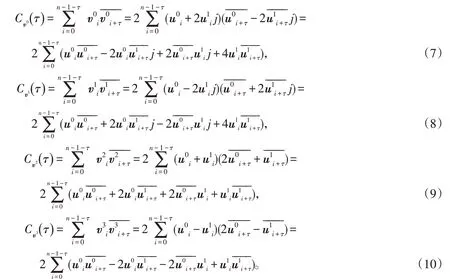
因此,

已知(u0,u1)為一組Golay互補序列,根據(jù)該序列自相關性質(zhì),可得

所以,

綜上,(v0,v1,v2,v3)為Golay互補序列。
定理2若有一組n長Golay 互補序列(v0,v1,v2,v3),則其通過式(6)的級聯(lián)方法所得到的序列(w0,w1,w2,w3)也為Golay互補序列。
證明:根據(jù)自相關函數(shù)定義,
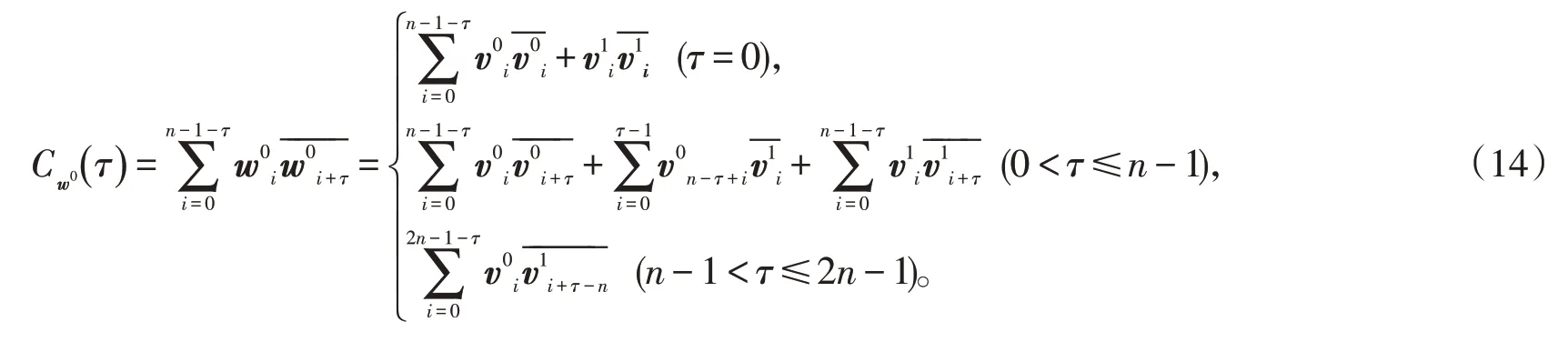
同理可得,
因此,
已證(v0,v1,v2,v3)為Golay互補序列,根據(jù)定義3可知:

因此,序列(w0,w1,w2,w3)為一組Golay互補序列。

證明:根據(jù)序列的自相關特性,

因此,推論成立。
表1對比了部分Golay互補序列的構(gòu)造方法。現(xiàn)有的一些構(gòu)造方法所設計的序列長度受限,僅能得到單一長度的序列,而本節(jié)提出的Golay 互補序列長度可根據(jù)初始序列長度和級聯(lián)次數(shù)的不同,靈活得到多種可選序列。例如:若想得到長為16 的Golay 互補序列,利用本節(jié)提出的設計方法,可通過選取初始序列長度分別為2、4、8 的序列,并對應級聯(lián)3、2、1 次的3種方法生成。另外,若想得到非2次冪長度的Golay互補序列,只需選取長度為非2次冪的初始序列并結(jié)合級聯(lián)就可生成。

表1 Golay 互補序列構(gòu)造方法對比Tab.1 Comparison of construction methods of Golay complementary sequences
1.3 構(gòu)造實例
選取長度為4 的二元Golay 互補序列對(u0,u1),如下:

由式(4),可構(gòu)造長為4的16QAM Golay互補序列(v0,v1,v2,v3):

利用推論中的方法,將(v0,v1,v2,v3)級聯(lián)2次后,可得到長為16的16QAM Golay互補序列

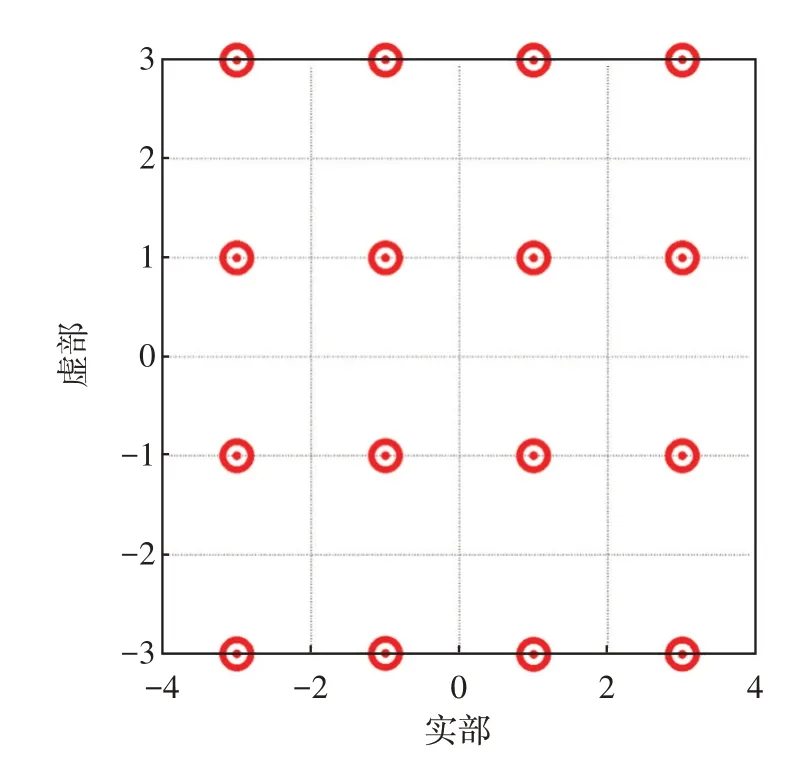
圖1 星座圖Fig.1 Constellation of sequence
2 新型互補序列在同步技術(shù)中的應用
由于OFDM 系統(tǒng)在低信噪比下對定時偏移更為敏感,本節(jié)通過對訓練序列結(jié)構(gòu)重新進行設計,利用新型16QAM Golay互補序列和CAZAC序列對滑動窗口進行改進,提出一種改進同步算法。
2.1 OFDM 系統(tǒng)同步原理
在含有N個子載波OFDM 系統(tǒng)中,信號采樣值為[19]
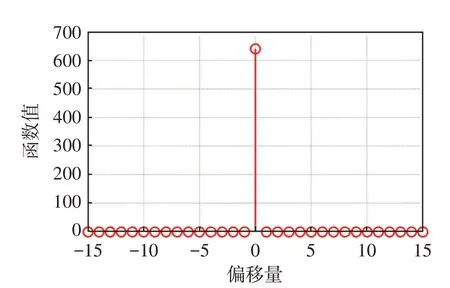
圖2 序列自相關特性Fig.2 Subsequence Autocorrelation Properties

式中:xn表示在第n個子載波上的傳輸信號;k為采樣點。
若信號在接收端完成精準采樣,則接收端的第k個采樣值為

式中:θ為符號定時偏移;Δfc為歸一化后的頻率偏移值;n(k)為第k個采樣值的加性高斯白噪聲(Additive White Gaussian Noise,AWGN);接收信號y(k)由式(28)表示:

式中:L表示信道容量;h(l)為第l個信道的脈沖響應。
基于訓練序列的同步算法的定時度量函數(shù)M(d)可由式(29)表示:

式中:P(d)表示滑動窗口的相關函數(shù);R(d)表示接收機在滑動窗口d采樣點時的能量。
2.2 基于新型互補序列和CAZAC 序列的改進同步算法
本節(jié)提出一種基于新型互補序列和CAZAC 序列的改進算法,該算法采用共軛對稱結(jié)構(gòu),將訓練序列分,4個部分:[A B*C D*]。其中,A是長度為N/4的互補序列,序列B為A的對稱序列,C是長度為N/4的CAZAC序列,序列D為C的對稱序列,符號“*”表示共軛運算,CP表示循環(huán)前綴,具體結(jié)構(gòu)可表示為:
基于2 組不同的序列,改進算法分別利用2 個不同的滑動窗口進行相關運算。滑動窗口1 設置為互補序列,窗口2 為CAZAC 序列,且兩窗口相距N/2。在該算法的窗口滑動過程中,只有當2個窗口同步點的相關值均為最大值時,所對應的才為正確同步點。為方便分析,將序列A,B*,C,D*分別表示為[a b],[b*a*],[c d],[d*c*],改進算法的滑動相關運算如圖4所示:
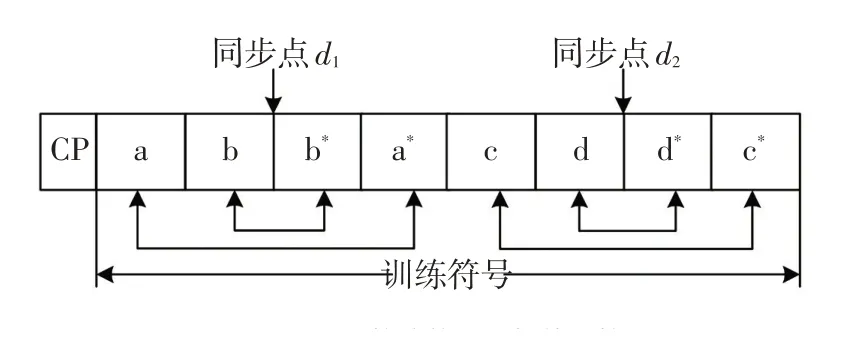
圖4 改進算法的滑動相關運算Fig.4 Sliding correlation operation of proposed algorithm
由于改進算法利用2 個窗口進行滑動相關,根據(jù)訓練序列的結(jié)構(gòu)特點,該算法將2 個滑動窗口的Pi(d)和Ri(d)分別表示為

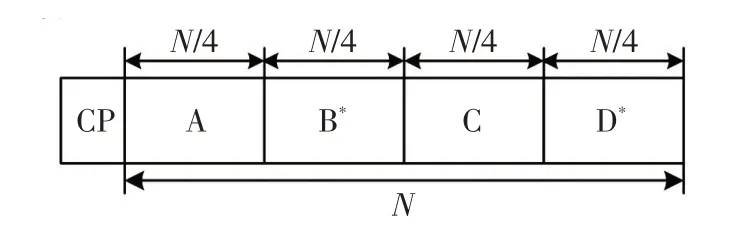
圖3 改進算法的訓練序列結(jié)構(gòu)Fig.3 Training sequence structure of proposed algorithm


改進算法的定時度量函數(shù)表示為

式中:Pi(d)表示第i個滑動窗口的相關函數(shù);Ri(d)表示接收機在第i個滑動窗口d采樣點時的能量。
根據(jù)式(34)可知,當2 個窗口的定時度量函數(shù)為非峰值(即Mi(d)≠1)時,根據(jù)乘法運算的性質(zhì),改進算法的定時度量值接近于0,只有當2個滑動窗口的定時度量函數(shù)同時達到最大值時,此時才得到該算法定時度量函數(shù)的峰值。
改進算法的同步點置于訓練符號起始位置N/4處,故定時同步點的估計值為

3 仿真結(jié)果分析
利用MATLAB 對OFDM 系統(tǒng)的幾種不同算法:Schmidl 算法、Minn 算法、Park 算法以及改進同步算法,在低信噪比(Signal to Noise Ratio,SNR)下的定時估計曲線和峰值比進行仿真分析。
3.1 低信噪比下的定時估計曲線分析
圖5 表示在CP=N/4,SNR=5 dB 條件下,4 種同步算法的定時估計曲線。圖5(a)中,Schmidl 算法由循環(huán)前綴引起的“平坦區(qū)”會導致該算法無法進行準確同步;Minn算法在正確同步點位置附近存在著幾乎與主峰等高的副峰,嚴重時,副峰值可能會超過在正確同步點處的主峰值,無法進行精準同步;在Park算法的定時估計曲線圖中,雖然主峰尖銳,但由于循環(huán)前綴的存在,該算法的定時估計曲線在正確同步點附近仍會存在多個副峰;而在圖5(b)改進算法的定時估計曲線中,幾乎無副峰,僅在正確同步點處存在一個十分尖銳的峰值。仿真結(jié)果表明,改進算法在低SNR的情況下,主峰完全不會受到副峰的干擾,能夠?qū)崿F(xiàn)精確同步。
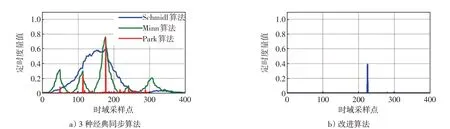
圖5 4 種同步算法定時估計曲線Fig.5 The Timing Estimation Curves of Four Synchronization Algorithms
3.2 峰值比分析
副峰對主峰的干擾通常是影響OFDM系統(tǒng)正確同步的最主要原因,為直觀描述這一特性,現(xiàn)將峰值比定義如下。
定義4將最高副峰幅值與主峰幅值之間的比值定義為峰值比,具體可用式(37)表示:

式中:P1表示最高副峰的幅值;Pm表示主峰的幅值。
圖6所示為4種不同的同步算法在AWGN信道,CP=N/8,不同SNR條件下仿真500次時的Pr。從圖中可發(fā)現(xiàn),Schmidl算法、Minn算法受訓練序列中的重復結(jié)構(gòu)以及循環(huán)前綴的影響,其Pr較高;而Park算法雖較前2種算法而言Pr有所降低,但仍明顯高于改進算法的Pr。根據(jù)式(37)可知,Pr越高,則說明最高副峰的幅值與主峰幅值之間差距越小,反之Pr越低,則說明最高副峰的幅值與主峰幅值相差越大。由此可見,改進算法的副峰對主峰的影響較小,有利于在OFDM系統(tǒng)中完成精準同步。
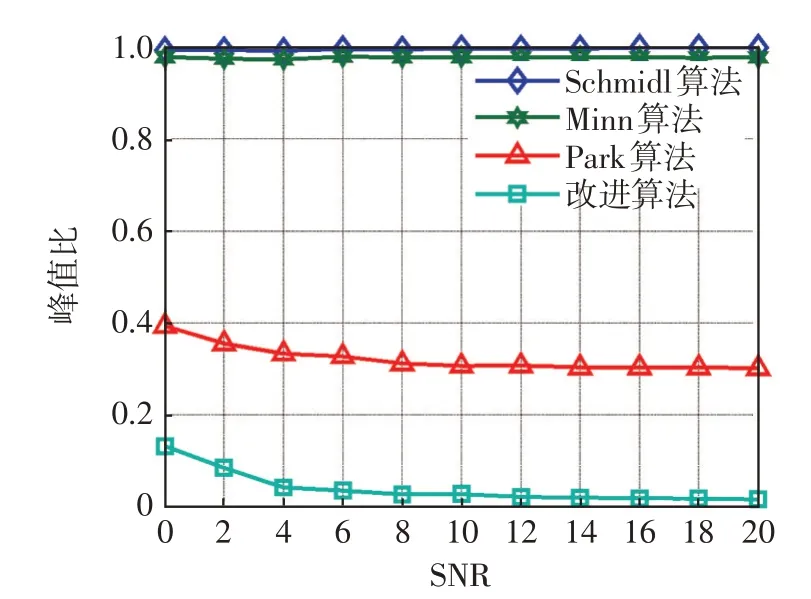
圖6 4 種同步算法的峰值比Fig.6 Peak ratio of four synchronization algorithms
4 結(jié)語
由于OFDM系統(tǒng)對定時偏移較為敏感,互補序列因具有良好的相關特性可應用于該系統(tǒng)中。同時,為解決系統(tǒng)在低信噪比下仍存在定時精度差的問題,還需對系統(tǒng)中的同步算法進行改進。為此,本文首先提出一種新型16QAM Golay互補序列的設計方法,然后利用新型互補序列和CAZAC序列提出一種改進同步算法。該算法通過對原有的滑動窗口進行改進,采用2組滑動窗口同時對2組不同的序列進行同步,以此解決系統(tǒng)在低信噪比下對定時偏移更為敏感的問題。仿真結(jié)果表明,改進算法較經(jīng)典同步算法而言,副峰對主峰的干擾較小,能夠提高系統(tǒng)的定時精度。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
海峽姐妹(2020年9期)2021-01-04 01:35:44
北京測繪(2020年12期)2020-12-29 01:33:58
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東青年(2016年1期)2016-02-28 14:25:25
當代修辭學(2014年3期)2014-01-21 02:30:44