柔性充氣空間飛行器姿態控制系統設計
2022-07-05 01:06:22趙春明焦勝海王曉飛姚躍民黃朝東
兵工學報 2022年6期
趙春明,焦勝海,王曉飛,姚躍民,黃朝東
(北京航天長征飛行器研究所,北京 100076)
0 引言
空間充氣展開結構是一種采用輕質高強度柔性薄膜材料,發射時為折疊狀態、到達預定軌道充氣展開的新型空間結構。空間充氣展開結構占用空間小、質量輕、成本低,在航天器上的使用越來越廣泛,具有很大的發展潛力。典型應用如導彈充氣誘餌、充氣太空艙、充氣式增阻離軌裝置、充氣天線、充氣太陽能電池陣、空間充氣遮光罩、衛星充氣重力梯度桿、氣球衛星等。
作為空間飛行器的承力或功能結構的新形式,柔性充氣結構的發展和應用涉及到柔性氣囊材料技術、充氣結構折疊和展開技術、柔性充氣結構數值模擬及仿真技術,以及柔性充氣結構的動力學建模與控制等關鍵技術。文獻[8-9]對充氣結構的展開過程進行了數值仿真分析,得到了氣囊展開過程的規律及影響因素。文獻[10]主要針對航天器充氣增阻球離軌應用,進行極薄充氣增阻球的形狀穩定性分析及驗證,并提出了若干種薄膜球體形狀穩定性增強方案。關于充氣柔性飛行器控制的文獻較少,文獻[11]針對氣球衛星進行研究,對氣球衛星進行總體設計,并就展開狀態進行了模態分析,僅簡單描述采用重力梯度桿和磁力矩器進行姿態控制。文獻[12]針對球錐外形的柔性充氣囊體結構進行靜力和動力學響應分析,并研究了自由飛行狀態下控制力作用引起的充氣囊體姿態動力學特性,發現控制力產生的彈性變形對充氣囊體的姿態動力學影響較大,姿態分析中的充氣囊體不能等效為剛體。
充氣結構雖然采用了增強、硬化等技術提高結構剛度,但與傳統剛性結構相比,充氣結構不可避免地會存在低頻柔性振動,傳統剛性飛行器的控制算法可能不適用于柔性充氣結構,真正實現帶有柔性充氣結構的空間飛行器精確控制,需要關注剛柔耦合問題。關于柔性充氣結構飛行器的姿態控制文獻較少,更多的是關于以太陽帆板為代表的帶有撓性附件飛行器的控制研究。文獻[13]提出采用自適應魯棒輸出反饋控制器實現高精度姿態控制,并用線性二次型調節器抑制彈性振動。文獻[14]提出采用輸入成型技術、自適應擾動觀測器,以及多變量有限時間控制器相結合的控制策略,達到彈性振動抑制、高精度姿態跟蹤的目的。文獻[15]通過機動路徑規劃、模態估計及動力學補償等技術,實現撓性飛行器姿態控制性能和對擾動的持續抑制。文獻[16-17]采用滑模控制進行剛柔耦合姿態控制并抑制彈性振動。文獻[18]引入角加速度測量并基于動態面方法進行了姿態控制設計。上述文獻中的方法對柔性充氣飛行器的研究有一定參考價值,但工程實現相對復雜。
本文以文獻[7,11]所示中心剛體加充氣囊體結構的具備大角度機動柔性充氣空間飛行器為應用對象,對其展開后的姿態控制問題進行研究。充氣飛行器采用捷聯慣性測量組合(簡稱慣組)確定飛行姿態,以姿態控制發動機作為執行機構,慣組和執行機構安裝到中心剛體上。通過基于自抗擾控制理論的姿態控制系統設計方法,實現了充氣空間飛行器剛柔耦合影響下的高精度姿態控制。
1 剛柔耦合動力學建模
建立精確的耦合動力學模型是進行控制的基礎,基于混合坐標系法和拉格朗日法,可得到如下運動學和動力學模型。
1) 運動學模型
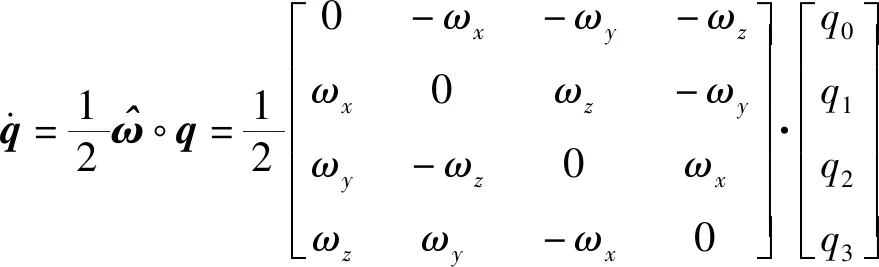
(1)

2) 動力學模型


(2)
式中:為整個飛行器的慣性張量矩陣,
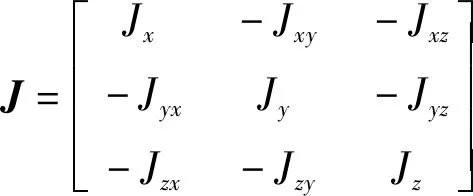
(3)

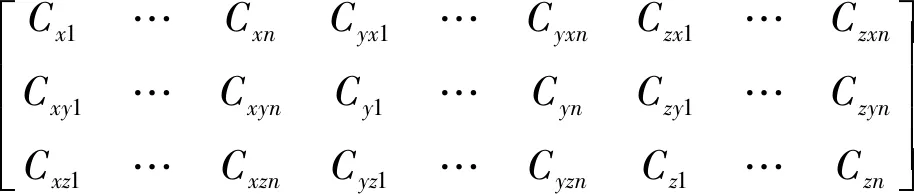
(4)
、、分別為滾轉柔性振動對剛體滾轉、偏航、俯仰運動的耦合系數,為振動模態階數,、、分別為偏航柔性振動對剛體偏航、滾轉、俯仰運動的耦合系數,、、分別為俯仰柔性振動對剛體俯仰、滾轉、偏航運動的耦合系數;為充氣囊體的振動模態廣義坐標矢量,

(5)
、、分別為滾轉、偏航、俯仰三通道振動模態坐標;為控制力矩,

(6)
、、分別為滾轉、偏航、俯仰三通道控制力矩;為外部干擾力矩,

(7)

=diag(1,…,,1,…,,1,…,)
(8)

(9)

從(2)式可以看出,柔性飛行器的姿態動力學方程和結構動力學方程是相互耦合的,姿態角加速度會激發柔性囊體振動,而柔性振動又會通過模態角加速度影響飛行器姿態。
2 姿態控制設計
2.1 PID控制

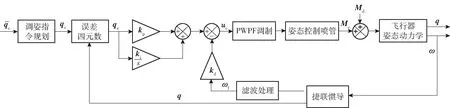
圖1 基于PID控制的姿態控制系統方案Fig.1 Attitude control system scheme based on PID control
(10)
式中:(,,)為滾轉、偏航和俯仰通道連續控制量;(f,f,f)為慣組輸出濾波處理后的角速度;(,,,)為誤差四元數;(p,i,d)為滾轉控制參數,(p,i,d)為偏航控制參數,(p,i,d)為俯仰控制參數,相關控制參數通過相平面法得到。
2.2 自抗擾控制
自抗擾控制方法是在PID控制基礎上發展起來的一種新型非線性控制方法,其核心是把所有的非線性、時變、大時滯等影響都當做干擾來處理,通過擴張狀態觀測器對干擾進行估計,并在控制器中進行補償,不依賴于被控對象的精確模型,抗干擾能力強,可用于多種線性或非線性系統。目前,線性自抗擾利用帶寬概念確定控制參數,使得整個系統易于調試和實際應用,也便于利用頻域方法進行穩定性分析,成為發展和應用最快的方向。本文采用線性自抗擾理論進行控制器設計,將充氣囊體的柔性振動及其他干擾通過2階線性擴張狀態觀測器進行估計并實時補償,從而實現高精度控制。
由(2)式可得

(11)

(12)
式中:表示輸出向量。
設計2階狀態觀測器:
(13)
式中:為的估計值;為的估計值;、為觀測器參數。


(14)

根據上述分析,設計控制方案如圖2所示,圖2中,為觀測器輸出的補償量,為控制參數。
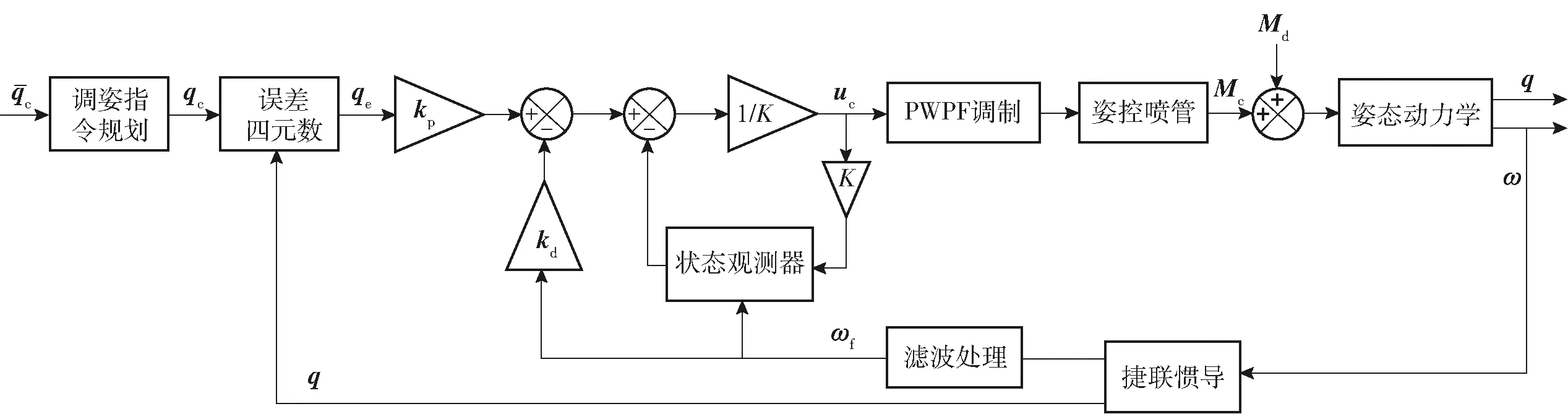
圖2 基于自抗擾控制的姿控系統方案Fig.2 Attitude control system scheme based on active disturbance rejection control
從而得到三通道控制方程如下:
(15)
(16)
(17)
式中:(,,)為滾轉、偏航和俯仰三通道連續控制量;(,,)為滾轉、偏航和俯仰三通道控制參數;(0,0,0)分別為滾轉、偏航、俯仰三通道狀態觀測器參數;1,、1,、1,、2,、2,、2,分別為滾轉、偏航、俯仰三通道狀態觀測器狀態量的當前拍值;1,-1、1,-1、1,-1、2,-1、2,-1、2,-1分別為滾轉、偏航、俯仰三通道狀態觀測器狀態量的上一拍值;c為控制計算周期。
對于(15)式~(17)式,在頻域上基于幅值和相位穩定裕度進行控制參數整定,從而可以保證控制回路的穩定性。
2.3 姿態機動路徑規劃

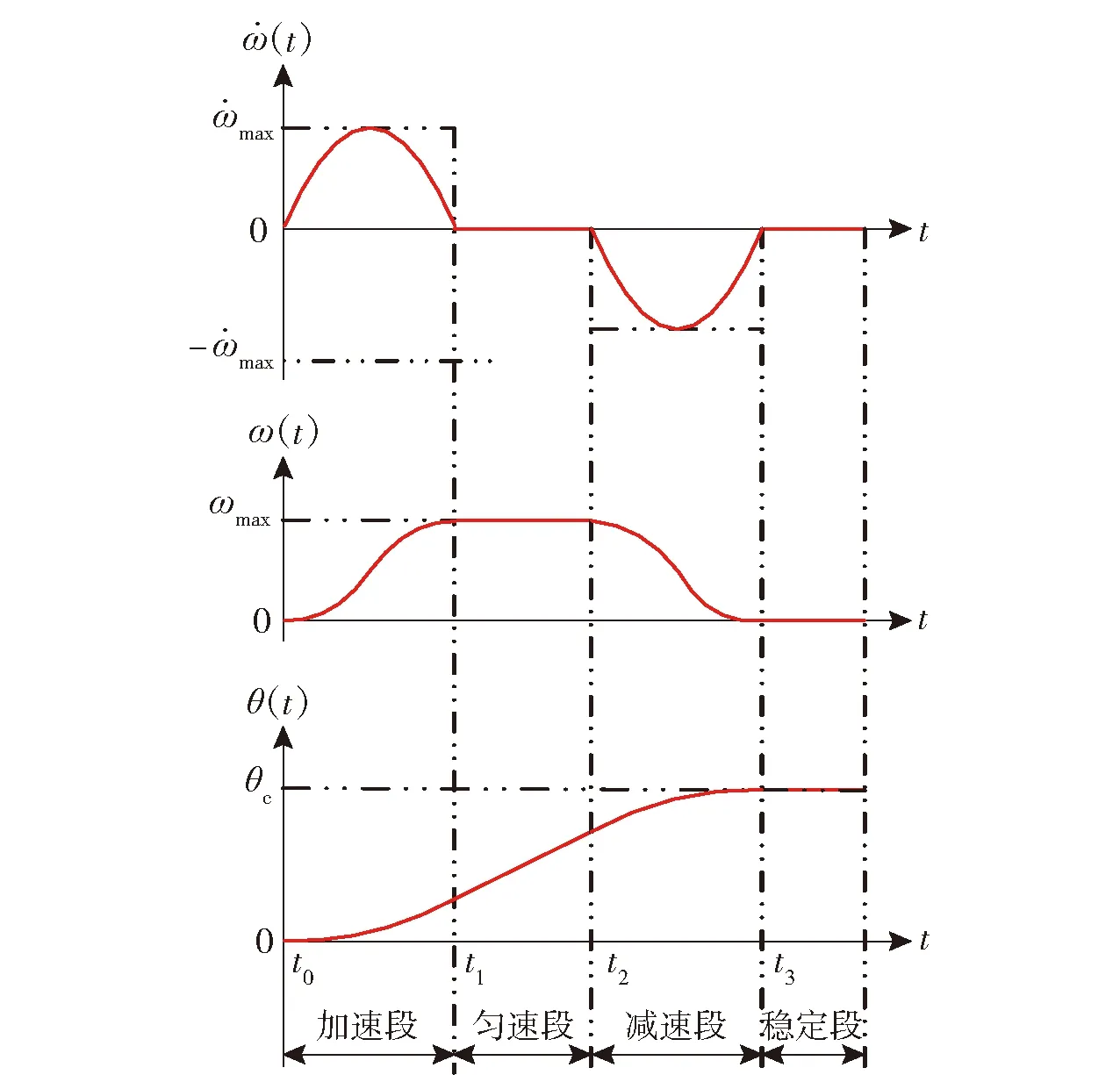
圖3 姿態機動路徑規劃示意圖Fig.3 Schematic diagram of attitude maneuver path planning
(18)
具體調姿實現時的當前時刻旋轉角度指令通過(19)式得到:
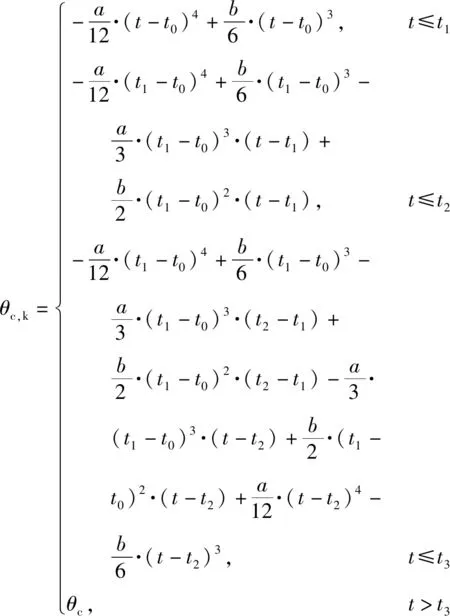
(19)
式中:
(20)
2.4 PWPF調制
對于采用姿態控制發動機進行反作用控制的空間飛行器,PWPF擁有接近線性的占空比,能夠降低燃料消耗,具有很大優勢。如圖4所示,PWPF調制器由1階慣性環節和施密特觸發器構成,具體通過(21)式將連續控制指令離散化為發動機的開關指令。圖4中,、分別為調制器的輸入和輸出,、為慣性環節參數,()為慣性環節輸出,為輸出幅值,、為觸發器開關門限。
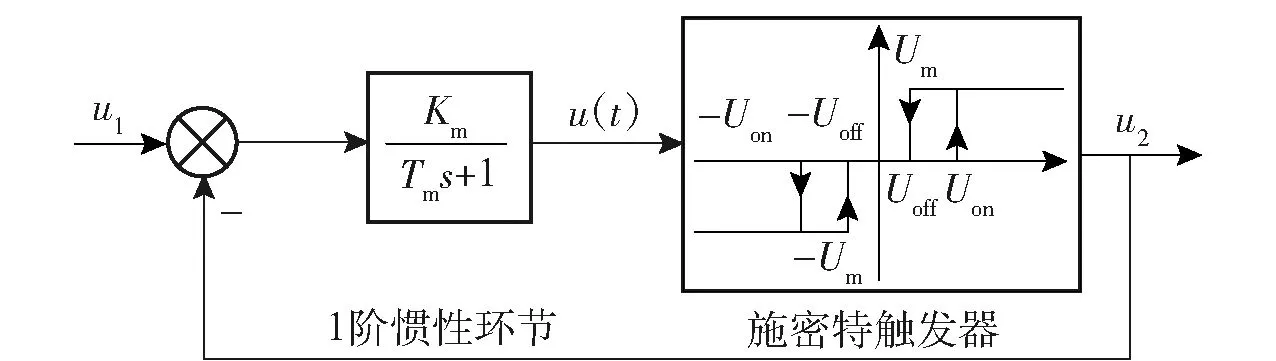
圖4 PWPF調制器Fig.4 PWPF modulator

(21)
(22)
式中:為調制周期;1,、2,分別為PWPF的輸入和輸出,=,,;,-1為,的前一拍值;2,-1為2,的前一拍值。
2.5 濾波處理
狀態觀測器帶寬有限,通常只能補償中低頻干擾,此處濾波器的引入主要用來濾除姿控系統可能存在的高頻噪聲及干擾,適當降低剛柔耦合影響,提高系統抗干擾能力。本文采用工程上常用的2階低通濾波器,具體實現如下:
(23)
式中:、、、、為濾波器系數;_1和_2表示角速度(=、、)的上拍值和上上拍值,f-1和f-2表示f的上拍值和上上拍值。
3 仿真驗證
為校驗本文姿態控制設計的有效性,搭建姿態控制系統仿真模型,進行姿態控制系統數學仿真驗證,PWPF調制周期10 ms。


(24)
仿真中設計的控制參數如表1~表3所示,按時間設置表4所示的姿態機動序列,且在全程考慮(25)式所示的空間干擾力矩。
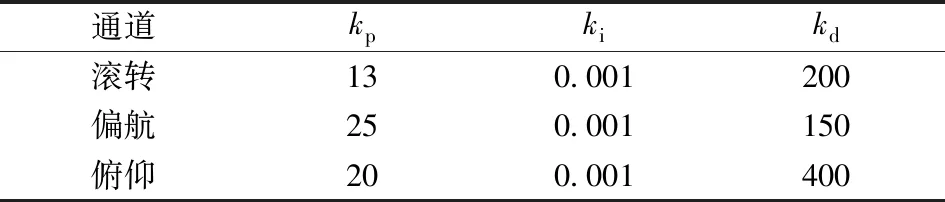
表1 PID控制器參數Tab.1 Parameters of PID controller
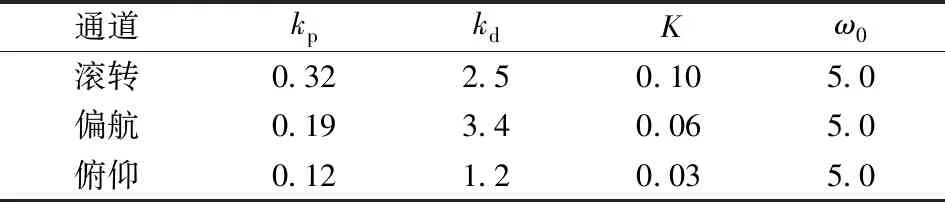
表2 自抗擾控制器參數Tab.2 Parameters of ADRC controller
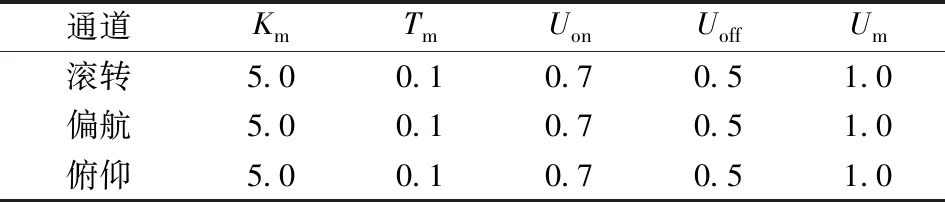
表3 PWPF調制器參數Tab.3 Parameters of PWPF controller
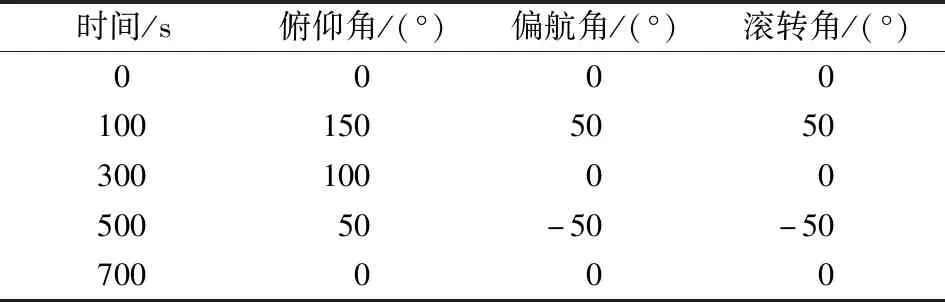
表4 姿態機動序列Tab.4 Attitude maneuver sequence
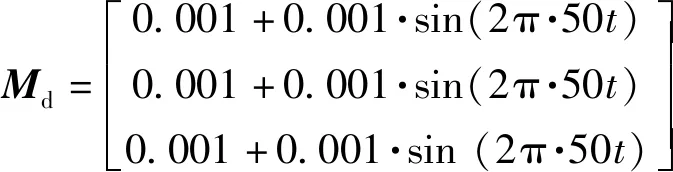
(25)

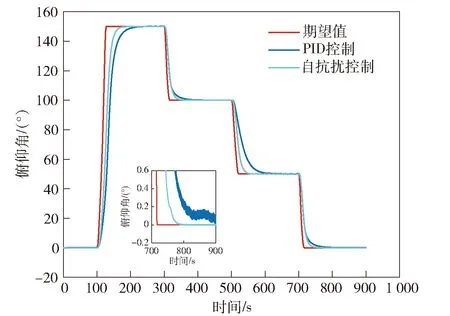
圖5 俯仰角響應對比Fig.5 Responses of PID and ADRC controllers to pitch angle
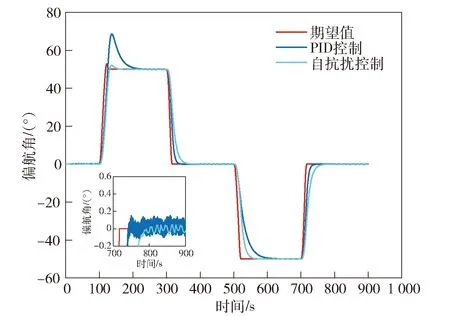
圖6 偏航角響應對比Fig.6 Responses of PID and ADRC controllers to yaw angle
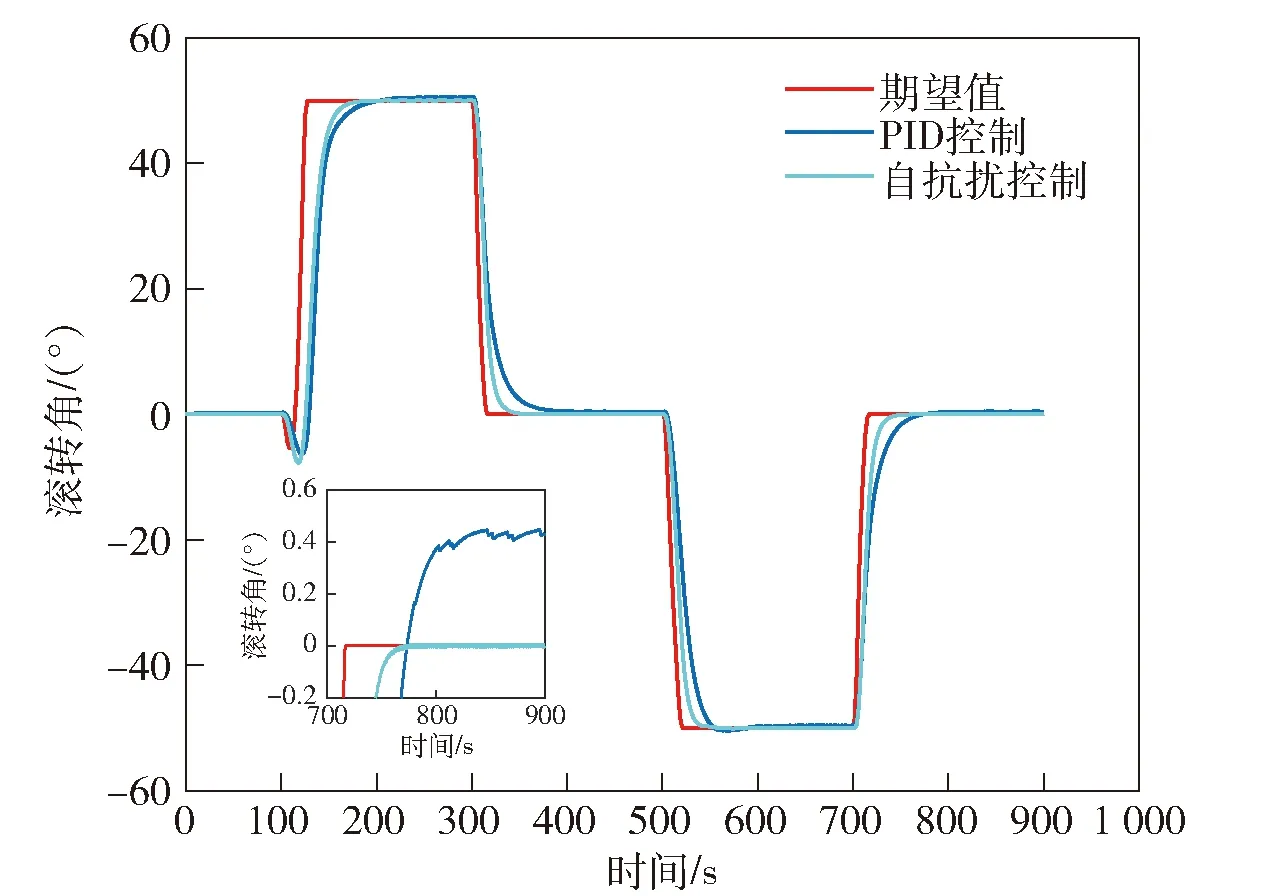
圖7 滾轉角響應對比Fig.7 Responses of PID and ADRC controllers to roll angle
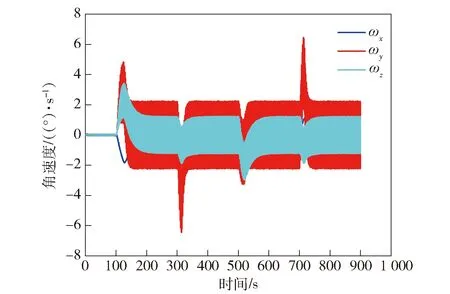
圖8 角速度響應(PID)Fig.8 Response of angular velocity in PID
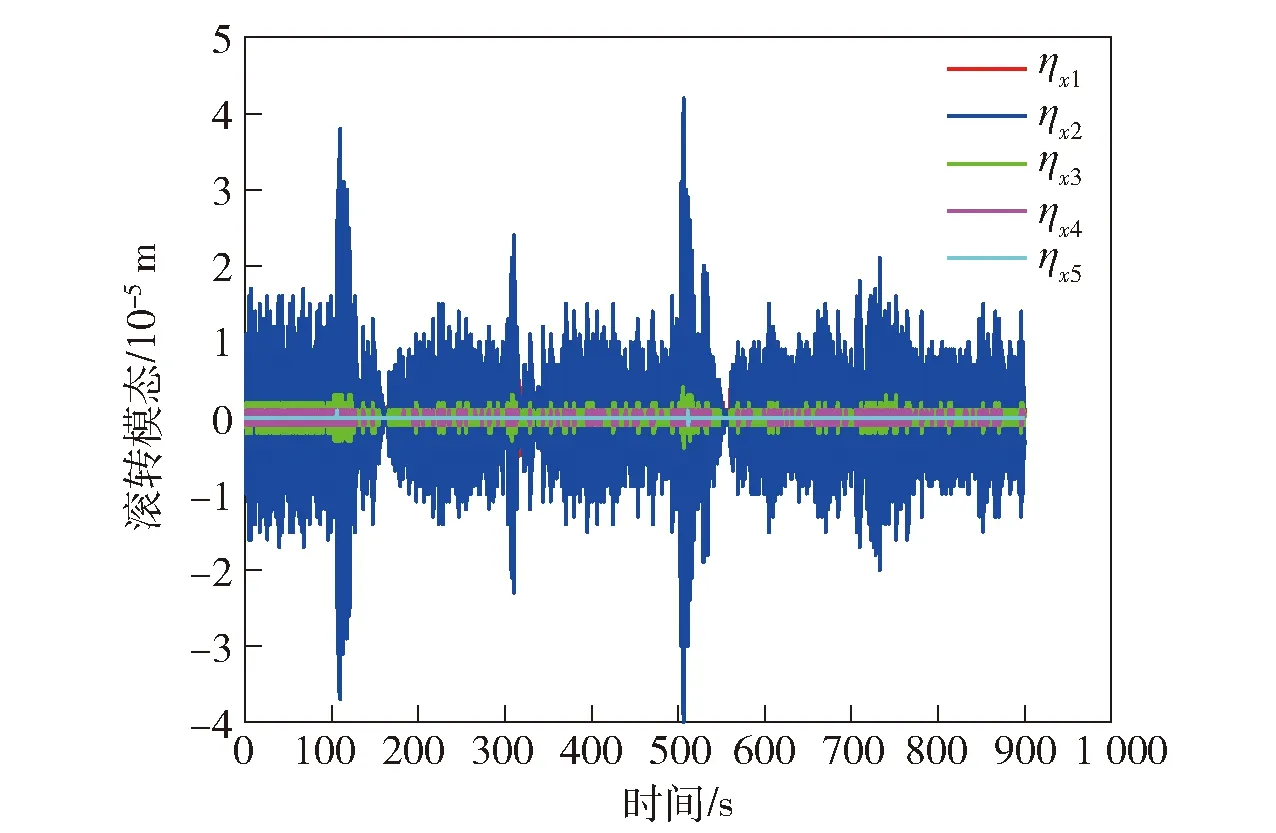
圖9 滾轉通道振動模態變化(PID)Fig.9 Flexible modes of roll channel in PID

圖10 偏航通道振動模態變化(PID)Fig.10 Flexible modes of yaw channel in PID
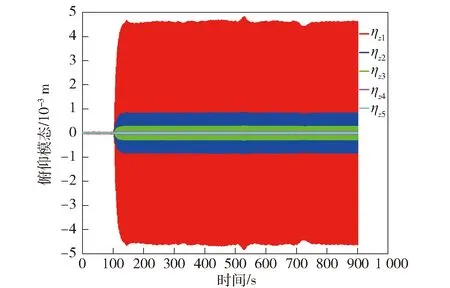
圖11 俯仰通道振動模態變化(PID)Fig.11 Flexible modes of pitch channel in PID
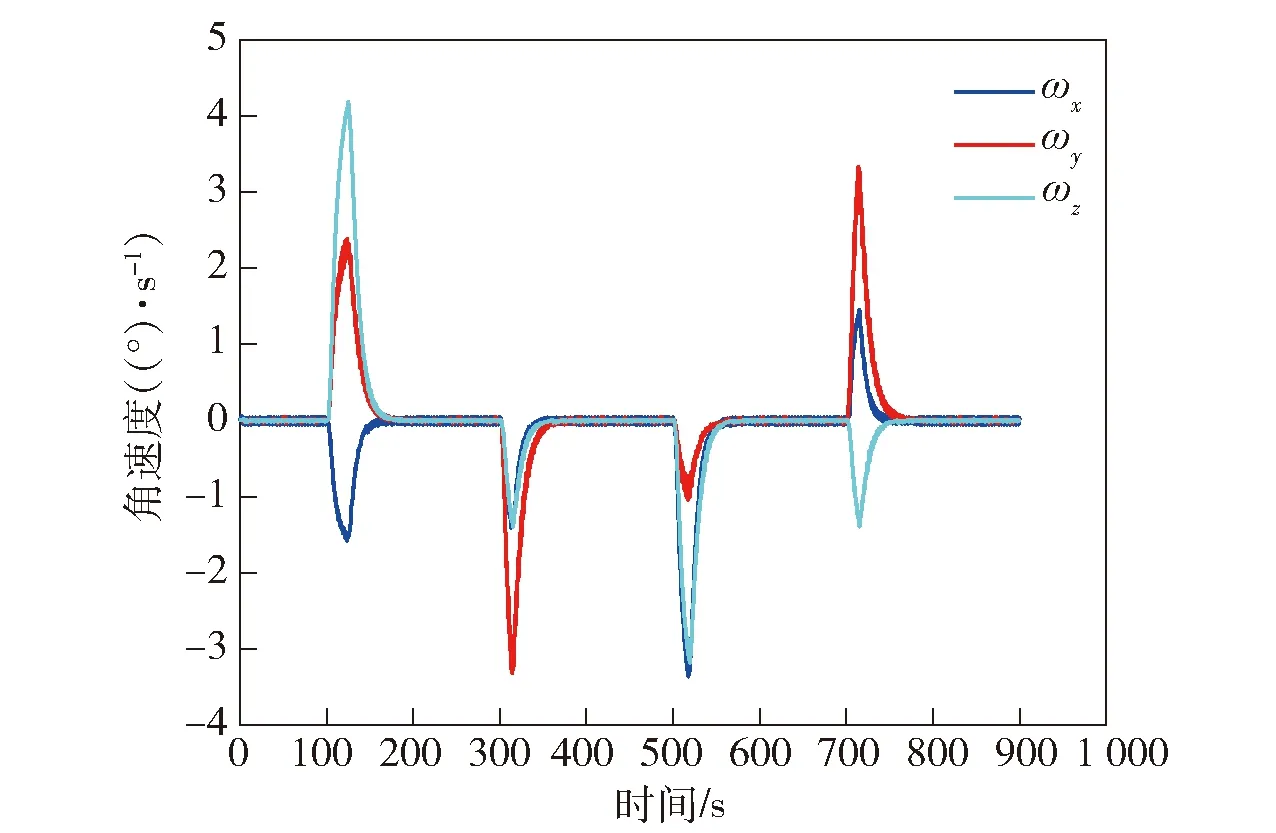
圖12 角速度響應(自抗擾控制)Fig.12 Response of angular velocity in ADRC
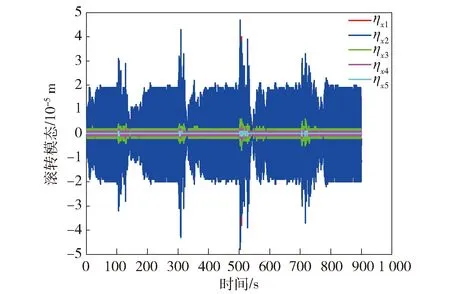
圖13 滾轉通道振動模態變化(自抗擾控制)Fig.13 Flexible modes of roll channel in ADRC
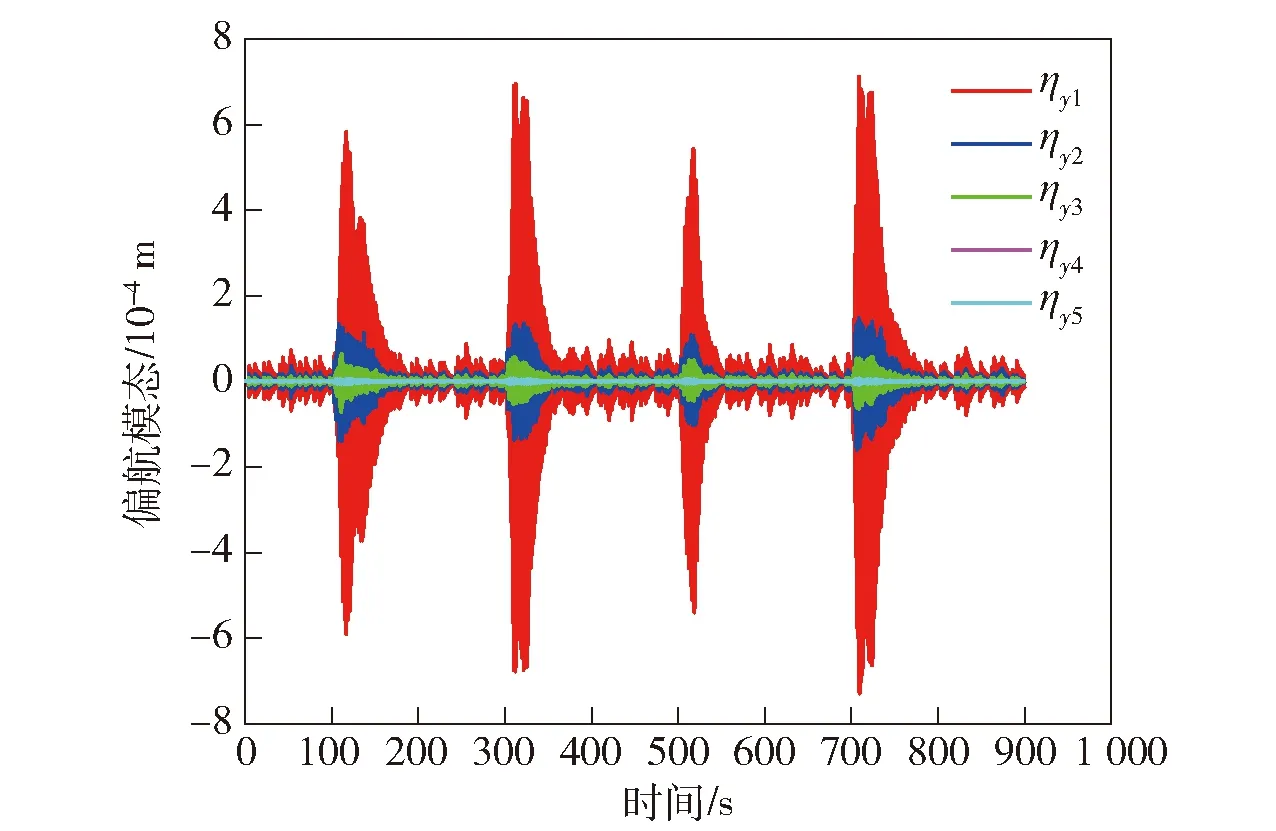
圖14 偏航通道振動模態變化(自抗擾控制)Fig.14 Flexible modes of yaw channel in ADRC
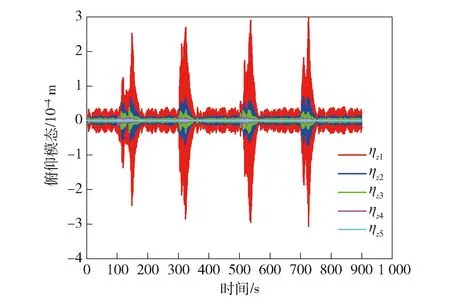
圖15 俯仰通道振動模態變化(自抗擾控制)Fig.15 Flexible modes of pitch channel in ADRC
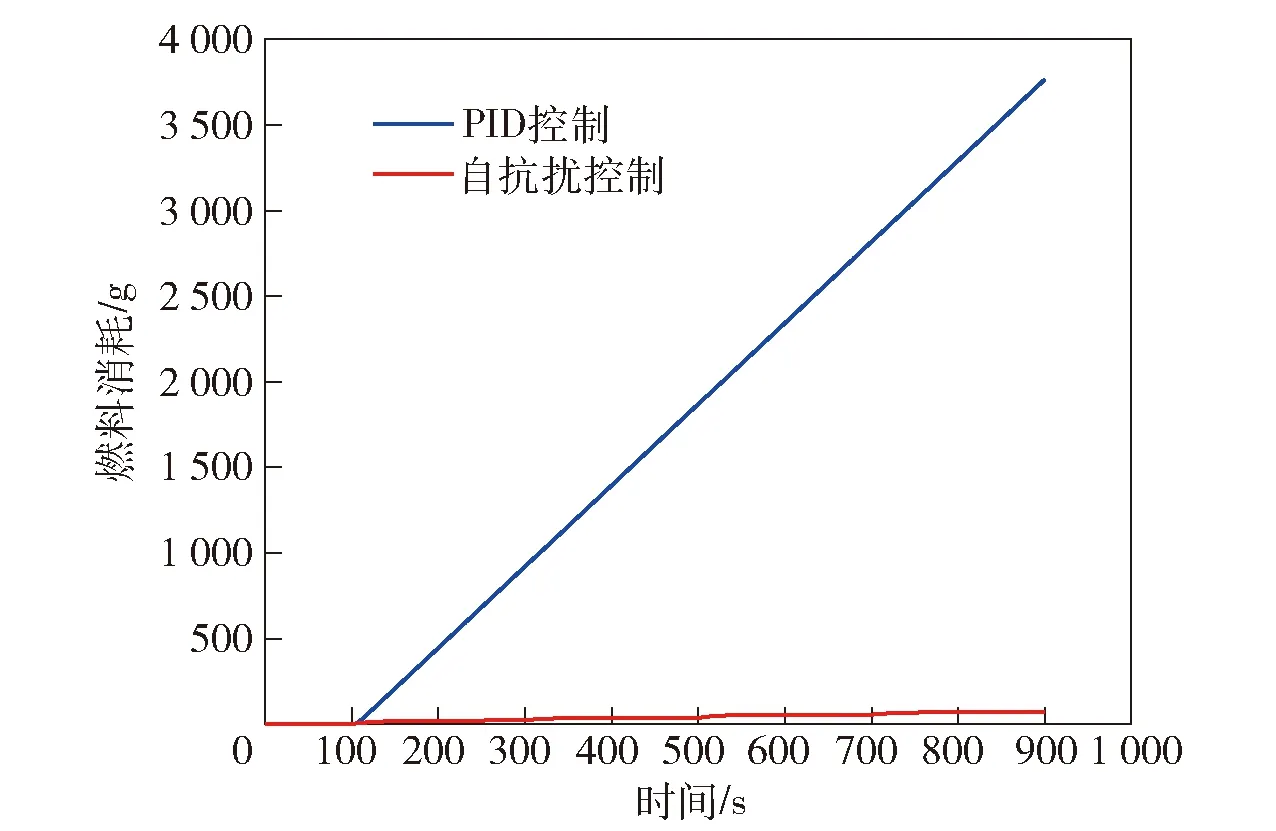
圖16 燃料消耗對比Fig.16 Fuel consumption
4 結論
本文建立了充氣空間飛行器剛柔耦合動力學模型,基于自抗擾控制理論,綜合采用自抗擾控制、姿態機動路徑規劃、PWPF調制、濾波處理等控制策略進行剛柔耦合抑制,并進行了姿控系統仿真驗證及與傳統PID控制的對比。得出主要結論如下:
1) 本文設計的柔性充氣空間飛行器姿態控制系統,能夠有效抑制充氣囊體的柔性振動,可在節省燃料消耗的同時實現高精度姿態控制。
2) 與傳統PID控制相比,本文所用設計方法在剛柔耦合抑制、干擾抑制方面有更好的魯棒性,精度更高。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
