分時多頻外輻射源雷達(dá)發(fā)射站定位方法
2022-07-01 08:16:38陳宇航饒云華潘宇盈萬顯榮吳敏淵
雷達(dá)科學(xué)與技術(shù) 2022年3期
陳宇航, 饒云華, 潘宇盈, 萬顯榮, 吳敏淵
(武漢大學(xué)電子信息學(xué)院, 湖北武漢 430072)
0 引言
外輻射源雷達(dá)是利用第三方輻射源信號(如廣播電視臺)進(jìn)行目標(biāo)探測定位的雙/多基地雷達(dá),具有覆蓋性能好、生存能力強、部署靈活等優(yōu)點。傳統(tǒng)外輻射源雷達(dá)在工作中,單個接收站一般只與一個發(fā)射站配對,通過參考通道接收該發(fā)射站的直達(dá)波以及通過監(jiān)測通道接收目標(biāo)反射回波,對獲取信號進(jìn)行處理后,可以得到目標(biāo)雙基地距離差、雙基地速度與到達(dá)角等量測值。但由于發(fā)射站不可控,外輻射源雷達(dá)這種系統(tǒng)配置與工作方式很難保證目標(biāo)的跟蹤連續(xù)性與定位精度。
采用多個發(fā)射站的不同頻率目標(biāo)回波進(jìn)行聯(lián)合探測,可以大幅度提升定位精度并擴大探測覆蓋區(qū)域。因此,在盡量減小系統(tǒng)規(guī)模與復(fù)雜度的前提下,采用外輻射源雷達(dá)分時多頻工作模式,通過周期性切換工作頻率,單個接收站可以與多個發(fā)射站配對,在不同時刻接收來自不同發(fā)射站的目標(biāo)回波,獲取目標(biāo)的空間分集信息,以此提高監(jiān)測與跟蹤性能。
收發(fā)站位置信息是外輻射源雷達(dá)工作的前提,接收站可根據(jù)需要靈活部署,其準(zhǔn)確的位置信息可實時獲取,而不可控的第三方發(fā)射站位置信息通常需要提前獲得。但在實際工作中,發(fā)射站往往會發(fā)生變化而無法預(yù)先獲取其位置,尤其是分時多頻外輻射源雷達(dá)需要利用多個發(fā)射站,因此,對分時多頻系統(tǒng)中的發(fā)射站進(jìn)行實時定位是首先需要解決的問題。
目前,關(guān)于外輻射源雷達(dá)的發(fā)射站定位研究并不多,文獻(xiàn)[8]通過合作目標(biāo)的雙基地距離差從而得到多個含有發(fā)射站位置信息的橢圓方程,多個橢圓間的交點即為發(fā)射站位置。文獻(xiàn)[9]利用合作飛行器的笛卡爾坐標(biāo)信息,將坐標(biāo)變換到雙基地坐標(biāo)系下后通過匹配雙基地距離與速度得到發(fā)射站位置。文獻(xiàn)[10]針對多目標(biāo)情況下關(guān)聯(lián)的復(fù)雜性,通過坐標(biāo)變換,建立距離和多普勒的代價函數(shù),正確穩(wěn)定關(guān)聯(lián)雙基地雷達(dá)目標(biāo)觀測值與真實信息,從而實現(xiàn)對發(fā)射站的定位。上述文獻(xiàn)提及方法都是針對傳統(tǒng)外輻射源雷達(dá)工作模式的單個發(fā)射站進(jìn)行定位,且都需要合作目標(biāo)配合,通過獲取足夠多的合作目標(biāo)精確位置信息來實現(xiàn)定位,其應(yīng)用場景往往受到局限性較大。
分時多頻外輻射源雷達(dá)系統(tǒng)本質(zhì)上是一個異步多傳感器系統(tǒng),在對未知位置的發(fā)射站設(shè)置位置初值后,則發(fā)射站的位置估計就可以轉(zhuǎn)換成求解傳感器系統(tǒng)固有偏差,從而將定位問題轉(zhuǎn)化成多傳感器誤差配準(zhǔn)過程。這樣就可以在目標(biāo)探測跟蹤過程中實現(xiàn)對發(fā)射站的實時現(xiàn)場定位,可以提高外輻射源雷達(dá)的環(huán)境適應(yīng)性與布設(shè)靈活性。
關(guān)于多傳感器系統(tǒng)的誤差配準(zhǔn)問題,主要方法有基于加權(quán)最小二乘(Weighted Least Squares, WLS)理論、基于最大似然(Maximum Likelihood, ML)準(zhǔn)則以及基于卡爾曼濾波器的空間配準(zhǔn)算法。其中,文獻(xiàn)[11]提出一種基于快坐標(biāo)下降的最小二乘方法,在異步量測中估計傳感器系統(tǒng)誤差。文獻(xiàn)[14]針對多輻射源系統(tǒng)的雙基地距離差量測存在固定偏差的情況,基于最小二乘算法,同時求解目標(biāo)位置與系統(tǒng)偏差。文獻(xiàn)[15-16]基于最大似然估計的空間配準(zhǔn)算法,通過使似然函數(shù)達(dá)到最大值,從而實現(xiàn)對目標(biāo)狀態(tài)和系統(tǒng)誤差的聯(lián)合估計。文獻(xiàn)[22]提出一種帶配準(zhǔn)誤差的增廣狀態(tài)高斯混合濾波器(Gaussian Mixture Hypothesis Density, GM-PHD)來提高量測關(guān)聯(lián)的正確率。文獻(xiàn)[23]討論了全局傳感器的無偏情況下,局部傳感器誤差配準(zhǔn)問題,提出了采用兩步擴展卡爾曼濾波算法估計量測偏差。
上述文獻(xiàn)方法均僅用于估計量測層面的較小偏差,并不適用于分時多頻外輻射源雷達(dá)量測異步且量測函數(shù)非線性情況的發(fā)射站坐標(biāo)誤差求解問題。
本文針對分時多頻外輻射源雷達(dá)系統(tǒng)的發(fā)射站定位問題,通過各自收發(fā)對量測估計完成時間配準(zhǔn),同時,通過設(shè)置發(fā)射站位置初值構(gòu)造參數(shù)為發(fā)射站坐標(biāo)偏差的偽量測,完成空間配準(zhǔn),采用卡爾曼濾波器對兩個發(fā)射站進(jìn)行定位。此方法無需合作目標(biāo)所提供的位置信息,而是僅利用接收站獲得的量測值便可對發(fā)射站進(jìn)行定位,并且可以達(dá)到較高定位精度。
1 探測定位模型
分時多頻外輻射源雷達(dá)二維探測示意圖如圖1所示:場景中有2個第三方發(fā)射站和1個接收站,發(fā)射站工作頻率分別為、,接收站周期性切換中心工作頻率分別與兩個發(fā)射站形成收發(fā)對,其周期通常為相干積累時間長度。接收站包含監(jiān)測天線與參考天線,分時接收兩個發(fā)射站的直達(dá)波和目標(biāo)反射回波,若收發(fā)對1在時刻開始目標(biāo)探測,則收發(fā)對2在(+1)時刻開始目標(biāo)探測(=2,=0,1,2,…)。
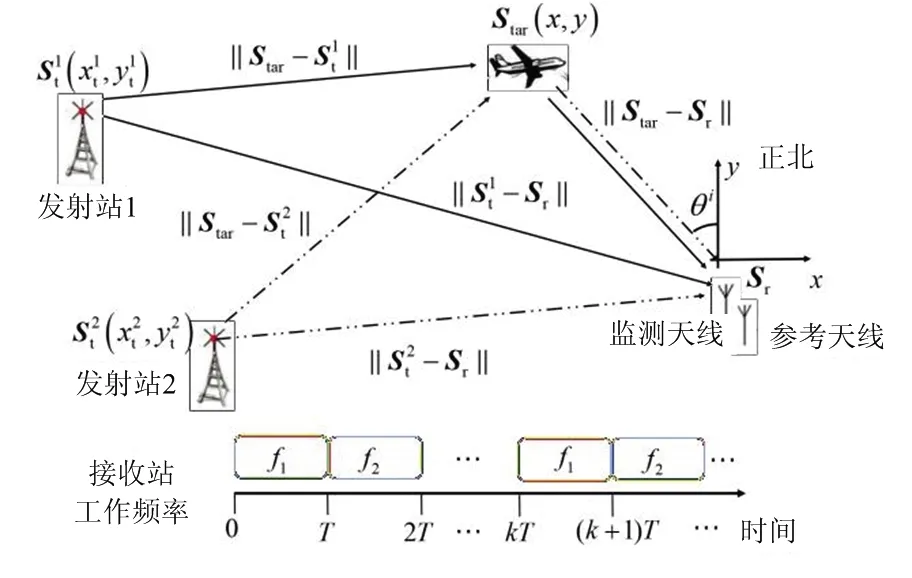
圖1 分時多頻外輻射源雷達(dá)二維探測示意圖
在探測目標(biāo)位置未知情況下,無法通過單個收發(fā)對自身量測值來定位發(fā)射站位置,因此需要獲取兩個收發(fā)對同一時刻的目標(biāo)量測值。由于兩個收發(fā)對采用分時切換方式對目標(biāo)進(jìn)行異步量測,故需要對每個收發(fā)對中缺失的量測值分別進(jìn)行估計,從而得到在時間上完整的量測序列,完成時間對齊。
(1)
同理,雙基地速度量測估計值為

(2)
由于接收站位置固定,收發(fā)對1的(+1)時刻方位角量測估計值可用收發(fā)對2該時刻方位角量測值替代。

(3)
同理,對收發(fā)對2也使用相同方式對其未獲取時間周期內(nèi)的量測值進(jìn)行估計,從而使得兩個收發(fā)對的目標(biāo)量測在時間上對齊。
由于兩個收發(fā)對在時間上對齊的量測值都是各自收發(fā)對的雙基地量測,需進(jìn)一步統(tǒng)一到公共笛卡爾坐標(biāo)系下。以接收站為原點,建立北東地(North East Down, NED)坐標(biāo)系,各自收發(fā)對結(jié)合所獲得的量測值進(jìn)行單站定位,便可得到目標(biāo)在該公共笛卡爾坐標(biāo)系下的位置信息。


(4)

(5)
若已知發(fā)射站準(zhǔn)確位置,單站定位可以得到目標(biāo)在公共笛卡爾坐標(biāo)系下的位置信息。但若發(fā)射站位置未知,對兩個發(fā)射站分別設(shè)定為帶有偏差的初值后,各自進(jìn)行單站定位,發(fā)射站坐標(biāo)存在固定偏差導(dǎo)致得到的目標(biāo)位置信息存在誤差,利用各自收發(fā)對得到的該目標(biāo)不準(zhǔn)確位置信息求解發(fā)射站坐標(biāo)固定偏差,從而可將發(fā)射站定位問題轉(zhuǎn)換為多傳感器固定系統(tǒng)偏差下的空間配準(zhǔn)問題。
2 基于偽量測構(gòu)造的發(fā)射站定位

(6)


(7)


(8)
將式(7)代入式(8)中,()相互抵消,得到時刻,發(fā)射站坐標(biāo)偏差()為參數(shù)的偽量測方程。
定義發(fā)射站坐標(biāo)偏差的狀態(tài)轉(zhuǎn)移方程與偽量測方程()如下:
()=(|-1)(-1)
(9)
()=()()+()
(10)

根據(jù)構(gòu)建的偽量測方程采用卡爾曼濾波器進(jìn)行遞推,多場濾波更新結(jié)果即為所求發(fā)射站坐標(biāo)偏差()。卡爾曼濾波遞推過程如下:
首先進(jìn)行一步預(yù)測
(|-1)=(|-1)(-1|-1)
(11)
(|-1)=(|-1)·
(-1|-1)(|-1)
(12)
(|-1)=()(|-1)
(13)
隨后計算濾波增益

(14)
最后完成更新
(|)=(|-1)+(()-(|-1))
(15)
(|)=(|-1)-

(16)
利用停止卡爾曼遞推后得到的結(jié)果(|)對初值進(jìn)行修正,即得到發(fā)射站坐標(biāo)估計值。
由于一階泰勒展開過程往往會帶來較大的線性化誤差,利用所得到發(fā)射站坐標(biāo)估計值,通過牛頓迭代方法,利用相同量測值再次進(jìn)行上述偽量測構(gòu)造與卡爾曼濾波過程,多次迭代后,即可得到最優(yōu)修正估計值,迭代修正公式如下:

(17)

3 克拉美羅下界(CRLB)分析
為了后續(xù)驗證算法性能性,本節(jié)將分析所求參數(shù)的克拉美羅下界(Cramer-Rao Lower Bound, CRLB)。假設(shè)量測噪聲為獨立同分布的零均值高斯白噪聲,收發(fā)對的量測噪聲項()=[(),()]的噪聲協(xié)方差矩陣()為
(18)

(19)
式中,
(20)


(21)
式中,()是關(guān)于所求參數(shù)的Fisher信息矩陣(Fisher Information Matrix, FIM)。具體可表示為

(22)
其中,

(23)
4 仿真實驗
本節(jié)通過仿真測試評估所提算法性能,仿真場景設(shè)置如下:兩個未知位置的發(fā)射站,一個已知位置的接收站,接收站坐標(biāo)=[0,0] km,發(fā)射站的坐標(biāo)分別為[8.3,2.6] km、[-5.4,6.6] km。接收站周期性切換工作頻率,異步接收來自不同發(fā)射站的回波信號,接收站頻率切換周期=1 s。假設(shè)兩個收發(fā)對所有量測噪聲為獨立同分布的零均值高斯白噪聲。目標(biāo)在兩個收發(fā)對共同探測區(qū)域內(nèi)勻加速運動,目標(biāo)運動起點為[9.2,5.4] km,沿橫縱坐標(biāo)軸正方向上的初始速度0=120 m/s、0=100 m/s,加速度為0=0.3 m/s、0=-0.8 m/s,運動時間為100 s。
算法性能評價指標(biāo)采用發(fā)射站位置估計的均方根誤差(Root Mean Squared Error, RMSE),其定義如下:

(24)

4.1 不同量測噪聲標(biāo)準(zhǔn)差下發(fā)射站定位結(jié)果
雙基地距離差量測、方位角量測的噪聲標(biāo)準(zhǔn)差表示為=[,]。設(shè)定迭代終止閾值=0.01 m。表1給出了發(fā)射站位置在不同量測噪聲標(biāo)準(zhǔn)差時的位置估計RMSE。其中表示第個發(fā)射站位置估計克拉美羅下界。由表1可知,第個發(fā)射站,得到的定位結(jié)果接近對應(yīng)下的,且當(dāng)量測噪聲標(biāo)準(zhǔn)差為零時,可以得到發(fā)射站位置坐標(biāo)的無偏估計。
另外,量測噪聲標(biāo)準(zhǔn)差相同時,與不一致,根據(jù)定位方程式,分析可知,如果兩個發(fā)射站與接收站、目標(biāo)之間的幾何關(guān)系不同,那么偽量測構(gòu)造過程會對目標(biāo)量測進(jìn)行不同的非線性處理,由式(4)可以看出:基線距離越長,雙基地距離差量測噪聲誤差帶來的影響會加大,同時,方位角量測噪聲影響會變小,幾何關(guān)系不同導(dǎo)致了各自位置估計的不一致。
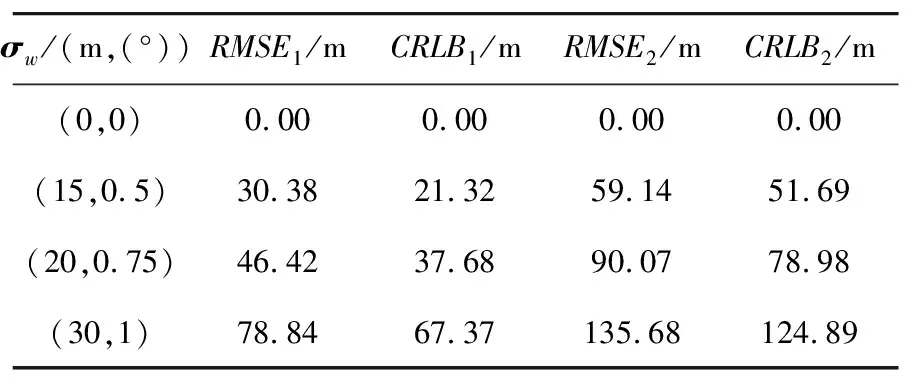
表1 不同量測噪聲標(biāo)準(zhǔn)差發(fā)射站位置估計RMSE
4.2 不同偽量測對所提算法性能影響
為了測試不同偽量測的對所提算法的性能影響,本節(jié)對比分析了所提算法與文獻(xiàn)[24]中傳統(tǒng)算法的性能差異。在傳統(tǒng)算法中,多傳感器系統(tǒng)進(jìn)行空間配準(zhǔn)時,通過目標(biāo)坐標(biāo)(,)構(gòu)造偽量測。由于這種配準(zhǔn)方法目前主要應(yīng)用于主動雷達(dá)領(lǐng)域估計量測固定偏差,故本文重新實現(xiàn)了該傳統(tǒng)方法構(gòu)造偽量測在外輻射源雷達(dá)中的進(jìn)行發(fā)射站定位的實驗;設(shè)置雙基地距離差、雙基地速度、方位角量測噪聲標(biāo)準(zhǔn)差分別為30 m、1.5 m/s、1°。不同偽量測對所提算法性能的影響如圖2所示。
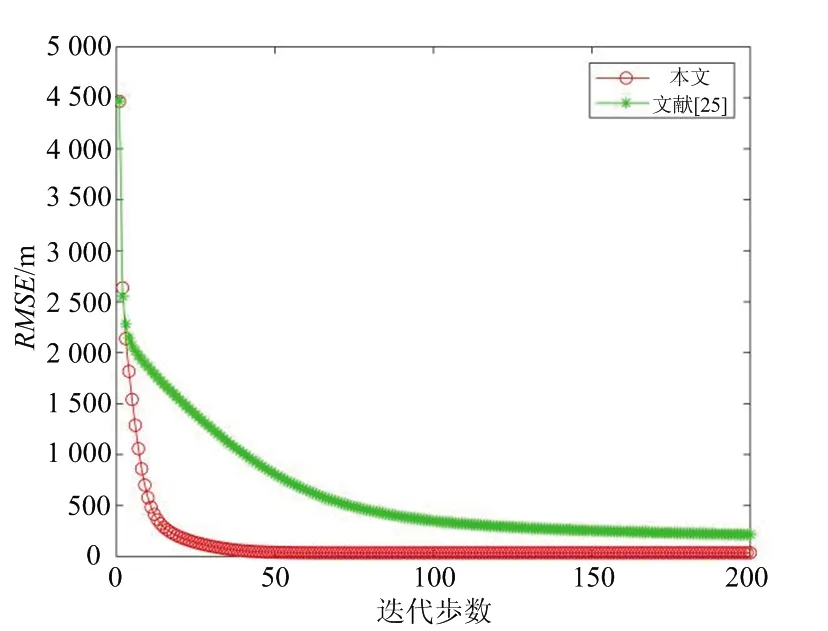
(a) 不同偽量測對應(yīng)的定位結(jié)果(發(fā)射站1)

(b) 不同偽量測對應(yīng)的定位結(jié)果(發(fā)射站2)圖2 不同偽量測對所提算法性能的影響
由圖2分析得出發(fā)射站定位結(jié)果在開始迭代時快速下降,然后下降變緩,最后收斂于一個穩(wěn)定值。收斂速度方面,要滿足兩個發(fā)射站位置估計均達(dá)到收斂,采用本文偽量測處理需要50步迭代,而采用文獻(xiàn)[24]方法構(gòu)造的偽量測處理需要進(jìn)行180步迭代,這是由于偽量測矩陣維數(shù)不同導(dǎo)致收斂速度有所差別。定位精度方面,本文所得到發(fā)射站位置估計足夠小,可以滿足精度要求,而文獻(xiàn)[24]方法得到的發(fā)射站位置估計依然存在較大誤差。以上結(jié)果與分析表明采用本文方法構(gòu)造偽量測最后得到發(fā)射站位置估計精度更高且收斂速度更快,可以大幅降低計算量。
4.3 發(fā)射站初始值對所提算法性能影響
在本文算法開始,需要對發(fā)射站坐標(biāo)設(shè)置一個初始值。實際應(yīng)用中,根據(jù)發(fā)射站直達(dá)波到達(dá)角度,可以得知發(fā)射站的大致方位信息,以此作為依據(jù),根據(jù)距離發(fā)射站位置的遠(yuǎn)近對發(fā)射站設(shè)置三種初始值情況分別進(jìn)行仿真。情況1:對兩個發(fā)射站設(shè)置初始坐標(biāo)分別為[2,0.7] km、[-1.5,1.7] km;情況2:初始坐標(biāo)設(shè)置為[4,1.4] km、[-3,3.4] km;情況3:初始坐標(biāo)設(shè)置為[6,2.1] km、[-4.5,5.1] km。發(fā)射站初值對所提算法性能影響如圖3所示,其中量測噪聲與上一小節(jié)相同。

(a) 不同初始值對應(yīng)的定位結(jié)果(發(fā)射站1)
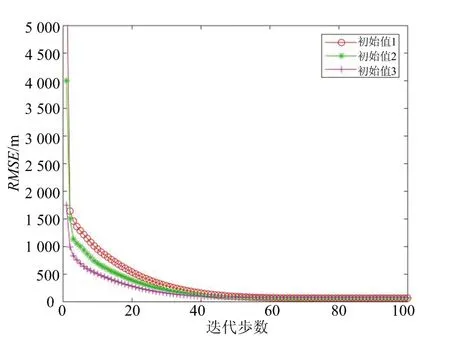
(b) 不同初始值對應(yīng)的定位結(jié)果(發(fā)射站2)圖3 發(fā)射站初值對所提算法性能影響
由圖3分析得出設(shè)定不同發(fā)射站坐標(biāo)初始值,經(jīng)過數(shù)次迭代,在近似相同迭代步數(shù)處收斂于一個穩(wěn)定值,且最后結(jié)果并無明顯區(qū)別,說明本文所提算法對發(fā)射站初始值不敏感,具有一定的魯棒性。
5 結(jié)束語
針對分時多頻外輻射源雷達(dá)發(fā)射站實時定位問題,本文構(gòu)建了時間同步后的發(fā)射站坐標(biāo)空間配準(zhǔn)模型,將兩個收發(fā)對目標(biāo)笛卡爾坐標(biāo)系狀態(tài)差值與發(fā)射站坐標(biāo)偏差組合在同一量測方程中,給出了基于偽量測構(gòu)造的擴展迭代卡爾曼濾波發(fā)射站定位算法,該方法無需獲得合作目標(biāo)信息,便可有效處理多個發(fā)射站定位問題。仿真結(jié)果表明,此方法均方根誤差接近克拉美羅下界,且收斂速度快。