超大城市試驗氣溶膠激光雷達標定及結果分析
2022-07-11 02:43:12陳玉寶王簫鵬步志超王一萌郭澤勇
激光技術 2022年4期
關鍵詞:信號
陳玉寶,王簫鵬,步志超,王一萌,郭澤勇,熊 峰,王 宣
(1.中國氣象局 氣象探測中心,北京 100081;2.陽江市氣象局,陽江 529500; 3.黑龍江省氣象數據中心,哈爾濱 150030;4.武漢大學 遙感信息工程學院,武漢 430072)
引 言
氣溶膠激光雷達(light detection and ranging,LiDAR)是進行大氣氣溶膠3維立體觀測的重要遙感設備之一,其探測數據具有高精度和高時空分辨率的特點[1-4],可用于大氣霧霾的監測、數值模式同化預報和衛星傳感器的地面標定[5-7]。氣溶膠激光雷達數據應用的效果取決于其探測精度[8-10]。對于探測大氣風場、溫度、水汽和臭氧含量等大氣廓線參數的激光雷達來說,可以與使用氣球或者無人機攜帶的觀測設備得到的數據來進行比較,判斷其探測數據的精度[11-12];但是對于氣溶膠激光雷達來說,就要復雜很多,與地基的濁度計和太陽光度計等觀測設備進行對比,都存在著波長不一致、探測體積不相同等多種困難[13]。因此,通過多部氣溶膠激光雷達的相互比對,并使用統計分析的方法來對雷達進行標定是一種可行的方法[14]。
歐洲氣溶膠激光雷達網(European Aerosol Research LiDAR Network,EARLINET)建立于2000年[15],初始階段包括來自11個國家的19部氣溶膠激光雷達,到2016年,該雷達網網羅了來自16個國家的35部氣溶膠激光雷達。為了能夠提供高精度連續觀測的氣溶膠廓線數據,EARLINET一直通過網內激光雷達的比對觀測,基于統計分析的方法來對雷達進行標定。2001年~2002年,EARLINET對19部氣溶膠激光雷達進行了標定,標定完成后,所有雷達的數據質量得到了保證,氣溶膠后向散射系數廓線在邊界層中的相對標準差小于10%,在自由對流層中的標準差不大于0.1×10-3km-1·sr-1。隨著激光雷達技術的發展,越來越多的氣溶膠激光雷達加入到該網中[16-17],2009年~2013年,EARLINET網內的氣溶膠激光雷達的比對標定每年定期舉行,期間對21部網內雷達再次進行了標定,數據質量得到了進一步提高,在特定高度范圍內,回波信號的相對標準差小于2%,計算得到的粒子的后向散射系數和消光系數的變化范圍分別小于2×10-4km-1·sr-1和0.01km-1[18-20]。在國內,主要是通過太陽光度計、大氣成分觀測設備對氣溶膠激光雷達的探測精度進行比對分析[21-25],本文中在國內首次通過多臺激光雷達的比對觀測來對雷達進行標定,并取得了不錯的結果,標定之后的氣溶膠激光雷達在北京的5個觀測站進行了布點觀測,為超大城市氣象觀測試驗提供觀測數據。
1 研究背景
為了揭示城市熱島、地表粗糙度差異和大氣污染等對城市氣象和環境的影響,2016年,中國氣象局發起了超大城市綜合氣象觀測試驗,通過多種地基觀測設備,實現城市區域風、溫、濕、水凝物、氣溶膠等“五條廓線”的連續觀測,從而揭示超大城市氣象條件與大氣邊界層的結構特征及城市熱島效應、下墊面差異和氣溶膠分布等對其影響機理。為了確保試驗中組網氣溶膠激光雷達探測的大氣氣溶膠特征參數廓線定量可比,項目組在北京南郊觀象臺開展了氣溶膠激光雷達的標定。
2017年9月,6臺氣溶膠激光雷達在南郊開展了第1次標定工作,標定完成后在北京市的5個站點布點觀測。本次試驗中的氣溶膠激光雷達的標定包括單部雷達關鍵參數的標定和多部雷達的集中比對觀測標定2個階段:第1個階段的標定主要包括對激光雷達的望遠鏡對中、模數(analog to digital,AD)采集卡底噪、接收信號飽和度、收發光軸的一致性、激光雷達的瑞利散射信號等幾個方面進行檢查標定;第2個階段是在南郊觀象臺開展雷達集中比對觀測,主要是對多臺激光雷達同址同時刻探測的大氣邊界層氣溶膠信號的一致性進行檢查標定。
項目組有2種方式開展比對觀測:(1)研制標準的氣溶膠激光雷達,并在歐洲和EARLINET的雷達開展比對觀測標定,主要參數達標后,作為量值傳遞的標準源,對國內參加試驗的雷達進行標定,目前標準氣溶膠激光雷達正在研制中;(2)采用統計分析的方法,當參加比對觀測標定的激光雷達的某個波長接收通道的數量大于5個時,可以開展標定,出現概率高的結果被認為是正確的結果。
2 比對觀測標定的接收通道及數據質量控制方法介紹
由于標準激光雷達尚未研制完成,因此采用統計分析的方法對氣溶膠激光雷達進行比對觀測標定。參加標定的6臺激光雷達都有532nm米散射接收通道,可以通過標定得到較為準確的信號,3臺雷達有355nm米散射接收通道,1臺雷達有1064nm米散射接收通道,較難實現較為準確的標定。參考歐洲EARLINET激光雷達標定后的精度以及我國目前激光雷達標定處于起步階段的現狀,確定本次標定的主要參數目標,如表1所示。
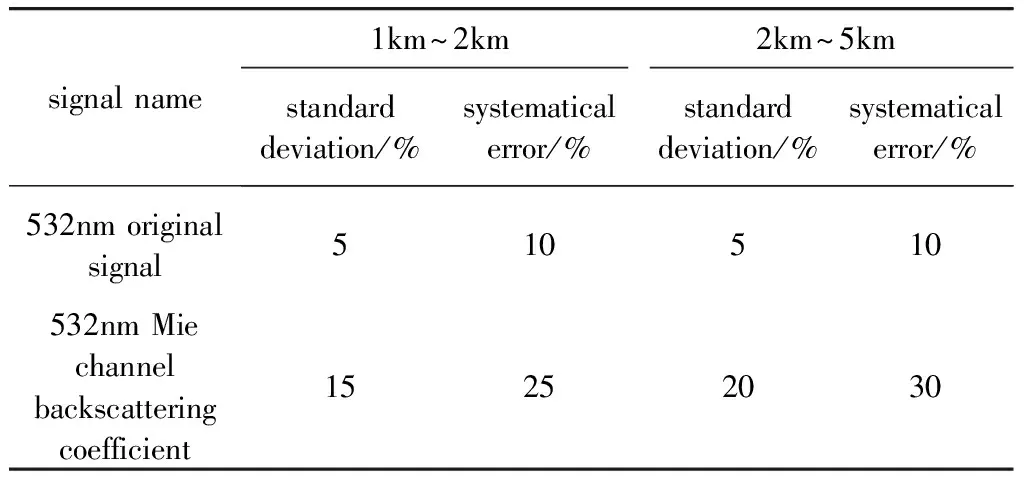
Table 1 Main parameter targets of aerosol LiDAR calibration (10min cumulative data)
對于參加試驗的氣溶膠激光雷達的各種參數的標定,采用統一的方法來計算其誤差,主要為系統差和標準差。
假設第1部雷達在距離r1,r2,rk,…,rn處的測量值為x11,x12,x1k,…,x1n;第2部雷達在距離r1,r2,rk,…,rn處的測量值為x21,x22,x2k,…,x2n;第i部雷達在距離r1,r2,rk,…,rn處的測量值為xi1,xi2,xik,…,xin。假設共有m臺雷達,則所有m臺雷達在r1,r2,rk,…,rn處測量值的平均值為y1,y2,yk,…,yn,其中:
(1)
式中,k表示距離雷達r1,r2,…,rn處的點。每個雷達的系統差的計算方法如下:

(2)
式中,i表示第i部雷達。相對系統差的計算方法如下:

(3)

標準差的計算方法如下:
(4)
相對標準差的計算方法如下:

(5)
3 氣溶膠激光雷達標定過程及結果分析
第一批次氣溶膠激光雷達的標定在2017年9月開展,參加標定的6臺雷達中,任意兩臺雷達之間的距離不大于100m,為了方便比對過程說明,對6臺雷達分別命名為101、102、103、104、105和106。
3.1 標定前氣溶膠激光雷達探測數據分析
2017-09-08對參加聯合比對觀測標定的氣溶膠激光雷達的信號進行了首次對比分析,取22:00~22:10累加的532nm米散射通道的信號歸一化處理,距離平方校正后,進行對比,如圖1所示。可以看出,104號雷達曲線和106號雷達曲線,與計算得到的大氣分子線擬合較差,存在明顯的問題。因此,對其余4臺雷達的信號進行對比顯示,并與分子線擬合,可以看出,由于參加標定的雷達的overlap區在0km~1km范圍,因此對1km~5km的信號分段進行統計分析,如表2所示。可以看到,1km~2km高度范圍內最大的相對標準差達到了90.8%,2km~5km最大相對標準差為58.8%。
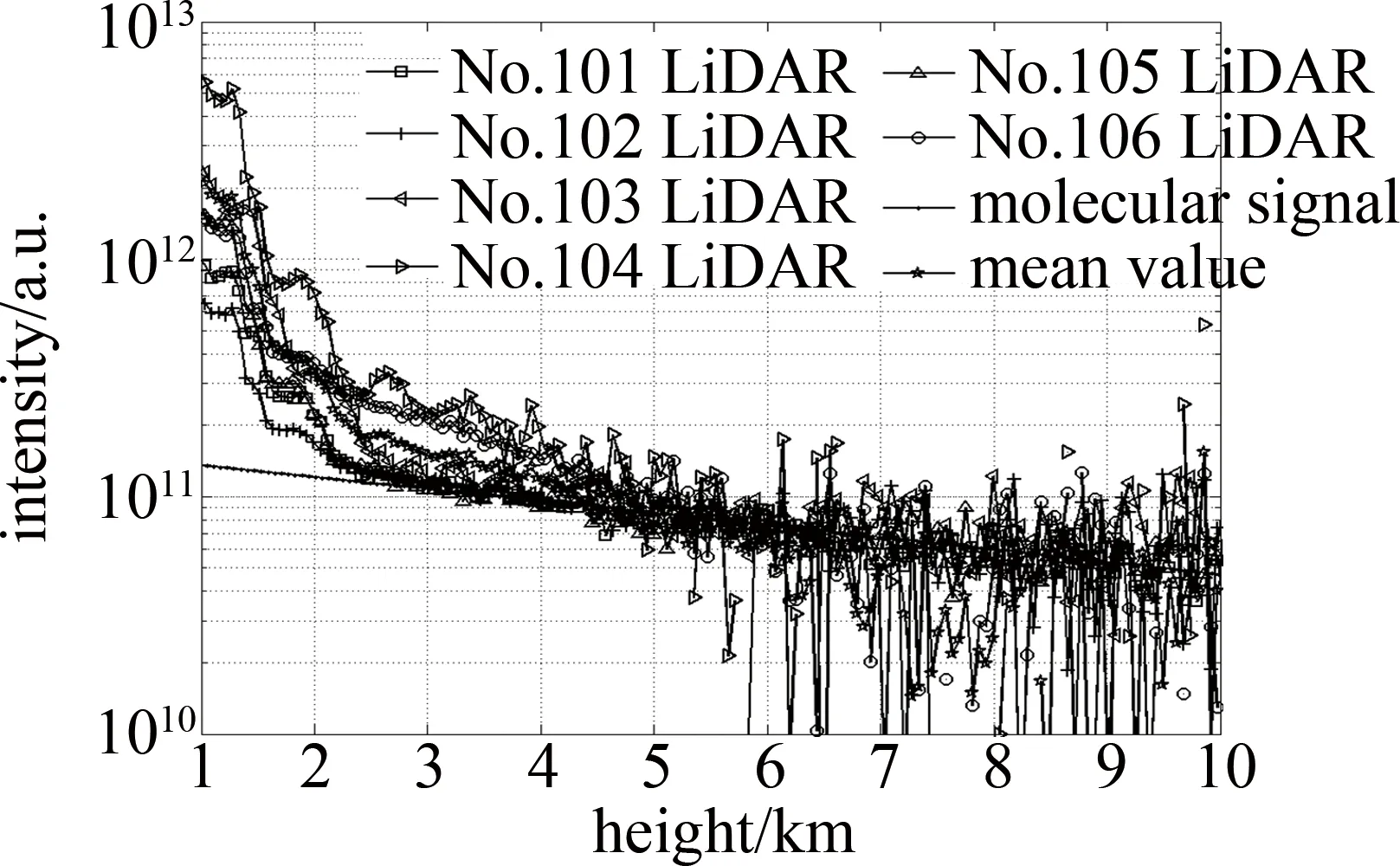
Fig.1 Comparison and analysis of range square correction signals of 532nm Mie scattering channel for 6 LiDARs from 2017-09-08T22:00 to 2017-09-08T22:10(10min accumulation)
4臺雷達的探測數據反演得到后向散射系數廓線,其對比圖如圖2所示。對結果進行分析如表2所示。可以看到,1km~2km高度范圍內最大的相對標準差達到了80.3%,2km~5km最大相對標準差為244.3%。分別對雷達在上述2個高度范圍內的后向散射系數進行積分,在1km~2km高度范圍內,其積分值的變化范圍為5.9×10-5~2.2×10-4,變化范圍約為最小積分值的272.9%,在2km~5km高度范圍內,其積分值的變化范圍為6.6×10-6~3.5×10-5,變化范圍約為4個雷達在此高度范圍內最小積分值的430.3%。
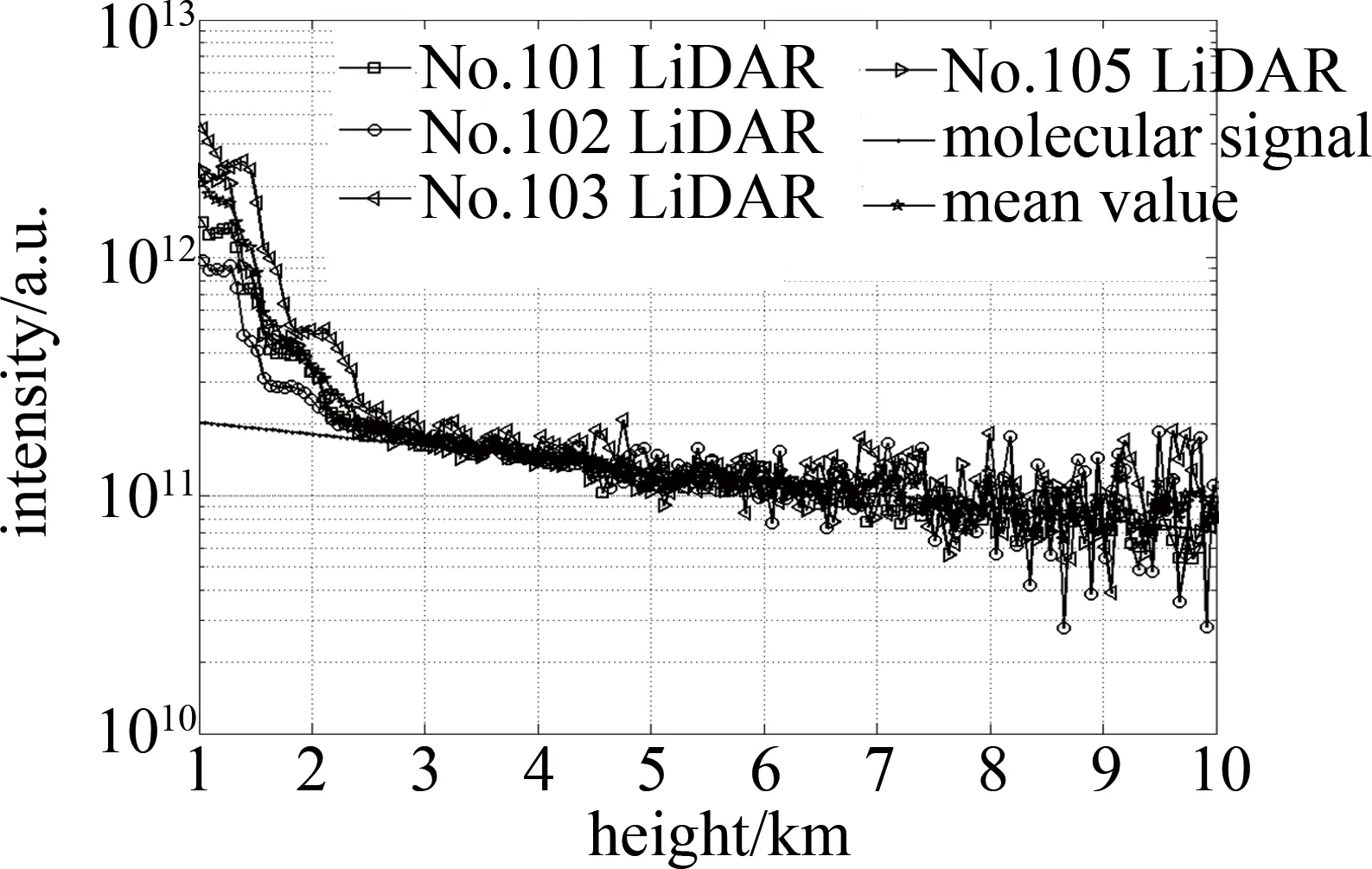
Fig.2 Comparison of range square correction signals of 532nm Mie scattering channel for 4 LiDARs from 2017-09-08T22:00 to 2017-09-08T22:10(10min accumulation)
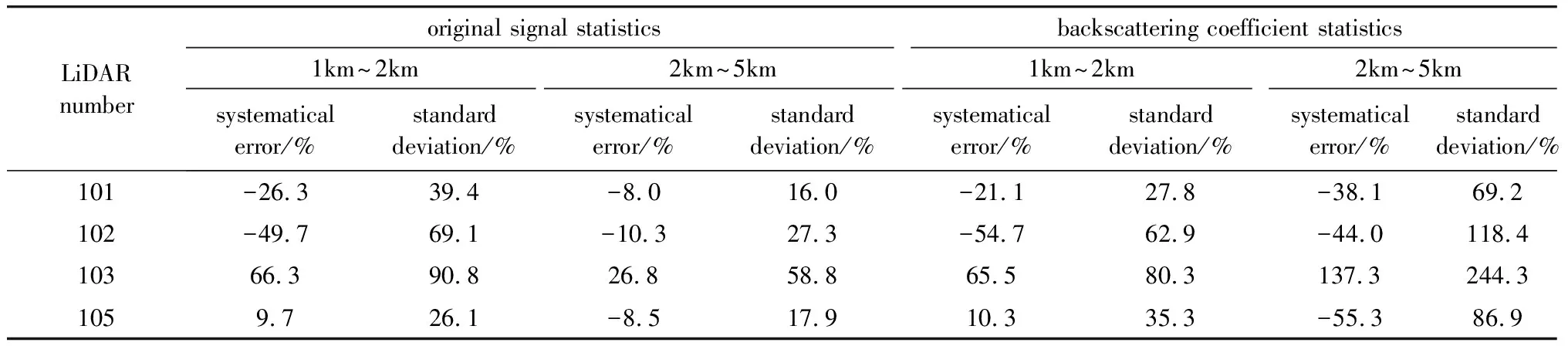
Table 2 Comparison and analysis table of 532nm Mie scattering raw signal and backscattering coefficients for 4 LiDARs from 2017-09-08T22:00 to 2017-09-08T22:10
從表2可知,參加標定的雷達的532nm通道的原始信號和反演得到的后向散射系數的一致性較差,如不進行標定,組網后的數據無法使用。
3.2 標定過程及分項結果分析
本次標定試驗包括雷達AD卡底噪標定、信號飽和度標定、發射接收光軸同軸度標定、瑞利散射信號合理性標定和聯合對比觀測標定等5個分項開展的,對每個分項的標定方法和標定結果進行了分析。
3.2.1 模擬采集通道底噪標定 對于雷達系統的模擬采集通道,其底噪是否水平及噪聲的大小,會影響信號的質量,對參加標定的模擬采集通道的底噪進行分析。在所有參加標定的雷達中,101號雷達的532nm米散射信號采用模擬和光子計數融合的方式探測,105號雷達的532nm米散射通道僅使用模擬方式采集。蓋上望遠鏡的蓋子,得到采集卡的底噪曲線。圖3是101號雷達P模擬通道的3000s累加底噪圖。整個通道包括8000個距離庫,距離分辨率為3.75m,把每100個庫分成1段,計算該段的噪聲的相對標準偏差,以及該段的噪聲平均值與整個8000個庫噪聲的平均值的相對標準差。101號雷達和105號雷達模擬通道的最大相對偏差如表3所示。
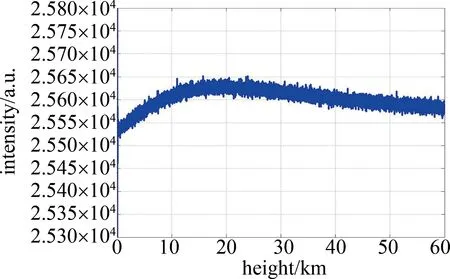
Fig.3 3000s cumulative background noise map for 532nm P analog receiving channel of No.101 LiDAR
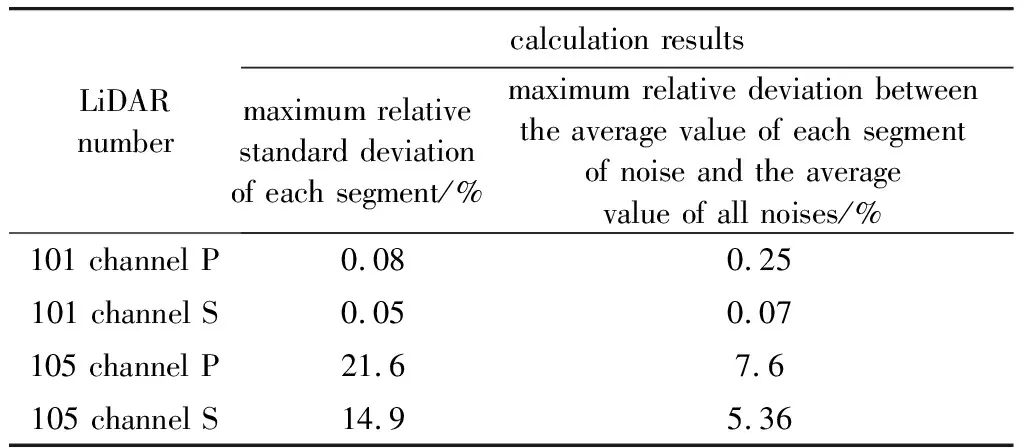
Table 3 Background noise analysis result table of analog channel for No.101 and No.105 LiDARs
可以看到,兩部雷達的模擬通道在進行信號處理時需要定期測量背景噪聲,并減除背景噪聲,圖4是101號雷達532nm模擬接收通道在校正之前和之后的后向散射系數結果對比圖。兩者的后向散射系數在2.13km的相對偏差達到了42.7%,在1km~5km高度范圍內的平均相對平均偏差為19.4%。
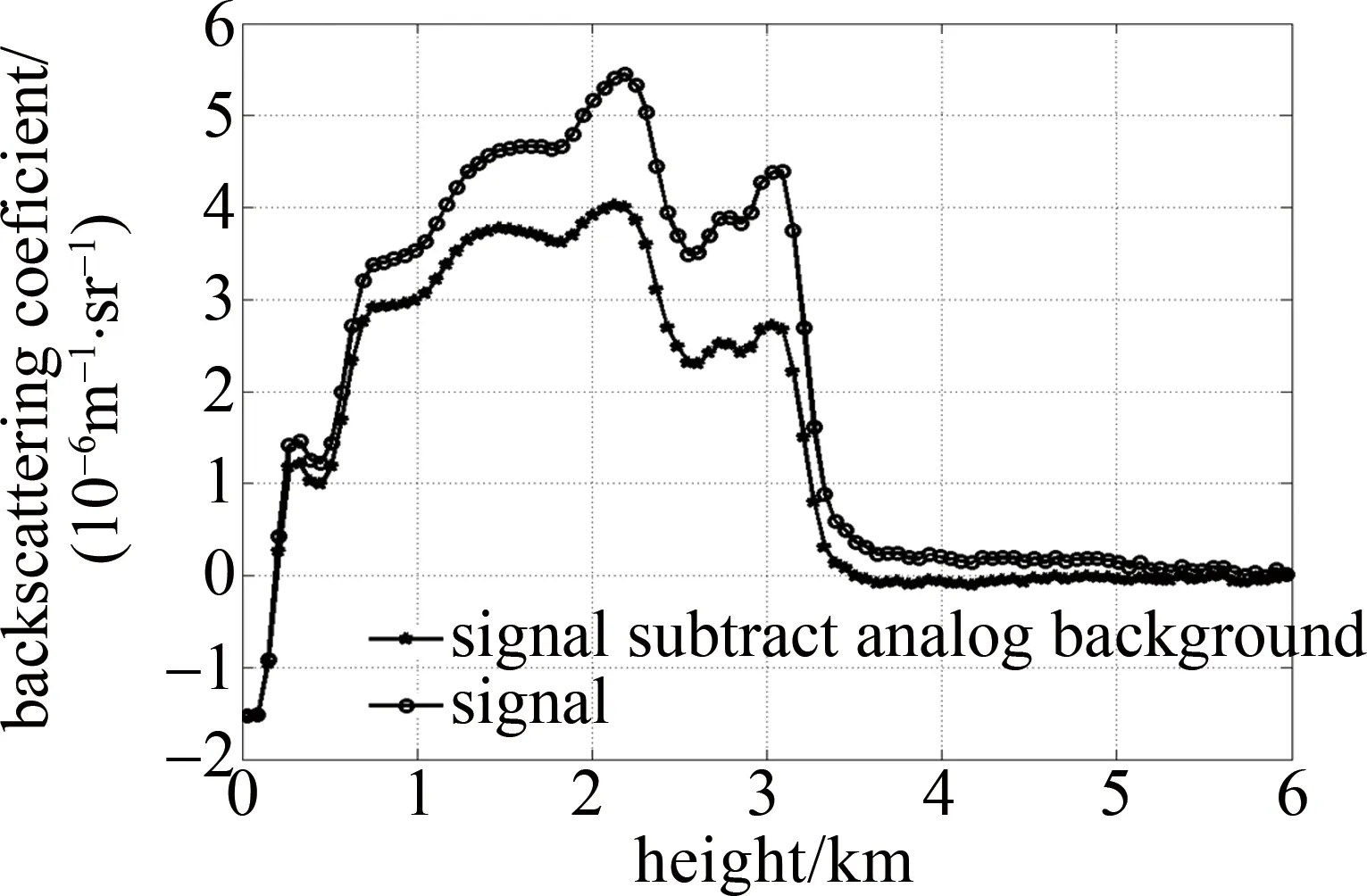
Fig.4 Backscattering coefficient map for 532nm analog channels of No.101 LiDAR before and after background noise correction
3.2.2 信號飽和檢查 對于信號是否飽和的檢查方法,是在假設大氣穩定的條件下,采用更換衰減片或者降低激光器發射功率的方法。為了縮短測試時間,降低大氣氣溶膠變化帶來的誤差,本文中主要采用降低激光器功率的方法來測試,從激光器發射最大的功率開始,逐步降低,測試過程中最小的功率至少要小于最大功率的20%,對不同發射功率對應的不同接收信號,進行距離平方校正,并取對數。作者選取信噪比高的一段數據,且連續分析一段數據的平行度,通過多組數據平行度分析以降低由于激光能量降低帶來的信噪比的影響,同時如果大氣穩定性不好,可以反復多次測量。
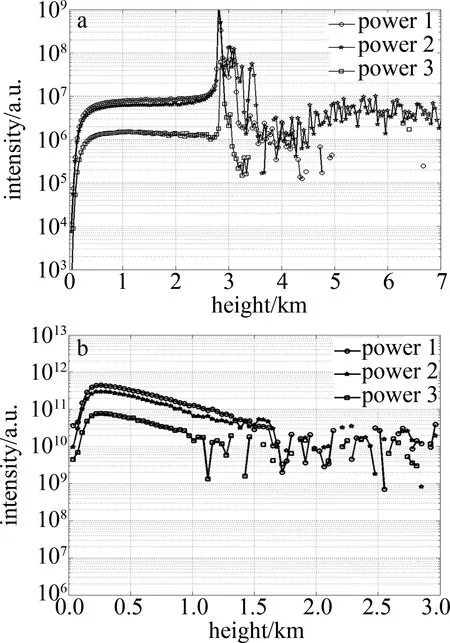
Fig.5 Saturation calibration for No.102 LiDARa—before calibration b—after calibration
對102號雷達飽和度進行檢查標定,標定前后的數據進行處理如圖5a所示,調整發射功率之后,標定的數據如圖5b所示。power 1是接收通道正常工作條件下的回波信號,power 2一直到power 3是逐步降低發射功率后的回波信號。對3條回波信號的距離平方校正信號取對數,分別擬合斜率,分析結果如表4所示。可以看到,標定前回波曲線的傾斜角度最大差值為5.1°,標定后的最大差值為1.5°。
采用相同的方法對101號~106號雷達的飽和情況進行檢查標定,標定后的結果如表5所示。
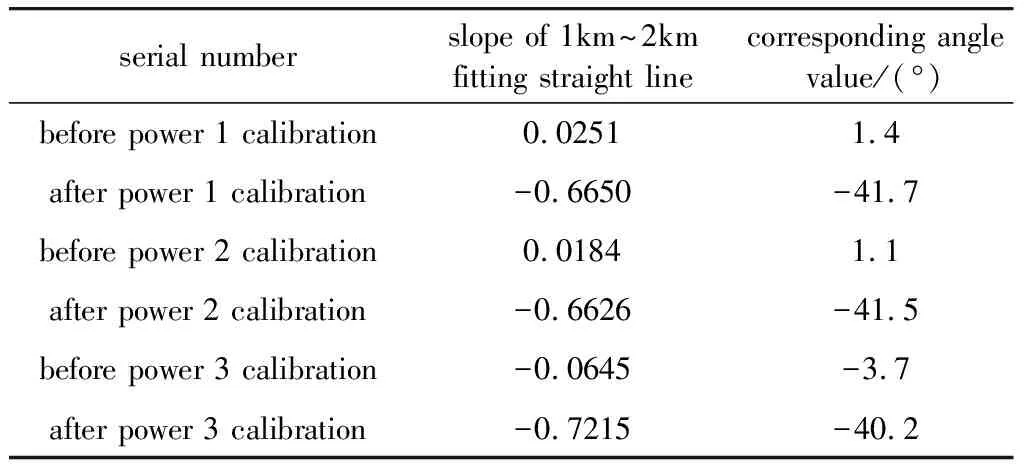
Table 4 Comparison of the results before and after saturation calibration for No.102 LiDAR
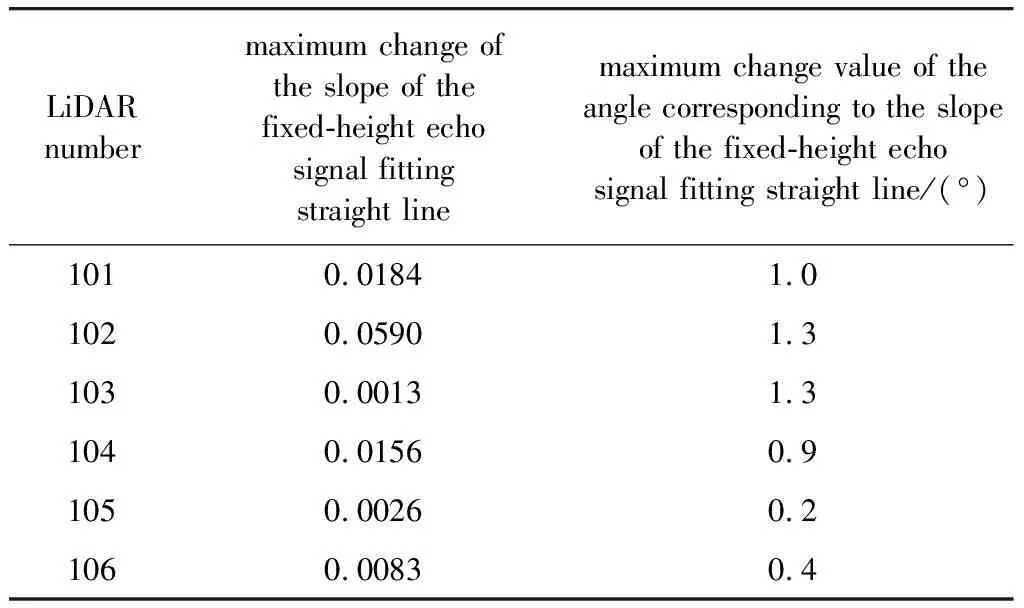
Table 5 Calibration result analysis table of saturation check for No.101~106 LiDARs
3.2.3 望遠鏡對中檢查標定 望遠鏡對中檢查標定的目的是把發射激光的光軸與接收光軸重合。把望遠鏡分為4個象限,與激光發射口之間的位置關系如圖6所示。包括2種模式:第1種是發射激光與望遠鏡非同軸的情況,如圖6a所示,定義為F1方式;第2種是同軸的情況,如圖6b所示,定義為F2方式。在進行標定時,輪流打開ABCD這4個象限的遮擋板中的一個,接收大氣回波信號,采集并比對分析。對于F1的標定方式,由于ABCD4個象限與發射激光的相對位置不同,在0km~1km,A象限的信號最強,B象限信號最弱,CD象限信號相同,在1km~5km,4個象限的信號應該完全相同;對于F2模式,0km~5km的信號都應該完全相同。
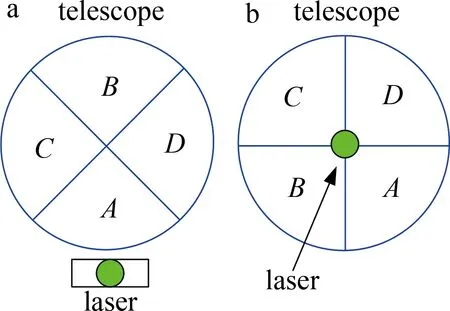
Fig.6 Position diagram of laser and telescope in four quadrant calibration
經過標定后,部分雷達的對中情況有了較大的改善,少數雷達后期需要通過改進接收系統的結構設計,才能進一步優化發射和接收光軸的一致性。104號雷達標定前后雷達ABCD這4個象限的回波信號以及信號的平均值圖如圖7所示。由于104號雷達為非同軸結構,AB兩個象限在低空的回波信號差值應該較大,CD兩個象限在低空理想情況下應該是完全重合的,從圖7a可以看出來,標定前在0km~1km高度B象限的值要高于D象限的值,CD兩個象限的信號差值也非常大,標定后(見圖7b)可以看出,CD象限曲線在低空的差值明顯降低,光路得到優化。
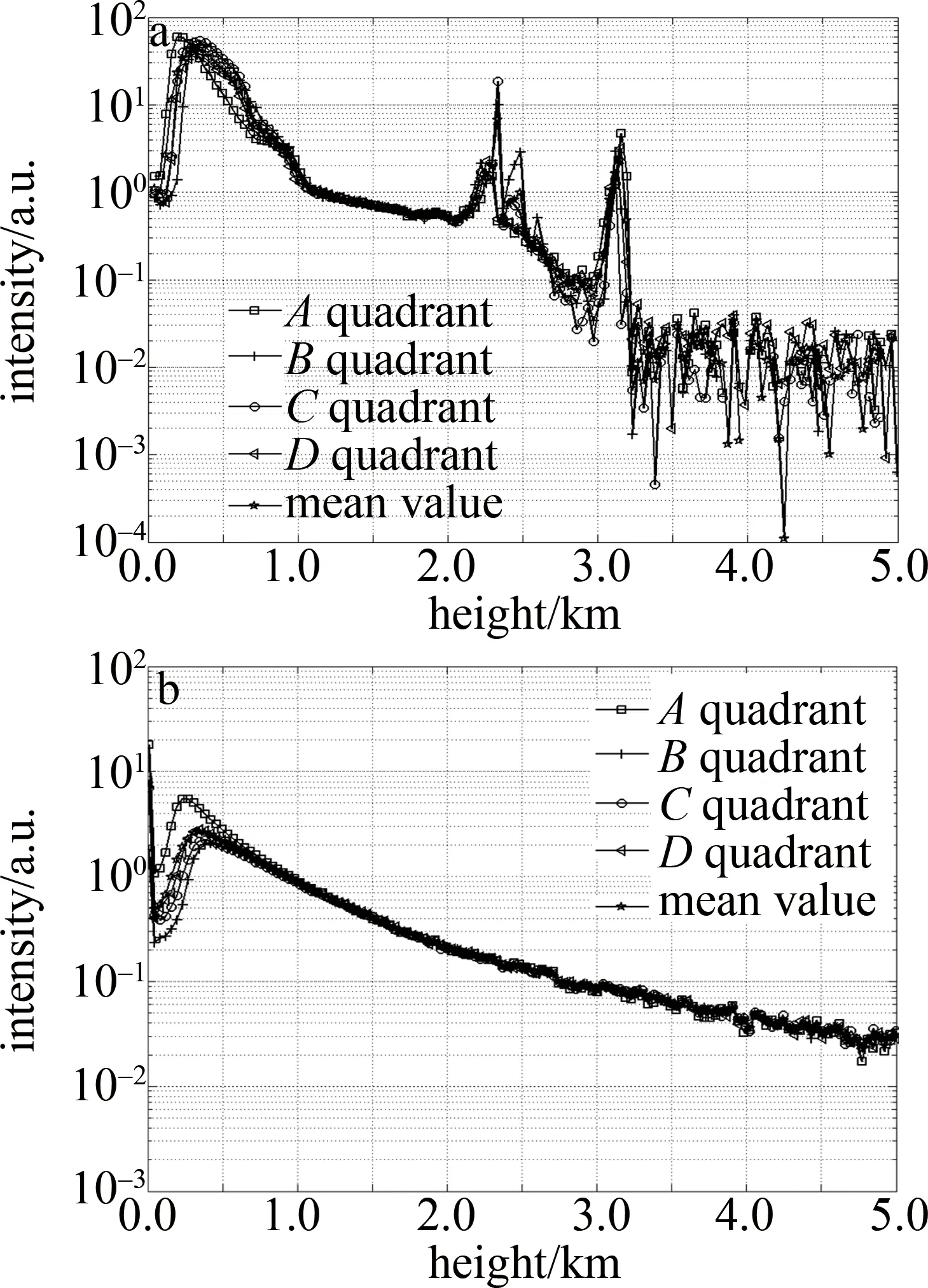
Fig.7 Curve of four quadrant signal before and after calibration for No. 104 LiDAR
對標定前后5km以下的4個象限的數據與平均值的相對標準差和相對系統差進行統計分析,如表6所示。在低空0km~1km高度范圍內,CD兩個象限平均值的相對系統差從18.7%降到7.8%,標準差從26.7%降到11.3%。
101號、103號、104號氣溶膠激光雷達采用F1標定方式,102號、105號和106號雷達采用F2標定方式。根據雷達的硬件特點以及標定時的大氣情況,對低、中、高3層回波信號進行統計分析,如表7所示。
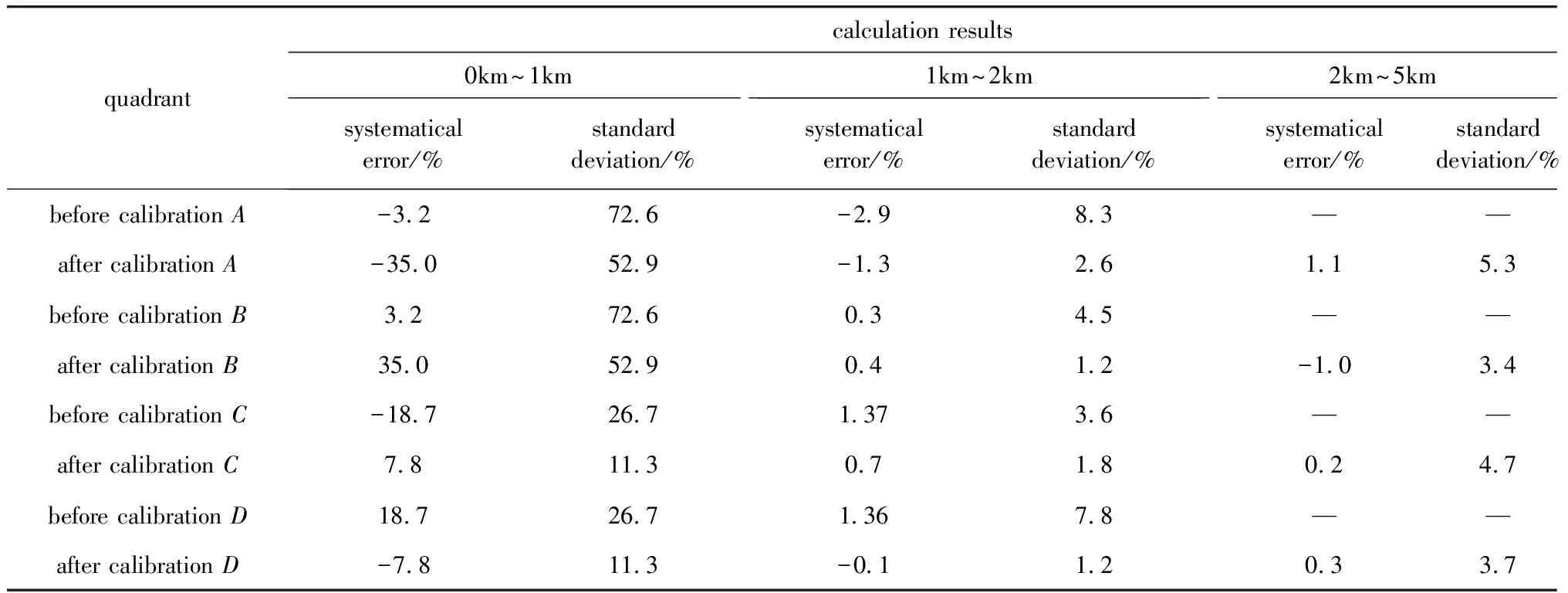
Table 6 Statistical analysis results of different heights before and after four quadrant calibration for No.104 LiDAR
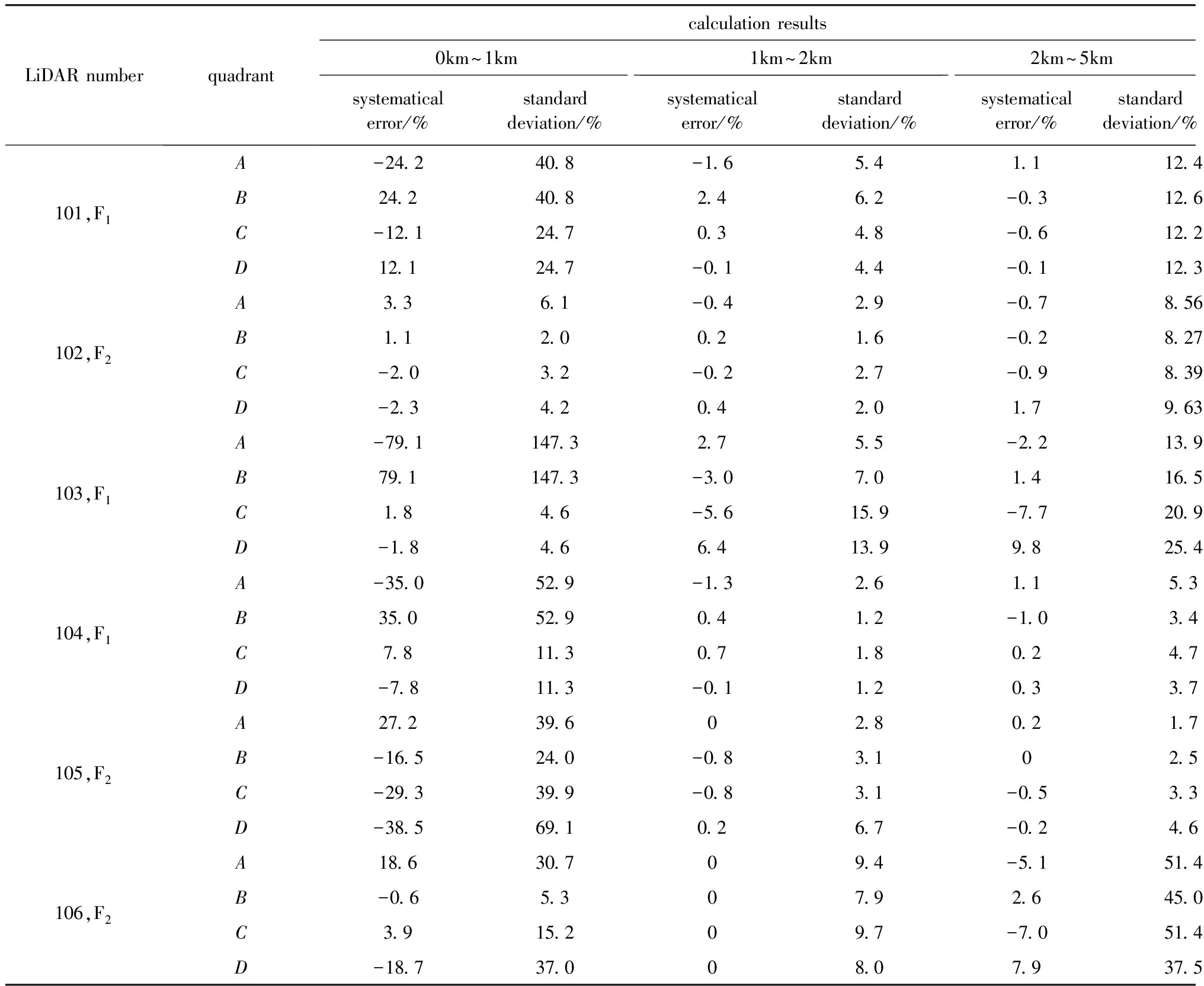
Table 7 Four quadrant calibration results for No.101 LiDAR
3.2.4 瑞利散射信號檢查標定 在大氣邊界層之上,大氣氣溶膠的含量非常少,可以假設為0,利用計算出來的大氣分子回波信號與雷達測量得到的邊界層以上的大氣回波信號進行對比,來判斷雷達的光路和光電器件是否存在問題。106號雷達532nm米散射通道的回波信號與大氣分子信號對比圖如圖8所示,圖8a是標定之前的對比結果,圖8b是標定之后的對比結果,標定之前和標定之后雷達回波信號與計算的大氣分子信號之間的標準差和系統差,如表8所示。
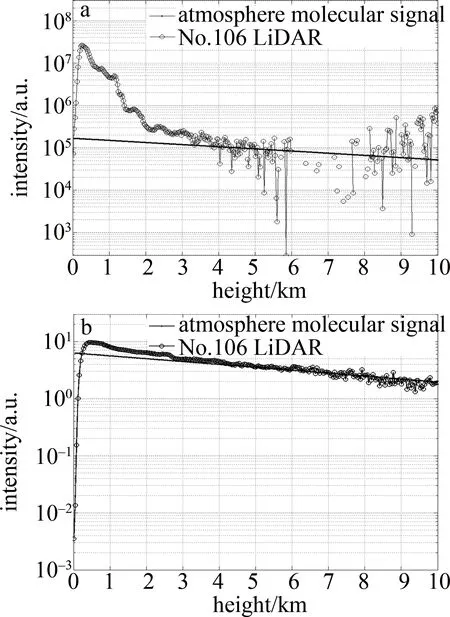
Fig.8 Comparison between echo signal of No.106 LiDAR and atmospheric molecular echo signal
對101號~106號雷達的大氣分子回波信號進行檢查標定,標定后的結果如表9所示。可以看到,在3km~7km高度系統差一般都小于10%,標準差都小于20%,個別雷達標準差較大,主要是由于遠場信號的信噪比降低造成的。
3.2.5 低空氣溶膠信號比對觀測標定 在完成了雷達的AD卡底噪、信號飽和度、望遠鏡四象限對中、瑞利散射信號擬合等幾項標定之后,對6部雷達在同一時刻同一時間段內累加的實測信號,進行對比分析。2017-09-14T03:00~2017-09-14T03:10,6部雷達在南郊觀象臺開展觀測,對532nm米散射通道回波信號,進行距離平方校正和歸一化處理,如圖9所示。去掉0km~1km的overlap區,對雷達1km~5km高度范圍內的信號進行相對系統差和相對標準差的統計分析,結果如表10所示。可以看到,1km~2km范圍內,最大相對標準差為10.8%,2km~5km范圍內最大相對標準差為9.3%,6部雷達觀測原始強度數據的一致性有了明顯提高。
3.3 氣溶膠消光系數計算結果對比分析
使用相同的反演算法對6部雷達標定好的原始信號進行反演,得到6部雷達同址同時刻觀測的后向散射系數曲線,如圖10所示。對1km~5km高度范圍內的反演結果進行相對系統差和相對標準差的統計分析,如表11所示。可以看到,1km~2km高度范圍內的最大的相對標準差為21.0%,2km~5km最大相對標準差為35.9%。
分別對雷達在上述2個高度范圍內的后向散射系數進行積分,在1km~2km高度范圍內,其積分值的變化范圍為3.4×10-5~4.1×10-5,變化范圍約為6部雷達在該高度范圍內積分最小值的20.6%,在2km~5km高度范圍內,其積分值的變化范圍為3.7×10-5~5.9×10-5,變化范圍約為6部雷達在該高度范圍內積分最小值的32.4%。

Table 8 Comparison of Rayleigh signal of No.106 LiDAR before and after calibration
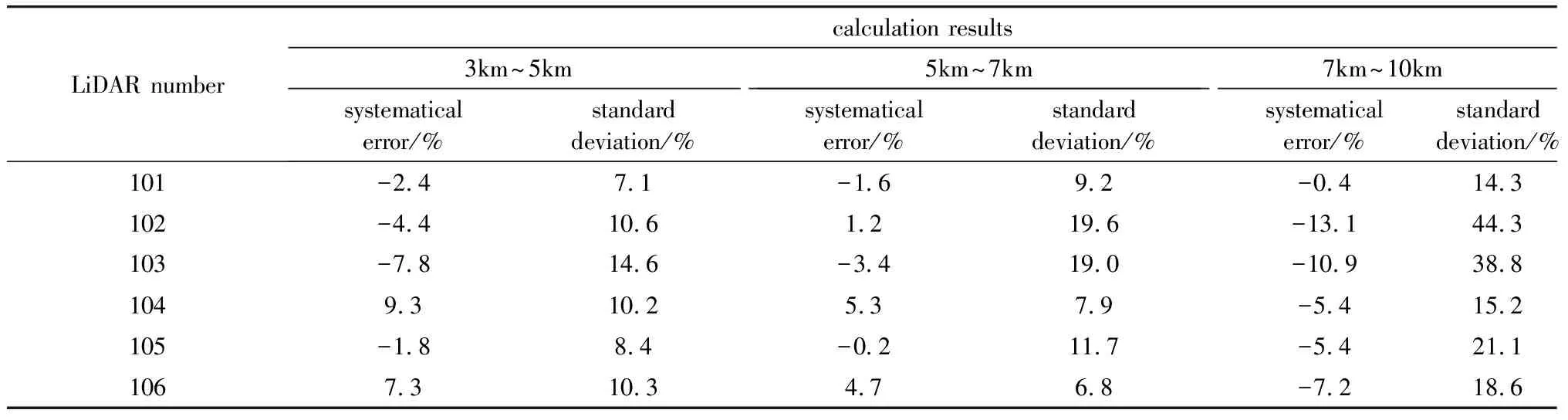
Table 9 Calibration results of Rayleigh signal for No.101~106 LiDARs
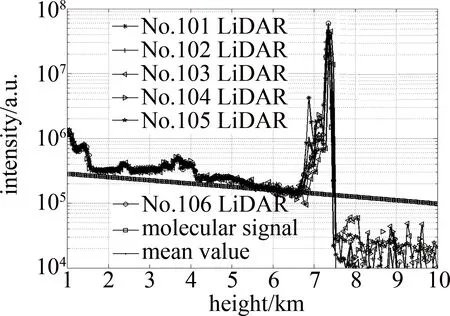
Fig.9 Comparison of 532nm normalized signal from 2017-09-14T03:00 to 2017-09-14T03:10(10min accumulation)
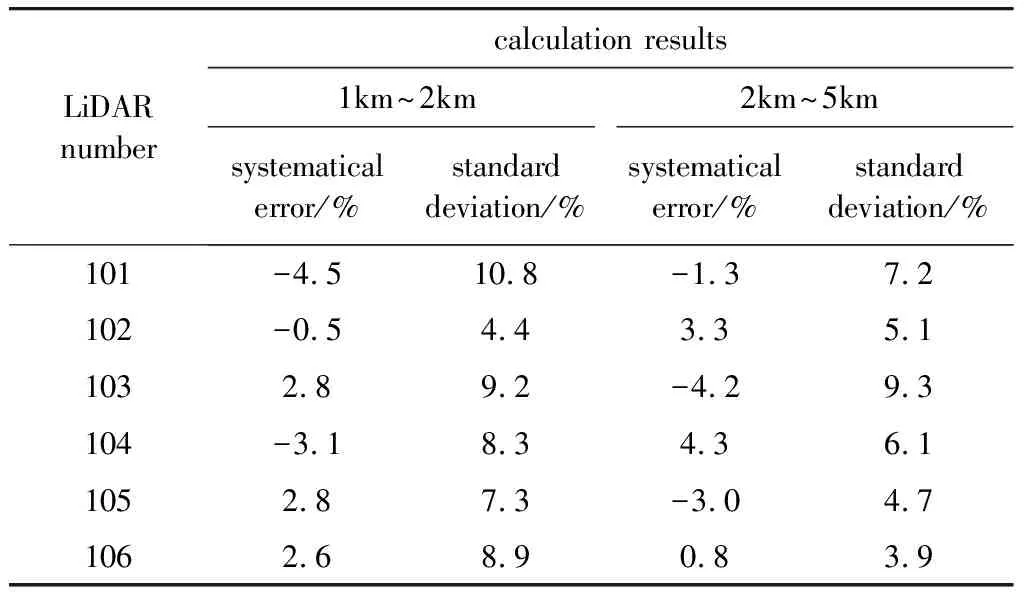
Table 10 Calibration results of 532nm Mie scattering signal for 6 LiDARs (10min accumulation)
4 結 論
2017年9月,在北京南郊觀象臺對參加中國氣象局組織的超大城市氣象觀測試驗的6部氣溶膠激光雷達的532nm米散射通道的光路分系統、光電轉換和數據采集分系統進行了檢查標定,使用統一的算法,對標定后532nm通道的原始信號進行處理得到了后向散射系數,并對標定前后的原始信號和后向散射系數進行了比對分析。
(1) 1km~2km原始信號的相對系統差從66.3%降低到4.5%,相對標準差從90.8%降低到10.8%。
(2) 2km~5km原始信號的相對系統差從65.5%降低到4.3%,相對標準差從80.3%降低到9.3%。
(3)1km~2km后向散射系數的相對系統差從26.8%降低到10.6%,相對標準差從58.8%降低到21.0%。
(4)2km~5km后向散射系數的相對系統差從137.3%降低到17.6%,相對標準差從244.3%降低到35.9%。
(5)分別對氣溶膠激光雷達的后向散射系數進行積分,在1km~2km高度范圍內,標定前其積分值的變化范圍為最小積分值的272.9%,標定后為20.6%;標定前在2km~5km高度范圍內,其積分值的變化范圍為最小積分值的430.3%,標定后為32.4%。
除104號激光雷達在2km~5km高度范圍內的消光系數結果大于表1中所述目標值之外,其余結果均達到上述目標值。該次標定是大城市試驗中氣溶膠激光雷達的首次聯合對比觀測標定,喇曼通道、355nm、1064nm通道以及低空overlap區的信號的檢查標定尚未開展,后期將繼續開展上述項目的標定。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06