一種基于機載LiDAR數據的山區道路提取方法
2022-07-11 02:23:02劉國棟
激光技術 2022年4期
劉國棟,劉 佳,劉 浪
(重慶交通大學 土木工程學院,重慶 400074)
引 言
山區道路因存在著樹木遮擋、彎多坡陡的特性,給道路空間信息的獲取帶來了巨大的挑戰。當前道路信息獲取方法按照數據來源可分為3類:基于浮動車軌跡數據、基于遙感影像和基于高密度點云數據[1]。基于浮動車軌跡數據獲取道路利用車輛的低頻低精度全球定位系統 (global position system,GPS) 軌跡數據作為道路信息提取框架,具有數據獲取成本低、現實性強等優點[2],但是主要應用在城市及一些車流量大的區域,對于山區道路適用性不大。基于遙感影像獲取道路信息的研究已發展多年,有些方法還應用在了一些商業軟件上,如:Erdas采用了模板匹配法、eCognition采用了面向對象法[3],但是基于遙感影像提取道路仍存在一些局限:樹木遮擋造成的數據空白、同譜異物與同物異譜造成的誤判、陰影以及影像的明暗變化造成的誤判等[4]。基于高密度點云數據可以很好地規避用遙感影像提取道路的問題:由機載激光雷達 (light detection and ranging,LiDAR) 獲取的點云具有同一性,不會有遙感影像因陰影以及明暗變化帶來的誤判[5]。機載LiDAR還具有一定穿透能力可獲得多次回波,能在一定程度上避免由于樹木的遮擋而造成的數據空白[6]。因此,利用機載LiDAR點云的豐富信息提取地形陡峭復雜、植被茂密且本身蜿蜒曲折的山區道路引起了眾多研究人員的關注。
在機載LiDAR點云數據中,道路點有兩個明顯的特征:(1)因道路路面較為平滑,故路面點云間的高程差異和起伏差異都小于周圍的建筑物、溝坎、植被等地物[4];(2)因一定區域內的道路一般采用的構筑材料一致,獲取的路面點的反射強度具有一致性,與周圍其它地物地面點具有明顯區別[5]。目前,基于機載LiDAR點云數據提取山區道路都是基于以上特征進行。HE等人[7-9]利用道路的連續性與局部區域起伏較小等特性設定多特征閾值的方法來提取道路點取得了不錯的效果,但是在閾值的設定上需要人為調試后設定效率較低,且閾值的普適性也較低。為解決道路提取閾值問題,HUI[10]與SNCHEZ等人[11]引入偏度平衡算法自動計算得到道路強度閾值,在城市等道路區域占比較大的區域得到了不錯的效果,但是該方法不適合應用在農村及山區道路占比較少的地區。AZIZI等人[12]與FERRAZ等人[13]先將點云轉為數字地面模型(digital terrain model,DTM)再分別引入支持向量機與隨機森林機器學習算法,訓練影像分類模型從DTM中提取道路柵格進而得到道路信息。將點云轉為DTM提取道路雖縮短了計算時間,但卻降低了道路的辨識度,最終影響道路提取精度。YUAN等人[14]直接引入了隨機森林算法從多光譜LiDAR數據中提取獲得道路中心線,使用多光譜LiDAR能增加分類特征,提高分類精度,但也同時增加了模型訓練與分類的時間,降低了效率。
針對從機載LiDAR數據中提取山區道路閾值設定難、普適性與提取效率低的問題,本文中直接將隨機森林分類模型應用在濾波后的地面點云中,選用坡度、粗糙度等5類特征提取初始道路點云,再通過基于密度的噪聲應用空間聚類算法 (density-based spatial clustering of application with noise,DBSCAN) 聚類精化,最后柵格投影矢量化得到道路中心線。
1 山區道路提取方法
本文中主要是對參考文獻[13]中的道路提取方法進行改進,提出一種將隨機森林分類模型直接應用在機載LiDAR點云中提取山區道路,具體方法流程如圖1所示。
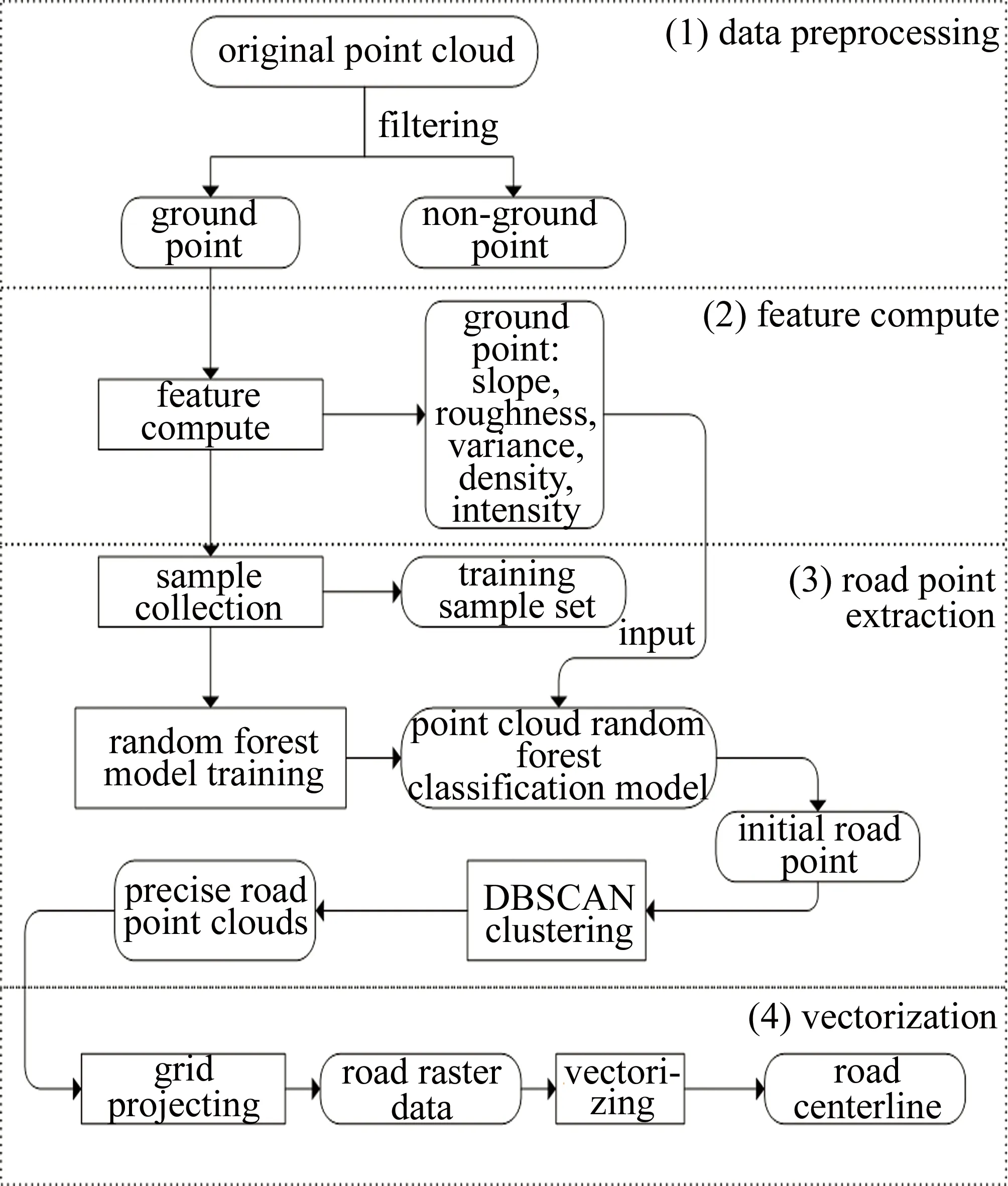
Fig.1 Flow chart of extraction method
主要分4個階段進行:
(1)數據預處理。點云濾波,道路點歸屬地面點云范疇,從原始機載LiDAR點云數據出發,濾除房屋、電線、植被等非地面點,濾波獲取取地面點云。
(2)特征計算。根據山區道路特性,除原始機載LiDAR點云的反射強度信息之外,計算地面點云各點鄰域特征:坡度、粗糙度、高差方差和點密度,與原反射強度共同組成點云分類的特征集。
(3)道路點云提取。樣本集制作:從特征計算完成的點云中,手動提取道路點與非道路點,并賦上類別標簽制作成樣本集。模型訓練:將樣本集進行隨機森林分類模型訓練,得到點云隨機森林分類模型。初始道路點云提取:把地面點云特征值輸入分類模型中,取得各點的類別標簽,按道路類別提取初始道路點云。精化道路點云:采用DBSCAN聚類算法對初始道路點云去噪精化。
(4)矢量化。將精化道路點云格網化重采樣投影到xOy平面生成道路柵格數據,再對柵格數據矢量化,最終獲得道路中心線。
2 點云特征
為將道路點所具備的連續性、平滑性及反射強度一致性等特征應用到道路提取中來,計算地面點云各點在鄰域內的坡度、粗糙度、高差方差及點密度,與點云的反射強度組成點云的分類特征。
(1)坡度。鄰域點的擬合平面與水平面的夾角。道路區域在局部鄰域范圍內可近似看作為平面,相對于非道路區域,道路區域的坡度相對較小且穩定。空間中,點的法向量是描述點所在面的朝向,可通過先計算法向量再求得點的坡度值。對每個離散點的鄰域點進行平面擬合,將擬合的平面方程轉換為一般式,需滿足下式:
Ax+By+Cz=D,(D≥0,A2+B2+C2=1)
(1)
式中,A,B,C分別為平面的法向量在x,y,z這3個方向上的分量,D為常數。為獲取最佳擬合平面,采用最小二乘法求解擬合平面,即保證所有點到平面的距離之和最小。所求的法向量中,z方向的分量表示點鄰域范圍坡度的平緩程度,該分量越大表示越平緩,反之越陡峭,為便于理解將之轉化為坡度表示:
(2)
式中,θ為擬合平面坡度。
(2)粗糙度。鄰域內所有點的高程標準差。山區道路具有連續性,在小區域范圍內路面高程值差異小,不會出現大的波動與突變,計算的高程標準差可評估局部區域的異質性,值越大表明鄰域內高程變化越大,當前點屬于道路點的可能性就越小。
(3)高差方差。鄰域內所有點與當前點的高差方差,用以描述點在鄰域內的高差變化的穩定性。相對非道路點云,道路點云高程變化緩和,高差方差較小。
(4)點密度。即點鄰域內的點個數,道路區域相較于其它地面區域因地勢平坦、樹木遮擋較少,濾波后的該區域點較為密集。
(5)反射強度。LiDAR點云對于相同材質的地物反射強度具有很強的同一性,利用反射強度特征進行道路的提取,這為道路點云的分類提取提供了最重要的特征,也是最有區別力度的分類特征。
3 山區道路提取實驗與分析
實驗中所使用機載LiDAR點云數據來源于美國普吉特海灣激光雷達聯盟(The Puget Sound LiDAR Consortium,PSLC) 2013 Entiat River LiDAR項目所提供的部分山區點云數據,如圖2所示。數據中共計點2738288個,平均點密度為13.82/m2,實驗數據包含地面、植被、道路、房屋等點,道路位于數據中央地勢平緩的溝谷區域,道路兩側為山區常見的陡緩坡交替地形,點云高差達到205.76m,具有很好的山區代表性。
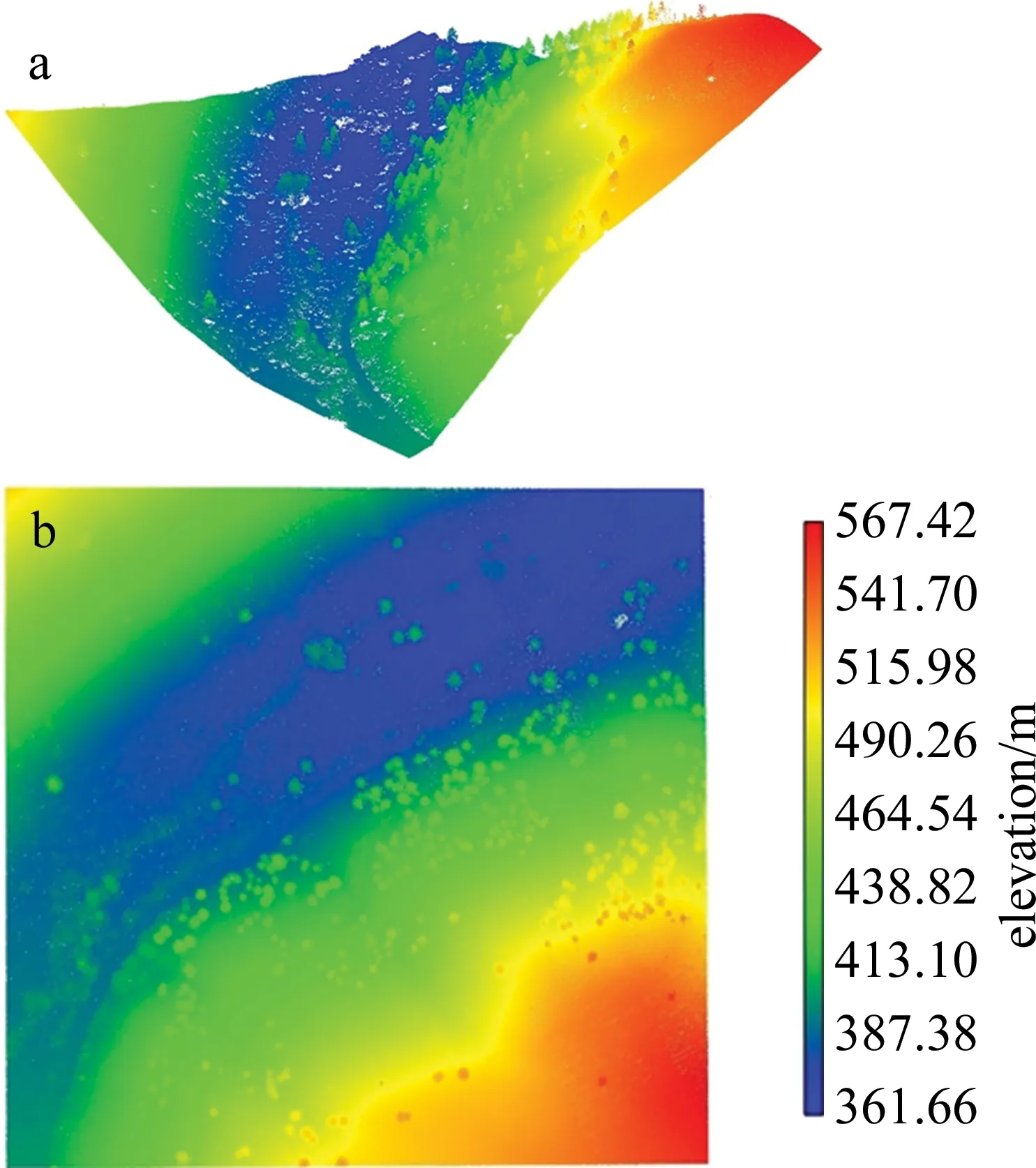
Fig.2 Experimental data
3.1 數據預處理
本文中使用LiDAR360點云軟件濾波,考慮山區地形高差起伏變化較大,采用在山地森林地區穩健性較好的漸進加密三角網濾波法[15]對原始LiDAR點云濾波,該方法首先需參考數據內最大建筑物的邊長劃分虛擬格網,獲取格網內最低點作為地面種子點。然后對種子點建立不規則三角網 (triangulated irregular network, TIN) 進行迭代加密,迭代過程中,計算判斷其余點到所對應三角形的距離與角度是否滿足閾值,滿足則加入地面點中生成新TIN。迭代過程一直到沒有點再加入TIN為止,最后TIN中的點即為地面點。濾波結果如圖3所示,獲取地面點共計1281419個,樹木房屋等非地面點基本去除,且道路區域點云保留良好。
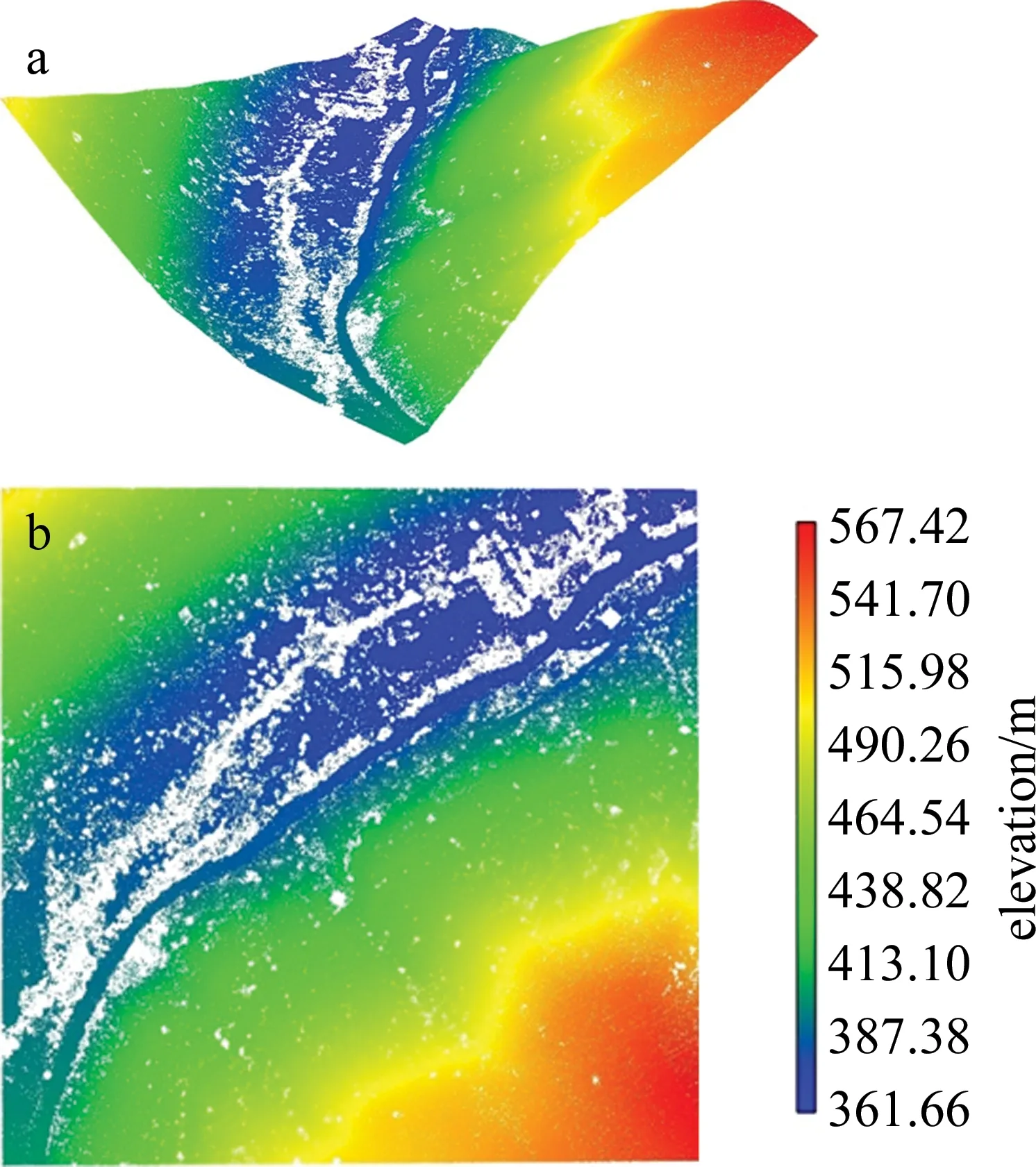
Fig.3 Ground point cloud after filtering
3.2 特征計算
地面點云特征計算可根據點云的密度來設置鄰域距離,其原則是計算盡量小的區域范圍,但需盡可能地減少計算特征出現空值。本文中數據濾波后的平均點密度為6.5/m2,將點鄰域設置為0.5m來計算點云特征,對各個特征進行灰度可視化渲染,如圖4所示。
在坡度、粗糙度與高差方差3個點云特征圖像中,整體道路點云表征明顯,與周圍非道路點云差異較大,特征值主要集中在小數值上,可以作為道路點分類判斷的重要依據。在點密度特征圖像中,整體道路點云密度較非道路點云要大,但是某些路段區域卻出現斷層現象(點密度變小),分析原因可能是因為原始激光點云采集時掃描不均勻,導致這些區域點密度過小。在反射強度特征圖像中,呈現出兩條具有不同特性的道路:其中一條道路點云反射強度值集中在較小數值上,與周圍非道路點云差異明顯;但另一條道路點云反射強度值與周圍非道路點云差異不大,推斷是因該條道路所用材質為沙石泥土所致。為了能夠得到完整的道路點云,在道路點云提取過程中需要將所有道路點云所表現出的點云特征都予以考慮,即在樣本采集時對密度小的道路斷層區域與道路反射強度差異小的區域選擇性采集。
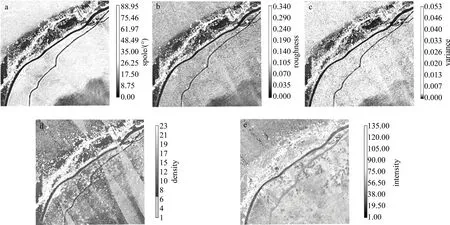
Fig.4 Point cloud characteristics
3.3 道路點云提取
3.3.1 樣本集制作與分析 本文中道路點云提取采用一種監督分類的方式,需要對特征計算完成的地面點云人工采集具有代表性的先驗點作為樣本集。樣本類別分為兩類,正樣本即道路點,負樣本即非道路點。為了結果能獲取較完整道路點,樣本采集尤為關鍵,需要遵循代表性、概括性與完整性,根據山區道路點云特征,選擇主要依據可為反射強度值、坡度和地形表面的高程起伏形態。使用CloudCompare軟件從特征計算完成的點云中,手動提取正負樣本點,并賦上類別標簽。分析山區道路的分布與計算完成的分類特征后,最終確定訓練樣本集分3個區域采集,主要圍繞道路分布在河谷區域、山腰區域(樣本集在地面點具體分布如圖5所示)共計100494個,道路點(標簽值為1)33848個,非道路點(標簽值為0)66646個。
為分析點類別與點特征的相關性,繪制樣本集的兩類點在各特征上的分布圖,如圖6所示。縱坐標是各個特征對應特征值點云個數,橫坐標除了圖6a以外,其余都是無量綱量。由圖6可看出,道路點與非道路點在各特征中分布具有明顯差異,在坡度、粗糙度、高差方差特征中,道路點分布聚集且峰值突出并集中在較小的數值上,而非道路點分布則較為分散,峰值出現在較大數值上;在點密度與反射強度特征上:道路點密度較非道路點大,而反射強度則較小。因此坡度、粗糙度、高差方差、點密度與反射強度可以作為道路點云判斷分類的重要特征。

Fig.5 Samples point(“1” for road points, “0” for non-road points)
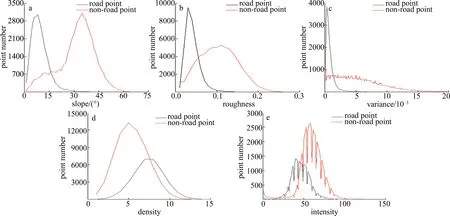
Fig.6 Road points and non-road points are distributed in various features
3.3.2 點云隨機森林分類模型構建 隨機森林是BREIMAN于2001年提出的一種機器學習預測分類算法[16],以決策樹為基本單元,通過將多棵決策樹集成在一起,最終結果由每棵決策樹結果綜合投票所得。隨機森林是以隨機抽樣方式構造出不同訓練集,使每棵決策樹之間都沒有關聯,從而提高分類模型的外推能力,不易出現過擬合現象,同時對異常值與噪聲都又很強的容忍度[17]。在面對分類數據不平衡時,如山區道路點云占地面點云比例非常小,使用隨機森林可進行誤差平衡,做到準確分類。
把采集制作的樣本集按照7∶3隨機拆分為訓練集與測試集,使用訓練集進行點云隨機森林分類模型構建。將計算的5個點云特征以及樣本集的類別標簽作為模型訓練構建的輸入值,通過Python編程構建點云隨機森林分類模型,構建步驟[18]見下:(1)從訓練樣本集中有放回的隨機抽取n個樣本數據,再從所有特征中隨機抽取m個特征變量,由此生成新的點云樣本集合,訓練生成點云分類決策樹;(2)重復上述過程生成k棵分類決策樹,每棵決策樹對應根節點儲存抽取的樣本數據,從根節點出發,按照最小不純度原則尋找最佳特征變量,分裂生成子節點;(3)對每棵樹遞歸地選擇分裂節點,直至不能繼續分裂為止,但在實際過程中,為加快決策樹的生成與防備過擬合現象發生,需要設定額外的限制條件——最大樹深和最小葉節點,即決策樹在小于最大樹深才能進行生長分裂;節點數據量在大于最小葉節點才能繼續分裂[19];(4)將生成的k棵分類決策樹組成隨機森林,在測試階段,每棵決策樹都對測試樣例進行一次投票,最后綜合票數最多的類別屬性賦值給測試樣例,以實現隨機森林分類。
點云隨機森林分類模型結構如圖7所示。
將測試點云樣本集輸入分類模型中,隨機抽取點云樣本集輸入給每棵決策樹;每棵決策樹又對輸入的3維點進行決策分類,獲得點的類別屬性;最后綜合所有決策樹的分類結果,對測試樣本集中各點的類別進行投票,票數最多的類別賦值給該點,即得到測試點云樣本集中的模型分類結果。
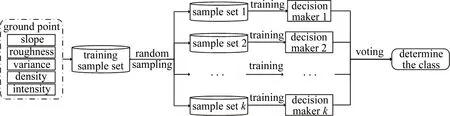
Fig.7 Point cloud random forest classification model
引入分類器評價指標[20]可得到模型精度評定,如表1所示。
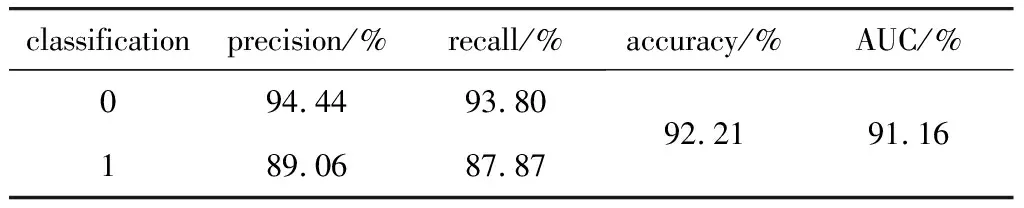
Table 1 Accuracy evaluation table of point cloud random forest classification model
表1中點云類別0為非道路點,1為道路點;precision為查準率,是分類模型判定正例中的正樣本比重;recall為查全率,是被預測正例占總正例的比重;accuracy為準確率,是分類器對整個樣本判斷正確的比重;接受者操作特性(receiver operating characteristic,ROC)曲線下面積(area under curve,AUC),即預測正確概率值。由表1可知,模型對道路點的預測分類查準率達到89.06%,查全率達到87.87%,分類模型的預測分類性也達到91.16%,說明分類模型能較好預測點云類別,能夠應用于山區道路點云分類提取。
3.3.3 道路點云分類提取 (1)初始道路點云提取。把地面點云輸入進隨機森林分類模型中進行分類預測,得到每個地面點的預測類別標簽,將其賦值到地面點云數據上,使每個點都有類別標簽,按照道路點類別標簽1輸出得到初始道路點云,結果如圖8a所示。

Fig.8 Road extraction results
初始道路點云共計點251887個,由圖8a可以看出,道路的整體基本提取完成,形狀與走向也還是較為明確,但是道路周圍還伴隨著大量非道路噪聲點,部分還聚集成塊狀分布。經分析發現這些噪聲點主要分為兩類:遠離道路的平緩離散噪聲點和聚集成塊且坡度平緩的河谷區域。
(2)精華道路點云。為精化分類提取的道路點云,本文中采用DBSCAN聚類算法進行去噪處理[9]。聚類參量初次設置可參考原始點云密度與特征鄰域計算范圍,然后根據可視化聚類效果進行調整,如本文中初始參量設置為:掃描半徑E=0.5m、最小包含點數M=6。經多次調整試驗后,參量設定為:E=0.8m,M=6,初始道路點云聚簇共有1271簇,將聚類結果賦色可視化渲染,如圖8b所示,藍色條帶狀為道路點簇。將道路點簇的點云輸出即得精化道路點云,所得精化道路點云共計點78209個,如圖8c所示,相比初始道路點云,噪聲點去除效果顯著,基本去除。
3.4 道路矢量化
為方便道路數據管理使用,精化的道路點云需要轉化為道路矢量線。使用ArcGIS軟件將精化后的道路點按1m×1m規格設定劃分格網,投影到xOy平面,得到道路柵格圖像,再將道路柵格圖像二值化,最后矢量化得到道路中線。把本文中方法提取道路中心線與手動提取道路的中心線疊加對比,如圖9所示(紅色為本文中方法提取,黑色為手動提取)。由圖9可知,本文中方法提取的山區道路整體走向基本與手動道路重合,證明本文中方法可高精度提取山區道路。
Fig.9 Road centerline
4 精度評定
為評定道路提取的精度,在缺乏實驗區域高精度道路信息的情況下,使用手動提取道路信息作評定標準,是道路提取精度評定的重要手段[8]。本文中鑒于機載LiDAR點云在3維空間信息上具有高精度的特點,使用手動提取原數據中的道路點云作為真值,對文中所述道路提取方法提取到的道路點云通過正確率Ct、完整率Cc和提取質量Cq來進行精度評定。
(3)
(4)
(5)
式中,Tp為正確提取到的道路點;Fn為未提取到的道路點;Fp為錯誤提取到的道路點。
實驗中區域手動提取道路點云為80163個,視作為真實道路點云,計算道路點云提取的完整率、正確率、質量3個指標,進行提取結果精度評定。引用參考文獻[9]中的山區道路提取方法進行對比,如表2所示。

Table 2 Accuracy evaluation table of road point extraction
兩種方法道路提取的正確率都較高,達到95%以上,完整率與提取質量也都能達到86%以上,綜合相比之下,本文中的方法略優于參考文獻[9]。在整個道路提取過程中,本文中方法使用對少量樣本訓練獲得的隨機森林分類模型,能自動提取道路點云,人為參與度較少,操作簡便且結果精度較高。參考文獻[9]中則是通過人為設定多特征閾值進行分類提取道路點云,分類提取時若其中一個閾值出現偏差,則會影響到整體的提取結果。因此該方法在每個特征閾值的設定上,都需要人為多次測試找到最佳閾值,操作過程較為繁瑣,且閾值設定還都需要考慮數據整體效果,在復雜的場景下將面臨閾值普適性差引起道路點云提取困難的問題。綜合精度與操作簡易因素,選擇本文中的方法用于山區道路提取更佳。
將兩種方法提取的道路點云與手動道路提取道路點云疊加對比,發現都存在未提取的道路點主要集中在山腰處的道路邊界,錯誤提取點集中在河谷道路邊界。經分析可知,是因山腰處的道路蜿蜒崎嶇且兩側點的高程差異大、坡度變化大;河谷處的道路較為平坦,兩側點的高程差異與坡度變化較小所致。在計算山腰道路邊界點的分類特征時,鄰域內包含大量非道路點,從而影響計算的分類特征值易偏向于非道路點造成漏分現象。在計算河谷道路邊界外點的分類特征時,鄰域內包含大量道路點,使分類特征易偏向于道路點造成錯分現象。
5 結 論
本文中以Entiat River 地區部分山區LiDAR點云數據為例,驗證所提出的使用隨機森林分類模型提取山區道路點云再通過聚類精化、柵格矢量化獲得道路矢量線的方法。首先對原始機載LiDAR點云濾波獲取地面點云,接著計算地面點的粗糙度、坡度、高差方差和點密度與反射強度組成分類特征值;然后手動采集少量正負樣本訓練山區道路點云隨機森林分類模型,測試驗證模型的分類預測正確率達到了91.16%,可用于分類提取山區道路點云;隨后使用分類模型對地面點云分類提取初始道路點云,經DBSCAN聚類去噪獲取精化道路點云,再柵格化、矢量化得到山區道路中心線;最后用手動提取道路點云對本文中方法道路點云提取作精度評定,又引入多特征閾值提取山區道路方法作比較。結果表明,使用本文中的方法不需要設定特征閾值就能高精度提取到山區道路信息。
使用LiDAR數據提取山區道路有一些需注意的地方:部分路段由于樹木遮擋使原始點云中地面點云過于稀疏,導致提取到的初始道路點云較為稀少,通過聚類精化后就會出現孔洞、斷截,可在原始激光點云采集時多角度、多架次進行,以提高地面點云密度,減少此類現象發生。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54