基于“FAST”主動反射面形狀調節問題的研究
2022-07-13 07:16:02張科智李思陽
河西學院學報 2022年2期
張科智 魏 魁 王 帥 李思陽
(1.河西學院物理與機電工程學院;2.河西學院非線性物理研究所,甘肅 張掖 734000)
引言
中國天眼FAST是目前世界上口徑最大、最具威力的單天線射電望遠鏡,它的建成對于我國在人類直接觀測遙遠星系行星、尋找類似太陽系或地球的宇宙環境,以及潛在智慧生命方面都有關鍵性的作用,在航天工程及其他領域具有廣泛用途[1,2],它的啟用對我國在科學前沿實現重大原創突破、加快創新驅動發展具有重要意義.
天眼FAST由主動反射面、饋源艙以及相關系統組成.其模型是:利用可見光模擬天眼接收到電磁波信號,經過反射面板工作將可見光反射匯聚到模擬饋源艙與接收機系統,此后將接收到的可見光通過光敏電阻及相關電路轉換為電信號[3,4].但當可見光經反射面板不能準確反射到光敏電阻位置時,可利用紅外遙控器對天眼的控制與模擬測量系統進行調節,使饋源艙的位置達到可見光反射點位置.其中,主動反射面系統是由主索網、反射面板、下拉索、促動器及支承結構等主要部件構成的一個可調節球面.利用主動反射面技術可將反射面調節為工作拋物面.
本文討論在反射面板調節約束下,利用幾何規律和粒子群優化算法確定被測天體S位于基準球面的不同方位時,體系的旋轉拋物面方程和基準球面方程,研究FAST主動反射面的天體形狀調節問題.通過調節促動器的徑向伸縮量,將天體位于不同方位時的反射面板調節為工作拋物面,使得該工作拋物面盡量貼近理想拋物面,讓到達饋源艙的平行電磁波最強,以獲得天體電磁波經反射面反射后的最佳接收效果.
1 理論模型
FAST 主動反射面可分為兩個狀態:基準態和工作態.基準態時反射面為半徑約300m、口徑D 為500m的球面(基準球面);工作態時反射面的形狀被調節為一個300m口徑的近似旋轉拋物面(工作拋物面),FAST在觀測時的剖面示意圖,如圖1所示,C點是基準球面的球心,饋源艙接收平面的中心只能在與基準球面同心的一個球面(焦面)上移動,兩同心球面的半徑差為F=0.466Rm(其中R為基準球面半徑,稱F/R為焦徑比).饋源艙接收信號的有效區域為直徑1m的中心圓盤.當FAST觀測某個方向的天體目標S時,饋源艙接收平面的中心被移動到直線SC 與焦面的交點P處,調節基準球面上的部分反射面板形成以直線SC為對稱軸、以P為焦點的近似旋轉拋物面,從而將來自目標天體的平行電磁波反射匯聚到饋源艙的有效區域.
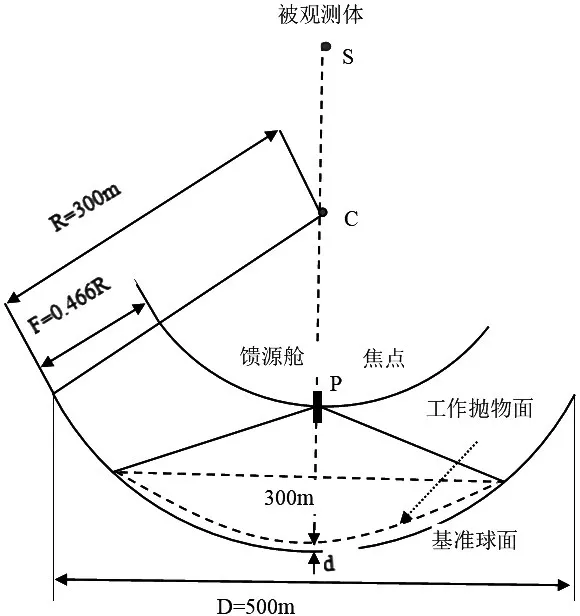
圖1 “FAST”剖面示意圖
由于不同的工作狀態選取的工作拋物面不同,這里我們以球心C坐標為坐標原點,豎直向上為z軸正方向建立空間直角坐標系,首先建立觀測天體S位于基準球面的正上方時的理想拋物面模型,然后進一步探究觀測天體位于任意方位角和仰角時的理想拋物面模型.
當觀測天體S位于基準球面的正上方時,α=0°,β=90°,其剖面如圖1所示.
由幾何關系和物理規律建立基準球面的剖面方程為:
我們在基準球面(4)式的基礎上,通過改變促動器的伸縮量來改變工作拋物面的位置,經計算口徑為300m 的旋轉拋物面與球面的徑向距離之差超過促動器徑向伸縮范圍-0.6m~+0.6m 的主索點有423 個,因此,需要對旋轉拋物面進行修正.設拋物面焦距的修正量為d,其中d 的取值范圍是[-0.6m,0.6m],則修正后的旋轉拋物面方程為:

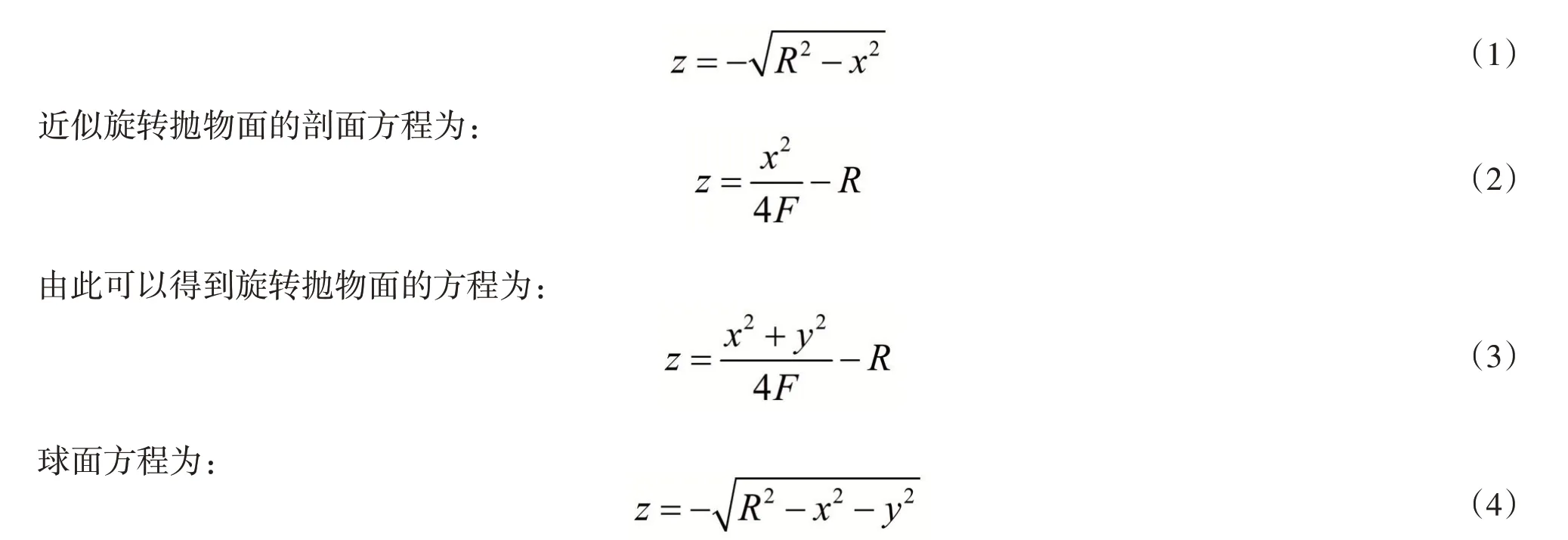
結合反射面板調節因素,可以優化計算得到旋轉拋物面焦距修正量d.(5)式是我們求解改變主動反射面形狀后體系理想拋物面的關鍵.其中反射面反調節因素示意圖如圖2所示,包括主索節點、反射面板及促動器的徑向伸縮量等[5].本文中我們采用主動反射面共有主索節點2226個,不考慮周邊支承結構連接的部分反射面板共有4300塊[2].
圖2 反射面板、主索網結構示意圖
當天體位于任意方位角和仰角時,可在上述模型的基礎上利用坐標變換確定理想拋物面模型.
2 天體位于α=0°, β=90°時理想拋物面的確定
將反射面調節為工作拋物面是主動反射面技術的關鍵,該過程通過下拉索與促動器配合來完成[6].下拉索長度固定,促動器沿基準球面徑向安裝,其底端固定在地面,頂端可沿基準球面徑向伸縮來完成下拉索的調節,從而調節反射面板的位置,最終形成工作拋物面.從而使信號更好的反射到饋源艙,其工作面反射如圖3所示.
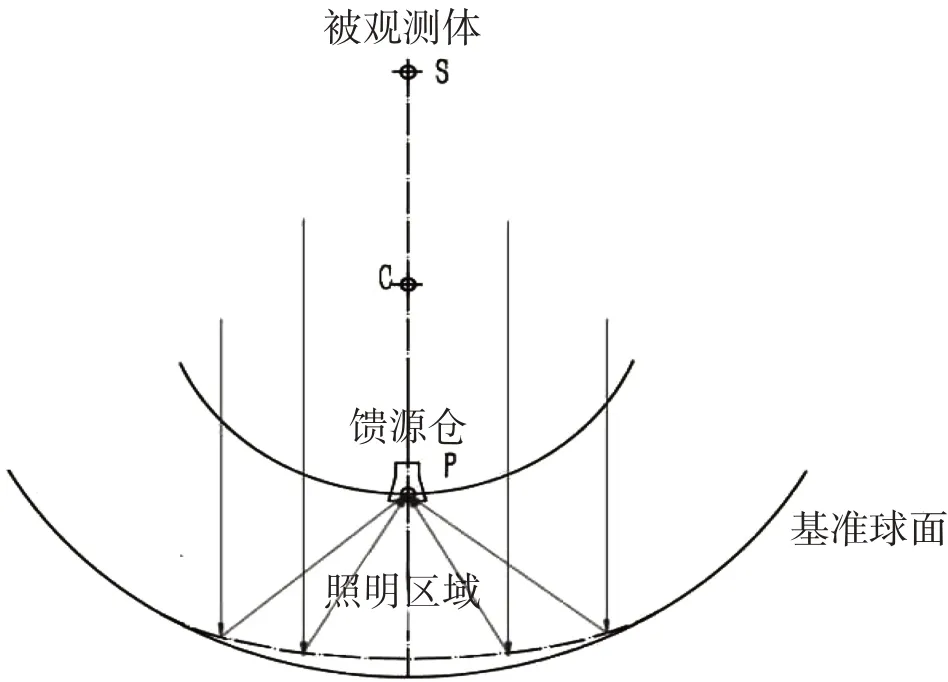
圖3 工作面反射示意圖
結合反射面板調節因素,經優化計算得到旋轉拋物面焦距修正量為0.204m,結合(5)式,由matlab畫圖得到到理想拋物面的曲面方程,如圖4和圖5所示.
從圖4我們看到,經過修正后當被測天體S位于基準球面正上方時得到理想的拋物面如圖4中的藍色曲線所示,非常好的貼近基準球面如圖4中的紅色曲線.為了更清楚的描述理想拋物面的貼合程度,把圖4中的藍色曲線另畫如圖5所示.由拋物面的對稱性及球面的徑向距離之差超過促動器徑向伸縮范圍-0.6m~+0.6m此約束條件知,此時的反射面是最理想的工作拋物面,使得天體電磁波經反射面反射后的接收效果最佳.
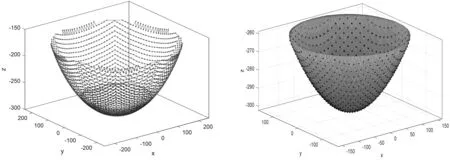
圖4 天體位于基準球面正上方時理想拋物面與基準球面的比較,紅色線代表基準球面,藍色線代表理想拋物面
圖5 天體位于基準球面正上方時理想拋物面
3 天體位于α=36.795°, β=78.169°時,理想拋物面的確定
3.1 模型建立
當觀測天體S位于任意方位角和仰角時,可將天體位于基準球面正上方所得到的理想拋物面進行旋轉變換確定此時的理想拋物面.本文任意選擇某一角度如α=36.795°,β=78.169°,建立反射面板調節模型,利用約束條件使反射面盡量貼近理想拋物面.
依據分析,建立如下數學模型:

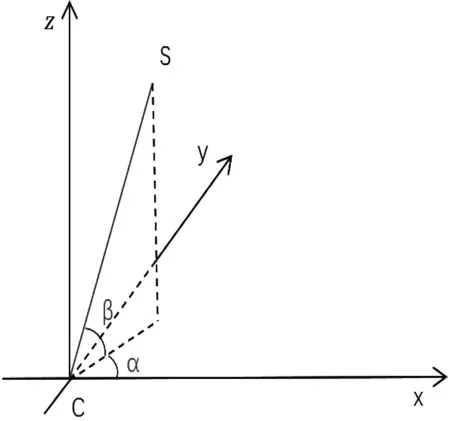
圖6 天體S方位角和仰角示意圖

頂點坐標為(-49.287m,-36.865m,-293.823m).
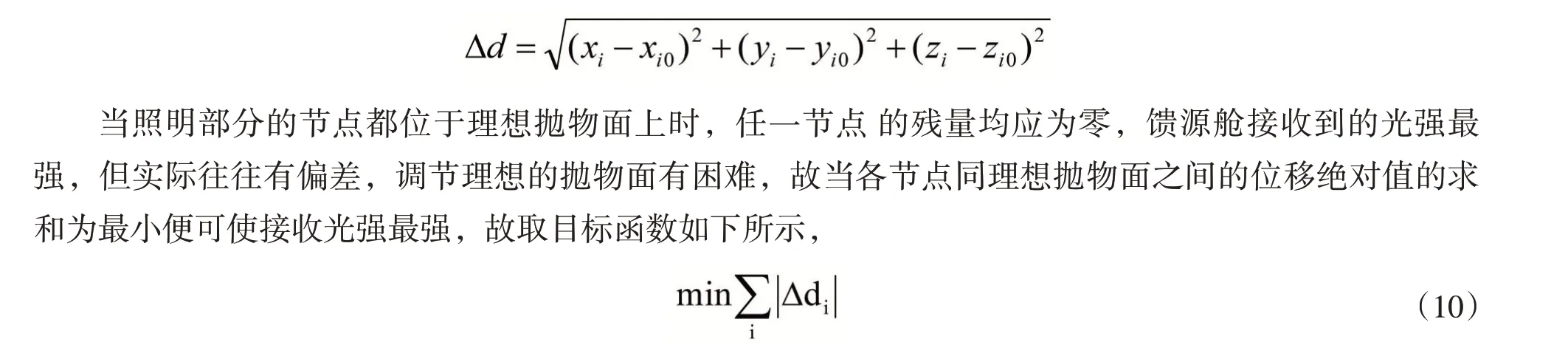
3.2 目標函數
因主動反射面工作時要求將主動反射面調整成盡可能接近理想拋物面的形狀,使到達饋源艙的平行電磁波最強.因此調整后的節點位置相對于理想拋物面的偏差為最小時便是此問題的目標函數.故,設xi0(i=1,2,3…n)為節點i的初始位置坐標向量.調整后對應的節點位移為
3.3 約束條件
假設基準狀態下,促動器頂端徑向伸縮量為0,其徑向伸縮范圍為-0.6m~+0.6m;主索節點調節后,相鄰節點之間的距離變化不能太大,會發生微小變化,變化幅度不超過0.07%.故約束條件為
3.4 結果及應用
通過式(9),利用約束條件和粒子群優化算法優化得到天體位于α=36.795°,β=78.169°時,理想拋物面如圖7所示.
理想拋物面的圖像如圖7和圖8所示.

圖7 藍色代表α=36.795°,β=78.169°時的理想拋物面,紅色線代表α=0°,β=90°時的基準球面
圖8 天體位于α=36.795°,β=78.169°時的理想拋物面
為了對比方便,我們給出了α=0°,β=90°的理想拋物面和α=36.795°,β=78.169°的對比圖如圖7所示.顯然,利用約束條件將重新建立的旋轉拋物面利用粒子群算法進行優化,使反射面調節為工作拋物面,使得如圖7所示的拋物面盡可能的貼近理想拋物面,已獲得天體電磁波經反射面反射后的最佳接收效果.在此過程中為使反射面盡量貼近該理想拋物面,可選反射面300m口徑內主索節點對應的促動器的伸縮量為控制變量,反射面與理想拋物面之間的徑向距離最小為目標函數見(10)式,建立反射面板調節的優化模型,利用粒子群優化算法對反射面300m口徑內的主索節點的位置坐標進行優化得到調節各促動器的伸縮量及各主索節點的位置坐標.
4 結論
本文對射電望遠鏡的反射面的形狀進行了分析,根據幾何關系和物理規律,結合反射面板的調節因素,建立反射面板的理想拋物面以及反射面板調節的優化模型,模型能夠給出使反射面最接近理想拋物面的促動器伸縮量及主索節點的位置坐標,研究結果對于射電望遠鏡反射面板的調節具有一定的參考意義.結果表明:當待觀測天體位于基準球面正上方,即α=0°,β=90°時,根據幾何關系及反射面板的調節因素確定了一個理想拋物面,使得該工作拋物面盡量貼近理想拋物面,以獲得天體電磁波經反射面反射后的最佳接收效果.當待觀測天體位于任意方位角和仰角α=36.795°,β=78.169°時,利用對稱性將得到的理想拋物面經旋轉操作后可得到天體位于任意角度α=36.795°,β=78.169°方位的理想拋物面以及理想拋物面的頂點坐標為O(-49.38m,-36.86m,-293.92m).然后以促動器的伸縮量為控制變量,以調節后反射面板與理想拋物面之間的距離最小為目標函數,以促動器徑向伸縮范圍和主索節點調節后相鄰節點之間變化幅度不超過0.07%為約束條件,建立反射面板調節的優化模型.此方法適合任意方位角的優化計算和鏡面調節.最后采用粒子群算法求解該模型,得到調節后反射面300m口徑內的主索節點編號、位置坐標和各促動器的伸縮量.