基于GABP神經網絡的液壓互聯懸架建模研究
2022-07-11 00:01:44楊天宇鄭敏毅陳桐張農李杰
科學技術與工程 2022年16期
楊天宇, 鄭敏毅,2*, 陳桐, 張農, 李杰
(1.合肥工業大學汽車與交通工程學院, 合肥 230009; 2.合肥工業大學汽車工程技術研究院, 合肥 230009; 3.合肥工業大學機械工程學院, 合肥 230009)
隨著5G車聯網技術的快速發展,車輛需要實時準確的提供自身的各類數據,指導車輛底盤動力學控制,為駕駛員和乘客提供更好的體驗。懸架對改善車輛平順性和舒適性起重要作用,其作為一種復雜系統,具有高維的數學模型,是一個多輸入-多輸出的系統[1]。
人工神經網絡(artificial neural network,ANN)是一種基于大腦的神經功能而建立的處理信息系統,具有很好的自適應性、非線性以及記憶聯想性等特點[2]。因此,人工神經網絡成為解決復雜非線性系統建模的新途徑。學者們利用神經網絡對非線性系統建模開展了大量的研究[3- 4]。文獻[3]研究了非線性自回歸神經網絡建模的方法,建立了燃氣輪機神經網絡仿真模型,實驗結果表明該模型能夠反映燃氣輪機的外特性。文獻[4]提出了一種基于改進型深度學習的非線性建模方法, 并設計基于高斯徑向基函數的深度信念網絡(deep belief network,DBN)訓練模型,最后確立徑向基函數(radial basis function,RBF) 為DBN神經元的激活函數,設計一種基于RBF的DBN(RBF-DBN)應用于非線性系統建模中,實驗結果表明RBF-DBN預測精度較高,并且具有較好的收斂性。神經網絡在車輛系統中應用廣泛。文獻[5]以磁懸浮列車單點懸浮模型為基礎,結合RBF神經網絡和Lyapunov穩定性分析設計了自適應RBF神經網絡控制算法,并通過仿真對比驗證該控制算法的魯棒性和有效性。文獻[6]針對復雜環境下車輛主動前輪轉向系統的穩定性問題,提出一種基于徑向基神經網絡(radial basis function neural network,RBFNN)的主動前輪轉向自抗擾控制(auto disturbance rejection control,ADRC)方法,并通過仿真對比驗證了該方法改善了車輛的可控性和穩定性并具有良好的控制精度。
液壓互聯懸架是一種利用油液傳遞壓力、氣體為彈性介質的典型非線性系統[7]。其不僅具有常見油氣懸架的優點,而且在顛簸路面上行駛時,裝載液壓互聯懸架(hydraulically interconnected suspension,HIS)的車輛姿態仍能保持水平。HIS系統可以通過改變連通方式來滿足車輛對行駛狀態的要求,盡可能的消除車輛姿態失衡,提高車輛的操穩性以及平順性[8-10]。傳統的白盒建模方法雖然能夠揭示系統的物理規律,但是求解速度慢,非線性建模過程復雜,難以滿足智能技術對車輛建模的精度高,速度快的要求。因此,利用人工神經網絡黑盒建模方法建立液壓互聯懸架的數學模型成為了更好地選擇。
為此,采用基于遺傳算法(genetic algorithm,GA)的反向傳播(back propagation,BP)神經網絡算法建立液壓互聯懸架的數學模型,利用Simulink建立液壓互聯懸架模型,獲取網絡的訓練數據。利用遺傳算法的全局搜索能力來彌補BP神經網絡模型存在的易陷入局部極小值的缺點,優化網絡的初始權值和閾值。通過仿真對比驗證GABP方法的優點。搭建液壓互聯懸架測試臺架,利用實驗數據對比神經網絡訓練結果進行比較分析。
1 GABP建模方法
1.1 液壓互聯懸架模型
采用抗側傾液壓互聯懸架模型,如圖1所示,該系統具有兩條油路,左側的液壓缸上/下腔和右側的液壓缸下/上腔互聯,每個液壓缸的進油口處都裝置一個可調阻尼閥,每一條支路中裝有一個儲能器[9]。車輛側傾時,一條支路油壓上升,另一條支路壓力下降,形成壓力差從而產生抗側傾力矩[11]。
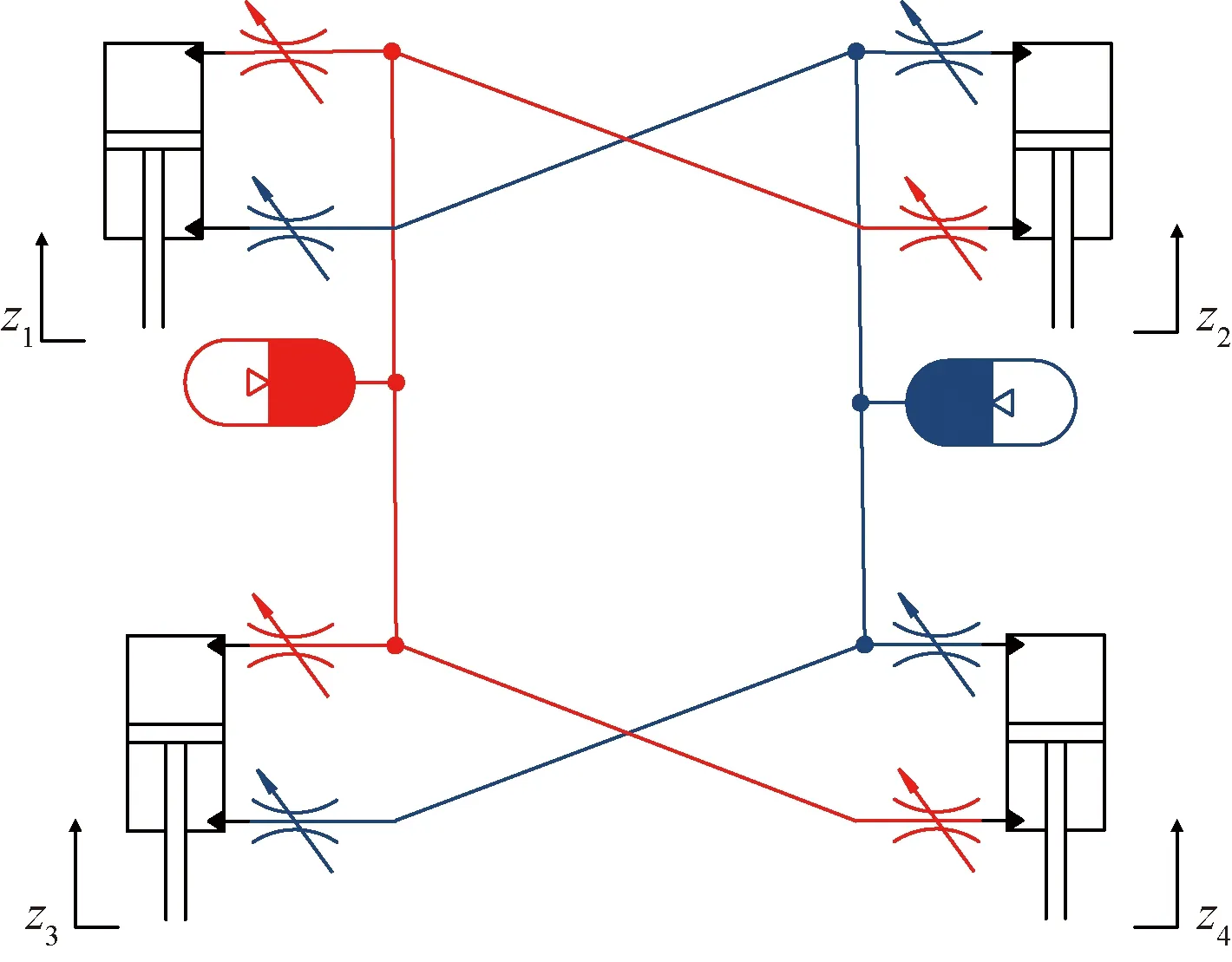
zi為各液壓缸的位移,i =1,2,3,4
對上述結構進行動力學機理分析,建立該液壓系統的各部件數學模型。液壓缸各腔的油壓與流量微分方程為

(1)
式(1)中:Pi為液壓缸各腔油壓;E為液壓油的有效體積模量;si為各液壓缸的高度;Ai為液壓缸腔內橫截面積;qi為各管路流量;zi為各液壓缸的位移;i=1,2,…,8。
根據理想氣體方程,建立蓄能器微分方程為
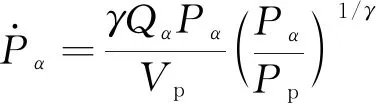
(2)
式(2)中:Pα為蓄能器中油壓;γ為氣體絕熱系數;Qα為進出蓄能器流量;Pp為氣體預充壓力;Vp為在預充壓力下腔內氣體體積。
選取薄壁孔阻尼閥,其數學模型為

(3)
式(3)中:Cqmax為最大節流系數;Re為臨界雷諾數;ρ為液壓油密度;λ為流數;Ad為阻尼孔橫截面積;ΔP為阻尼閥兩端的液壓油壓力差。
HIS系統參數如表1所示。
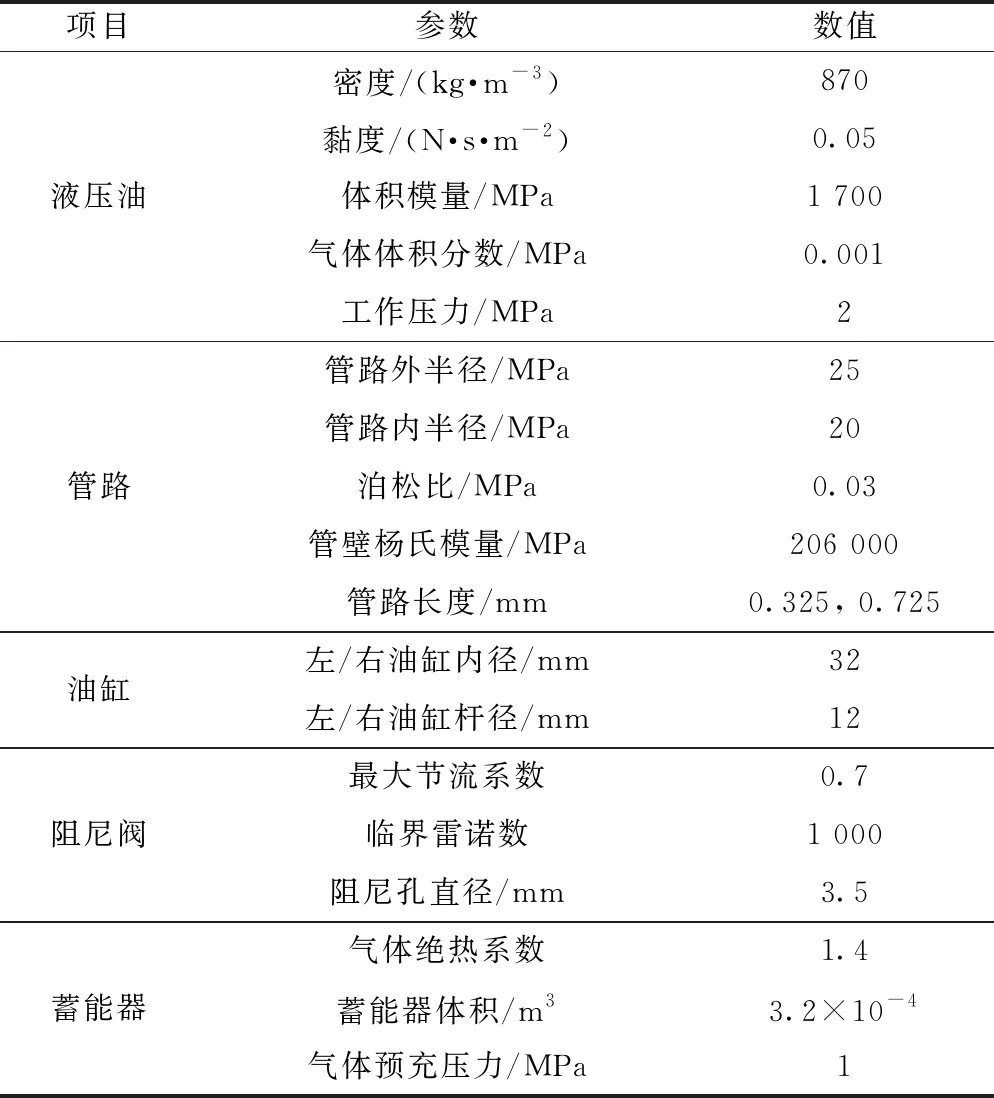
表1 HIS參數
1.2 基于遺傳算法的BP神經網絡
BP神經網絡是一種按照數據正向傳播,誤差逆向傳播的多層前饋式神經網絡[12]。正向傳播傳輸數據,逆向傳播傳輸誤差,由此調整神經元之間的權值矩陣,減小誤差[13]。參考的激活函數為單極性sigmoid函數,可表示為

(4)
式(4)中:w為輸入層與隱含層、隱含層與輸出層之間的權重;θ為偏差;X為神經元輸入向量。
遺傳算法是一種模仿自然界的遺傳機制的隨機全局搜索算法,是一種高效、并行和全局搜索的算法[14]。利用遺傳算法優化BP神經網絡初始條件,既能夠彌補BP神經網絡陷入局部最優解的缺點,又能夠優化初始權值和閾值,提高預測準確性[14-15]。
基于遺傳算法優化的BP神經網絡流程如圖2所示,具體步驟如下。
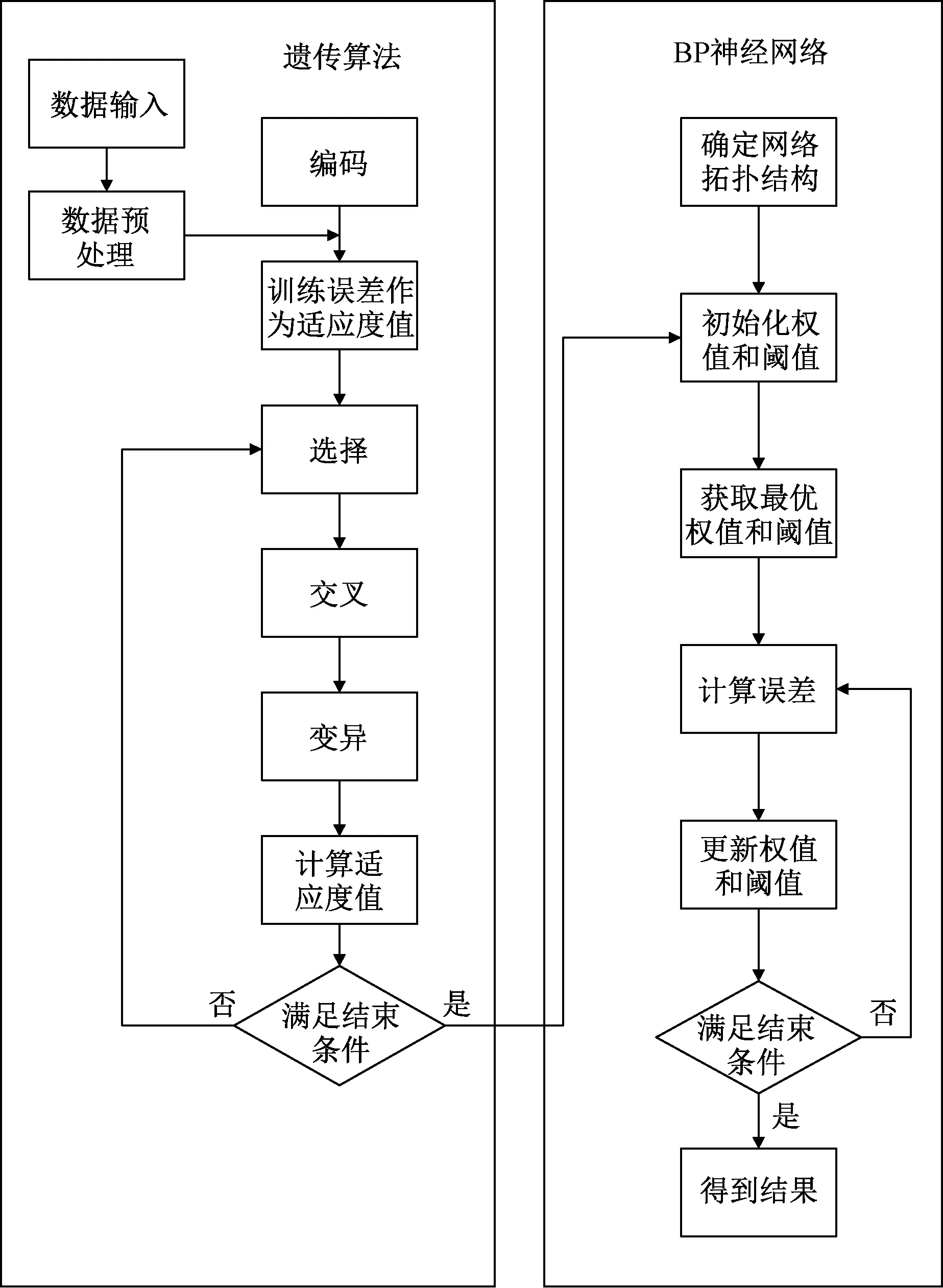
圖2 遺傳算法優化的BP神經網絡流程圖
步驟1初始化種群。采用格雷碼編碼,種群中的染色體組成包含網絡中各層之間的權值和閾值。
步驟2采用均方根誤差(root mean square error,RMSE)作為適應度函數,計算每一個染色體的適應度,計算公式為

(5)
式(5)中:N為總數據集容量;f(i)為第i個數據樣本的預測值;y(i)為第i個數據樣本的實際值。
步驟3選擇操作。采取隨機遍歷抽樣法作為選擇策略。選擇算子計算公式為
(6)
式(6)中:f(xi)為個體xi的適應度值;F(xi)為此個體被選擇的概率。
步驟4交叉操作。隨機選擇兩個個體按照一定頻率進行交叉。個體Pa和Pb在第k個點位進行交叉,其交叉算子可表示為
(7)
式(7)中:α為介于(0,1)的隨機數。
步驟5變異操作。隨機選擇一個個體按照一定概率進行變異操作。個體Pa在第k個點位變異,變異算子可表示為

(8)
式(8)中:Pmax為個體上界;Pmin為個體下界;v為當前迭代次數;Vmax為最大進化次數;μ為介于(0,1)的隨機數。
步驟6重插入操作。從種群中挑選出適應度強的個體,保留父代中適應度值前10%的個體,重插入新子代中。
步驟7按順序拆分最優個體,整合為BP神經網絡的權值和閾值,調整網絡參數,重復學習訓練,直至達到所需精度或學習次數的上限為止。
1.3 HIS-GABP算法流程
算法流程如下:①在Simulink上建立HIS懸架物理模型;②設計輸入數據;③仿真獲得輸出數據;④構建BP神經網絡;⑤遺傳算法優化網絡的權值和閾值,訓練BP神經網絡。
HIS系統的輸入是懸架的動行程,即4個液壓缸位移輸入和速度輸入。考慮垂向振動,側傾,俯仰,扭曲4種模態,使用正弦函數作為速度輸入函數,其表達式為
vins=Asin2πft
(9)
式(9)中:vins為某一油缸的控制桿瞬時速度;A為某一油缸的控制桿速度幅值;f為某一油缸的控制桿運動頻率。
設計參數如表2所示,規定4個油缸的控制桿起始位置均在油缸的工作行程的中間位置。
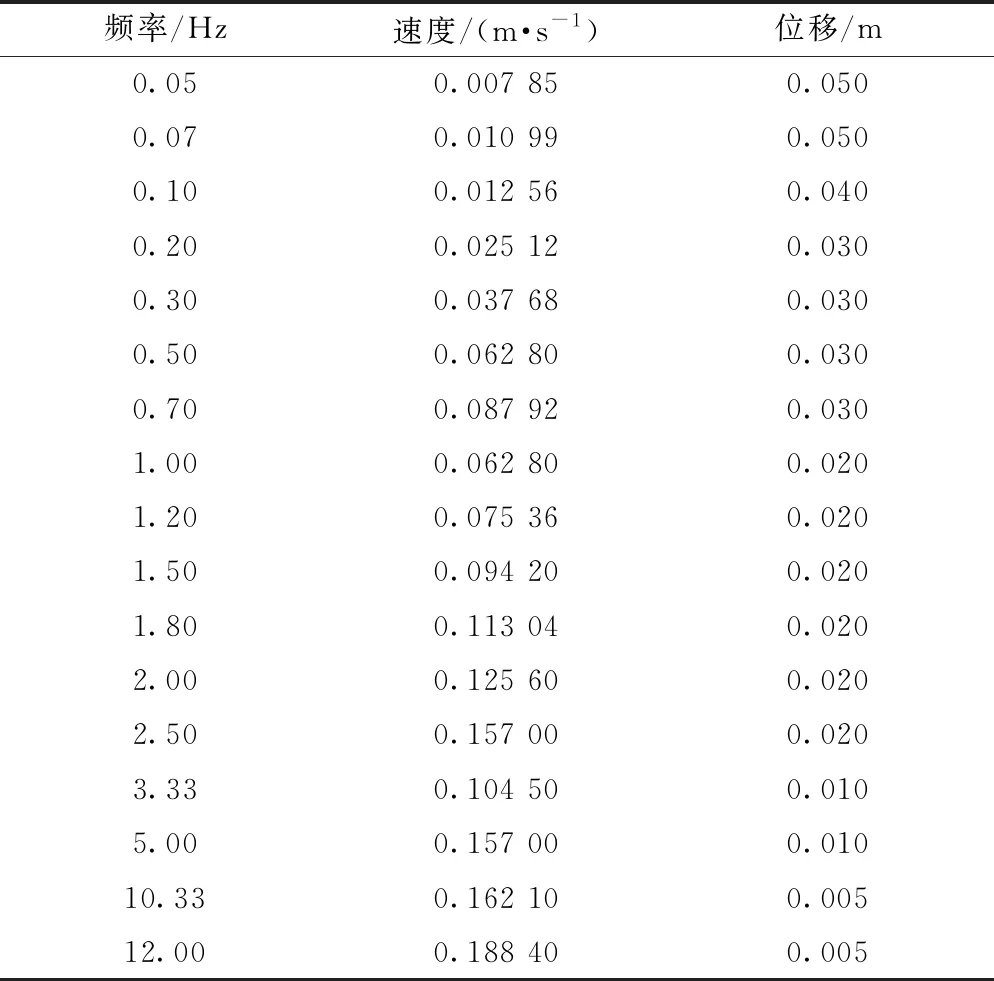
表2 HIS系統輸入參數
輸入數據包含4個缸的位移輸入和速度輸入,共計8種數據。輸出數據包含4個油缸的上下腔油壓和兩個蓄能器的油壓,共計10種數據。為保證網絡收斂,對數據進行歸一化,可表示為
(10)
式(10)中:Qmax為數據組中最大值;Qmin為數據組中最小值;Qi為歸一化前數據值;Qnormal為歸一化后數據值。
將數據組分為輸入組和輸出組,其中輸入組可表示為
INPUT={VLF,VLR,VRF,VRR,XLF,XLR,XRF,XRR}
(11)
式(11)中:VLF為左前輪的速度輸入;VLR為左后輪的速度輸入;VRF為右前輪的速度輸入;VRR為右后輪的速度輸入;XLF為左前輪的位移輸入;XLR為左后輪的位移輸入;XRF為右前輪的位移輸入;XRR為右后輪的位移輸入。
輸出組可表示為
OUTPUT={P11,P12,P21,P22,P31,P32,P41,P42,PACC1,PACC2}
(12)
式(12)中:P11、P12分別為左前位置油缸的上下腔油壓;P21、P22分別為左后位置油缸的上下腔油壓;P31、P32分別為右前位置油缸的上下腔油壓;P41、P42分別為右后位置油缸的上下腔油壓;PACC1、PACC2分別為2個蓄能器的油壓。
綜上BP神經網絡拓撲結構如圖3所示。網絡的訓練參數如表3所示。
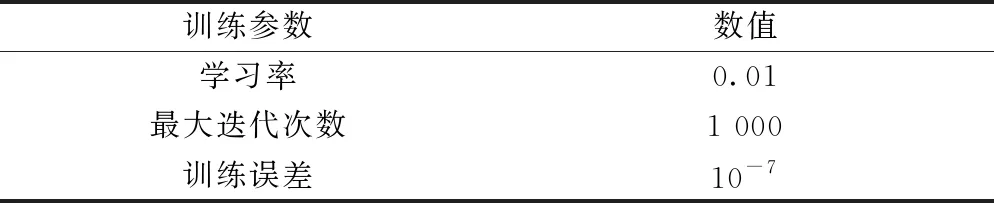
表3 BP神經網絡訓練參數
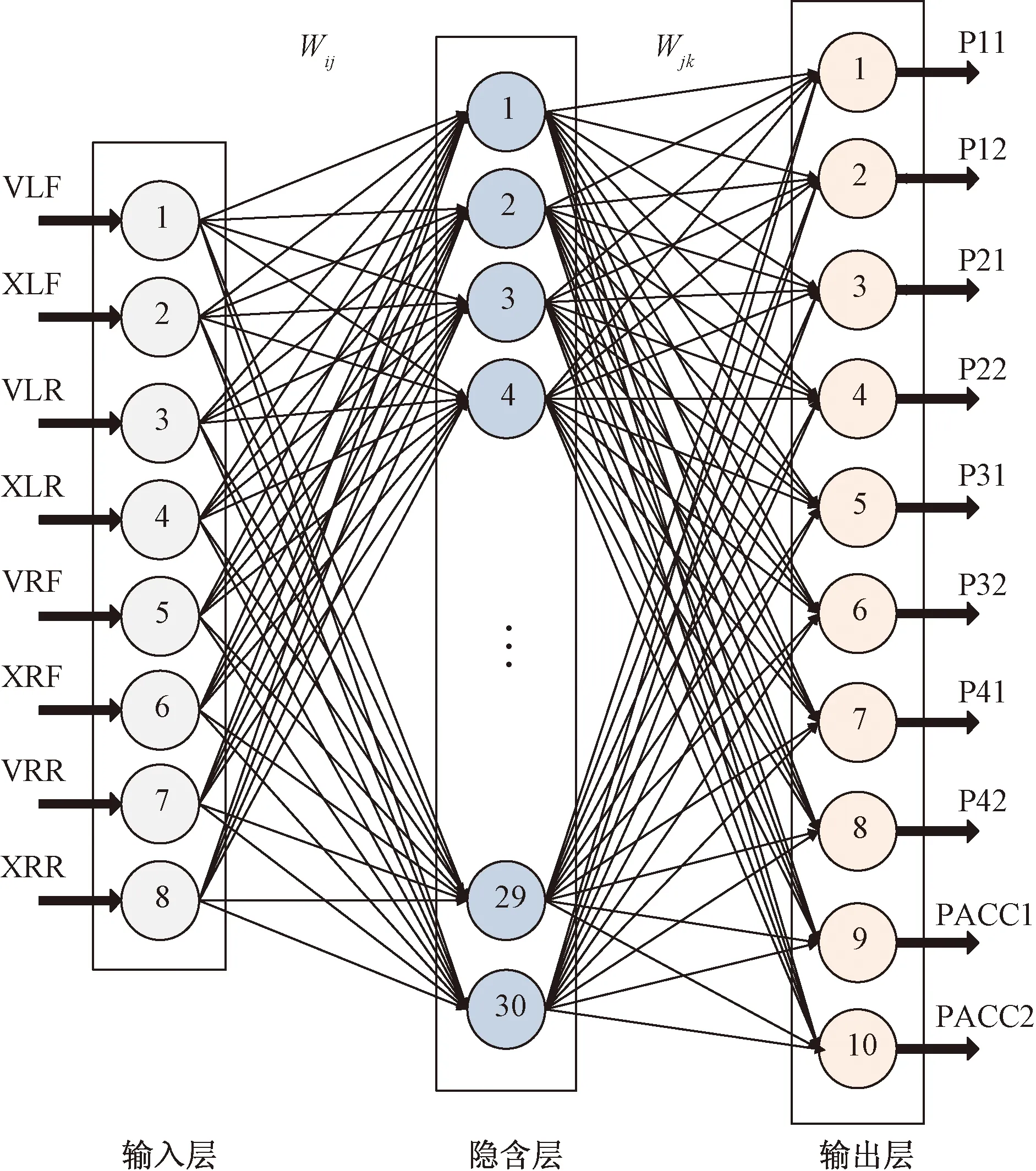
Wij為輸入層與隱含層之間的權值;Wjk為隱含層與輸入層之間的權值
BP神經網絡中共有540個權值,40個閾值,以580個網絡的閾值和權值作為優化目標,遺傳算法優化參數如表4所示。每代最優解和均值的均方根誤差變化曲線如圖4所示。可以看出,種群進化到150代時均方根誤差基本無變化,進化達到最佳。
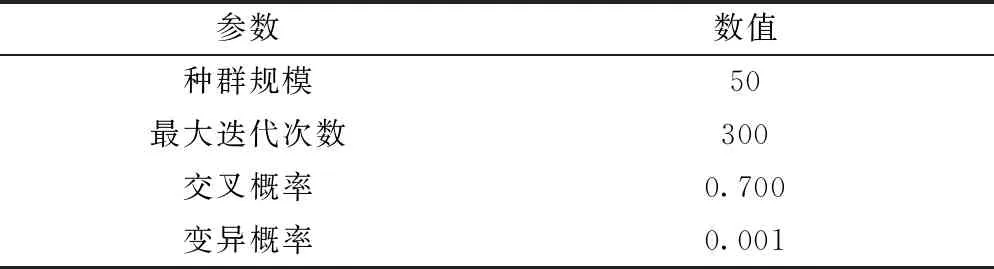
表4 遺傳算法優化參數
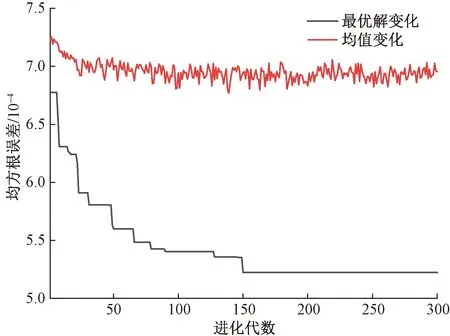
圖4 每代最優解與均值的均方根誤差變化曲線
1.4 仿真對比驗證
在Simulink環境下,采用四階龍格-貝塔求解器求解,在不同的定步長下,其蓄能器油壓變化的仿真結果如圖5所示。圖5(a) 中,對HIS系統施加0.1 Hz、40 mm的激勵,求解器步長設置為1×10-3,可以看出,蓄能器油壓變化沒有規律,仿真失真,更無法體現HIS系統特性,這是由于仿真過程出現剛性問題。圖 5(b) 中,采用相同激勵,步長設置為1×10-4,可以看到蓄能器油壓變化具有非線性特性,能夠體現HIS系統特性。由此得出結論,在大步長的低精度下,HIS系統仿真會失真;在小步長的高精度下,HIS系統仿真體現出非線性,且精度越高,仿真細節越詳細。但精度的提高必然會導致速度的下降。因此,運用機理分析法建立HIS系統模型存在建模精度和速度不可兼得的缺點。
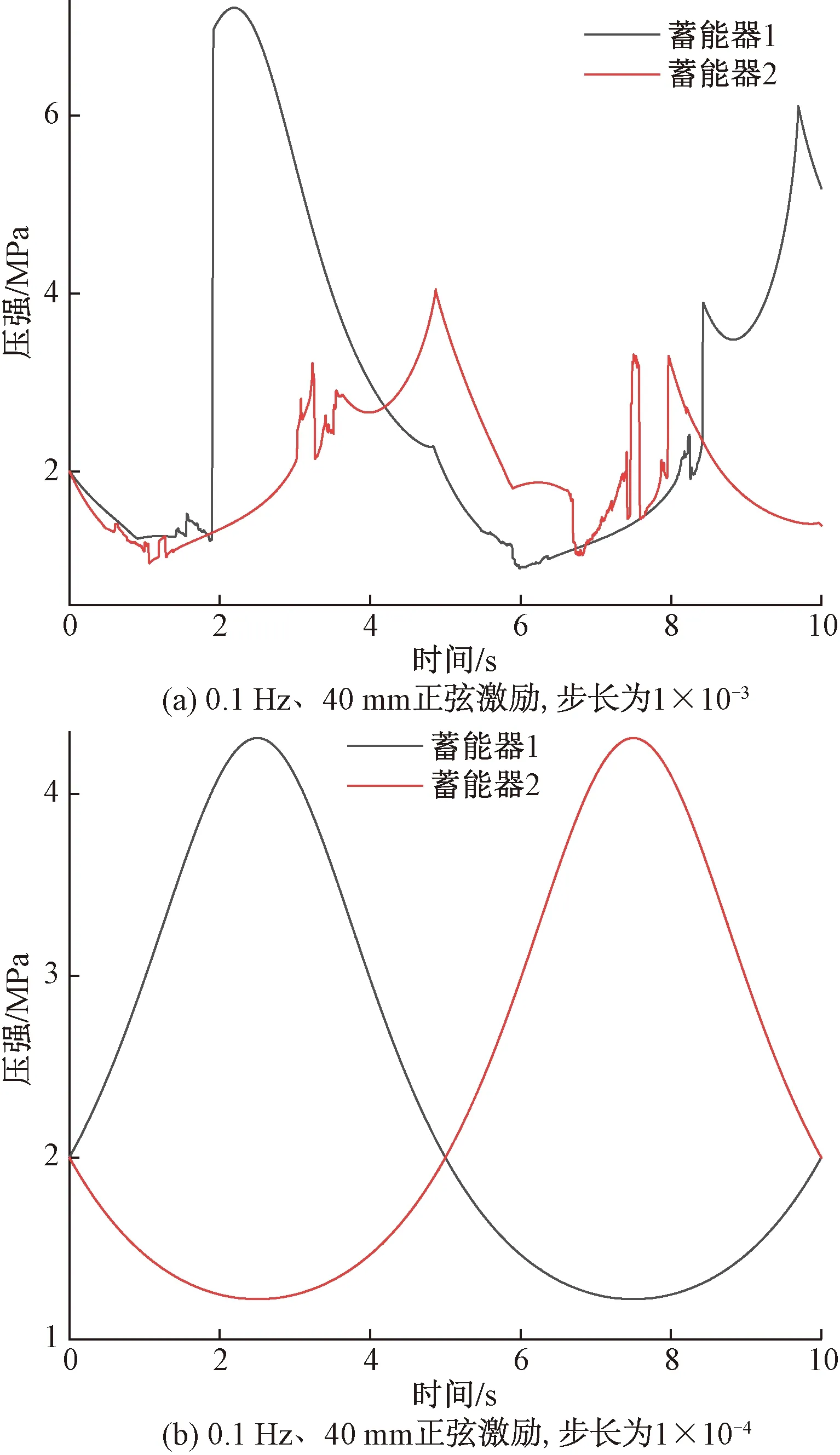
圖5 不同步長下蓄能器油壓變化
圖6給出了在0.1 Hz、40 mm的正弦激勵下,通過機理建模仿真獲得的蓄能器油壓與通過GABP網絡建模形式獲取蓄能器油壓變化對比。可以看出,兩種建模方式之間最大絕對誤差為0.038 4 MPa,相對誤差百分數為1.26%,兩類曲線變化趨勢一致,均能體現HIS系統的非線性。綜上,在精度方面,GABP建模方法與機理建模方法幾乎相同,在速度方面GABP方法明顯快于機理建模方法,因此GABP建模方法兼具建模精度高且建模速度快的特點。
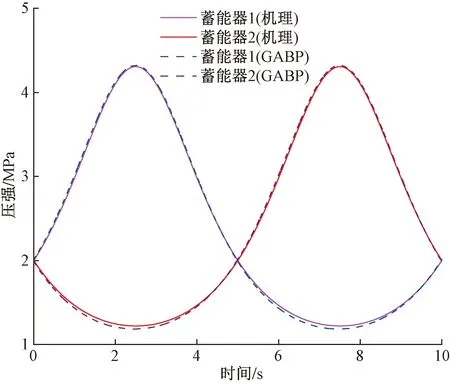
圖6 兩種建模方式下蓄能器油壓變化對比
2 實驗分析
首先設計多模態實驗獲取實際輸出。然后通過實驗數據比較分析HIS的神經網絡模型的輸出精度。
2.1 實驗裝置說明
液壓互聯懸架測試臺架如圖7所示。在HIS測試臺架上,FPGA控制器(NI-myRIO1 900)控制4個電機的位移,同時FPGA控制器(CRIO-9 068)獲取油壓,力和位移的傳感器信號。左右油缸的頂部安裝在基礎框架上,桿由電機驅動,模擬車輛懸架的動行程。
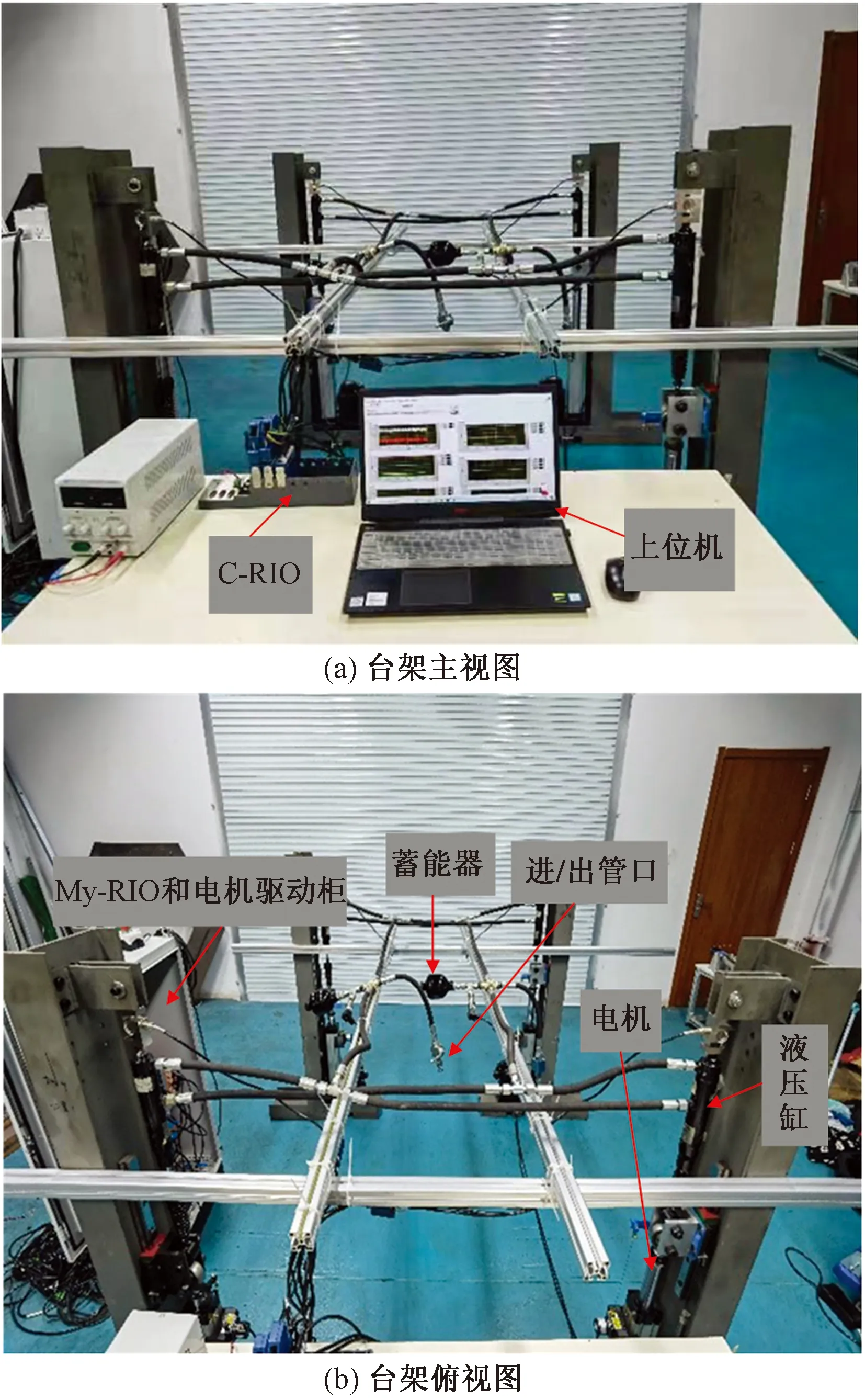
圖7 HIS測試臺架
為實時收集數據,在油缸的頂部安裝力傳感器。在蓄能器的尾部安裝油壓傳感器,在電機一側安裝拉線位移傳感器,安裝位置如圖8所示。
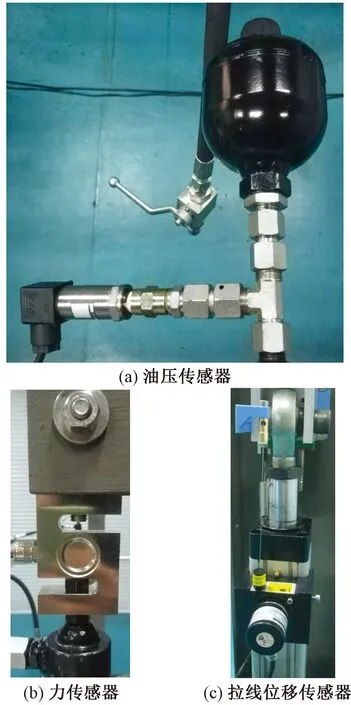
圖8 傳感器安裝位置
2.2 多模態實驗
本實驗針對垂向和側傾兩個模態進行實驗。具體如下。
(1)進行垂向模態變形下的加載試驗。實驗中加載形式采用正弦激勵。加載不同的頻率和運動幅值代表懸架不同的動行程。每組的頻率和幅值參數如表5所示。
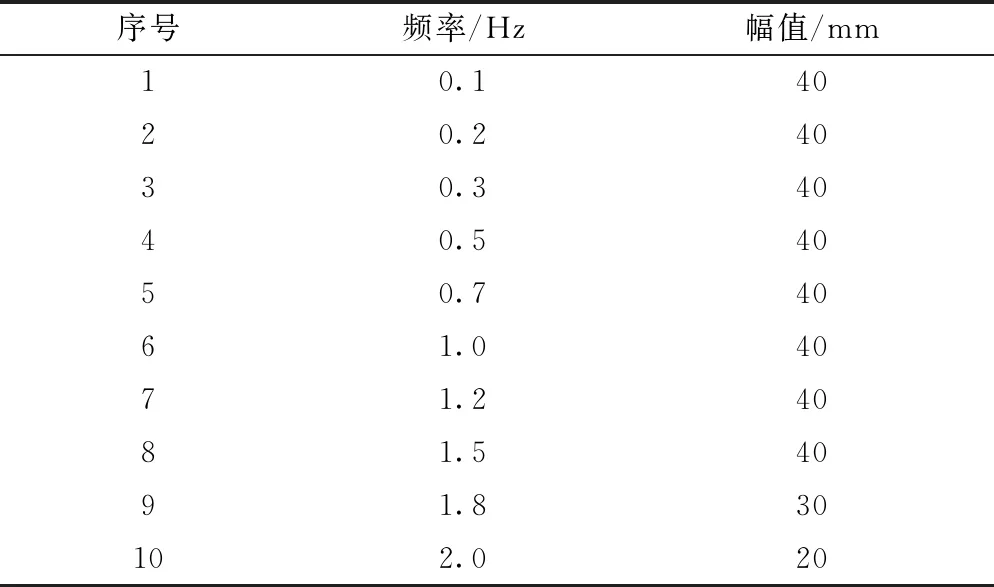
表5 垂向模態組實驗參數
(2)進行側傾模態變形下的加載實驗。實驗參數如表6所示。考慮實驗安全性,側傾模態實驗組的幅值小于垂向模態幅值。
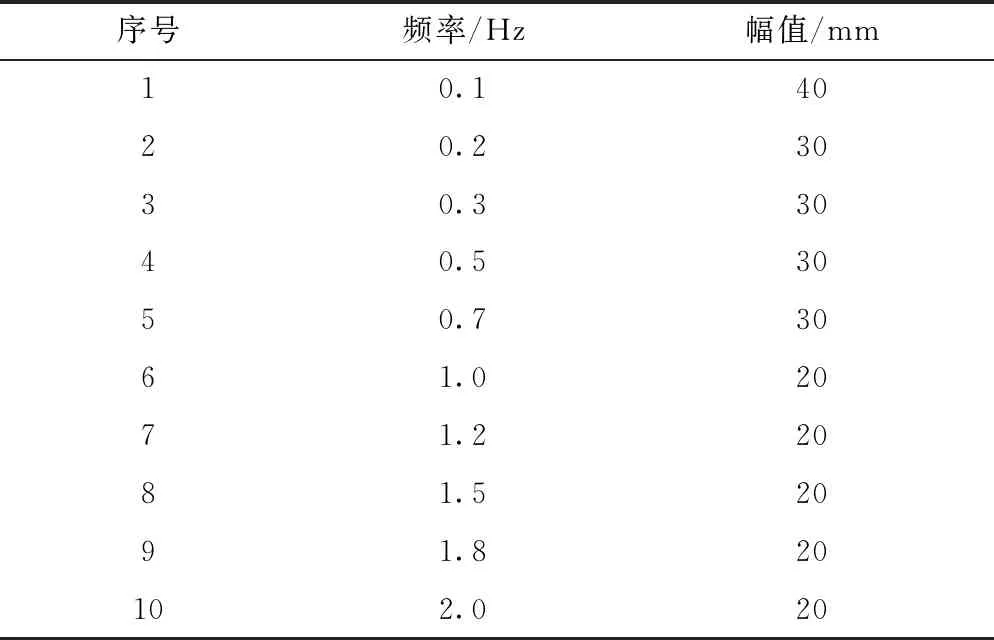
表6 側傾模態組實驗參數
2.3 神經網絡模型與實驗結果比較分析
2.3.1 垂向模態實驗組
圖9給出了垂向模態下,各頻率下神經網絡模型與實際系統的絕對誤差(mean absolute error,MAE)和均方根誤差(root mean square error,RMSE)。均方根誤差已由式(5)給出,絕對誤差計算公式為

(13)
式(13)中:f(i)為第i時刻由實驗所得的實際值;y(i)為第i時刻神經網絡仿真所得的預測值。
MAE值越小,說明神經網絡模型越接近實際模型。RMSE值越小,說明網絡中有越少的異常值,網絡的魯棒性越強。由圖9分析可知,增大激勵頻率會導致RMSE和MAE下降,即模型的精確度隨頻率上升而上升。
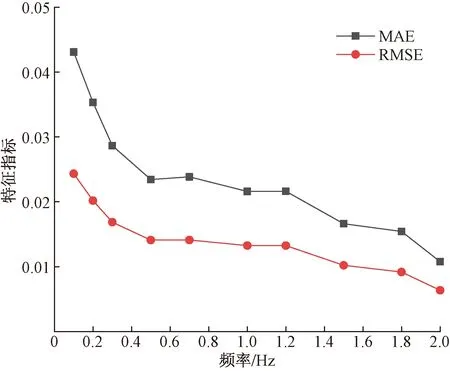
圖9 垂向模態組各頻率特征指標
為研究各頻段對網絡輸出精度的具體影響以及誤差原因,選取3組實驗組數據分析,按照頻率大小劃分為低頻組,中頻組和高頻組。詳細分組如表7所示。
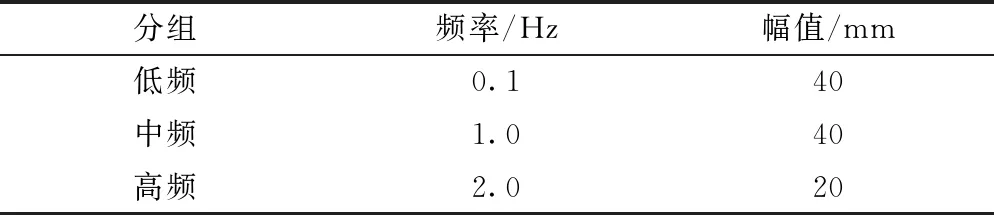
表7 垂向模態組數據分組
圖10給出低、中、高頻下蓄能器實際油壓和神經網絡仿真輸出的油壓變化。圖10(a) 中最大相對誤差為0.079 1 MPa,相對誤差百分數為4.12%,圖10(b) 中最大相對誤差為0.042 6 MPa,相對誤差百分數為2.27%,圖10(c) 中最大相對誤差為0.029 3 MPa,相對誤差為1.51%。在3個頻率下,神經網絡輸出與實際輸出曲線走勢相同,說明垂向模態下GABP體現出了HIS的非線性。兩條曲線沒有相位偏移,說明GABP的輸出沒有提前或滯后,具有實時性。網絡仿真輸出誤差小于5%,說明在垂
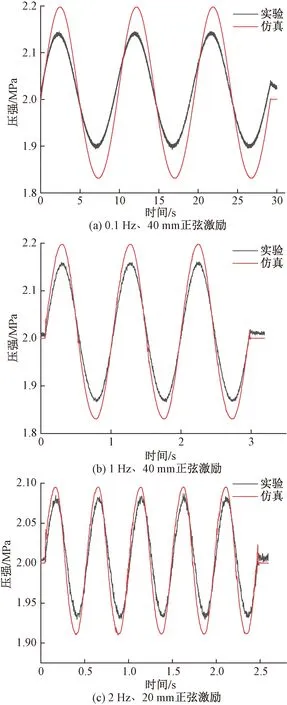
圖10 垂向模態下蓄能器油壓變化對比
向模態下GABP建模具有很好的精確度。3個頻率下網絡輸出均高于實驗輸出,主要原因有:①實驗方面,HIS系統存在內泄,液壓缸推桿與內壁存在間隙,不能保證上下腔完美的隔離;②仿真方面,訓練網絡的模型參數不準,液壓缸內徑,推桿直徑,管路液阻不可測量,對訓練結果有影響。
2.3.2 側傾模態實驗組
圖11給出了側傾模態下,各頻率下神經網絡模型與實際系統的絕對誤差和均方根誤差。分析可知,側傾模態下,兩個特征指標變化較大,在低頻段誤差較大,神經網絡模型精度差。由低頻過渡到中頻過程中,RMSE和MAE數值陡降,說明模型精度在中頻段得到改善。高頻段下,RMSE和MAE數值基本未變,模型精度在高頻段穩定。
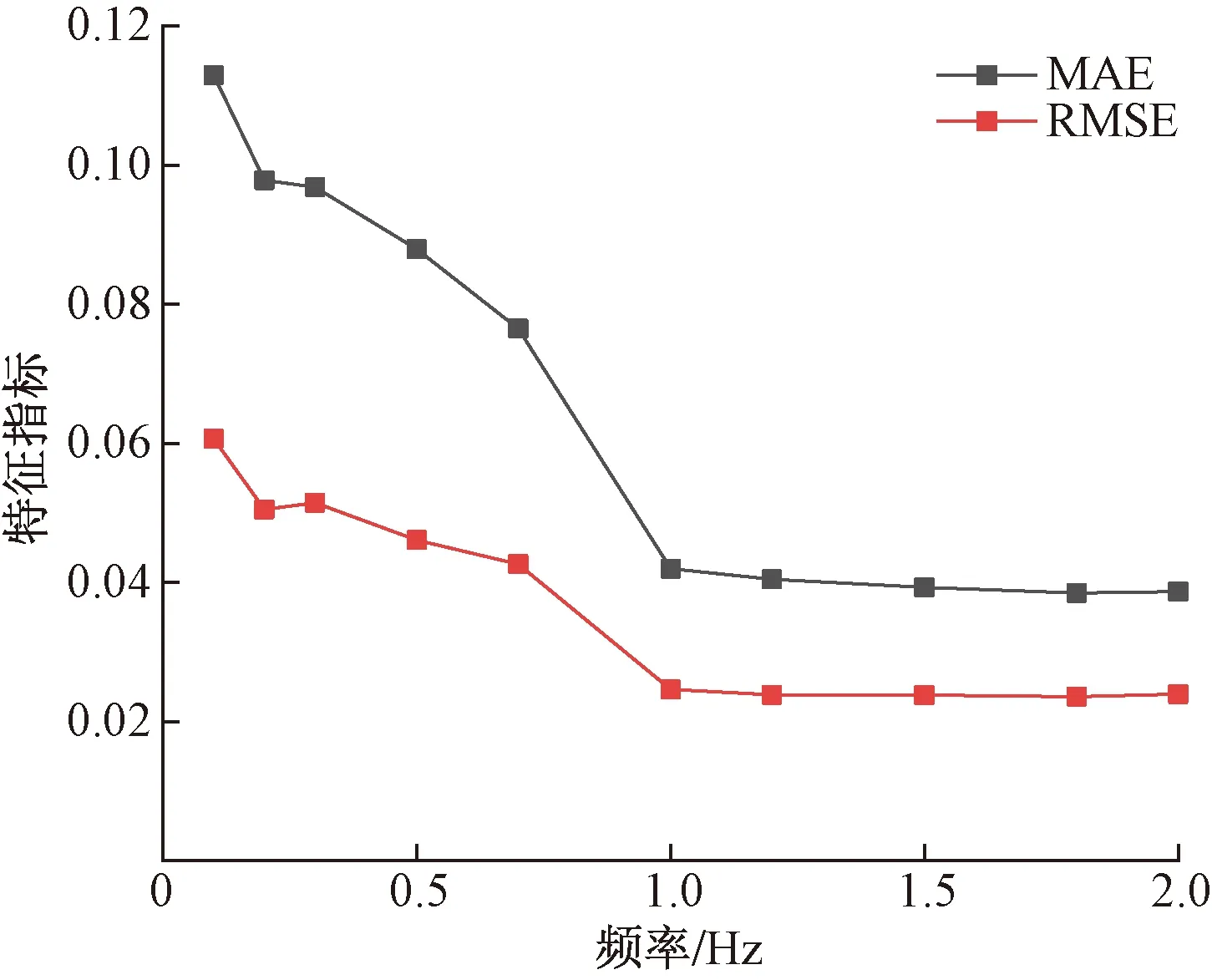
圖11 側傾模態組各頻率特征指標
為研究各頻段對網絡輸出精度的具體影響以及誤差原因,選取3組實驗組數據分析,按照頻率大小劃分為低頻組,中頻組和高頻組。詳細分組如表8所示。
表8 側傾模態組數據分組
蓄能器油壓變化如圖12所示。圖12(a) 中最大相對誤差為0.165 4 MPa,相對誤差百分數為7.64%,圖12(b) 中最大相對誤差為0.116 5 MPa,相對誤差百分數為4.07%,圖12(c) 中最大相對誤差為0.127 0 MPa,相對誤差為4.35%。3個頻率下的神經網絡輸出與實際輸出曲線走勢相同,說明側傾模態下GABP體現出了HIS的非線性。兩條曲線沒有相位偏移,說明GABP的輸出沒有提前或滯后,具有實時性。網絡仿真輸出相對誤差小于10%,說明在側傾模態下GABP建模具有較好的精確度。相較于垂向模態,側傾模態下GABP的精度較差,說明HIS兩條油路工作壓力差越大,GABP的精度越差。在高頻段模型的誤差穩定,說明存在系統誤差。
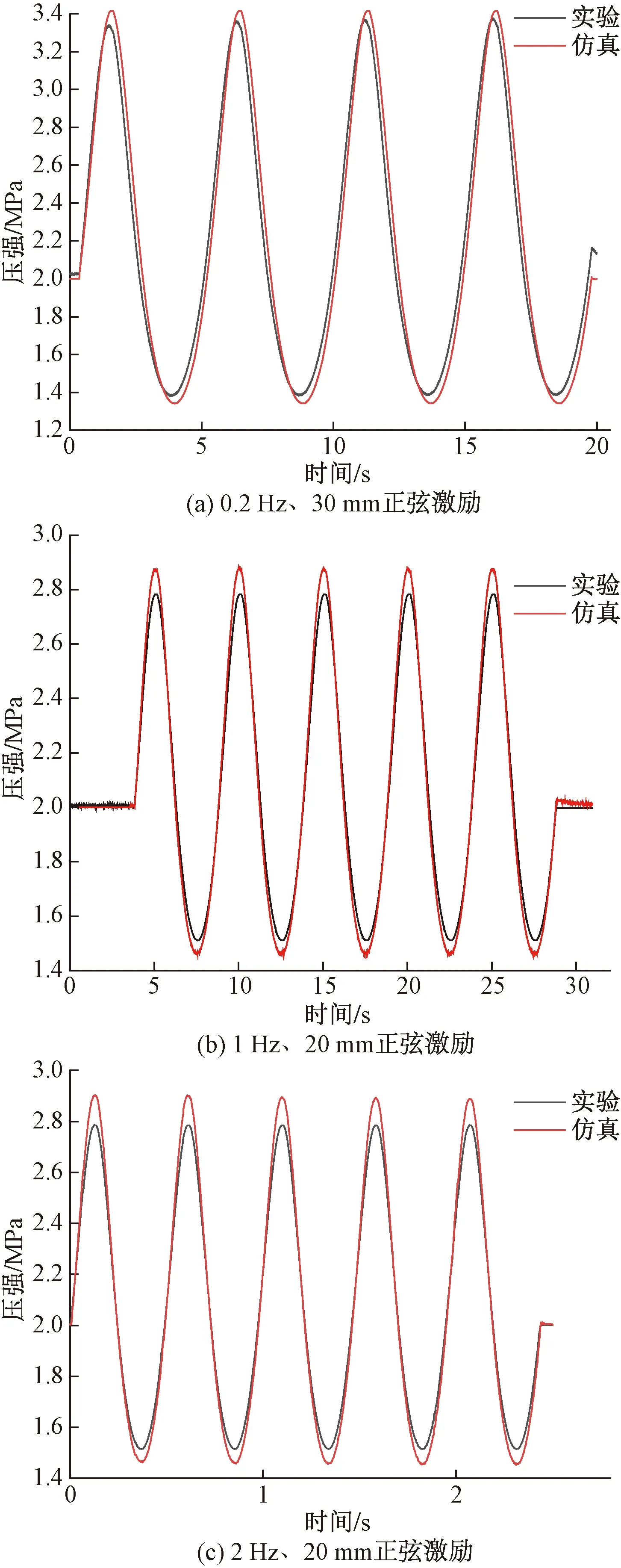
圖12 側傾模態下蓄能器油壓變化
產生較大誤差的主要原因有:①仿真方面,訓練網絡的模型參數不準確是主因,工作壓力差越大,問題越明顯;②實驗方面,在低頻高幅條件下,液壓缸產生較大的力導致臺架產生松動,對實驗結果有干擾;隨著頻率和幅值的下降,臺架穩定,誤差也快速下降;③實驗系統存在內泄,導致實際壓力峰值與網絡輸出峰值有差值。
2.3.3 綜合分析
綜合兩組實驗分析可知:①GABP網絡輸出曲線較好的體現了HIS的非線性;②GABP曲線與實際輸出曲線無相位偏移,具有實時性;③垂向模態下GABP輸出與實際輸出相對誤差均小于5%,精度高。側傾模態下相對誤差均小于10%,精度較高。GABP輸出精度與激勵的頻率和幅值有關,頻率越小,幅值越大,模型精度越差,反之精度越高。綜上,HIS-GABP建模方法具有良好的精度,能夠體現系統的非線性,且計算速度快,輸出與實際對比無相位偏移,具有實時性,該方法具有可行性。
3 結論
提出了一種基于遺傳算法優化的BP神經網絡建立HIS系統模型的方法,并介紹了原理和建模過程,并通過仿真對比驗證GABP方法的優點。之后,利用臺架實驗所獲得的數據與網絡仿真所得數據進行比較分析。最終,利用多種評價指標評價網絡,與實際數據繪制而成的曲線進行比較分析,得出如下結論。
(1)GABP網絡輸出的精度與激勵的頻率和幅值相關,頻率越小,幅值越大,模型精度越差,反之精度越高。
(2)網絡輸出曲線軌跡趨勢體現了HIS的非線性。
(3)網絡曲線與實際曲線無相位偏移,具有實時性。
(4)垂向模態下GABP輸出與實際輸出相對誤差均小于5%,側傾模態下相對誤差均小于10%,具有較好的精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
核科學與工程(2015年4期)2015-09-26 11:59:03
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
