基于VMD與MLP的電機軸承故障檢測方法*
2022-07-18 06:32:34黃曉誠賀青川陳文華
機電工程 2022年7期
黃曉誠,賀青川,陳文華
(浙江理工大學 機電產品可靠性分析與測試國家地方聯合工程研究中心,浙江 杭州 310018)
0 引 言
目前,永磁同步電機(PMSM)在數控設備中得到了廣泛應用。而在永磁同步電機中,軸承失效是其主要的故障模式。軸承一旦失效,會加劇系統的振動和噪聲,影響其運動控制的精度。
對于采用臥式安裝的PMSM,其軸承主要承載轉矩負荷,軸承故障時產生的振動沖擊十分微弱[1],同時,故障特征也容易被強背景噪聲掩蓋。
現有電機軸承故障檢測方法主要是通過檢測軸承故障特征幅值的變化,以此來找到故障產生的原因。現有電機軸承故障檢測方法對微弱故障的檢測能力不足,難以獲取準確度較高的檢測結果,不能滿足PMSM軸承故障檢測的需求。
為了從振動信號中準確地提取出PMSM軸承故障特征,必須考慮應用先進的特征提取技術,以此來對軸承振動信號進行降噪處理。
目前,常用的軸承故障特征提取技術有小波包分解、經驗模態分解、固有時間尺度分解、變分模態分解(VMD)等[2,3]。其中,VMD能夠克服模態混疊和端點效應等問題,具有較強的信號降噪能力,近年來在振動信號的故障特征提取方面得到了廣泛應用。
錢林等人[4]將VMD和自適應形態學濾波結合,提取出了PMSM滾動軸承故障特征頻率。LIU Hao-dong等人[5]利用VMD和希爾伯特變換(Hilbert transform,HT),提取出了軸承故障特征頻率和幅值。
在處理多分量非平穩信號時,VMD通過不斷迭代、層層篩選的方式,尋找變分模型中與故障特征相關的周期性平穩分量,剔除其余分量,實現對振動信號的降噪處理。
目前,學者們在應用VMD時為了獲取最佳特征提取效果,通常利用各種優化方法來尋找模態分解個數K和懲罰系數α的最佳組合[6-8]。
為了提高軸承故障檢測效率,目前較為先進的方法是基于神經網絡的方法。
WEI Ze-xian等人[9]提取了軸承故障頻域特征幅值和時域統計參數,利用近鄰傳播(affinity propagation,AP)聚類方法完成了對軸承的故障檢測。EWERT P等人[10]應用多層感知器(MLP)、具有徑向基函數(radial base function,RBF)的神經網絡和自組織映射(self-organizing map,SOM)神經網絡處理故障頻域特征幅值,識別出了故障。ZIA U等人[11]利用基于預訓練視覺幾何組(visual geometry group,VGG)的遷移學習(transfer learning,TL),識別軸承故障特征頻率處的峰值變化,完成了軸承的故障檢測。HAROUN S等人[12]提取了頻域特征幅值和時域統計參數,然后使用相關特征(relevant features,Relief-F)算法和最小冗余最大相關(min redundancy max relevance,mRMR)算法,篩選出了最佳的特征,再用SOM識別出了軸承故障。WANG Zi-wei等人[13]提取了軸承故障特征參數,并計算了5個互無量綱指標,通過隨機森林(random forest,RF)算法投票分類,完成了對軸承的故障檢測。MBO’O C P等人[14]通過分析處理特征頻率段的峰度、偏度、波峰因數等參量,并構建了特征矩陣,使用貝葉斯分類器完成了對軸承的故障識別。XU Gao-wei等人[15]提取了振動信號的灰度圖像,使用深度卷積神經網絡(convolutional neural networks,CNN)和RF進行了特征學習,完成了對軸承健康狀態的識別。KAO I H等人[16]提取了偏心距、電角頻率和軸承故障頻域特征幅值,利用一維CNN進行了數據挖掘,完成了對軸承的故障檢測。
綜上所述,基于神經網絡的方法雖然具有高效的優點,但現有的故障檢測方法對微弱故障信號的檢測能力有限,造成故障檢測結果的準確性較低。
基于以上問題,筆者提出一種PMSM軸承故障歸一化表征指標集合的構建方法,和一種基于VMD和MLP的PMSM軸承故障檢測方法。
首先,筆者對滾動軸承故障、轉子不對中和電磁力不平衡等故障的頻域特征進行歸一化處理,構建PMSM軸承的故障表征指標集合;然后,利用優化VMD的方法處理振動信號,從頻譜圖中提取出故障特征,并計算歸一化表征指標集合;最后,利用MLP對指標集合進行訓練,獲取高精度的PMSM軸承故障檢測器,利用模擬實驗得到的數據對新方法進行驗證。
1 PMSM軸承故障表征指標集合
現有的電機軸承故障檢測指標主要由滾動軸承故障特征構成,其中,深溝球軸承故障特征頻率產生原因及計算公式如表1所示。
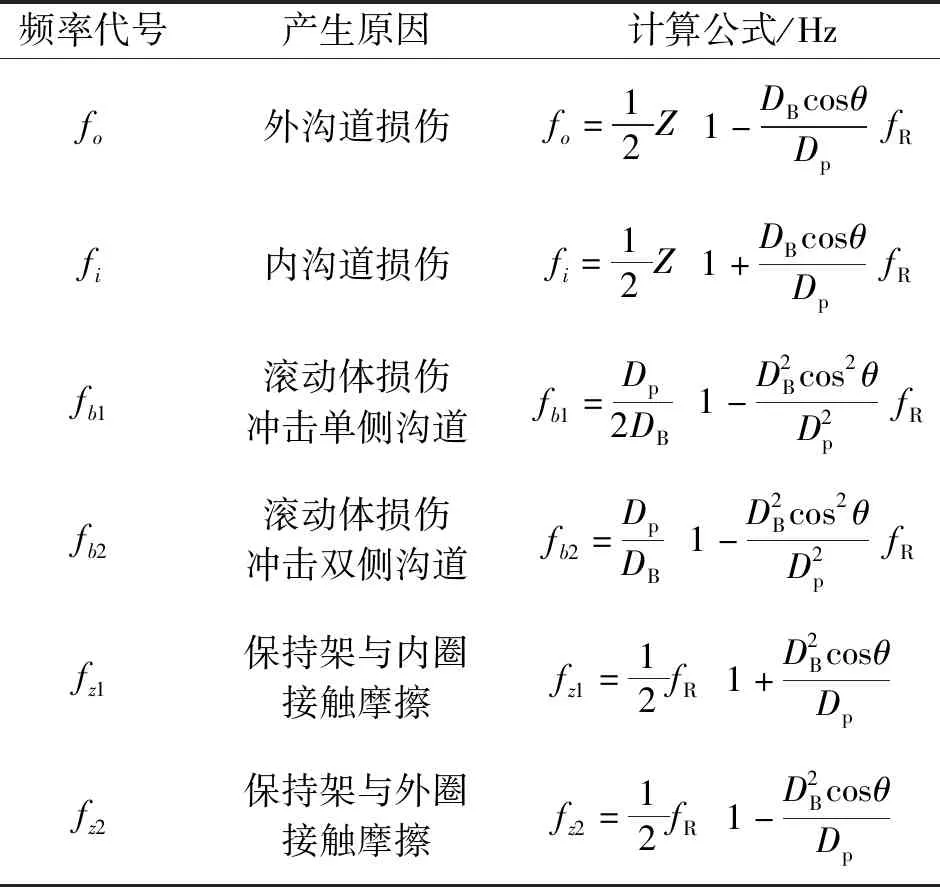
表1 深溝球軸承故障特征頻率產生原因及計算公式
Z—軸承滾動體數量;DB—軸承滾動體直徑;θ—滾動體和溝道的接觸角度;DP—軸承節圓的直徑;fR—轉軸旋轉頻率
在進給傳動系統中,當采用臥式安裝的PMSM軸承發生故障時,還會使轉子軸線發生動態偏移,引起轉子和定子之間的氣隙長度不均勻、轉子動態偏心、轉子和定子之間電磁力不平衡等問題。
因此,除了滾動軸承故障特征之外,電機轉子系統不對中產生的特征頻率2fR和電機電磁力不平衡產生的特征頻率pfR也可以表征PMSM的軸承故障。
(1)

2 PMSM軸承故障檢測方法
2.1 基于優化VMD的故障特征提取方法
為了取得振動信號降噪、故障特征提取的最佳效果,筆者通過優化的方式,以此來獲取K和α最優組合。
具體的步驟如下:
步驟1。采集振動信號y(t);
步驟2。確定k、n取值,計算特征頻率kfo、kfi、kfb1、kfb2、kfz1、kfz2、2mfR和pqfR;
步驟3。利用VMD對y(t)進行降噪和特征提取;
首先,參考文獻[17]中所提出的優化方法,通過優化獲取最佳K和α,將y(t)分解為K個本征模態函數(intrinsic mode function,IMF),如下式所示:
(2)
式中:uk—分解得到的第k個IMF;φk(t)—uk的瞬時相位;Ak(t)—uk的瞬時幅值。
其次,將每個IMF分量進行Hilbert變換和加入指數項,將其頻譜調制到相應的基頻帶,如下式所示:
(3)
式中:δ(t)—沖擊函數;ωk—uk的中心頻率。
其中:j2=-1。
接下來,筆者采用二次罰函數項和Lagrange乘子構建無約束變分模型,以此來求解約束條件下的每個IMF分量,如下式所示:

(4)
式中:α—引入拉格朗日乘子λ(t)時的二次懲罰系數。
(5)
直到滿足迭代終止條件,如下式所示:
(6)


步驟5。在步驟4基礎上,構建軸承故障表征指標集合X,進行故障檢測。
基于VMD的故障特征提取方法的流程圖,如圖1所示。
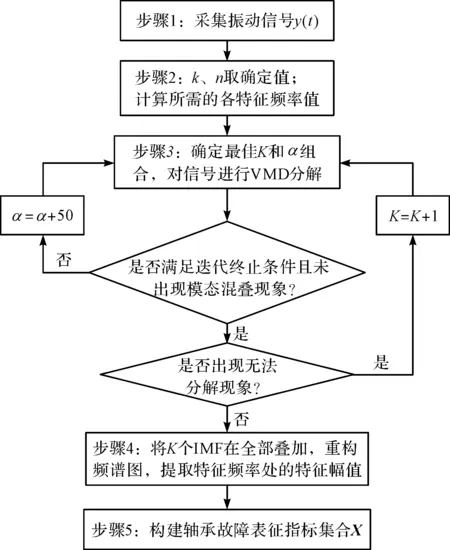
圖1 基于VMD特征提取流程圖
2.2 基于MLP的PMSM軸承故障檢測方法
假設指標集合X中元素總數為N,待檢測PMSM軸承的狀況為M種,已知狀況之一(M≥2),典型的MLP結構如圖2所示。
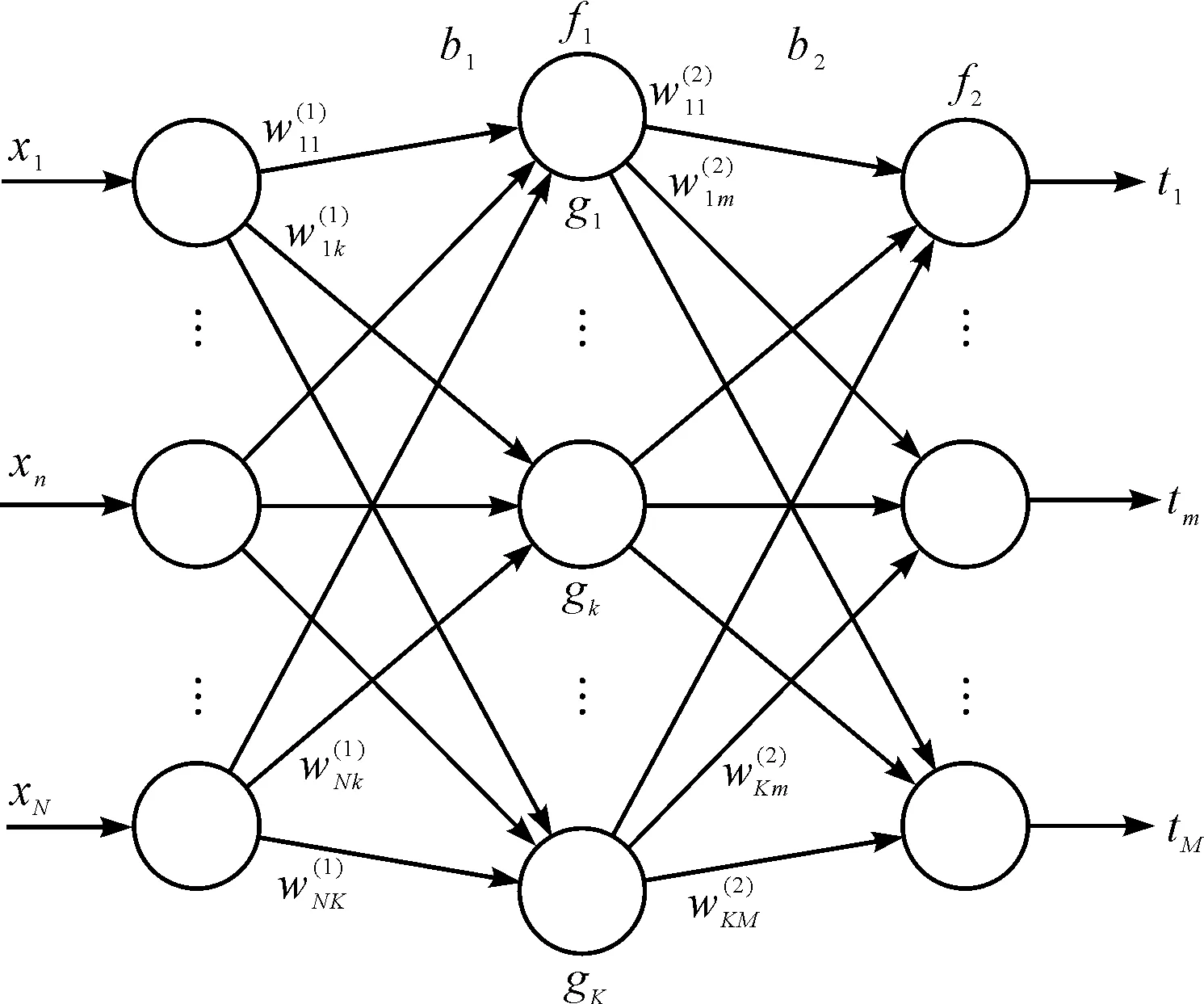
圖2 典型的MLP結構圖
筆者提出的基于MLP的PMSM軸承故障檢測方法的檢測步驟如下:
(1)采集若干個來自于同一批次和相同工況下的PMSM軸承振動信號;
(3)按圖1所示步驟,從每個數據中提取指標集合X,以此作為MLP的網絡輸入;

其中,中間層隱藏節點gk的計算公式為:
(7)
輸出節點tm的計算公式為:
(8)

在偏置的情況下,網絡模型的計算公式如下:
(9)
其中,權重系數wn的更新公式如下:
(10)
式中:μ—正則化因子;Jn—雅可比矩陣;en—學習誤差;η—學習速率;I—偏置矩陣。
(5)采集未知軸承狀況電機的振動信號,按圖1所示步驟,從信號數據中提取表征指標集合X,輸入訓練完成且準確率符合要求的檢測器中,進行故障檢測。
3 實驗驗證
3.1 模擬試驗裝置
為了驗證筆者所提出的方法的有效性和先進性,筆者自制了一套可以模擬數控機床進給傳動系統的試驗測試裝置,對新方法進行驗證。
試驗測試裝置如圖3所示。
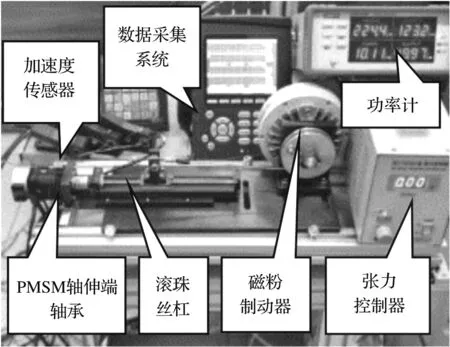
圖3 試驗測試裝置
圖3中,筆者將電機、滾珠絲杠安裝在同一機架上;電機軸伸端通過聯軸器與滾珠絲杠聯結;通過柔性鋼絲繩連接磁粉制動器與工作平臺;通過張力控制器控制磁粉制動器的制動力矩來模擬負載變化。
此處所研究的軸承是電機軸伸端的深溝球軸承,加速度傳感器沿著軸承徑向方向垂直固定在機座上。
3.2 軸承的故障特征提取
筆者收集了3個同型號的PMSM,分別標記為A、B、C。其中,A為新電機;B和C的軸伸端軸承已發生故障。依據軸承故障對轉子軸心軌跡的影響程度,將電機B、C的軸承故障程度評定為輕微和嚴重。
此處所研究的軸承為位于電機軸伸端的深溝球軸承,其型號為ISO 625ZZ,滾動體個數為7,內徑、外徑、滾動體直徑、內溝道直徑、外溝道直徑和軸承節徑分別為5 mm、16 mm、2.78 mm、7.8 mm、13.4 mm和10.6 mm。
此處以電機在額定轉速3 000 r/min下運行,輸出額定功率時的振動信號分析為例,驗證基于VMD的故障特征提取方法的先進性,以及現有電機軸承故障診斷方法的不足。
其中,電機A振動信號波形如圖4所示。
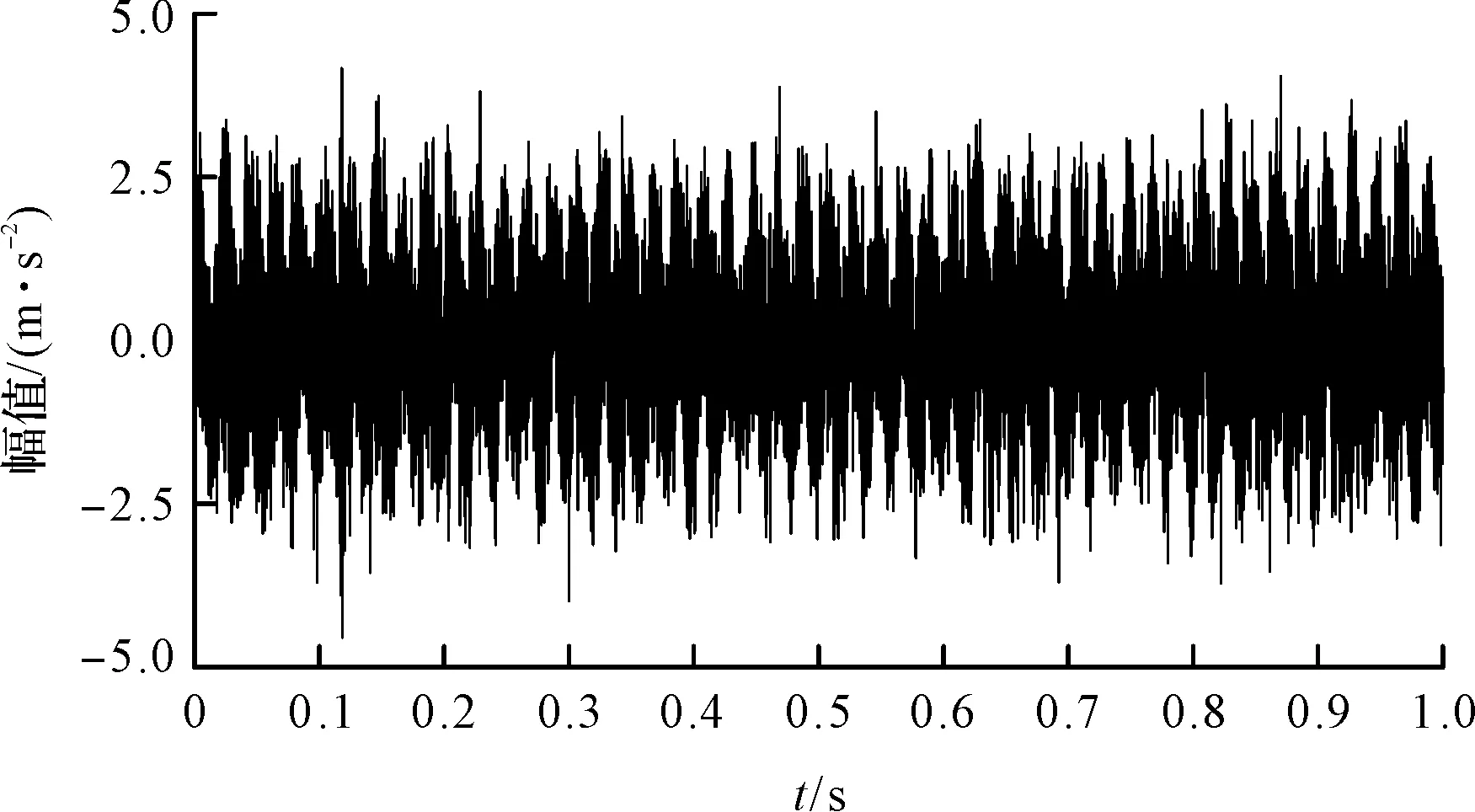
圖4 電機A振動信號波形圖
在K∈[5,14]、α∈[200,8 000]范圍內,抽取若干個K和α組合,然后提取出PMSM軸承故障表征指標集合X,取X的L1范數‖X‖1來衡量指標集合這個向量的大小,判斷特征提取效果是否達到最優,如下式所示:
(11)
式中:xi—集合X中的第i個元素,集合X中元素總數為N。
當K步進為1,α步進為50時,在K和α的不同組合下‖X‖1的計算值,如圖5所示。
圖5 在K和α的不同組合下‖X‖1的計算值
由圖5可知,K和α的不同取值組合確實會影響特征提取效果。
按照圖1所示特征提取流程,筆者首先確定出K和α的最優組合為K=4、α=6 150,符合圖5所示計算結果;再對信號進行降噪、重構和頻譜分析。
電機A振動信號頻譜如圖6所示。
圖6 電機A振動信號頻譜圖
同理,筆者對電機B和C的振動信號進行分析。
電機B振動信號頻譜如圖7所示。
圖7 電機B振動信號頻譜圖
電機C振動信號頻譜如圖8所示。

圖8 電機C振動信號頻譜圖
從理論上來講,k、m和q的取值過大時,提取到的特征幅值趨近于噪聲頻率的幅值,無實際意義。因此,在構建軸承故障表征指標集合X時,筆者取Kc=4,MR=2,Np=4(該電機磁極對數p=4)。
據此,筆者從圖(6~8)中提取出與PMSM軸承故障特征頻率對應的特征幅值。
特征幅值提取結果如表2所示。

表2 特征幅值提取結果

由此可見,若采用現有的電機軸承故障診斷方法,僅依據軸承故障特征幅值的變化進行檢測,容易產生誤判,對PMSM故障軸承的檢測準確度較低且無法準確地判斷出故障程度。
3.3 滾動軸承故障檢測器的訓練和分析
筆者首先采集電機A、B和C在3 000 r/min下、輸出額定功率運行時的振動數據,各120組。接著,按照2.1節方法對每個數據進行特征提取,并計算表征指標集合X。然后,按照2.2節方法,給每個數據貼上標簽,并將每個電機數據的50%作為訓練集、25%作為驗證集、25%作為測試集,對MLP網絡模型進行驗證、訓練和測試。通過代入驗證集進行對比,發現隱藏層神經元數目K的最佳取值為10。
神經網絡的具體分類結果可以由混淆矩陣圖得到,輸入為X時訓練集的分類結果如表3所示。
表3 輸入為X時訓練集的分類結果
從表3中可以看出,總共180個驗證集數據中,有6個電機A的數據被錯分成了電機B的,占比3.3%;其余分類全部正確,占比96.7%。
筆者再輸入測試集數據進行測試,輸入為X時測試集的分類結果,如表4所示。

表4 輸入為X時測試集的分類結果

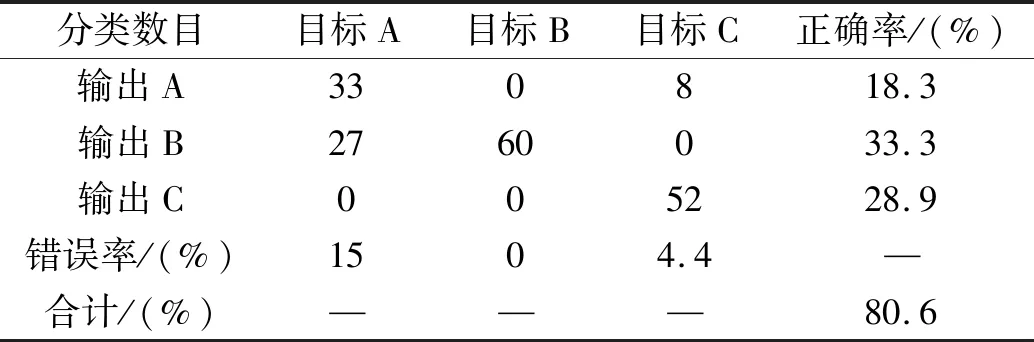
表5 輸入為Y時訓練集的分類結果
從表5中可以看出,有27個電機A的數據被錯分成了電機B的,占比15.0%;有8個電機C的數據被錯分成了電機A的,占比4.4%;正確分類占比80.6%。
最后,筆者輸入測試集數據進行測試,輸入為Y時測試集的分類結果如表6所示。

表6 輸入為Y時測試集的分類結果
為了驗證所提檢測方法的準確度,在1 200 r/min、1 800 r/min和3 000 r/min與10%、50%和100%額定功率下,筆者采集3個電機(每個電機120組)的振動信號;然后,按照上述過程進行故障特征提取、指標集合構建、MLP網絡訓練,獲取故障檢測器;最后,將測試集輸入相應的檢測器,得到各個檢測器對相應驗證集的準確率,如表7所示。
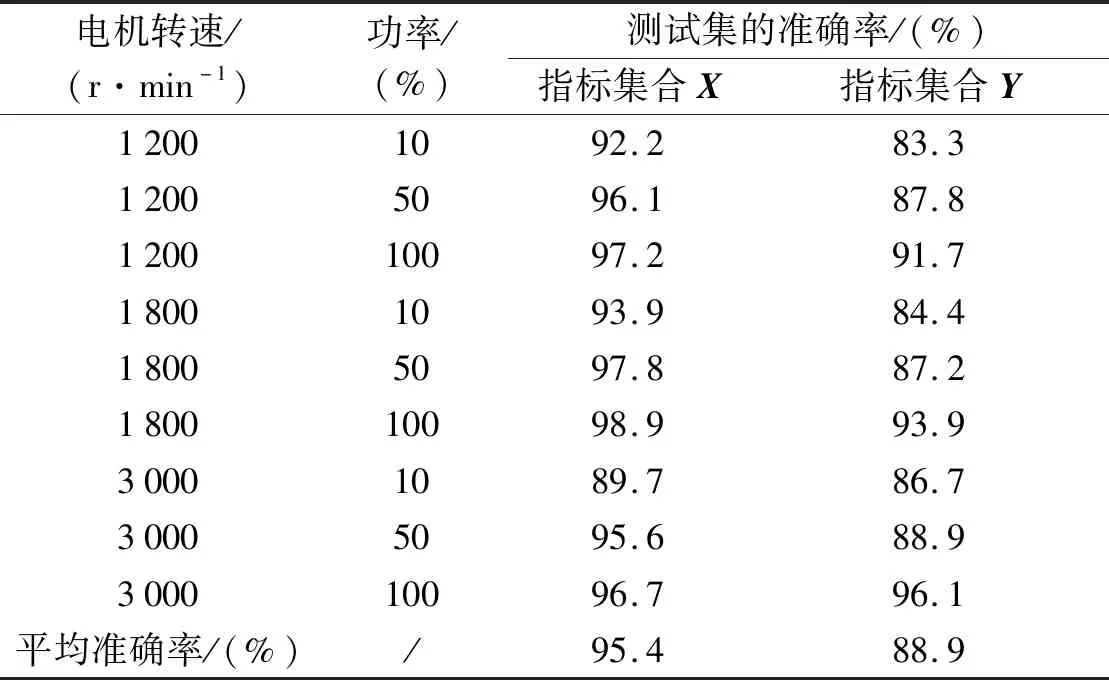
表7 各個檢測器對相應驗證集的準確率
對比分析結果可知:利用筆者提出的指標集合作為MLP神經網絡模型輸入,獲得的檢測器的故障檢測平均準確率高達95.4%;尤其是在低負載工況下,利用筆者所提出的檢測方法獲得的檢測精度更高。
4 結束語
現有的永磁同步電機(PMSM)軸承故障檢測方法存在檢測準確度低的問題,為此,筆者對PMSM軸承故障表征方法和基于神經網絡的檢測方法進行了研究,提出了一種PMSM軸承故障歸一化表征指標集合的構建方法,和一種基于VMD和MLP的PMSM軸承故障檢測方法。
首先,筆者對滾動軸承故障、轉子不對中和電磁力不平衡等故障的頻域特征進行歸一化處理,構建了故障表征指標集合;然后,對振動信號進行了降噪重構,提取了故障頻域特征,并計算出了歸一化指標集合,得到了一種高準確度PMSM軸承故障檢測器;最后,采用試驗的方式對該軸承故障檢測方法的有效性和先進性進行了驗證。
研究結果表明:
(1)通過歸一化滾動軸承故障、轉子不對中故障和電磁力不平衡故障頻域特征的方法,可以構建出具有較強故障表征能力的PMSM軸承故障指標集合,解決了現有指標的故障表征能力不足問題;
(2)通過優化VMD的方法獲取故障表征指標集合,再輸入MLP訓練PMSM軸承故障檢測器的方法,平均檢測準確率可以達到95.4%,解決了現有方法檢測準確率較低問題;
(3)對比分析結果表明,故障歸一化表征指標集合對PMSM軸承故障具有更強的故障表征能力,基于VMD和MLP的方法具有更高的故障檢測準確率,尤其是針對于微弱故障信號。
在今后的工作中,筆者將在考慮軸承故障和轉子動態偏心并存的基礎上,針對電機軸承故障檢測方法進行更深入的研究;同時,就如何更快地獲取最佳的神經網絡模型參數做進一步的研究。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:12:00
數學物理學報(2017年6期)2018-01-22 02:26:40
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
噪聲與振動控制(2015年4期)2015-01-01 07:08:21