提高干涉法反演橫向速度準確度研究
2022-07-01 08:01:58唐殿皓陳章友易先洲
雷達科學與技術 2022年3期
關鍵詞:信號
唐殿皓, 陳章友, 易先洲
(武漢大學電子信息學院, 湖北武漢 430072)
0 引言
海上目標的監(jiān)測是高頻地波雷達重要應用之一,傳統(tǒng)的監(jiān)測指標主要是目標的徑向速度和距離,除此之外,橫向速度同樣可以為運動目標的監(jiān)測提供重要的信息。若可以同時獲取目標的橫向速度和徑向速度,則可以合成目標的真實速度矢量,極大提高目標檢測跟蹤的準確度。
許多文章提出過提取橫向速度的方法。根據(jù)目標橫向運動時回波信號的時變特征,可以估計出目標的橫向速度。但要求其橫向速度較大,使得目標的徑向距離發(fā)生變化,若橫向速度較小,則無法得到橫向速度。根據(jù)移動物體上的不同反射點的回波信號的多普勒頻率的關系可以推算出橫向速度的大小,但此方法需要強的反射回波和準確的目標方位角使得該方法的使用有較大限制。雙基地雷達可以用來獲取海流的橫向和徑向運動分量,但若將其應用在目標橫向速度反演上,成本較高,便攜性差。更為新穎的方法還有利用GPS和神經(jīng)網(wǎng)絡算法來反演橫向速度,但其僅適合于車輛橫向速度的估計,無法應用于海上船只目標。
為實現(xiàn)海上目標橫向速度的測量,可以使用電波干涉法來進行橫向速度的提取,但傳統(tǒng)的處理過程是對各個通道回波信號解調和匹配濾波后直接進行干涉,無法很好地應對低信噪比信號的情況。文獻[1]提出使用廣義S變換來對噪聲進行抑制,但其提升目標回波信號信噪比的能力有限,無法很好地應用于實際情況。
為此,本文提出了一種適用于高頻地波雷達低信噪比信號橫向速度提取的方法。該方法首先將通道中的信號進行相干積累,提高回波信號信噪比,然后選取兩通道中積累后的目標信號相位相減得到相位差,最后通過多個積累后目標信號得到相位差變化率,進而反演橫向速度。仿真分析表明,該方法可以有效提高低信噪比信號反演出的橫向速度的準確度,并通過實測數(shù)據(jù)的處理驗證了該方法在實際應用當中的有效性。
1 橫向速度的提取原理
應用電波干涉法實現(xiàn)橫向速度提取的原理如圖1所示,雙通道的兩根接收天線相距為,以兩根接收天線位置為焦點可以分別畫出橢圓簇和雙曲線簇。當目標沿雙曲線運動時,目標到兩焦點的距離差-為一常數(shù)。由于同焦點的橢圓與雙曲線正交,目標沿橢圓的運動導致距離差-的變化最大。定義干涉體制下目標沿雙曲線運動為徑向運動,沿橢圓運動為橫向運動,則目標橫向速度與兩接收通道信號相位差變化率間關系為
(1)
式中, λ為波長,為目標兩天線中心位置距離,為目標方位角。
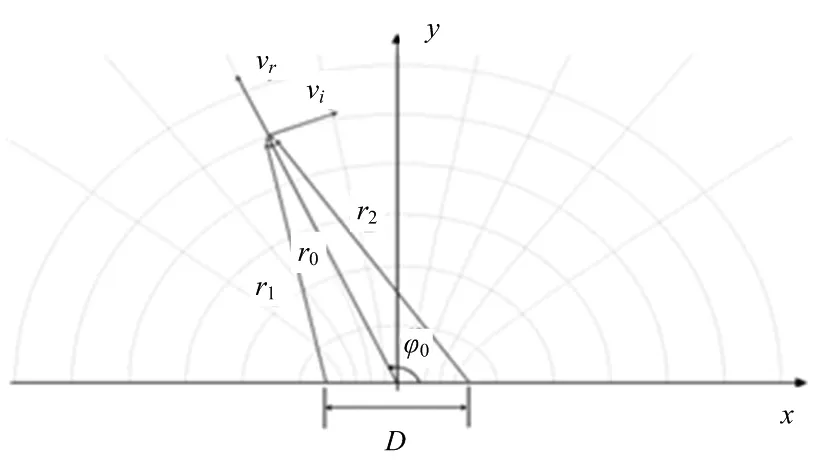
圖1 橫向速度測量原理圖
在實際應用中,目標到天線陣的距離由雷達可以得到,對雷達陣列信號作DOA估計則可以獲得方向角的大小。則可以由兩通道多幀目標回波信號相位相減形成的相位差序列得到。
2 信噪比對橫向速度提取的影響
實際工程中回波信號總是存在噪聲,這些噪聲會降低回波相位提取的準確度。下面對不同信噪比影響橫向速度提取準確度的程度進行仿真分析。仿真中設定橫向速度為5 m/s,目標距離為15 km,干涉天線距離為140 m,掃頻周期為0.125 s,載波頻率為7.5 MHz,掃頻帶寬為30 kHz。在不加噪聲時,對回波信號進行匹配濾波得到的信號幅度如圖2(a)所示,選取目標信號在不同通道中相位相減得到兩通道信號的相位差,由多幀信號得到相位差隨時間的變化如圖2(b)所示,此相位差時間變化率為0.007 3 rad/s,將其代入公式(1)中,可得到橫向速度為5 m/s。與設定的橫向速度完全一致,驗證了電波干涉法用于提取橫向速度的可行性。
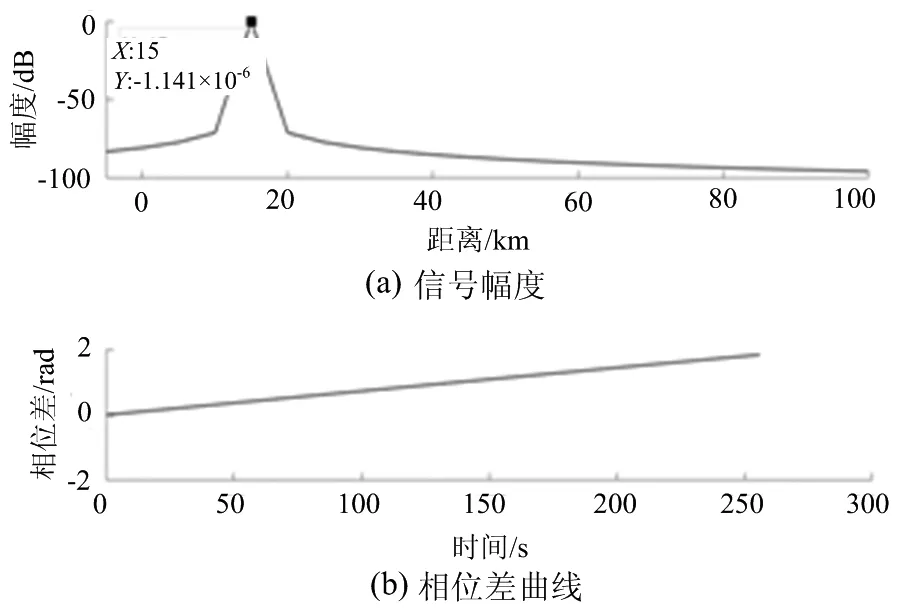
圖2 無噪聲信號仿真結果
下面逐漸降低信號信噪比,分別對原始回波信號信噪比分別是0 dB和-25 dB的情況進行仿真,對0 dB的回波信號進行匹配濾波得到的信號幅度如圖3(a)所示,由圖3(a)可以看出在15 km處仍可明顯看出目標信號,利用多幀信號得到的相位差隨時間的變化如圖3(b)所示,由此相位差曲線進行直線最小二乘擬合得到相位差隨時間變化率為0.007 2 rad/s,將其代入公式(1)中,得到橫向速度為4.95 m/s。保持信號信噪比為0 dB,其他仿真條件不變,做200次隨機實驗,計算反演出的橫向速度的RMSE(均方根誤差)僅為0.041 2 m/s,說明對于信噪比較高的回波信號,使用匹配濾波處理后的兩通道信號進行干涉,可以反演出較為準確的橫向速度。
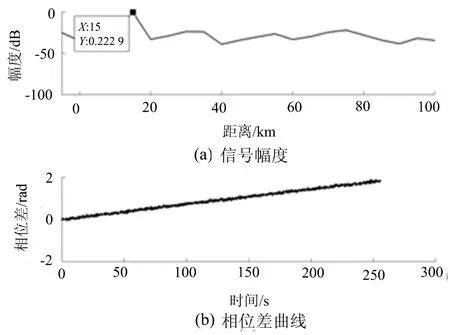
圖3 0 dB信號仿真結果
降低回波信號信噪比為-25 dB,處理后所得目標信號幅度如圖4(a)所示,從圖中可以看出,在15 km處已經(jīng)看不到目標信號,此時若進行干涉處理,得到相位差隨時間的變化如圖4(b)所示,可以看到相位差曲線的噪聲較大。利用該相位差曲線擬合得到相位差變化率為0.005 rad/s,將其代入式(1)得到橫向速度大小為3.38 m/s。保持信號信噪比為-25 dB,其他仿真條件不變,做200次隨機實驗,計算反演出的橫向速度的RMSE為1.20 m/s,與設定值偏差較大。在實際情況中,目標的原始回波信號往往會低于-25 dB,為能夠繼續(xù)應用干涉法提取目標橫向速度,需要在不影響通道間相位差的前提下,進一步提高目標信號的信噪比,從而減弱相位差曲線的噪聲,來提高反演橫向速度的準確度。
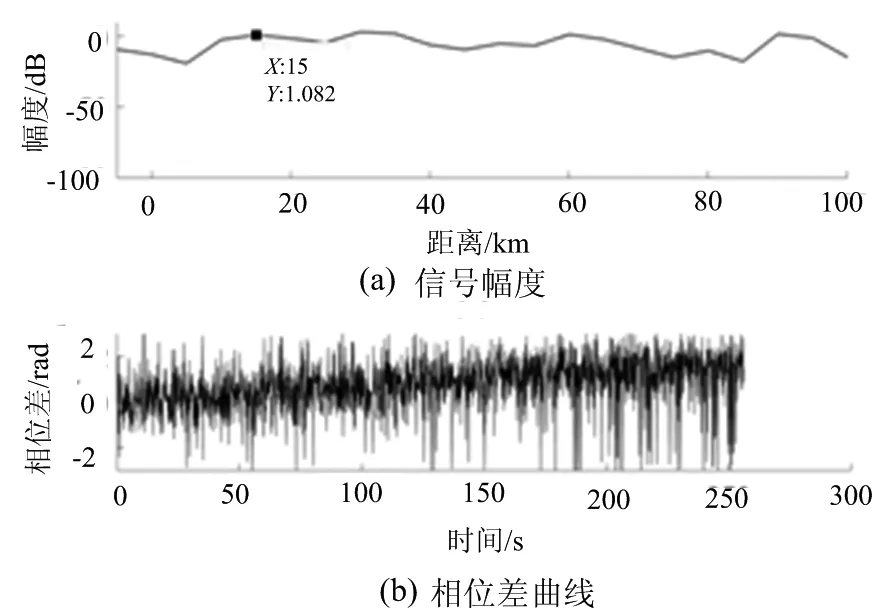
圖4 -25 dB信號仿真結果
3 相干積累后提取橫向速度
為使干涉模型可以用于反演實際的低信噪比目標信號的橫向速度,可以將多幀目標回波信號進行相干積累,使用積累后的目標回波信號進行干涉來反演橫向速度。下面從公式出發(fā)說明相干積累后反演橫向速度的基本原理。
設雷達的發(fā)射信號為線性調頻連續(xù)波,發(fā)射信號表達式如下:

(2)
式中,為幅度,為載波頻率,=為調頻的斜率,為信號的帶寬,為掃頻周期。天線1中回波信號如下:
(,)=exp{j2π[(-)+
(3)
式中,為回波信號幅度,為回波時延。經(jīng)解調和匹配濾波處理后,輸出信號為
(,)=1exp{[-2π(0+1)]}
(4)
同樣對于天線2中的輸出信號為
(,)=2exp{j[-2π(0+2)]}
(5)
式中,0,1,2是第幀掃頻周期目標到發(fā)射天線、接收天線1、接收天線2的距離。1,2為處理后的信號幅度。使用式(4)的相位減去式(5)的相位即可得到通道間的相位差:
(6)
此時相位差變化率的大小為
(7)
由第1節(jié)討論可知,橫向速度和徑向速度是互不影響的,故徑向距離的改變只依賴于徑向速度的大小而不受橫向速度的影響。由于目標這樣的運動特征,使得我們可以利用目標的徑向速度進行相干積累增強信號信噪比,同時由于橫向速度不受徑向速度的影響,所以不會破壞橫向速度帶來的相位變化,使得積累后兩天線中信號相位相減后仍可以得到正確的相位差曲線。
對天線1中的數(shù)據(jù),若選取初始的掃頻周期距離為,則后續(xù)的掃頻周期時間對應的目標徑向距離1為
1=+
(8)
對于目標到天線2和發(fā)射天線的徑向距離,同理可有
2=+
(9)
0=+
(10)
將式(8),(9),(10)分別代入式(4),(5)中,可得
(,)=1exp{j[-2π(++
2)]}
(11)
(,)=2exp{j[-2π(++
2)]}
(12)
分別選取幀掃頻周期中式(11),(12)對應的譜點,各自形成點序列,將序列視為-2到2時間上的連續(xù)信號,對其作傅里葉變換即進行相干積累,得到積累后的目標信號,為
=1exp{j[-2π(+)]}
(13)
=2exp{j[-2π(+)]}
(14)
是經(jīng)過幀信號積累后的增益,而噪聲由于并不具備相干性,無法因為積累而提高幅度,因此可以有效提高目標信號信噪比。同時可以看到在提高信噪比的同時,并未影響回波信號的相位,故使用式(13)相位減去式(14)相位可以獲得相位差。
每間隔幀掃頻周期,重復上述操作,即可得相位差序列,,2,…… 此時相位差變化率大小為

(15)
為驗證上述推導的正確性,取相干積累的掃頻周期數(shù)為100幀。相干積累后的信號幅度如圖5(a)所示,選取兩通道中多個積累后的目標信號的相位相減得到相位差隨時間的變化如圖5(b)所示,此相位差隨時間變化率同樣為0.007 3 rad/s,與不加噪聲的匹配濾波后的結果相同,所以同樣可以得到設定的5 m/s的橫向速度,說明了相干積累用于反演橫向速度的可行性。
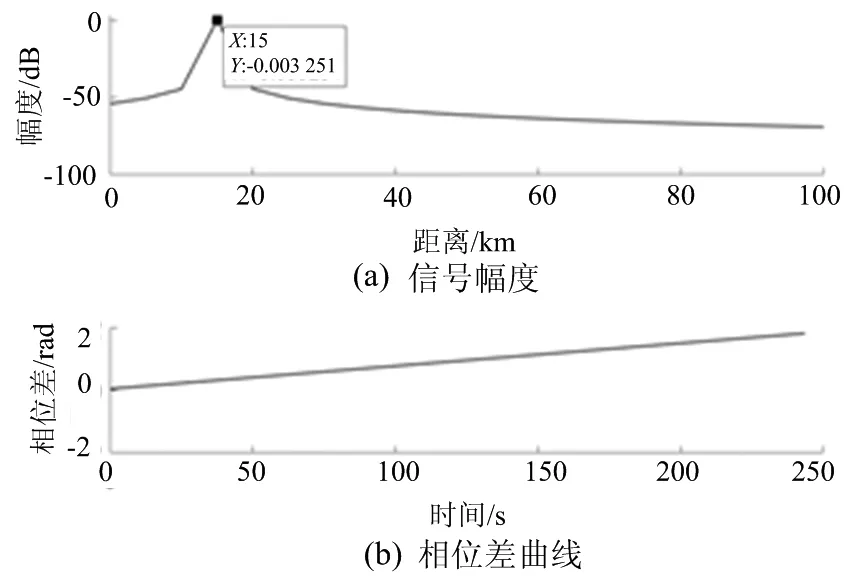
圖5 無噪聲信號100幀相干積累仿真結果
為驗證相干積累提升信號的信噪比后,可以提高低信噪比信號的橫向速度反演的準確度,我們設定原始回波信號信噪比分別為-25 dB和-35 dB,對其進行相干積累處理。首先設定信號信噪比為-25 dB,相干積累幀數(shù)為100幀,得到積累后的信號幅度和相位差曲線如圖6所示,從圖6(a)可以看到,相較于圖4(a)的目標信號,積累后的目標信號信噪比有明顯提升。使用每個通道中的積累后的目標信號進行干涉,得到的相位差曲線如圖6(b)所示,對該相位差曲線進行直線最小二乘擬合,得到相位差變化率為0.007 2 rad/s,代入式(1)計算得到橫向速度為4.95 m/s。保持仿真條件不變,進行200次隨機實驗,得到反演出的橫向速度的RMSE僅為0.16 m/s,遠小于未進行相干積累時的1.20 m/s,由此可見相干積累提高目標回波信號信噪比后,反演出的橫向速度比匹配濾波后直接干涉得到的橫向速度具有更高的準確度。
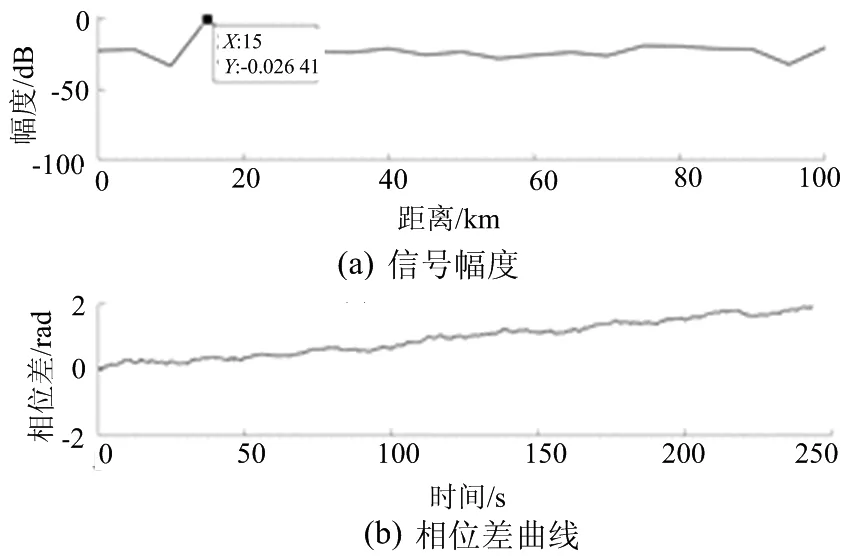
圖6 -25 dB信號100幀相干積累仿真結果
接下來將信號信噪比降低為-35 dB,相干積累幀數(shù)仍為100幀,得到圖7所示的信號幅度和相位差曲線,從圖中可以看出由于原始回波信號信噪比較低,積累后的目標回波信號信噪比也相應降低,致使得到的相位差曲線的噪聲較大。通過直線最小二乘擬合得到的相位差變化率為0.007 8 rad/s,將其代入式(1)計算橫向速度為5.3 m/s。在此仿真條件下進行200次隨機實驗,得到反演出的橫向速度的RMSE為0.63 m/s。

圖7 -35 dB信號100幀相干積累仿真結果
為進一步減小反演出橫向速度的RMSE,將相干積累的幀數(shù)提高到500幀,進行相干積累,得到如圖8所示的目標信號幅度和相位差曲線,從圖中可以看到在增加積累窗長后,目標信號信噪比進一步提升。相對于100幀信號相干積累后的相位差曲線,此時的相位差曲線變得更為平滑,由該曲線擬合得到的相位差變化率為0.007 1 rad/s,代入式(1)中計算得到橫向速度大小為4.8 m/s。保持仿真條件不變,進行200次隨機實驗,得到反演出的橫向速度的RMSE為0.51 m/s, 相對于100幀相干積累時反演出的橫向速度的RMSE減小了0.1 m/s,進一步提高了橫向速度反演的準確度。值得注意的是由于總的數(shù)據(jù)點數(shù)一定,在提高了積累窗長后,會使得積累后的信號數(shù)據(jù)點數(shù)變少,從而降低擬合的準確度,若想保證較大的積累窗長,需要保證較大的采樣頻率,使得在觀測時間內能夠采集到足夠多的數(shù)據(jù)點。
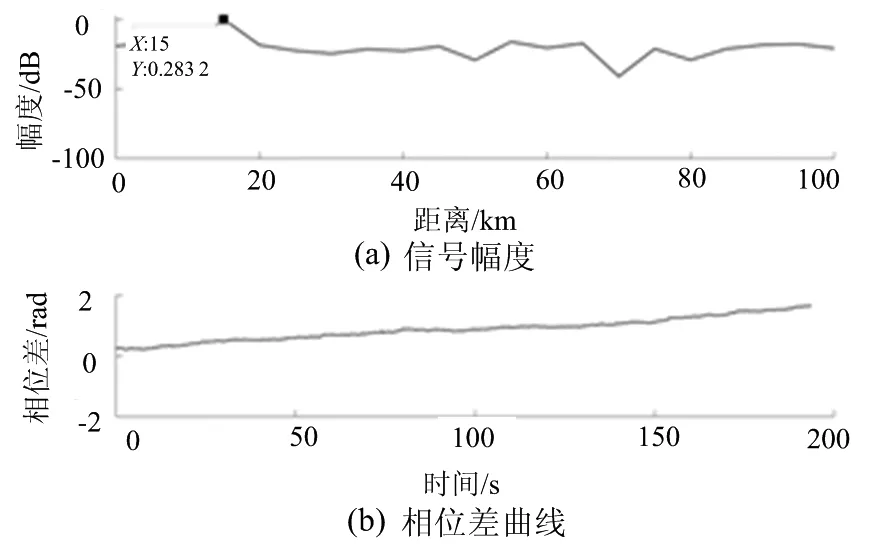
圖8 -35 dB信號500幀相干積累仿真結果
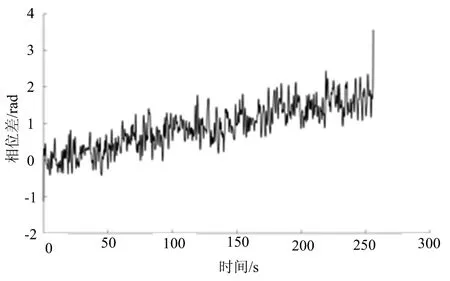
圖9 S變換處理后的相位差曲線
最后給出-25 dB信噪比的信號經(jīng)S變換處理后得到的相位差曲線如圖9所示,可以看到相對于圖6(b)相干積累后的相位差曲線,S變換處理后得到的相位差曲線的噪聲仍是比較大的,不利于斜率的提取。從這里可以看出相較于其他抑制噪聲的方法,相干積累不僅操作簡單,同時由于充分利用了目標橫向速度和徑向速度互不影響的運動特征,其效果是優(yōu)于其他方法的。
4 實測數(shù)據(jù)分析
為檢驗相干積累用于反演實際目標橫向速度的效果,對真實雷達數(shù)據(jù)進行處理分析。雷達數(shù)據(jù)來源于武漢大學研制的高頻地波雷達,時間地點為2015年1月17日龍海雷達站,該雷達站有6根接收天線是間距18 m的均勻線陣,工作頻率為7.8 MHz,掃頻周期為0.25 s,掃頻帶寬為30 kHz。
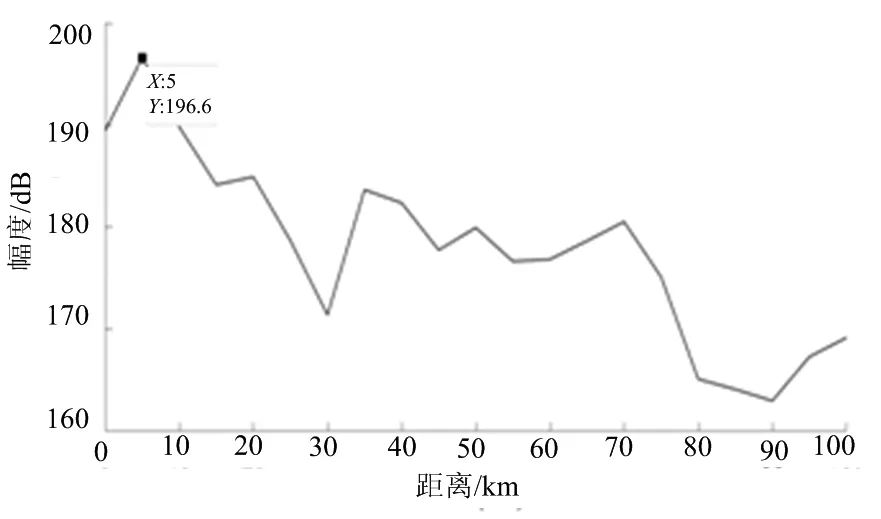
圖10 1月17日目標積累后信號幅度

圖11 1月17日目標對應的相位差曲線
在距離雷達站5 km處探測到一船只目標,其位置位于天線陣列法向方向上,用于干涉的兩根天線間距為90 m,相干積累的窗長為500幀掃頻周期。進行相干積累后目標回波信號的幅度如圖10所示,選取兩通道目標信號的相位進行相減得到相位差,由多個窗中的信號干涉得到相位差隨時間的變化如圖11所示,對該相位差曲線進行直線最小二乘擬合得到相位差變化率大小為0.009 8 rad/s,將其代入公式(1)中計算其橫向速度大小為3.32 m/s,由AIS數(shù)據(jù)計算其橫向速度大小為3.3 m/s,兩者僅相差0.02 m/s。
另一實測數(shù)據(jù)同樣來自于武漢大學研制的高頻地波雷達,其時間地點為2019年10月23日龍海雷達站,該雷達同樣有6根接收天線是間距18 m的均勻線陣,兩發(fā)八收,其中我們關注的工作頻率為7.5 MHz,掃頻周期為0.125 s,掃頻帶寬為30 kHz。
在與雷達站相距5 km處,探測到一船只目標,目標與雷達站的連線和天線陣列夾角為100°,用于干涉的兩根天線間距為90 m,相干積累的窗長仍選取500幀掃頻周期。相干積累后的回波信號幅度如圖12所示,選取的兩通道中積累后的目標信號進行干涉,得到相位差曲線如圖13所示,對該曲線進行直線最小二乘擬合,得到相位差變化率大小為0.008 7 rad/s,將其代入式(1)中,計算得到橫向速度為3.8 m/s,由AIS提供的數(shù)據(jù)計算得到橫向速度大小為3.62 m/s,兩者相差僅為0.18 m/s。由上述兩個反演橫向速度的實例可以看出,相干積累用于提取目標橫向速度是可行的。
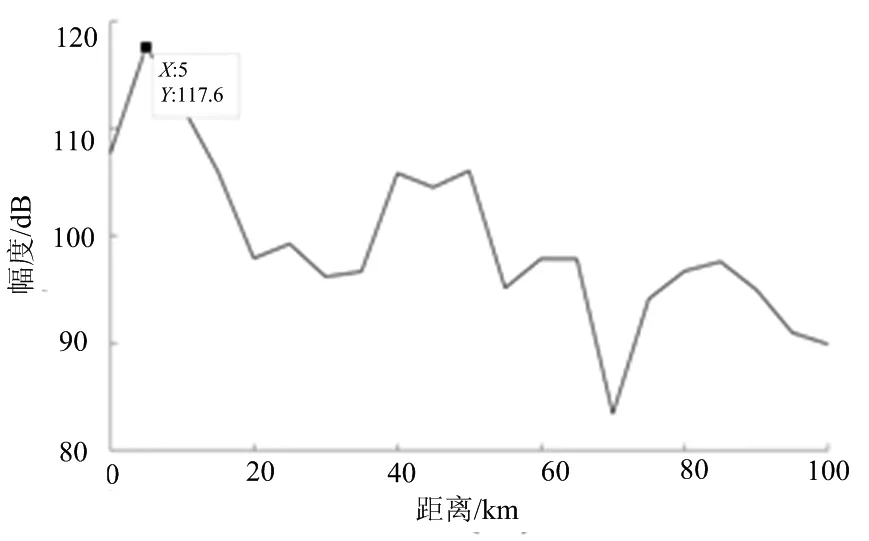
圖12 10月23日目標積累后信號幅度
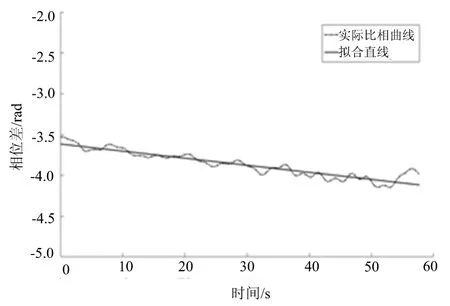
圖13 10月23日目標對應的相位差曲線
5 局限性分析
在上面的討論中,已經(jīng)證實了相干積累用于提取橫向速度的有效性,但都是基于橫向速度和徑向速度不變的前提條件下進行分析。但當目標移動距離很大時,盡管目標是勻速直線運動,在上述分析的曲線坐標系中,目標的橫向速度和徑向速度都會發(fā)生改變,使得提取的結果發(fā)生錯誤。為此,有必要找出目標橫向速度和徑向速度保持不變的橫向距離移動范圍,以此來控制不同橫向速度目標的觀測時間。
為此我們設定一徑向距離為5 km的目標,為排除噪聲的影響,不加噪聲。畫出相位差隨目標的橫向移動距離的變化曲線,如圖14所示,可以看到當目標橫向運動1.2 km后,實際相位差曲線與理想的相位差曲線發(fā)生了偏差,說明在目標徑向距離5 km的條件下,目標的橫向移動距離不應超過1.2 km,否則得到的相位差曲線是有偏差的,無法用于提取橫向速度。
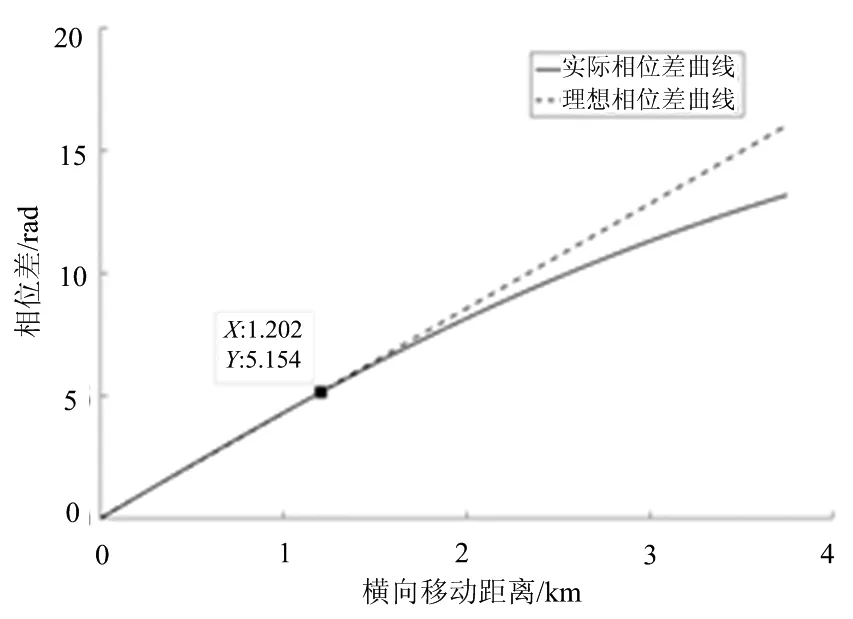
圖14 徑向距離5 km時的相位差曲線
對于其他徑向距離的目標,可以按照比例關系來得到目標的最大橫向移動距離,若知目標的橫向速度,則可以得到對應的觀測時間如下:
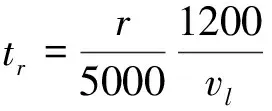
(16)
式中為目標徑向距離。在實際應用中可以針對觀測目標的運動特征估計大小范圍,得到合適的觀測時間。例如船只目標橫向速度一般不會超過20 m/s,所以對于5 km處的目標,其觀測時間不應超過60 s。若目標速度較大,對應的觀測時間會非常短,此時為保證積累的周期數(shù),需要有較大的信號采樣率。
另一個會給結果帶來誤差的因素是目標的加速度,若目標具有加速度,則相位差曲線不再為一直線,此時使用直線擬合則會帶來誤差。設定橫向速度大小為5 m/s,相干積累的幀數(shù)為100幀,表1給出了不同加速度下反演出的橫向速度,從表中可以看到當加速度不大于0.015 m/s時,反演出的橫向速度與真實值仍是較為接近的。但當加速度大小大于0.015 m/s時,與真實值的偏差會超過1 m/s。
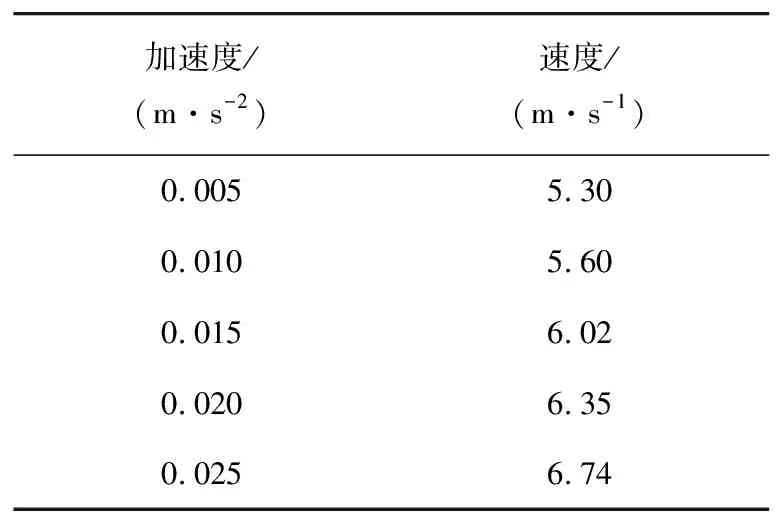
表1 不同加速度反演出的橫向速度
6 結束語
本文針對高頻地波雷達反演橫向速度準確度差的問題,提出對目標信號相干積累后再提取相位差變化率的方法。通過仿真得到了該方法在反演-25 dB信噪比信號的橫向速度時,其結果的RMSE僅為0.16 m/s左右,在反演-35 dB信噪比信號的橫向速度時,其RMSE也僅為0.5 m/s左右。并通過雷達實測數(shù)據(jù)處理驗證了該方法在實際場景下提取橫向速度的可行性。同時對該方法的局限性進行了分析,給出了不同距離下,不同速度目標所對應的觀測時間范圍公式,并通過仿真分析得到目標加速度不超過0.015 m/s時,該方法仍能保證一定的準確度。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06