某型發動機高原起動失敗問題分析
2022-07-13 09:04:30朱明勇唐平一彭文輝張光宇鄒黎
中國科技縱橫 2022年11期
關鍵詞:發動機
朱明勇 唐平一 彭文輝 張光宇 鄒黎
(中國航發湖南動力機械研究所,湖南株洲 412002)
航空燃氣渦輪軸發動機的起動是一個非穩態的過程,它涉及工程熱力學、氣體動力學、傳熱學和控制技術在內的多門學科[1]。不同的大氣條件、控制規律等均會影響發動機起動性能,如何保證發動機在使用包線范圍內快速、可靠地起動是人們一直以來廣泛關注的課題[2-4]。
某型發動機是軸向進氣、單轉子燃氣發生器、環形回流燃燒室燃燒室、自由渦輪式渦軸發動機,采用全權限數字式電子控制系統(簡稱數控系統),以雙發型式配裝某直升機。在某次高原試飛過程中,在4600m高原出現起動失敗現象。圖1為某次高原起動歷程曲線,圖中ng、np、T45、nr分別表示燃氣發生器轉速、動力渦輪轉速、燃氣渦輪出口溫度、旋翼轉速,發動機點火、起動發電機帶轉正常,當ng達到75%時,np小于20%,數控系統自動控制發動機停車,起動失敗。
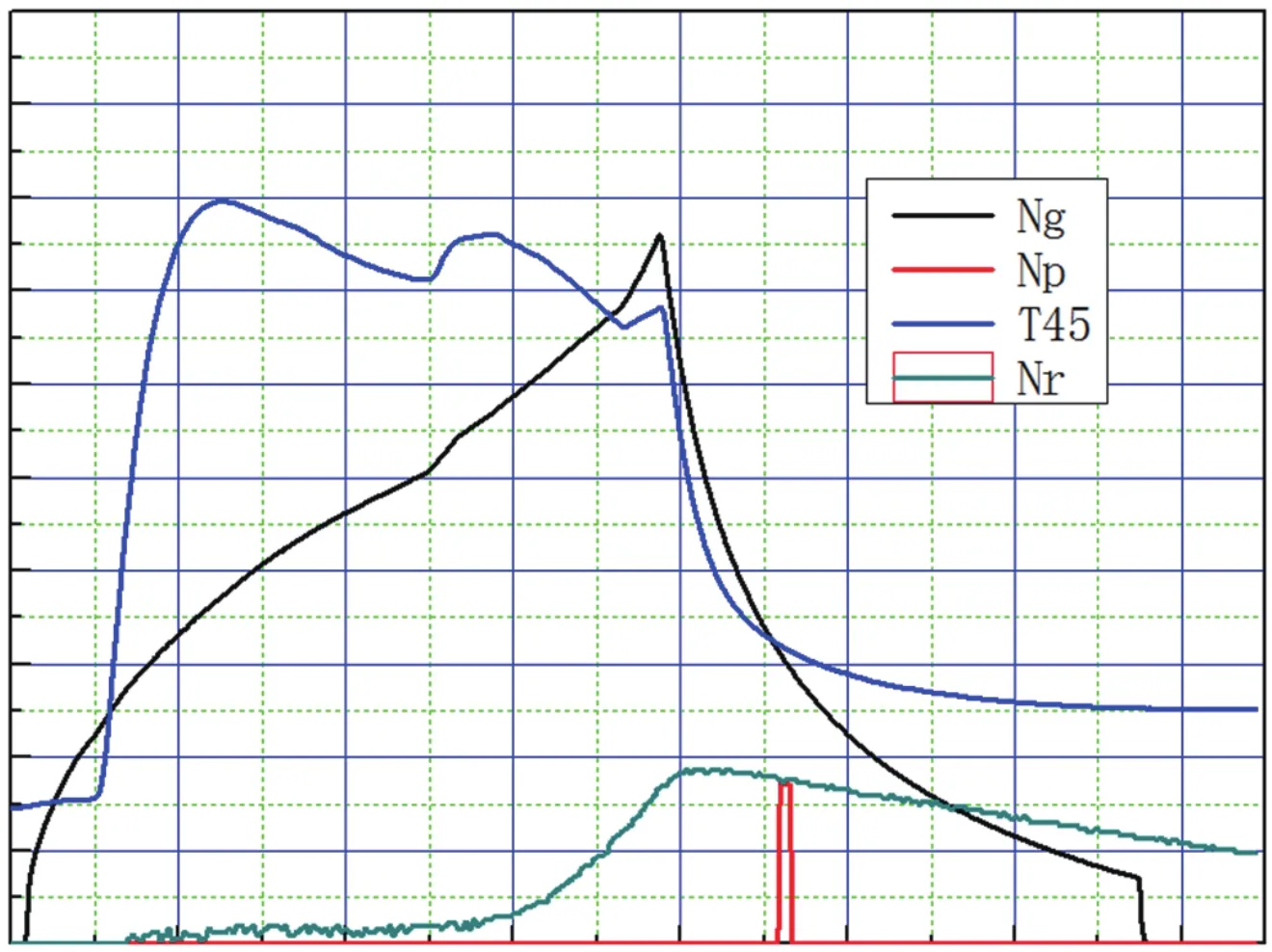
圖1 某次高原起動失敗歷程曲線
1.起動控制規律簡介
在起動控制規律的發展早期,廣泛使用機械液壓式的燃調系統,起動過程主要采取在給定燃油流量的基礎上進行簡單的修正方法,比如根據大氣溫度調整修正螺釘。隨著數控系統的使用,使得燃油給定更為靈活,出現了給定轉速率閉環計算燃油流量的方法[5-6]。某型發動機的起動控制規律包括以下3個階段:ng轉速開環階段,ng加速度閉環階段,慢車工作階段。
ng轉速開環階段:達到開始供油轉速后,發動機按給定的供油規律開始供油,該階段按固定初始供油量進行供油,并根據大氣條件對供油量進行修正。
ng加速度閉環階段:根據給定的ng加速度,數控系統自動計算燃油流量需求值,發動機加速至慢車狀態。
慢車工作狀態:ng加速度閉環階段結束后,數控系統根據慢車目標值,自動調節燃油流量,加速至地面慢車狀態。
起動過程中,由于外界環境極度惡化或發動機本身故障可能導致起動溫度偏高,或起動轉速上升較慢甚至懸掛,為保障發動機的安全,需根據發動機參數變化對起動使用過程進行限制或保護,其主要的的參數限制集中在以下幾個方面:
(1)燃氣溫度限制與保護。為了盡快起動發動機,需要保持較高的渦輪前溫度,一般來說,渦輪前溫度越高起動越快,但是由于材料的限制,航空發動機必須對燃氣溫度進行限制,否則將使損壞發動機。而由于發動機起動過程的實時性和復雜性,很容易出現起動超溫現象,如果沒有超溫保護,燃氣溫度將在極短的時間內上升到發動機材料的熔點溫度。
(2)轉速限制。目前渦軸發動機轉子動力學設計中,一般將發動機燃氣渦輪轉子和動力渦輪轉子的穩態轉速在2階臨界轉速和和3階臨界轉速之間,以保證較大的轉速裕度。因此渦軸發動機起動過程會需要跨越1階臨界轉速和和2階臨界轉速,如果起動緩慢或起動懸掛,有可能導致發動機在臨界轉速上工作,振動增大而損壞發動機,因此需對起動時間和地面慢車轉速進行合適的定義和限制,避免出現發動機轉速在臨界轉速附近范圍維持時間過長。
根據內涵與外延反變關系的簡單原理,詞項的內涵越簡單,外延越大;反之,外延越小。結果責任不僅是侵權責任的最簡構成,也決定了它的最大邊界。過錯責任與無過錯責任均是在結果責任基礎上增加構成要素或條件,二者的責任范圍均要小于結果責任。所謂“侵權責任的擴張”實際上僅指侵權法自近代以來以“過錯責任”為基準因應社會關系的深廣發展而進行的必要延伸。但就責任的構成及其邏輯外延來說,近現代法中的侵權責任相對于結果責任仍然是限縮的狀態。并且,無論侵權責任如何“擴張”,結果責任作為侵權責任的最簡構成已限定了它的最大邊界。
為保護發動機,防止起動過程中超溫、轉速懸掛等對發動機造成損傷,某型發動機主要設置了起動超溫保護、燃氣發生器轉速懸掛保護、動力渦輪轉速超時未出現保護等。觸發保護條件后,數控系統自動控制發動機停車。
某型發動機使用維護手冊規定:發動機起動過程中,燃氣發生器轉速達到75%時,動力渦輪轉速仍小于20%,數控系統控制發動機停車。
2.問題原因分析
經數據分析,確認發動機高原起動失敗的原因為np轉速在規定時刻未達到20%,數控系統自動保護停車。發動機高原起動保護可能有以下4個方面原因:動力渦輪轉子卡滯、np測量故障(包括np傳感器故障和裝機電纜接觸不良)、旋翼負載增大、渦輪剩余功率不足。具體分析如下:
(1)動力渦輪轉子卡滯。起動失敗后,現場盤車檢查動力渦輪轉子靈活性,未見異常。分析發參數據,停車時np轉速由70%降至20%的時間均為18s,停車np余轉時間未見異常,因此動力渦輪轉子卡滯可排除。
(2)裝機電纜接觸不良引起np信號故障。測試線路插頭及導通性,未見異常,后續起動均成功,裝機電纜接觸不良引起np信號故障可排除。
(3)np傳感器故障。測量2只np傳感器電阻,均在正常范圍,而且后續多次飛行任務,np轉速及扭矩采集均正常,np傳感器故障可排除。
(5)渦輪剩余功率不足。分析飛參和發參數據,發動機正常起動時,ng至66%時np為17%,此時旋翼轉速nr約為17%。A架機左發起動失敗過程中,電機帶轉能力、ng和T45上升時間均在正常范圍,而ng至66%時,nr為9%,推測np約為9%(不能采集到),np轉速上升偏慢。B架機右發起動失敗過程中,電機帶轉能力、ng和T45上升時間均在正常范圍,而ng至66%時,nr為10%,推測np約為10%(不能采集到),nr旋翼上升偏慢。經查發動機在4600m高原熱機成功起動數據,ng至75%時,np約為22%;查發動機在3000m高度熱機起動數據,ng至75%時,np約為29%。
文獻[7]對氣壓高度對發動機起動的影響進行了研究。通過模擬計算,在3000m高度條件下,電機脫開后,渦輪有較大的剩余功率(相當于126%電機額定功率)用于帶轉壓氣機及附件。在4000m高度條件下,電機脫開后,渦輪剩余功率較小(相當于12%電機額定功率)。由于可用于加速燃氣渦輪轉子的剩余功率減少,因此在高空起動過程的第2階段和第3階段,ng上升速率隨著高度的上升而減小。
綜上所述,渦輪剩余功率不足不能排除。
(6)問題原因分析小結。根據以上分析,動力渦輪轉子卡滯、np測量故障、旋翼負載增大可以排除,問題原因定位為渦輪剩余功率不足。
3.改進措施及驗證
為解決高原起動失敗問題,綜合考慮外場使用需求和改進貫改周期,分別提出外場臨時措施和優化改進方案。
某型發動機以雙發型式配裝直升機,其中后起發動機動力渦輪處于空載狀態,np轉速出現和上升較快,在高原試飛中未出現np超時保護停車現象。因此,提出外場臨時使用措施如下:當一發起動過程np轉速在規定時刻未達到20%保護停車,先起動另一發至地面慢車狀態,再起動本發。通過該措施,保障了發動機的正常起動和運行及試飛任務的順利完成。
由于高原條件下大氣稀薄,發動機做功能力降低,且起動過程中燃氣溫度已接近限制值,通過增加起動供油量提高發動機做功能力存在較大風險。因此,選擇對高原條件下發動機數控系統起動保護邏輯進行優化的改進方案,即增加高原條件下np等待時間,具體如下:
發動機起動過程中,在海拔2000m及以下高度,當燃氣發生器轉速首次達到或超過75%時,若動力渦輪轉速小于20%,數控系統控制發動機停車。在海拔2000m以上高度,當燃氣發生器轉速首次達到或超過75%時以后5s時動力渦輪轉速小于20%,數控系統控制發動機停車。
起動保護邏輯改進后,發動機在外場使用未出現該問題。驗證結果表明,起動控制規律優化措施有效。
4.結論
針對某型渦軸發動機高原起動失敗問題,通過故障分析的方法,并結合試驗情況進行分析排查,得出該問題原因是動力渦輪轉速上升緩慢,高原條件下渦輪剩余功率不足。主要結論如下:
(1)某型發動機高原起動失敗的原因為動力渦輪轉速上升緩慢,當燃氣發生器轉速達到75%時,動力渦輪轉速仍小于20%,數控系統自動停車。
(2)由于高原空氣稀薄,發動機做功能力降低,綜合考慮改進風險和周期,通過優化數控系統起動保護邏輯的改進措施,解決了該類型高原起動失敗問題,經驗證措施有效。
(3)該問題發生在起動包線邊界、部分發動機的少量熱機起動過程中,在設計控制規律保護邏輯時應充分考慮發動機的分散性,保留一定的設計裕度。
(4)該問題的發生及解決思路,可為其他新研或改型渦軸發動機起動控制規律設計提供參考。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
太空探索(2016年8期)2016-07-10 09:21:58
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:40