中低速磁浮簡(jiǎn)支箱梁車(chē)橋耦合動(dòng)力響應(yīng)
2022-07-12 04:08:30鄭曉龍楊吉忠徐昕宇楊國(guó)靜宋曉東陳星宇
鐵道標(biāo)準(zhǔn)設(shè)計(jì) 2022年7期
鄭曉龍,楊吉忠,徐昕宇,楊國(guó)靜,宋曉東,陳星宇
(中鐵二院工程集團(tuán)有限責(zé)任公司,成都 610031)
引言
我國(guó)中低速磁浮軌道交通還處于發(fā)展中的新型城市軌道交通制式,通過(guò)電磁懸浮支撐和導(dǎo)向,沒(méi)有傳統(tǒng)輪軌接觸造成的振動(dòng)和噪聲,相對(duì)速度高、能效高,在近距離中小運(yùn)量領(lǐng)域其綜合性?xún)r(jià)比相對(duì)于輪軌制式具有明顯優(yōu)點(diǎn),已有多個(gè)城市在規(guī)劃該種制式交通。中低速磁浮列車(chē)通常采用不超過(guò)3輛編組,最高運(yùn)行速度可達(dá)80~120 km/h[1]。2005年3月,日本東部丘陵線(8.9 km)作為全球首條商業(yè)運(yùn)營(yíng)線開(kāi)始載客運(yùn)營(yíng),證明這種制式交通在城市中緩解交通壓力的優(yōu)勢(shì);2016年5月,連接長(zhǎng)沙機(jī)場(chǎng)至長(zhǎng)沙南站的長(zhǎng)沙磁浮快線作為我國(guó)第一條中低速磁浮運(yùn)營(yíng)線開(kāi)通,最高運(yùn)行速度達(dá)到100 km/h,該線良好的運(yùn)營(yíng)效率也使得在2019年底已開(kāi)始規(guī)劃延長(zhǎng)線。從2016年開(kāi)始,我國(guó)相關(guān)單位正式啟動(dòng)高速磁浮軌道交通工程系統(tǒng)項(xiàng)目,研發(fā)的高速磁浮列車(chē)采用基于常導(dǎo)磁浮磁鐵和控制技術(shù),長(zhǎng)定子直線電機(jī)雙側(cè)牽引,最高運(yùn)行速度可達(dá)600 km/h及以上[2],配套土建基礎(chǔ)設(shè)施也在相應(yīng)設(shè)計(jì)研發(fā)之中。
從國(guó)內(nèi)已建成的上海高速磁浮和長(zhǎng)沙中低速磁浮線測(cè)試結(jié)果看,軌道梁均存在一定程度的車(chē)致振動(dòng)問(wèn)題[3-8]。隨著磁浮制式交通的系列推進(jìn)和工程落地,研究學(xué)者也開(kāi)展了一些磁浮動(dòng)力行為的現(xiàn)場(chǎng)實(shí)測(cè)和數(shù)值模擬。LI等[9-10]開(kāi)展長(zhǎng)沙磁浮快線的動(dòng)載試驗(yàn),并建立了豎向耦合振動(dòng)模型進(jìn)行對(duì)比、分析兩種橋梁的響應(yīng)區(qū)別;梁瀟等[11]以長(zhǎng)沙磁浮快線為對(duì)象,開(kāi)展了100~160 km/h的提速模擬分析;蔡文鋒等[12]研究了磁浮新型懸浮結(jié)構(gòu)對(duì)中低速磁浮列車(chē)提速運(yùn)行的穩(wěn)定性問(wèn)題,并優(yōu)化了二系懸掛參數(shù);LI等[13]通過(guò)現(xiàn)場(chǎng)測(cè)試了中低速磁浮橋梁的自振特性,對(duì)修正后的橋梁模型進(jìn)行車(chē)-軌-橋仿真分析,研究了列車(chē)速度對(duì)系統(tǒng)位移和加速度的影響。
以國(guó)內(nèi)某中低速磁浮試驗(yàn)線設(shè)計(jì)的20 m跨度簡(jiǎn)支箱梁為例,采用通用有限元軟件Midas建立橋梁三維有限元模型,計(jì)算并分析其梁體固有頻率。在多體動(dòng)力學(xué)軟件UM中模擬磁浮列車(chē)以10~80 m/h速度通過(guò)橋梁,獲取了墩梁體系及列車(chē)的豎向動(dòng)力響應(yīng)。根據(jù)評(píng)價(jià)指標(biāo)對(duì)列車(chē)在梁上的走行性能進(jìn)行分析評(píng)價(jià),研究該簡(jiǎn)支梁動(dòng)力性能,并為今后高速磁浮軌道梁的車(chē)橋動(dòng)力仿真提供參考,指導(dǎo)橋梁設(shè)計(jì)。
1 試驗(yàn)線工程概況

圖1 試驗(yàn)線概況
試驗(yàn)線位于某列車(chē)廠廠區(qū)內(nèi)(圖1),全長(zhǎng)1.573 km,線路在橋梁上最大坡度70‰,列車(chē)在正線上最高運(yùn)行速度為100 km/h,列車(chē)采用3輛編組,列車(chē)長(zhǎng)度16.34 m+15.6 m+16.34 m(鉤到鉤長(zhǎng)),軌距1.86 m,滿(mǎn)載工況下單節(jié)車(chē)質(zhì)量不超過(guò)30 t,能滿(mǎn)足列車(chē)出廠前的組裝、靜動(dòng)態(tài)調(diào)試等需求。
軌道梁為F軌的承載體,采用預(yù)應(yīng)力混凝土箱梁,梁體全長(zhǎng)19.9 m,計(jì)算跨度19.3 m,截面形式如圖2所示,頂板寬1.5 m,箱體寬1.13 m,梁高1.55 m,頂板、腹板和底板厚均為0.22 m,橫橋向支座中心距1.5 m。橋梁為簡(jiǎn)支梁布置形式。

圖2 軌道梁截面(單位:mm)
2 車(chē)橋動(dòng)力分析模型
磁浮軌道系統(tǒng)中車(chē)橋動(dòng)力分析模型的列車(chē)模塊采用多體動(dòng)力學(xué)軟件進(jìn)行建模和編組,橋梁和橋墩模塊在通用有限元軟件中建立,電磁鐵及列車(chē)的懸浮控制模塊可在列車(chē)建模時(shí)考慮,也可采用外掛程序編好再導(dǎo)入列車(chē)模塊;聯(lián)合仿真時(shí),4個(gè)模塊按磁軌相互作用組合并在軌道上加入不平順激勵(lì),如圖3所示。
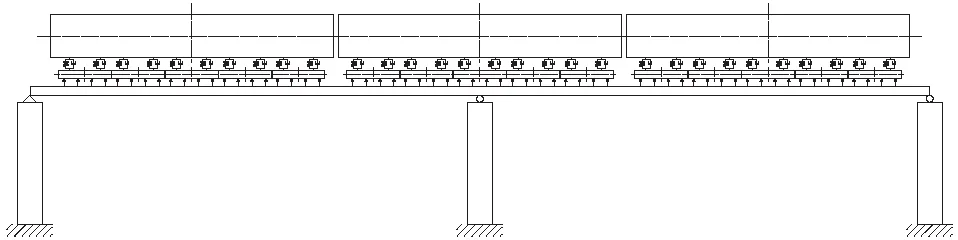
圖3 磁浮軌道系統(tǒng)車(chē)橋仿真模型
各分塊模型建立后,按多體動(dòng)力學(xué)、電磁場(chǎng)理論和經(jīng)典PD控制理論方法,列車(chē)以多剛體形式、橋梁模型以柔性體形式將其剛度和模態(tài)信息導(dǎo)入多體動(dòng)力學(xué)軟件,以車(chē)體懸浮架與F軌之間的主動(dòng)控制力為相互反饋?zhàn)饔玫年P(guān)聯(lián),將車(chē)、橋、電磁場(chǎng)作為相互關(guān)聯(lián)耦合體系,采用模態(tài)綜合技術(shù)法求解磁浮軌道列車(chē)以各速度通過(guò)橋梁過(guò)程的動(dòng)力響應(yīng)[14-15]。
2.1 列車(chē)模型
根據(jù)磁浮列車(chē)的基本結(jié)構(gòu)拓?fù)潢P(guān)系建立車(chē)體模型,模型中每節(jié)車(chē)體含有5個(gè)電磁轉(zhuǎn)向架,每個(gè)轉(zhuǎn)向架的左右兩側(cè)懸浮構(gòu)架構(gòu)成一個(gè)整體模塊,區(qū)別于傳統(tǒng)輪軌制式構(gòu)架,不考慮其側(cè)滾運(yùn)動(dòng),每個(gè)懸浮模塊含4個(gè)電磁鐵,電磁鐵系統(tǒng)通過(guò)懸浮控制器控制該模塊懸浮架與F軌之間的懸浮間隙,轉(zhuǎn)向架和車(chē)體之間的連接結(jié)構(gòu)采用空氣彈簧,將磁浮列車(chē)組合成在磁浮軌道結(jié)構(gòu)上運(yùn)行的多剛體系統(tǒng),考慮車(chē)體與懸浮架質(zhì)量、點(diǎn)頭慣量、空氣彈簧的剛度和阻尼。單節(jié)車(chē)包含車(chē)體及5個(gè)轉(zhuǎn)向架的沉浮和點(diǎn)頭運(yùn)動(dòng),共12個(gè)運(yùn)動(dòng)自由度,磁浮列車(chē)的動(dòng)力學(xué)拓?fù)浣Y(jié)構(gòu)如圖4所示。

圖4 磁浮列車(chē)動(dòng)力學(xué)拓?fù)浣Y(jié)構(gòu)
2.2 電磁鐵模型
電磁鐵控制系統(tǒng)模型如圖5所示,電流在通過(guò)恒流線圈時(shí),根據(jù)電磁感應(yīng)定律,由電磁場(chǎng)產(chǎn)生的電磁力使車(chē)體懸浮,保證車(chē)體與F軌之間有合理間隙。輸入的電壓經(jīng)過(guò)一定控制,輸入到電流線圈中產(chǎn)生電流,這樣受控制的電壓可使控制線圈的電流也加以控制,從而產(chǎn)生受控制的電磁力來(lái)調(diào)整并保證列車(chē)運(yùn)行中的懸浮間隙。
列車(chē)在運(yùn)行中由于軌道不平順和梁體位移使得懸浮間隙會(huì)產(chǎn)生變化,為避免間隙過(guò)大而產(chǎn)生懸浮架與軌道相互碰撞,控制器根據(jù)電磁鐵端部傳感器產(chǎn)生的懸浮間隙信號(hào)的大小,按控制算法去控制電磁鐵線圈電壓,改變電磁回路中電磁力大小,保證懸浮間隙在設(shè)定范圍內(nèi)變化,保證列車(chē)安全運(yùn)行。目前,控制系統(tǒng)的算法一般采用工業(yè)設(shè)計(jì)中PD控制方法來(lái)模擬[16-17]。
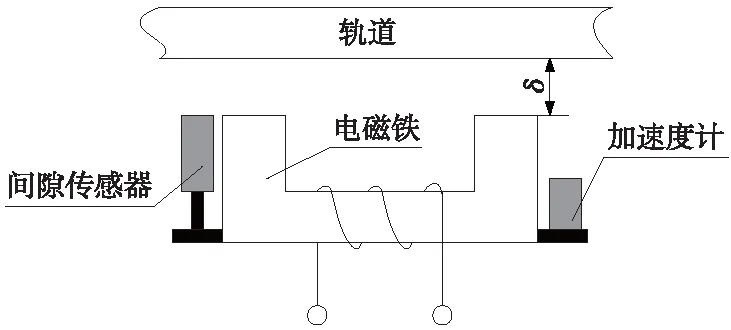
圖5 電磁鐵控制系統(tǒng)物理模型
2.3 橋梁模型
利用通用有限元分析軟件Midas,按空間梁?jiǎn)卧蛄耗P停翰慷诤爿d按均布附加質(zhì)量添加到梁?jiǎn)卧校ё鶆t在計(jì)算模型中將其簡(jiǎn)化為邊界條件。單跨簡(jiǎn)支梁有限元模型共有27個(gè)節(jié)點(diǎn),22個(gè)單元,對(duì)于混凝土橋,阻尼比按2%選取,有限元模型見(jiàn)圖6。梁體自振特性見(jiàn)表1。

圖6 簡(jiǎn)支梁有限元模型
2.4 軌道不平順
由于已建成的中低速磁浮軌道交通較少,尚無(wú)實(shí)測(cè)值可以運(yùn)用,軌道不平順時(shí)程參考Hullender提出的柔性高架線路采用的隨機(jī)不平順功率譜[18],通過(guò)三角級(jí)數(shù)法,將譜函數(shù)加以頻域到時(shí)域的相關(guān)變換,還原出線路的不平順數(shù)據(jù)并生成曲線。不平順序列樣本長(zhǎng)度取1 km,如圖7所示。
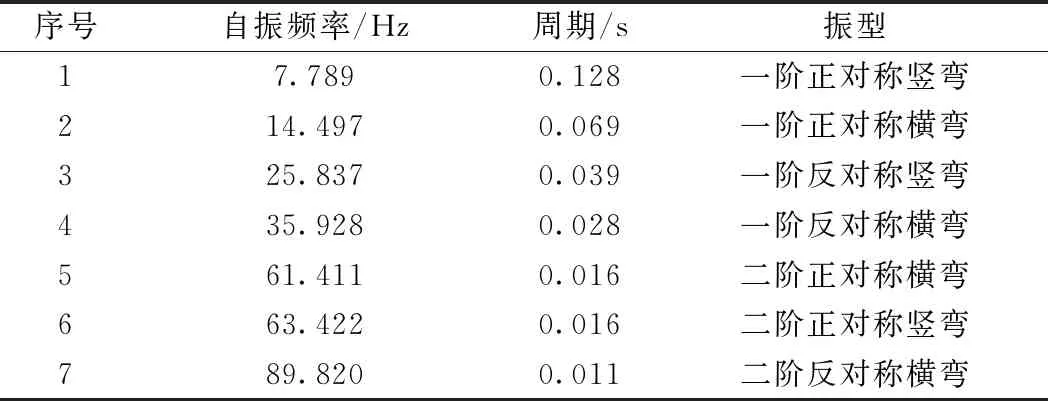
表1 梁體自振特性

圖7 軌道不平順曲線
3 車(chē)橋動(dòng)力響應(yīng)評(píng)價(jià)指標(biāo)
截至2019年底,中低速磁浮軌道交通設(shè)計(jì)規(guī)范沒(méi)有明確指出車(chē)橋系統(tǒng)的動(dòng)力評(píng)價(jià)指標(biāo),對(duì)于列車(chē)運(yùn)行安全性與旅客乘坐舒適性的評(píng)定標(biāo)準(zhǔn),參考輪軌制式交通既有的相關(guān)國(guó)標(biāo)TB10002—2017《鐵路橋涵設(shè)計(jì)規(guī)范》,車(chē)體加速度按豎向≤0.25g、橫向≤0.20g;對(duì)于橋梁動(dòng)力響應(yīng)限值選取依據(jù)CJJT262—2017《中低速磁浮交通設(shè)計(jì)規(guī)范》,結(jié)合鐵路橋梁現(xiàn)行相關(guān)標(biāo)準(zhǔn),橋梁豎向撓度限值L/3 800;豎向和橫向振動(dòng)加速度限值分別取0.50g(半幅)、0.14g(半幅)[19-20]。
4 車(chē)橋動(dòng)力響應(yīng)分析
根據(jù)列車(chē)廠提供的設(shè)計(jì)參數(shù),磁浮列車(chē)編組采用空車(chē)25 t+中間車(chē)30 t+尾車(chē)30 t模式,而中間車(chē)的質(zhì)量又略小于尾車(chē),橋梁選取連續(xù)6跨簡(jiǎn)支梁+7個(gè)橋墩。根據(jù)前文描述的車(chē)橋系統(tǒng)與原理進(jìn)行聯(lián)合仿真分析,得到動(dòng)力響應(yīng)結(jié)果。
4.1 列車(chē)響應(yīng)結(jié)果
各車(chē)體的動(dòng)力響應(yīng)結(jié)果如表2所示。由表2可見(jiàn),在列車(chē)以10~80 km/h速度通過(guò)時(shí),3節(jié)列車(chē)車(chē)體豎向位移響應(yīng)最大值為4.089 mm,發(fā)生在80 km/h速度工況下;在相同車(chē)速工況下,最大豎向位移值為首車(chē)最小,尾車(chē)最大,這是由于不同車(chē)體的質(zhì)量差別決定;車(chē)體最大加速度響應(yīng)值為0.187 m/s2,也發(fā)生在80 km/h速度工況。各車(chē)速下列車(chē)加速度均能滿(mǎn)足規(guī)范中車(chē)體最大加速度限值0.125g的要求。
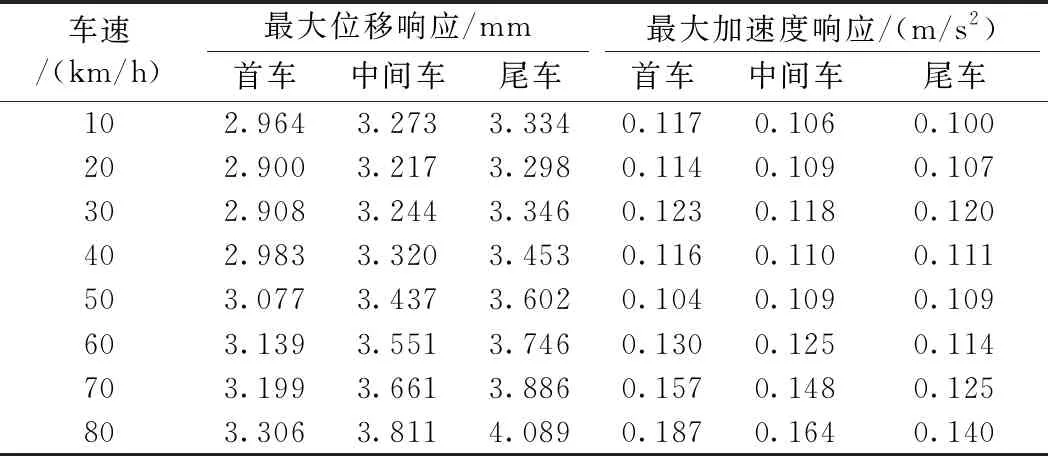
表2 列車(chē)車(chē)體動(dòng)力響應(yīng)值
首車(chē)的5個(gè)懸浮架豎向位移和加速度響應(yīng)值如表3所示。由表3可見(jiàn),在列車(chē)以10~80 km/h速度工況通過(guò)橋梁時(shí),懸浮架最大位移響應(yīng)值為5.798 mm、最大加速度響應(yīng)值為1.976 m/s2,均發(fā)生在80 km/h速度工況,且車(chē)速越高,懸浮架豎向位移越大。
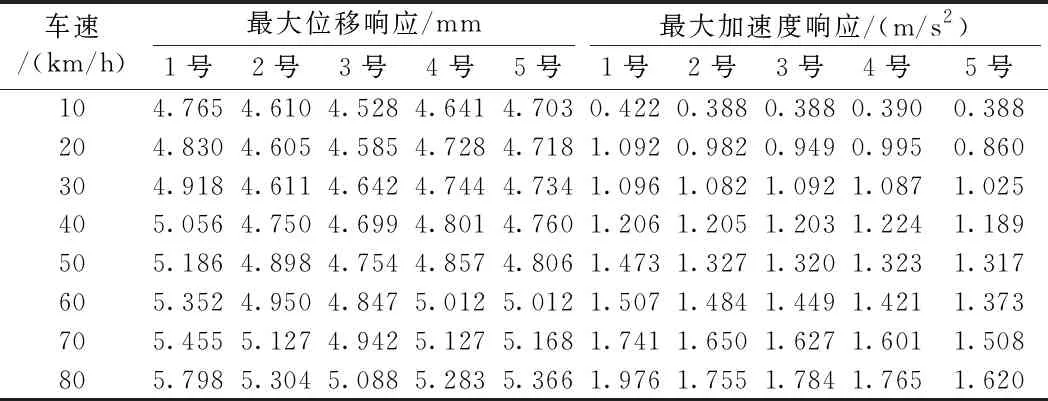
表3 首車(chē)5個(gè)懸浮架動(dòng)力響應(yīng)值
4.2 梁響應(yīng)結(jié)果
取計(jì)算中6跨梁的中間兩跨,梁體豎向位移和加速度動(dòng)力響應(yīng)最大值如表4所示。由表4可以看出,各車(chē)速下橋梁響應(yīng)均能滿(mǎn)足相關(guān)要求。在列車(chē)以各速度通過(guò)時(shí),梁體豎向位移最大值為2.779 mm(撓跨比1/6 945),發(fā)生在70 km/h速度工況,且豎向位移最大值隨車(chē)速提高呈增大趨勢(shì);梁體豎向加速度最大值為1.380 m/s2,發(fā)生在80 km/h速度工況,隨車(chē)速提高跨中加速度增大明顯,最大值均小于橋梁動(dòng)力響應(yīng)限值。
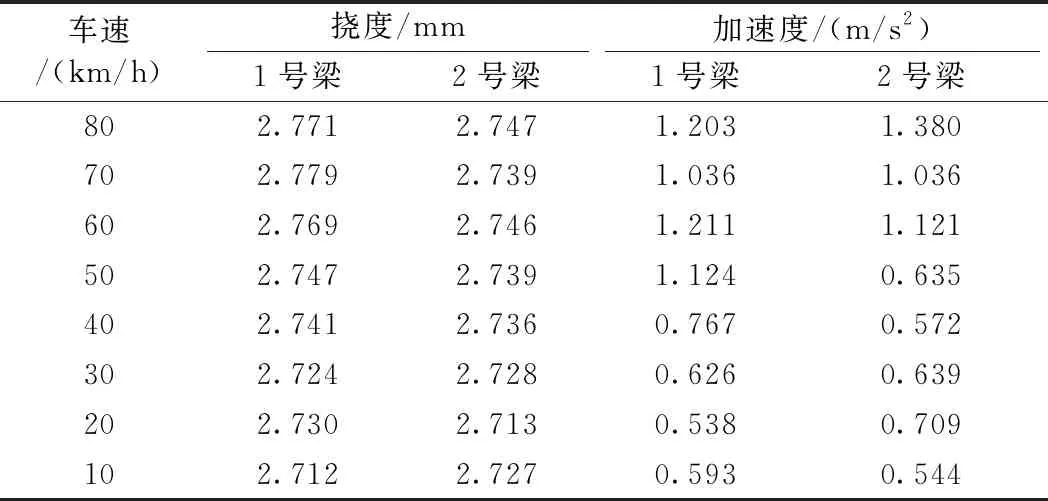
表4 橋梁跨中撓度和加速度
5 結(jié)論
針對(duì)中低速磁浮軌道試驗(yàn)線20 m跨度簡(jiǎn)支箱梁,建立了車(chē)橋與相關(guān)控制系統(tǒng)動(dòng)力分析模型,通過(guò)分析列車(chē)與橋梁的動(dòng)力響應(yīng),得到以下結(jié)論:
(1)磁浮列車(chē)各車(chē)體豎向位移和加速度值,隨著車(chē)速提高呈逐漸增大趨勢(shì);由于車(chē)速不高,車(chē)體最大加速度值距離限值0.25g還有很大差距;
(2)通過(guò)對(duì)比懸浮架與車(chē)體豎向位移及加速度響應(yīng),加速度值衰減顯著,說(shuō)明空氣彈簧系統(tǒng)有效減弱了懸浮架傳遞至車(chē)體振動(dòng);
(3)隨著車(chē)速提高,梁體豎向位移值呈明顯增大趨勢(shì),撓跨比滿(mǎn)足規(guī)范要求;
(4)隨著車(chē)速提高,梁體豎向加速度增大明顯,均遠(yuǎn)小于規(guī)范限值。
未來(lái)還應(yīng)緊密結(jié)合運(yùn)營(yíng)線的反饋情況及實(shí)測(cè)數(shù)據(jù),對(duì)仿真分析模型進(jìn)行修正,結(jié)論可為磁浮軌道簡(jiǎn)支梁設(shè)計(jì)提供參考,同時(shí)也為未來(lái)更高速度磁浮軌道梁動(dòng)力仿真分析方法提供技術(shù)儲(chǔ)備,滿(mǎn)足磁浮軌道橋梁建設(shè)需要。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年4期)2019-04-22 03:28:24
中國(guó)公路(2017年11期)2017-07-31 17:56:30
中國(guó)公路(2017年10期)2017-07-21 14:02:37
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:04
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
