多機(jī)器人協(xié)作的靈活性分析與仿真
2022-07-04 12:08:14陶平鄒成文王天瑞
制造技術(shù)與機(jī)床 2022年7期
關(guān)鍵詞:系統(tǒng)
陶平 鄒成文 王天瑞
(①武漢科技大學(xué)冶金裝備及其控制教育部重點(diǎn)實(shí)驗(yàn)室,湖北 武漢 430081;②武漢科技大學(xué)機(jī)械傳動(dòng)與制造工程湖北省重點(diǎn)實(shí)驗(yàn)室,湖北 武漢 430081)
現(xiàn)代工業(yè)中,多機(jī)器人協(xié)作系統(tǒng)具有更高的自由度、較大負(fù)載能力和靈活操作方式,可以完成更加復(fù)雜的任務(wù)。多機(jī)器人協(xié)作系統(tǒng)的運(yùn)動(dòng)靈活性反映了協(xié)作系統(tǒng)整體協(xié)調(diào)操作的運(yùn)動(dòng)能力,其機(jī)械臂的協(xié)調(diào)運(yùn)動(dòng)靈活性直接影響協(xié)作系統(tǒng)的整體運(yùn)動(dòng)性能[1]。
目前國(guó)內(nèi)外學(xué)者對(duì)機(jī)械臂的靈活性進(jìn)行了大量的研究,李憲華[2]采用基于雅克比SVD可操作度的指標(biāo),評(píng)估了單機(jī)械臂的操作能力。符曉[3]利用雅克比矩陣條件數(shù),求出6R機(jī)器人在工作空間內(nèi)各處的奇異度,并將其可視化。孫青[4]針對(duì)雙臂6R服務(wù)機(jī)器人,進(jìn)行了靈活性分析,研究了雙臂在協(xié)調(diào)操作過程中的奇異性和靈活性。潘建龍[5]闡述了多機(jī)器人協(xié)作時(shí)可操作度的定義,對(duì)多機(jī)器人焊接系統(tǒng)進(jìn)行了最優(yōu)軌跡的規(guī)劃。Paul R P等[6]針對(duì)非冗余度機(jī)器人的運(yùn)動(dòng)特點(diǎn),采用雅可比矩陣的行列式分析出腕關(guān)節(jié)的位姿。Yang D C H等[7]對(duì)機(jī)器人條件數(shù)進(jìn)行了定義,Angeles J等[8]將條件數(shù)作為機(jī)器人靈活性的評(píng)價(jià)指標(biāo),并將這一指標(biāo)用來分析機(jī)器人動(dòng)力學(xué)性能。當(dāng)前,多機(jī)器人協(xié)作大多集中在雙機(jī)器人協(xié)作的研究上,國(guó)內(nèi)對(duì)多機(jī)器人協(xié)調(diào)操作的靈活性研究較少。
基于以上分析,本文針對(duì)多機(jī)器人系統(tǒng)在工業(yè)應(yīng)用中的運(yùn)動(dòng)特征,選用可操作度為機(jī)器人靈活性評(píng)價(jià)指標(biāo),并根據(jù)該指標(biāo)的定義分析得到多機(jī)器人系統(tǒng)整體可操作度的數(shù)學(xué)評(píng)價(jià)模型。同時(shí)提出了一種求取機(jī)器人在單位節(jié)點(diǎn)多姿態(tài)下的加權(quán)可操作度數(shù)值的算法,采用該算法計(jì)算多機(jī)器人系統(tǒng)在協(xié)作空間內(nèi)的整體可操作度,并將多機(jī)器人系統(tǒng)的靈活性可視化表達(dá)出來,由此得到靈活性較高的區(qū)域,為以后的多機(jī)器人協(xié)調(diào)運(yùn)動(dòng)的軌跡規(guī)劃打下基礎(chǔ)。
1 多機(jī)器人系統(tǒng)模型
1.1 運(yùn)動(dòng)學(xué)分析
以3個(gè)六自由度的IRB1410機(jī)器人組成的多機(jī)器人焊接系統(tǒng)為研究對(duì)象。在該系統(tǒng)中,其中2個(gè)機(jī)器人1和2起搬運(yùn)作用,將工件夾持到工作空間中,而焊接機(jī)器人3則對(duì)工件進(jìn)行焊接操作,多機(jī)器人協(xié)作焊接系統(tǒng)圖如圖1所示。

圖1 多機(jī)器人協(xié)作系統(tǒng)示意圖
多機(jī)器人協(xié)作系統(tǒng)進(jìn)行作業(yè)時(shí),各機(jī)器人的基座位置固定,其相對(duì)位置始終不變,即{B1}、{B2}、{B3}固定,機(jī)器人基坐標(biāo)系到世界坐標(biāo)系{W}的齊次變換矩陣是一個(gè)定值。作業(yè)中,2個(gè)搬運(yùn)機(jī)器人1和2夾持工件,兩搬運(yùn)機(jī)器人之間的運(yùn)動(dòng)關(guān)系存在緊協(xié)調(diào)運(yùn)動(dòng)關(guān)系;焊接機(jī)器人3進(jìn)行焊接時(shí),它與搬運(yùn)機(jī)器人之間的運(yùn)動(dòng)關(guān)系是松協(xié)調(diào)運(yùn)動(dòng)關(guān)系,其協(xié)調(diào)關(guān)系如下:
(1)緊協(xié)調(diào):兩搬運(yùn)機(jī)器人搬運(yùn)工件時(shí)存在,在該過程中,兩機(jī)器人之間無相對(duì)運(yùn)動(dòng),相對(duì)位姿保持不變,速度保持同步,滿足關(guān)系

式中:x1、x2分別表示兩搬運(yùn)機(jī)器人的末端位姿向量;U表示兩個(gè)搬運(yùn)機(jī)器人之間的齊次變換矩陣。
(2)松協(xié)調(diào):存在于焊接機(jī)器人與搬運(yùn)機(jī)器人之間,滿足關(guān)系

式中:x3表示焊接機(jī)器人的末端位姿向量;α(t)表示搬運(yùn)機(jī)器人與焊接機(jī)器人還存在相對(duì)運(yùn)動(dòng),為時(shí)變向量。
1.2 協(xié)作空間分析
對(duì)其中的焊接機(jī)器人建立D-H坐標(biāo)系,如圖2所示。由此得到D-H坐標(biāo)參數(shù),如表1所示。表1中,θi為第i個(gè)關(guān)節(jié)的角度值,di為相鄰關(guān)鍵之間的桿件長(zhǎng)度,ai為相鄰關(guān)節(jié)之間的桿件偏移量,αi為相鄰坐標(biāo)系之間的扭轉(zhuǎn)角。同理,2個(gè)搬運(yùn)機(jī)器人的D-H坐標(biāo)建立方法同上,在此不再贅述。

圖2 焊接機(jī)械臂D-H坐標(biāo)系

表1 焊接機(jī)器人連桿D-H參數(shù)
利用Robotics工具箱,搭建多機(jī)器人協(xié)作系統(tǒng)模型的仿真平臺(tái),如圖3所示。圖3中,兩搬運(yùn)機(jī)械臂和焊接機(jī)械臂的基座坐標(biāo)分別為(?1,?1,0)、(1,?1,0)、(0,1,0)。

圖3 多機(jī)器人協(xié)作系統(tǒng)模型
圖2中,d1=475mm,d4=720mm,d6=85mm,a1=150mm,a2=600mm,a3=120mm。
相鄰兩連桿之間的齊次坐標(biāo)變換矩陣為

式中:cθi表示cosθi;cαi表示cosαi;sθi表示sinθi;sαi表示sinαi。
結(jié)合機(jī)械臂的正運(yùn)動(dòng)學(xué)方程、表1的參數(shù)和上面的公式,利用蒙特卡羅法,可以得到焊接機(jī)器人的工作空間,同理也可得到2個(gè)搬運(yùn)機(jī)器人各自的工作空間,由3個(gè)機(jī)器人工作空間的交集得到協(xié)作空間的范圍,如圖4所示。
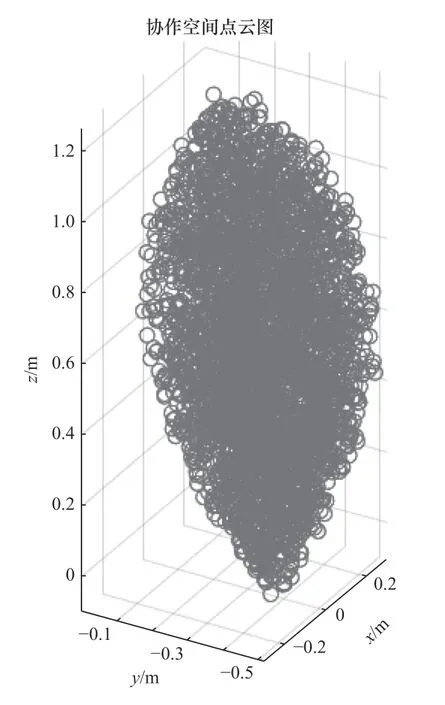
圖4 協(xié)作空間點(diǎn)云圖
2 多機(jī)器人靈活性評(píng)價(jià)
機(jī)器人運(yùn)動(dòng)靈活性評(píng)價(jià)指標(biāo),主要有條件數(shù)、可操作度及各向同性指標(biāo)等,其中可操作度、條件數(shù)和最小奇異值是比較經(jīng)典的3個(gè)靈活性評(píng)價(jià)指標(biāo)[2]。可操作度作為衡量機(jī)器人靈活性的重要指標(biāo)之一,被廣泛運(yùn)用機(jī)器人尺寸優(yōu)化、運(yùn)動(dòng)性能優(yōu)化等各個(gè)方面,用來改善機(jī)器人的傳輸性能,從而提高工作效率[9?10]。
本文選取可操作度作為機(jī)器人執(zhí)行任務(wù)時(shí)的靈活性評(píng)價(jià)指標(biāo)。
2.1 機(jī)器人可操作度定義
可操作度定義為機(jī)器人對(duì)任意改變末端執(zhí)行器位置和方向的能力,是一個(gè)非常重要的評(píng)價(jià)指標(biāo)。可操作度越大,機(jī)器人從關(guān)節(jié)空間到工作空間運(yùn)動(dòng)的轉(zhuǎn)換能力就越強(qiáng),靈活程度越好。
雅可比矩陣表示了機(jī)器人運(yùn)動(dòng)時(shí)自關(guān)節(jié)空間到操作空間的運(yùn)動(dòng)速度的傳遞關(guān)系,可得

式中:x為操作空間的坐標(biāo),x∈Rm,Rank(J(q))≤m,x˙為操作空間的速度;q為關(guān)節(jié)空間坐標(biāo),q∈Rn;q˙為關(guān)節(jié)空間的速度;J(q)為雅克比矩陣,J(q)∈Rm×n。
機(jī)器人可操作度的定義為

可操作度的大小表現(xiàn)了機(jī)器人在操作空間中各個(gè)方向傳遞速度的能力,根據(jù)可操作度的定義可知,當(dāng)可操作度ω=0時(shí),J(q)=0,機(jī)器人瞬時(shí)位于奇異位形。
2.2 多機(jī)器人可操作度
在多機(jī)器人協(xié)作工作時(shí),協(xié)作系統(tǒng)靈活性反映了其整體的傳力和傳速性能。在協(xié)作系統(tǒng)中,存在緊協(xié)調(diào)和松協(xié)調(diào)兩種不同的協(xié)作關(guān)系,在計(jì)算可操作度時(shí),先分別計(jì)算各自的可操作度,再計(jì)算協(xié)作系統(tǒng)的可操作度。
兩搬運(yùn)機(jī)器人滿足緊協(xié)調(diào)關(guān)系時(shí),兩機(jī)器人之間的運(yùn)動(dòng)可描述為


式中:J(q)1、J(q)2分別為兩搬運(yùn)機(jī)器人的雅克比矩陣。
由此,得到兩搬運(yùn)機(jī)器人的可操作度Mt的定義為

焊接機(jī)器人與搬運(yùn)機(jī)器人之間的運(yùn)動(dòng)關(guān)系為松協(xié)調(diào),需要單獨(dú)計(jì)算它的可操作度。
綜合上述考慮,得到多機(jī)器人協(xié)作時(shí)的可操作度MMR為

式中:α1為兩搬運(yùn)機(jī)器人的靈活性系數(shù),α2為焊接機(jī)器人的靈活性系數(shù),根據(jù)系統(tǒng)中所有機(jī)器人可操作度橢球的體積交集大小占各個(gè)橢球體積的比值,可確定出α1和α2;Mt為兩搬運(yùn)機(jī)器人的可操作度;Ml為焊接機(jī)器人可操作度。
3 多機(jī)器人協(xié)作空間靈活性分析
機(jī)器人的工作空間分為可達(dá)空間和靈巧空間。其中,可達(dá)空間即為機(jī)器人可以到達(dá)的所有點(diǎn)構(gòu)成的空間;而靈巧空間為機(jī)器人以任意姿態(tài)能到達(dá)的點(diǎn)所構(gòu)成的空間。機(jī)器人的奇異點(diǎn)指在工作空間中,由于機(jī)器人位于一些特殊位姿(如軸線相交或者平行等)關(guān)系時(shí),機(jī)器人喪失1個(gè)或者多個(gè)自由度,導(dǎo)致機(jī)器人在某個(gè)方向上傳遞速度為0,即機(jī)器人在此時(shí)處于卡死狀態(tài)。根據(jù)前文的分析,當(dāng)機(jī)器人處于奇異位形時(shí),可操作度ω=0,可以得到此時(shí)機(jī)器人的雅可比矩陣J(q)=0,由矩陣的定義可知,Rank(J(q)) 本文的研究中,將每個(gè)轉(zhuǎn)角分為11份,步長(zhǎng)為0.2π,可以得到對(duì)應(yīng)的位姿矩陣,根據(jù)算法可以計(jì)算出對(duì)應(yīng)點(diǎn)的可操作度。本文首先分析了焊接機(jī)器人在工作空間內(nèi)的可操作度,考慮到在z=0.69m的平面上,其工作空間面積最大,給出該平面內(nèi)焊接機(jī)器人的可操作度分布情況,如圖5所示。圖5中,對(duì)該平面的x軸和y軸等間距劃分為21等份,所取得的樣本工作點(diǎn)共441個(gè)。利用網(wǎng)格節(jié)點(diǎn)的顏色來表征可操作度ωi的值,由此得到焊接機(jī)械臂在工作空間內(nèi)其可操作度分布情況,其中右側(cè)的豎條表征了不同顏色所代表的可操作度值。 圖5 z=0.69m 平面下焊接機(jī)器人可操作度分布 同樣方法可以得出多機(jī)器人在協(xié)作空間內(nèi)的可操作度分布情況,圖6給出了z=0.69m的平面上3個(gè)機(jī)器人協(xié)作時(shí)的可操作度MMR的分布情況,其中右側(cè)的豎條表征了不同顏色所代表的可操作度值,由圖6中可以看出,在黑色區(qū)域可操作度趨近于0,此時(shí)由于某個(gè)機(jī)器人接近或處于奇異位形,導(dǎo)致協(xié)作系統(tǒng)靈活性最差,而灰白色區(qū)域可操作度較大,協(xié)作系統(tǒng)靈活性較好。 圖6 z=0.69m 平面下多機(jī)器人可操作度分布 對(duì)多機(jī)器人系統(tǒng)的協(xié)作空間的整體可操作度進(jìn)行計(jì)算并歸一化處理,得到協(xié)作空間內(nèi)系統(tǒng)的靈活性表達(dá)剖視圖,在MATLAB中可視化表達(dá)出來,如圖7所示。圖7中,用多種顏色分別表示多機(jī)器人協(xié)作時(shí)的靈活性程度,系統(tǒng)的靈活性范圍在[0,0.2)的區(qū)域用藍(lán)色表示;系統(tǒng)的靈活性范圍在[0.2,0.4)的區(qū)域用青色表示;系統(tǒng)的靈活性范圍在[0.4,0.6)的區(qū)域用綠色表示;系統(tǒng)的靈活性范圍在[0.6,0.8)的區(qū)域用黃色表示;系統(tǒng)的靈活性范圍在[0.8,1]的區(qū)域用紅色表示。從圖中可以得到多機(jī)器人協(xié)作的系統(tǒng)靈活性的分布規(guī)律。 圖7 協(xié)作空間靈活性剖視圖 由多機(jī)器人協(xié)作系統(tǒng)在協(xié)作空間中的靈活性分布情況可知,工作范圍在(x、y、z單位為m)x∈[?0.1,0.1],y∈[0.15,0.35],z∈[0.55,0.75]區(qū)域的多機(jī)器人協(xié)作靈活性較高,因此,在進(jìn)行運(yùn)動(dòng)規(guī)劃時(shí),應(yīng)當(dāng)盡量保證工作區(qū)域在x∈[?0.1,0.1],y∈[0.15,0.35],z∈[0.55,0.75]的范圍內(nèi)。而靠近協(xié)作空間邊界的部分無法實(shí)現(xiàn)多機(jī)器人協(xié)作,機(jī)器人運(yùn)動(dòng)靈活性最差。分析可知,點(diǎn)C0(0,0.25,0.6)位于靈活性較高區(qū)域的中心點(diǎn),因此,將該點(diǎn)作為最優(yōu)初始焊接位置點(diǎn),搬運(yùn)機(jī)器人搬運(yùn)工件到協(xié)作空間內(nèi),并將工件坐標(biāo)系原點(diǎn)與該點(diǎn)重合,然后配合焊接機(jī)器人進(jìn)行焊接任務(wù),如此可以保證工件上的焊縫點(diǎn)均處于靈活性較高的區(qū)域,從而確保多機(jī)器人協(xié)作系統(tǒng)在焊接過程中的運(yùn)動(dòng)靈活性。 本文以多機(jī)器人協(xié)作系統(tǒng)為研究對(duì)象,通過蒙特卡羅法得到多機(jī)器人協(xié)作空間,采用可操作度作為靈活性指標(biāo),建立了一種用于多機(jī)器人協(xié)作系統(tǒng)的靈活性評(píng)價(jià)模型,并使用MATLAB進(jìn)行仿真將系統(tǒng)的靈活性可視化,從而選取機(jī)器人合適的操作空間。在本文選取的靈活性高的空間工作的基礎(chǔ)下,為后續(xù)多機(jī)器人的軌跡規(guī)劃做好鋪墊。


4 結(jié)語
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
