基于改進AFSA的槳扇發動機加速控制計劃優化
2022-07-05 08:22:04邢耀仁黃向華
航空發動機 2022年2期
邢耀仁,黃向華
(南京航空航天大學能源與動力學院,南京 210016)
0 引言
航空發動機的過渡態是指發動機由一種工作狀態改變到另一種工作狀態的變化過程,加速時間是衡量發動機過渡態性能的重要指標之一。在滿足發動機性能參數約束的前提下,盡可能縮短加速時間可以最大限度地提升發動機動態性能,因此對加速控制計劃進行優化具有重要的工程應用價值。
航空發動機是氣動熱力計算高度復雜的非線性系統,直接對其進行滿足參數約束下的過渡態性能尋優很困難,目前常用的尋優方法有2種:(1)功率提取法,即在發動機穩態模型基礎上,從高、低壓轉子提取額外的功率,使高壓壓氣機的起動工作點沿著等換算轉速線移動,在滿足約束前提下,盡可能使提取功率更大,從而獲得最佳的加速控制規律;(2)動態規劃法,即在發動機動態模型基礎上建立可以實現性能需求的目標函數,并求解1個有約束的泛函優化問題,該方法目前被廣泛應用于發動機過渡態控制優化中。運用的主要優化算法有約束變尺度法、序列二 次 規 劃 法(Sequential Quadratic Programming,SQP)、線性二次型調節器(Linear Quadratic Regulator,LQR)法、自適應方法和元啟發式算法等。由于約束變尺度法等傳統算法都是基于梯度概念來尋優的,既要求目標函數和約束條件可微,又容易陷入局部最優解中。而啟發式算法通過模仿自然選擇過程,具有了生物進化的2個優勢——強化和多樣性。其中強化可以使算法向最優值附近搜索,多樣性可以保證最優值的全局最優性。人工魚群算法(Artificial Fish Swarm Algorithm,AFSA)是一種基于魚群行為的啟發式算法,具有簡單的結構形式和較好的全局尋優能力,在各類優化問題中得到了廣泛應用。王錫淮等通過引入半可行域的概念,提升了人工魚群算法求解帶約束問題的能力;范永利等針對人工魚群算法難以綜合考慮尋優速度和尋優精度的不足,通過引入雙高斯函數對算法進行了改進,提高了算法的全局尋優能力和搜索速度。
本文引入自適應調整策略和半可行域對人工魚群算法進行改進,在此基礎上,提出了一種槳扇發動機加速控制計劃的優化方法。
1 槳扇發動機過渡態控制問題
槳扇發動機作為一種介于傳統渦槳發動機和渦扇發動機之間的新概念發動機,具有優于渦槳發動機的高速性能和高于渦扇發動機的燃油效率。隨著環保要求的不斷提高,航空業對高效率、低排放動力裝置的需求為槳扇發動機的發展提供了機遇,因此對槳扇發動機進行研究具有一定的經濟和環保價值。現今槳扇發動機有多種實現方案。一種槳扇發動機的結構如圖1所示。該槳扇發動機采用的3轉子結構可以提升發動機的功率,采用的對轉槳扇可以抵消一部分力矩。基于以上優點,本文選取3轉子對轉槳扇發動機作為研究對象。
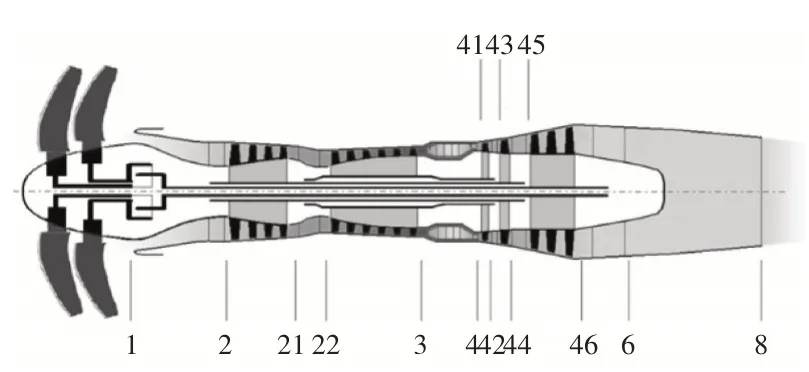
圖1 槳扇發動機結構
在飛行狀態給定時,發動機控制量確定了其工作狀態,槳扇發動機常用的控制量有供油量和前后槳扇槳距角、。對槳扇發動機加速控制計劃進行優化就是運用優化算法來求解發動機過渡態中1組最佳的控制序列[]=([][][]),使得發動機可以在最短的時間內從初始狀態到達目標狀態。要使用優化算法對發動機過渡態進行優化,需將發動機加速過程轉化為1個標準的優化問題,而轉化的第1步就是確定優化目標和約束條件。由于槳扇發動機的推力絕大部分都來自于前后槳扇葉片產生的推力,為了使槳扇發動機工作穩定,需保證工作時功率渦輪軸轉速保持100%不變,不能按傳統渦噴、渦扇發動機那樣通過轉速和推力的一一對應關系來間接確定推力。但槳扇的推力可以很方便地通過轉速和槳距角從特性圖中插值求得,因此本文直接對推力進行優化。
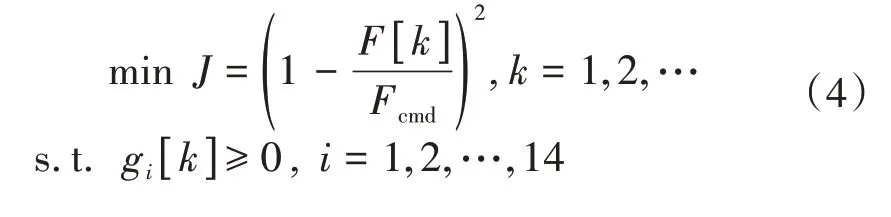
衡量發動機加速性能最直觀的指標就是加速時間,加速時間越短、超調量越小,往往說明發動機的加速性能越好。由于發動機的加速過程是連續的,需要將整個加速過程分割為一系列的靜態過程。在每段20 ms的加速過程中,通過優化算法計算當前狀態下的最優控制量,使得推力在滿足約束的前提下達到當前狀態下能達到的最大值。如果加速過程中每個20 ms內的推力都增長到了當前狀態下所能達到的最大值,即當前推力與目標推力的差值最小,便可保證整個加速過程的時間最短。依此對目標函數進行轉化和離散處理,具體時間最優過程尋優的目標函數為

式中:[]為第個仿真步長中的目標函數;為目標推力,在每步中均保持為終態推力不變;[]為第個仿真步長結束后的預測推力。
通過該目標函數即可保證發動機推力在每個20 ms步長中都盡可能地接近目標推力值。
同時,槳扇發動機在加速過程中需要保證高壓軸轉速、低壓軸轉速、功率渦輪軸轉速、渦輪前溫度、高壓壓氣機喘振裕度和低壓壓氣機喘振裕度都處在安全范圍內。此外,、、等槳扇發動機的控制量也會受到執行機構調節范圍和調節速度的限制。綜上所述,槳扇發動機需要滿足以下12個約束
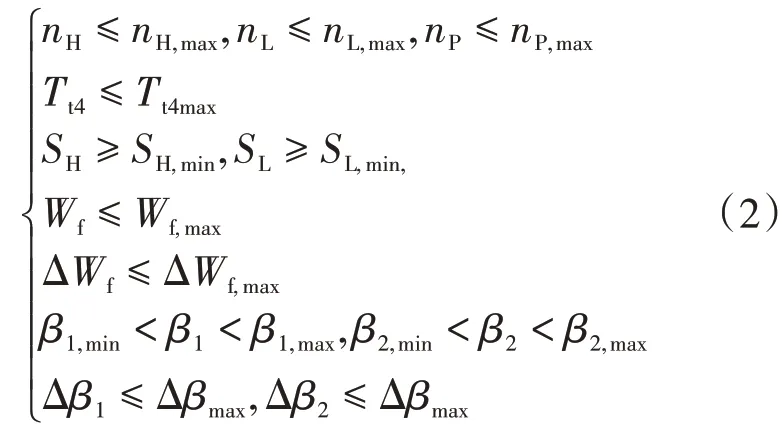
式中:、、為高壓軸、低壓軸、功率渦輪軸的最大轉速;為最高渦輪前溫度;、為高、低壓壓氣機最小喘振裕度;為發動機最大供油量;Δ為供油量變化速率;Δ為最大供油量變化速率;、為最大、最小前槳距角;、為最大、最小后槳距角;Δ、Δ為前、后槳距角的變化速率;Δ為最大槳距角調節速度。
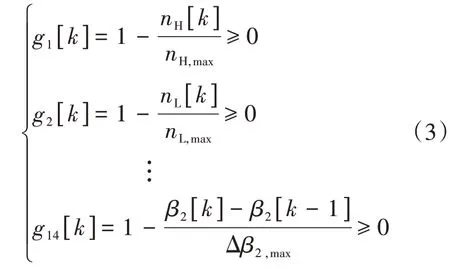
將槳扇發動機的安全約束經過歸一化處理轉化為以下14個約束函數
最終得到了最短時間加速控制計劃優化問題的標準數學形式
2 AFSA算法
2.1 算法簡介
人工魚群算法主要利用魚的3大基本行為:覓食、聚群和追尾行為,采用自上而下的尋優模式,從構造個體的底層行為開始,通過魚群中各個個體的局部尋優,達到全局最優值在群體中凸顯出來的目的。人工魚的3種基本行為簡述如下。
2.1.1 覓食行為
覓食行為是魚群循著食物多的方向游動的行為,是魚趨向食物的一種活動。人工魚視野如圖2所示。
人工魚X 在視野內隨機選擇一種狀態X

式中:為人工魚的視野半徑;為0~1之間的隨機值。
計算X 和X 的目標函數值Y 和Y ,如果Y 好于Y ,則X 向X 的方向移動1步

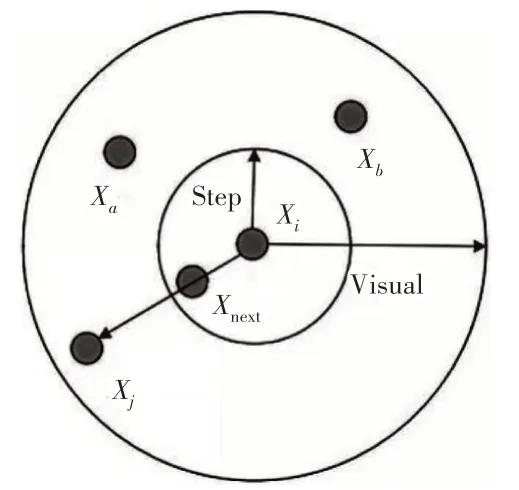
圖2 人工魚視野[16]
式中:為步長。
否則,X 繼續在視野內尋找X 并判斷是否滿足前進條件,尋找次數達到上限后仍未找到X 時,隨機前進1步

2.1.2 聚群行為
魚聚集成群可以集體覓食和躲避敵害,這是魚在進化過程中形成的一種生存方式。魚聚群時會遵守2條規則:(1)盡量向鄰近伙伴的中心移動;(2)避免過分擁擠。
人工魚X 搜索視野內的伙伴數量和中心位置,如果>δY (其中為擁擠度因子),則表明伙伴中心位置較好且不太擁擠,朝伙伴中心移動1步,否則執行覓食行為

2.1.3 追尾行為
當某1條魚或幾條魚發現食物時,附近的魚會尾隨而來,導致更遠處的魚也尾隨過來。
人工魚X 搜索視野內目標函數Y 最優的人工魚X ,若Y n>δY ,則表明伙伴位置較好且不太擁擠,朝最優人工魚移動1步,否則執行覓食行為。

2.2 算法改進
針對算法存在的后期搜索盲目性大的缺陷,文獻[16]通過引入雙高斯函數對覓食行為進行改進,因文獻中通過雙高斯函數獲取步長調節系數的計算參數過多、過于復雜,本文對步長的自適應調節機制進行簡化。另外,由于原始算法無法求解帶約束問題,本文參考[15]引入半可行域思想來處理約束。
2.2.1 動態調整視野和步長
視野對人工魚群算法的行為和收斂性能有較大影響。視野范圍較大時,人工魚的全局搜索性能強并能快速接近最優點,但可能會在最優值附近出現振蕩現象,難以穩定;視野范圍較小時,人工魚的局部搜索能力強,可以更精確地接近最優值,但存在收斂速度慢的缺點。
對于發動機這一類強非線性系統,尋優前期應該加強全局搜索能力,在大致定位到最優值的位置后改為加強局部搜索能力。因此在算法運行前期,為了增強算法的全局搜索能力和收斂速度,采用較大的視野和步長,使人工魚可以在大范圍內進行粗搜索;隨著搜索的進行,逐漸減小視野和步長,最后算法在最優解附近進行精細搜索,從而提高算法的收斂速度和尋優結果的精度。
視野和步長的動態調整策略為
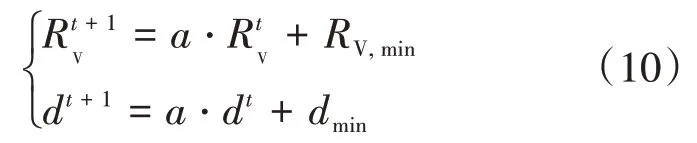
式中:為調節系數,需滿足前期從1開始緩慢減小,后期快速減小直到接近0,根據文獻[14]中一些算法實例,本文采用指數函數對進行調節
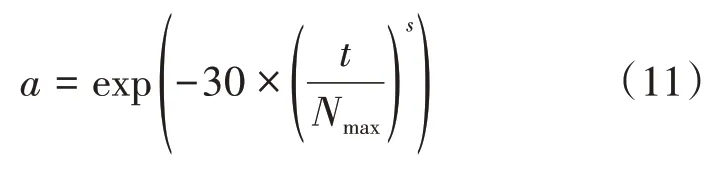
式中:為當前迭代次數;為最大迭代次數;為大于1的整數。
視野的初值選取為/ 4(為搜索寬度),步長的初值選取為/ 8,最小視野半徑=0.05,最小步長=0.005。
2.2.2 對覓食行為的改進
在人工魚群算法的覓食行為中,人工魚會隨機選擇一種狀態,如果該位置優于當前位置,則向該方向移動1步,但在該方式下人工魚只能前進不能后退,因此對人工魚的移動方式加以修改

2.2.3 對約束問題的處理
由于發動機參數有嚴格的限制條件,在尋優時必須對約束條件進行處理。為了最大限度地發揮發動機性能,在尋優時需要使發動機的工作點盡可能地接近限制邊界。如果只是簡單地讓可行解無條件地優于不可行解,易使尋優結果遠離邊界,陷入局部最優或者尋不到最佳性能點,因此本文引入半可行域的概念對約束進行處理,通過保留一定比例稍稍超過約束邊界的人工魚樣本,來保證尋優算法具有搜尋到邊界附近最優點的能力。
同時,由于發動機各物理量的數量級相差較大,直接使用物理量計算不利于各約束間的比較,影響尋優計算時的準確性。因此需要對各量進行歸一化處理。
對于歸一化后的不等式約束極值問題的標準形式為

引入評價人工魚與約束邊界接近程度的函數()

對于1個給定的正數,有()≤,則將該人工魚樣本定義為半可行點,將其保留并參與后續的優化過程;對于()>的人工魚樣本則直接舍去,并用重新生成的人工魚樣本來代替。
為了保證人工魚樣本集合中保留一定比例的半可行點,引入對閾值的自適應調節機制
式中:為半可行點在所有樣本中所占的比例;為要保持的半可行點所占比例的目標值;為閾值每次動態調整的步長。
最終篩選樣本時從優到劣排列的標準為:
(1)可行點嚴格優于半可行點;
(2)可行點間目標函數值更佳的為優;
(3)半可行點間()值較小的為優。
2.3 算法步驟
對人工魚群算法進行改進后,算法求解步驟如下。
定義魚群規模、初始可視域半徑、擁擠度因子、初始移動步長、最大嘗試次數、最大迭代次數、半可行點判定閾值、半可行點比例和閾值調整步長,在約束范圍內隨機生成人工魚群樣本;
計算初始魚群每個個體的目標函數值,將最優人工魚的位置和目標函數值記錄在公告板中;
分別執行聚群行為和追尾行為,如果滿足移動條件,則向2種行為中更優的方向移動1步,如果均不滿足移動條件,則執行覓食行為;
評價新一代魚群的所有個體,如果某個體目標函數值優于公告板值,則更新公告板上最優解的位置和目標函數值;
計算半可行點在魚群中的比例,按結果調整半可行點判斷閾值;
如果前后2代的最優人工魚個體目標函數值沒有滿足一定的精度要求或計算代數沒有達到最大次數,返回到步驟3;
尋優結束,輸出結果。
2.4 算法驗證
為了驗證改進后的人工魚群算法的尋優性能是否優于標準的人工魚群算法,本文選取表1中的標準測試函數進行驗證。驗證算法的具體參數為:=100,=1,=0.618,=0.05,=100,=1000,=0.01,=15%,=0.005。
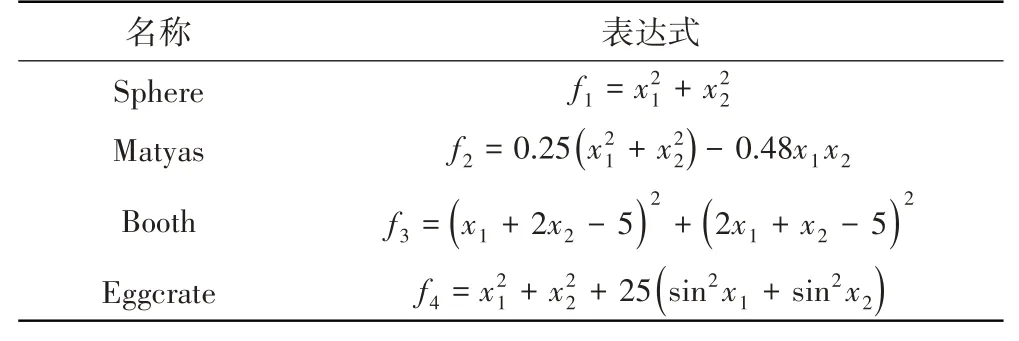
表1 標準測試函數
用2種算法對每個標準測試函數分別測試5次,記錄尋優結果的最優值、最差值、平均值和平均優化代數,并與文獻[16]中同測試函數下的雙高斯法改進結果進行對比,文獻中魚群算法參數與前2種算法的一致。仿真環境為:Intel?Core?i5-8300H CPU@2.30 GHz,16 GB內存,Win10 64位操作系統,VS2010編程。具體尋優結果對比見表2。
從表中可見,3種算法的最優解均能在約束范圍內接近理論最優值0,可以在一定程度上驗證本文算法程序的正確性。與原始AFSA相比,改進后的AFSA平均迭代次數減少幅度較為明顯,平均尋優結果精度的數量級提升較為明顯,說明改進后的AFSA較原始AFSA具備更快的收斂速度和更高的收斂精度。將本文改進AFSA尋優結果與文獻[16]中的雙高斯改進AFSA進行對比發現,本文算法雖然經過簡化,但精度依然很高,平均迭代次數與文獻[16]中的結果相近,且對于測試函數1,本文算法平均迭代次數明顯小于文獻中的結果。
3 最優加速控制計劃的獲取
以槳扇發動機在飛行高度=0 km時的加速工作狀態為例,對于其他工作點,只需在模型中修改相應高度、馬赫數的數值即可。在加速時,飛行員通過推油門桿來設定目標推力值,選取發動機的一種典型工作狀態:從巡航狀態(推力為最大推力的60%)加速到最大推力狀態(100%推力)的場景進行優化。分別運用改進的AFSA和SQP算法對該過程的加速控制計劃進行優化,得到在加速過程中的推力、各控制量和典型參數隨時間的變化,如圖3~6所示。
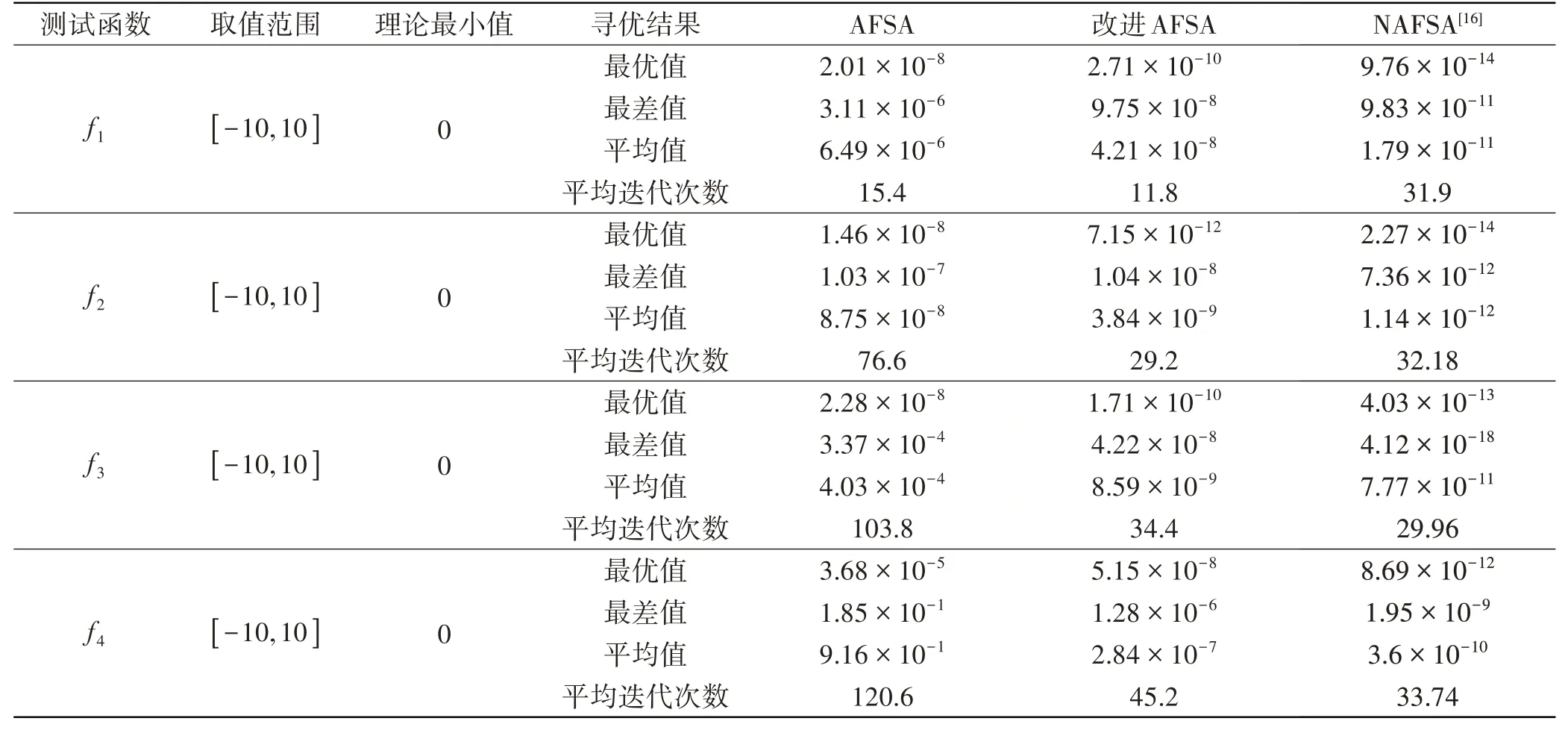
表2 改進AFSA和AFSA、NAFSA[16]的尋優結果對比
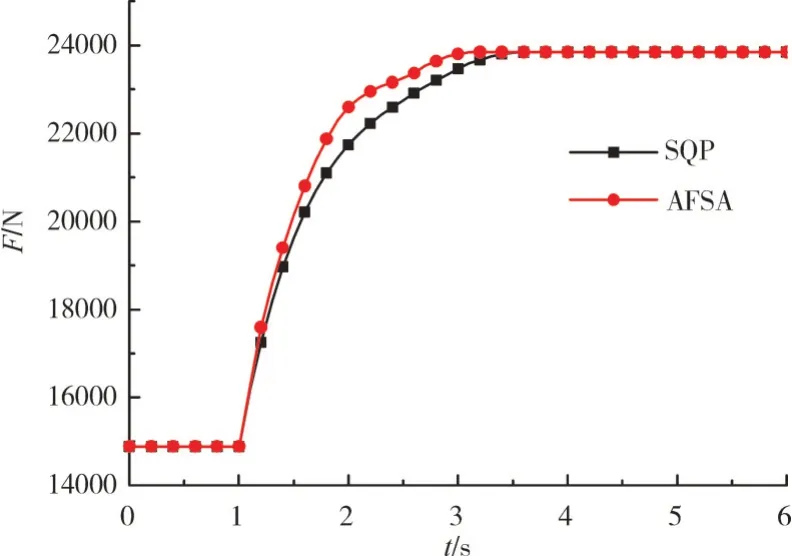
圖3 在加速過程中推力隨時間的變化
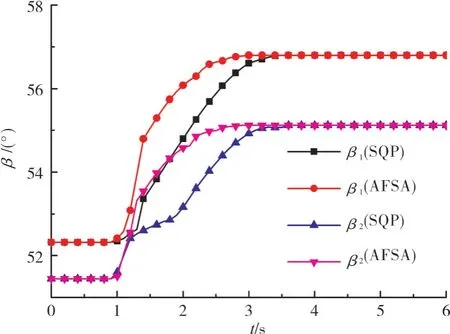
圖4 在加速過程中槳距角隨時間的變化
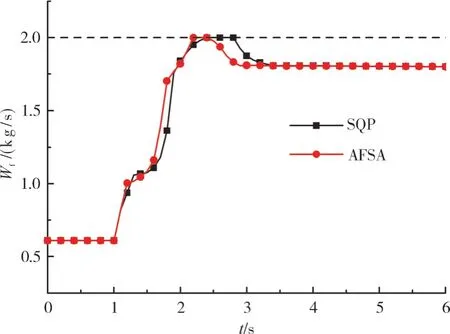
圖5 在加速過程中供油量隨時間的變化
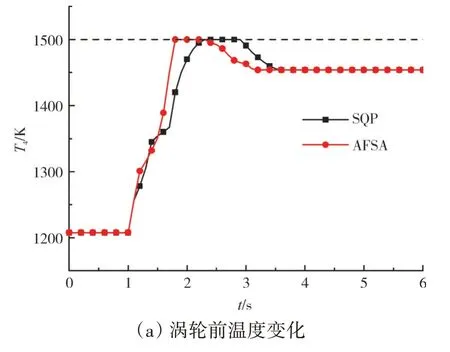
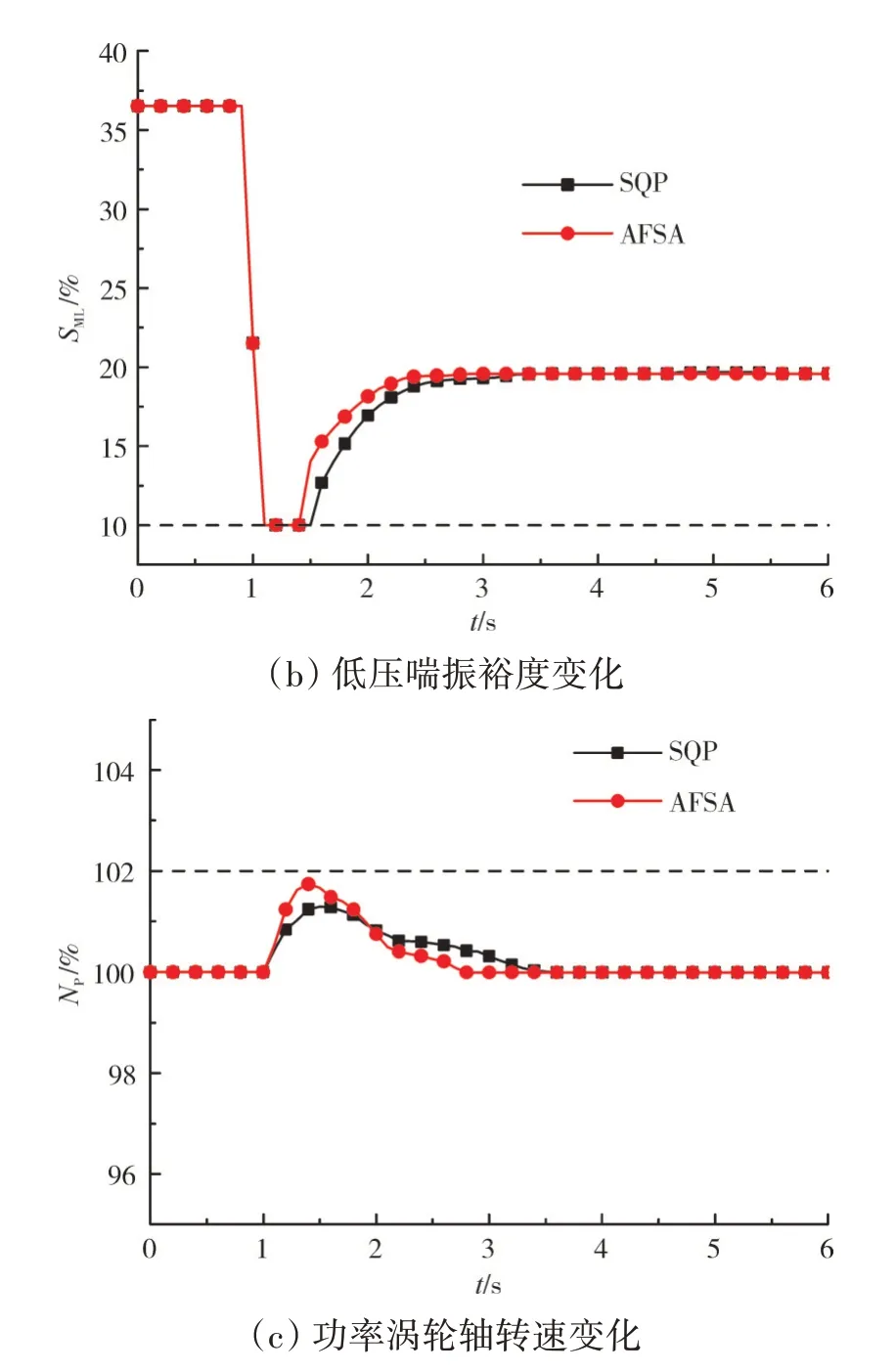
圖6 在加速過程中典型參數隨時間的變化
從圖中可見,改進AFSA和SQP 2種算法均可保證優化后的控制計劃在整個調節范圍內滿足約束要求。
將2種算法得到的槳扇發動機時間最優加速過程總時長和尋優程序總計算時間進行對比,結果見表3。

表3 算法效率對比 s
從表中可見,改進AFSA計算出的時間最優加速控制計劃的加速時間比SQP的結果縮短21.8%(0.58 s),說明改進AFSA的全局尋優能力更強,在尋優時可以更加精確地搜索到每個步長中滿足約束要求的最大推力;但SQP算法在計算代數更多的前提下,總計算時間仍然短于改進AFSA算法,說明在計算速度上,基于梯度的數學基礎更嚴密的SQP算法更勝一籌。
4 結論
通過引入自適應調節策略和半可行域對AFSA算法進行改進,提高了收斂速度和尋優精度,實現了對帶約束優化問題的求解。
將改進AFSA算法應用于具有多個可調變量的槳扇發動機加速計劃優化中,得到的控制計劃加速時間比SQP算法的縮短21.8%(0.58 s),證明了該算法具有更強的全局尋優能力。
綜上所述可知,改進AFSA算法具有優秀的非線性全局尋優能力,適用于槳扇發動機過渡態加速計劃的優化。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代企業(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15