被動式電液力系統反步控制算法的簡化研究*
2022-07-18 06:04:44張紹峰金曉宏
機電工程 2022年7期
張紹峰,金曉宏,*,周 園,黃 浩
(1.武漢科技大學 冶金裝備及其控制教育部重點實驗室,湖北 武漢 430081;2.武漢科技大學 機械傳動與制造工程湖北省重點實驗室,湖北 武漢 430081)
0 引 言
被動式電液力系統主要用于模擬實際環境下的復雜載荷[1]。
與主動電液力加載系統不同,被動式電液力系統在工作時,其輸出力由被加載對象的位移決定,且電液力加載系統施力方向總與位置干擾方向相反,使液壓缸在與施力方向相同一側的油腔產生強迫流量,導致進出油腔壓差增大,繼而引起多余力,使力加載系統的穩定性及輸出精度受到影響。
被動式電液力系統首需解決的是抑制位置擾動引起的多余力問題[2];其次,該系統需通過控制策略抑制多余力,所設計的控制器一般含有高階項,其結構較為復雜,致使其在工程上難以實現。
針對被動式電液力系統的以上問題,相關領域的學者已做了大量研究,且成果頗豐。KUMAR C S等人[3]提出了一種基于魯棒的離散時間最小和非最小相位系統的控制公式,并利用基于最大靈敏度的閉環參考模型,通過最小化目標函數,設計了魯棒的低階和高階比例積分微分控制器,以提升系統的魯棒性。CHENG Lei等人[4]對電液力系統采用非線性自適應魯棒控制,使電液力系統具有了良好的魯棒性。YU L等人[5]選用自適應神經模糊推理系統,采用兩類輸入輸出數據對ANFIS模型進行了訓練,提升了系統的跟蹤性能和響應速度。HAOUARI F等人[6]對電液系統采用基于教學學習優化和帶擾動觀測器的反步控制,提高了電液伺服系統的性能。張明偉等人[7]采用在系統結構中加入電液伺服補償閥的方法,利用閥芯逆向運動,排出了強迫流量,大幅度抑制了電液系統多余力。陳帥杰等人[8]在電液力控制系統穩定性研究過程中,采用在回油路串聯阻尼耗能裝置的方法,增加了電液系統的穩定裕度。何龍飛等人[9]分析了含摩擦力的非線性數學模型,使理論模型更加接近實際模型;并設計了雙冪次趨近率的滑模算法,提升了被動式電液力的加載精度。
張明偉、陳帥杰、何龍飛等人都設計了提升電液力系統性能的控制器,控制器均包含位移的三階導數。但其結構組成復雜,導致控制信號難以采集,在工程難以實現。
為了讓該控制器在工程上易于實現,目前主要的思路是設計軟件硬件出錯可能性小、易于理解、計算量小、易于實現的低階控制器;通常使用的控制器降階方法有平衡截斷近似、最優Hankel范數近似、平衡隨機截斷等。
吳艷等人[10]通過結合H∞回路成形與頻率加權平衡截斷的思想,根據在不同頻率的開環傳遞函數奇異值逼近相應的閉環奇異值的回路成形方法,提出了控制器簡化的開環頻率加權平衡截斷法,以使降階后的開環傳遞函數是原開環傳遞函數的良好近似,得到了一個降階的控制器。張旭等人[11]采用高階系統跟蹤經典理想二階系統模型的模型參考自適應方法,降低了參考模型的設計難度,削弱了自適應控制律的復雜程度。SHUO Kang等人[12]提出了一種擾動解耦控制策略,通過解耦位置擾動和減小側隙效應的方法,以此來增強電液力的跟蹤性能;討論了ADD控制器的結構和參數,使控制器優于工業常用控制器。李朝朝等人[13]在基于模型參考自適應算法的基礎上,使被動式電液力系統跟蹤相同階次的三階系統,采用將高階系統簡化為低階系統來做定量估算的主導基點方法,使三階參考模型的特性主要由二階振蕩環節的固有頻率和阻尼比決定,簡化了控制器的結構。
筆者通過對控制信號進行分析,探討對一次反步控制器的簡化方法。
首先,筆者構建非線性加載系統數學模型,推導出反步控制的控制信號;然后,分析控制器的組成項及各項階數,估算控制器控制信號組成項的數量級,通過占比權重來量化分析各項對控制信號性能的影響,精簡控制信號的組成結構,大量削弱高階項系數負載質量對控制信號的負面作用,從而簡化控制器,提升對大質量負載的加載精度;并降低控制器階數,簡化控制器的結構。
1 被動式電液力系統模型描述
被動式電液力加載系統如圖1所示。
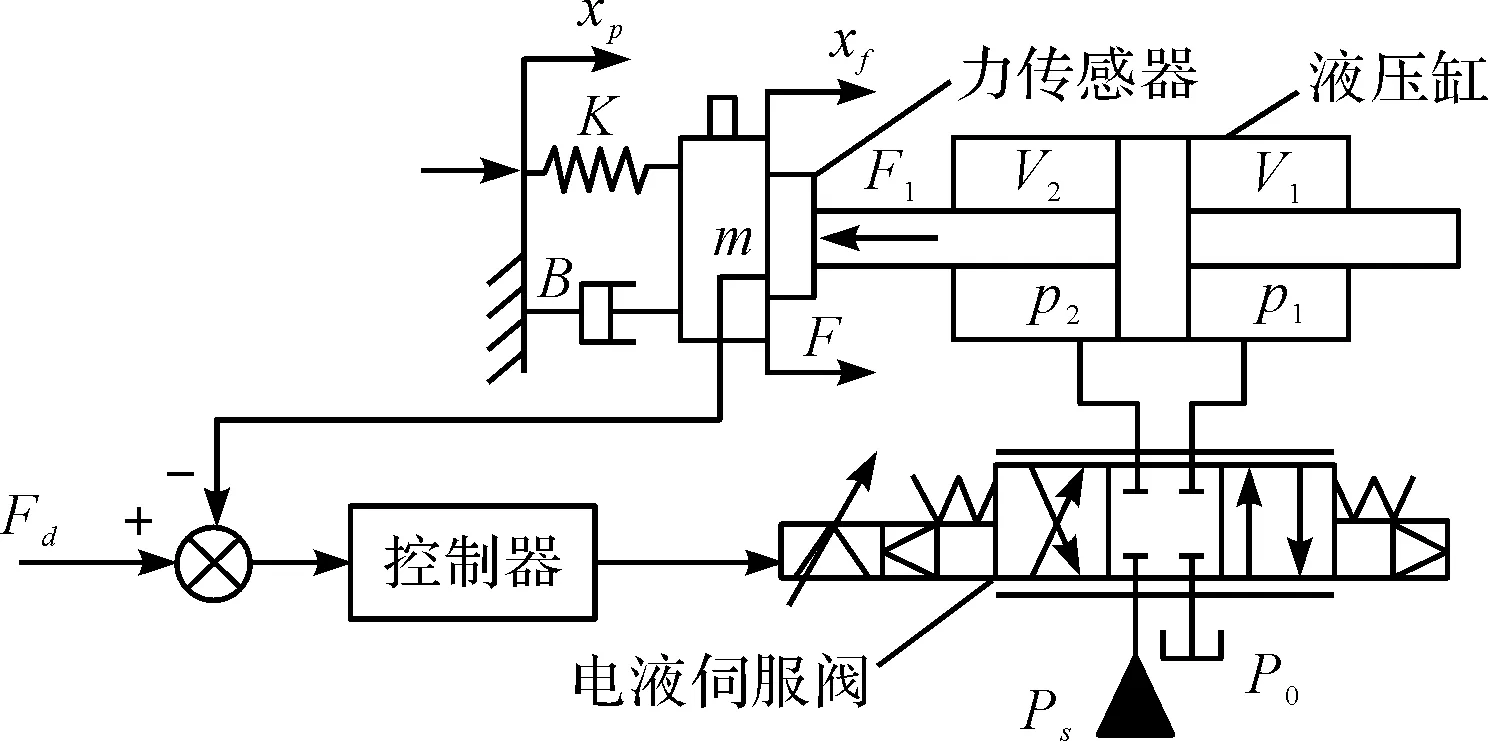
圖1 被動式電液力原理圖
圖1中,輸出力F1的方向向左,活塞向右位移,被動式電液力系統加載執行器進油腔壓力p1大于出油腔壓力p2,在被加載對象強制推動下,活塞被迫向右運動,處于進油狀態的右腔,其體積減小,此時腔內產生了附加的流量,該流量稱為強迫流量;該流量導致右腔壓力在原有p1的基礎上有所增加,力加載系統由于被迫運動,導致兩腔壓力差增大而產生額外的力,稱作多余力;
液壓缸左右兩腔產生的壓差通過活塞桿對壓力傳感器施加壓力F1,壓力傳感器剛性連接施力系統和被施力系統,即可定義力傳感器檢測的力F為電液力系統的輸出力,力傳感器將測得的力信號反饋給輸入端,與期望指令力Fd實時比較,并通過控制器得到電信號u控制伺服閥閥芯位移,形成閉環控制。
電液力通過其跟隨指令信號的過程會受到位置系統的位移干擾,影響電液力系統的穩定性及輸出精度,故控制器的設計目標是使電液力系統的輸出力盡可能精確地跟蹤任意指定的加載指令力。
力傳感器連接電液力系統和被施力系統,定義力傳感器檢測的力為系統輸出力;定義力和位移向右為正方向,F1為液壓缸輸出力,定義力傳感器檢測到的力F為系統輸出力:
F1=ApL
(1)
式中:pL—負載壓力,pL=p2-p1,MPa;A—液壓缸活塞截面積,m2。
(2)
式中:F—系統輸出力,F=K(xf-xP),N;m—負載折合在活塞桿上的綜合質量,kg;B—黏性阻尼系數,N/(m·s-1);xf—力加載系統活塞位移。
將式(1)代入式(2),可得到系統力平衡方程為:
(3)
電液伺服閥采用開口四邊滑閥,左右閥口流量q1和q2分別為:
(4)
式中:xv—伺服閥閥芯位移,m;ω—閥口面積梯度,m;pr—回油壓力,Pa;ps—供油壓力,Pa;p1—液壓缸右腔的壓力,Pa;ρ—液壓密度,kg/m3;Cd—薄壁孔流量系數。
(5)
式中:p2—液壓缸左腔的壓力,Pa。
定義函數s(*)的表達式為:
(6)
為降低控制器設計的復雜性,可將伺服閥和放大器增益看作一個比例環節,則有:
xv=KampKsvu
(7)
式中:u—力加載系統輸入電壓,V;Kamp—伺服閥放大器增益,Kamp=i/u,A/V;Ksv—電液伺服閥增益,Ksv=xv/i,m/A。
圖1中,當活塞右移時,油液流入液壓缸右腔的流量為q1,則流量連續性為:
(8)
式中:V1—右腔實時容積,m3;Ee—油液的有效彈性模量,Pa;Cip—液壓缸內泄漏系數,m3/s。
同理,q2的流量連續性方程為:
(9)
式中:V2—左腔實時容積,m3。
將式(7)代入式(4,5)可得到:
(10)
(11)
將式(10,11)分別代入式(8,9)中,得到伺服閥位移與壓力的關系,并將其代入式(3),可得到關于輸出力的微分方程為:
(12)

2 反步控制器的設計及其簡化
在選取李雅普洛夫函數和控制器設計時,反步控制具有較大的靈活性,通過選取適當的李雅普諾夫函數和設計參數,能夠提升系統的相應品質。
為了使信號容易獲取,工程易于實現,以及避免設計高階系統反步控制器過程中出現的計算爆炸問題,筆者采用基于力反饋的一次反步設計控制器。
為將式(12)簡化,此處定義:
(13)
(14)
(15)
(16)
(17)
即式(12)系統輸出力微分方程為:
(18)
基于系統輸出力反饋,定義Fd為系統期望輸出力,定義系統誤差e=F-Fd,則誤差e對時間的導數為:
(19)
由反步原理所得到的控制器為:
(20)
魏航等人[14]2-3利用伺服閥閥口反向運動,設計了一次反步控制器,其能快速排出強迫流量,對多余力的抑制效果明顯;但其只適用于質量小于2.5 kg的負載,且控制器中含有高階項。
式(20)右邊中的α2、α4、α5分別含有xf的一、二、三階導數,因此,可以把控制信號u看成是關于xf三階系統響應,即u可抽象成:
(21)

為了簡化控制器,必須刪減或簡化控制信號方程中的某些復雜項。為方便證明系統穩定性,筆者在式(20)中嵌入相關項N,通過李雅普諾夫穩定性原理,使相關項N剛好可以等于控制信號方程中的一項或多項,從而達到簡化控制器的目的。
控制信號表達式可寫成如下形式:
(22)
因為任何信號皆可看成正弦信號的數量組合,筆者選用指令力F=2 000sin(4πt)+3 000(N),根據文獻[16]中選用的被動式電液力系統參數,分別計算控制信號u組成項的數值,結果如表1所示。
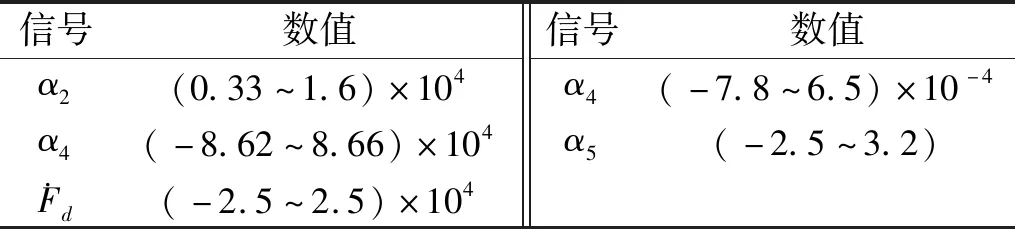
表1 式(20)中各項信號取值范圍

為驗證新控制器的合理性和有效性,選擇合適的李雅普諾夫函數,筆者利用李雅普諾夫穩定性條件分析新控制器的正確性及系統的穩定性。
定義李雅普諾夫函數為:
(23)
將式(23)求導得:
(24)

eN≤0
(25)
為證明式(25)恒成立,下面分兩種情況進行討論:

(26)
令:
(27)
對式(27)求導,即:
(28)

(29)
對式(29)求導有:
(30)
綜上,可得下式恒成立:
(31)
由此可得,有關項N可以為α4+α5的和,在力加載系統中,簡化后的反步控制器的穩定性是可以保證的,即式(20)可簡化為:
(32)
式(20)和式(32)分別為簡化前后的反步控制器表達式。對比式(20)與式(32)可知,簡化后的控制器,控制信號u的結構組成中少了α4和α5兩項,且α4、α5分別為控制器中的二階和三階項的相關項,去除控制器中的α4和α5后,即可消除力系統活塞的加速度及加加速度對控制信號的影響。
可見,控制器簡化后,不僅降低了控制器的階數,還簡化了控制器的結構,在工程中易于實現。
3 控制器性能仿真實驗
為了對簡化后的反步控制器的性能進行檢驗,根據被動式電液力系統數學模型,筆者搭建了一個MATLAB/Simulink數值仿真模型,如圖2所示。
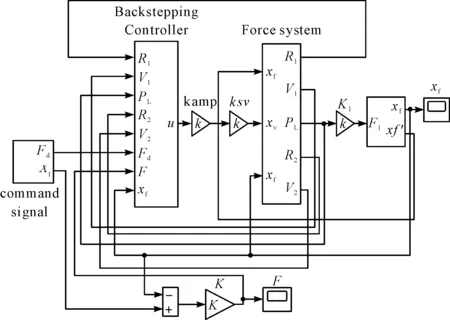
圖2 加入反步控制器的電液力系統Simulink模型
筆者設置步長為1×10-5s,采用ode45算法,計算相對誤差10-6,采用文獻[16]19中的液壓系統參數。此處需將液壓缸活塞等效到負載質量中,實際工況中負載質量通常在50 kg以上,為更好體現出簡化后的控制器性能,筆者在仿真中取負載等效質量為50 kg~150 kg。
液壓系統參數如表2所示。
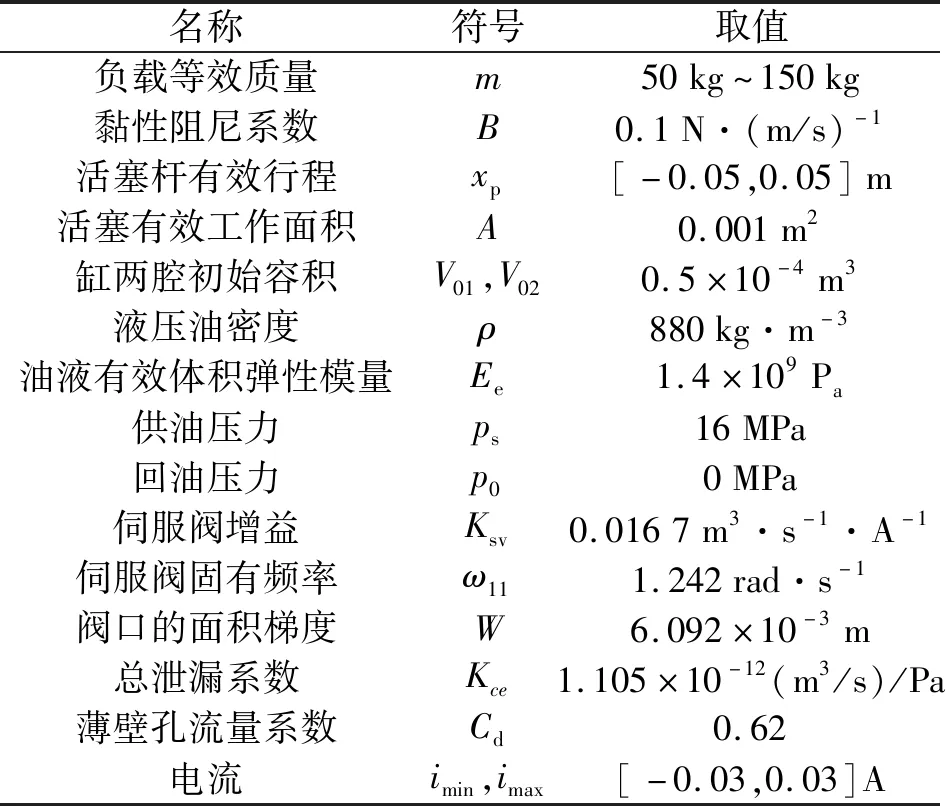
表2 液壓系統參數
為驗證上文中穩定性證明過程的合理性和正確性,保證輸出力可以快速、準確跟蹤指令信號,以及簡化的控制器在位置擾動時能及時、有效地排出強迫流量,筆者特進行以下仿真:
取負載質量m=50 kg,阻尼系數B=0.1,反步系數k=200,指令信號為4 000 N的階躍輸出力,在0.5 s處加入頻率為1 Hz,大小分別為0.002 m、0.004 m和0.006 m的正弦位置擾動。
因為液壓缸是對稱缸,故筆者以右腔V1為仿真對象,得到不同大小的位置擾動下閥口開度參數,如表3所示。

表3 不同大小的位置擾動下閥口開度
在0.5 s加入位置擾動后,伺服閥閥口反向運動,右腔V1變成回油腔排出多余的強迫流量。
在不同大小的位置擾動下,閥口流量特性曲線如圖3所示。
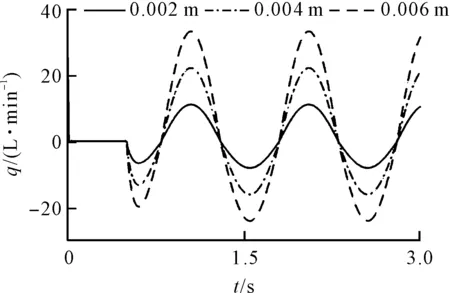
圖3 不同大小的位置擾動下閥口流量特性曲線
由圖3可知:隨著位置擾動的增加,閥口開度增加,及時排出的流量也從隨之增加。
被動式電液力系統首需解決的問題是抑制位置擾動引起的多余力,其次是使工程易于實現。
在受位置擾動的前提下,為了檢驗簡化后的反步控制器能否控制信號平滑穩定,筆者依據表2參數進行以下仿真:取負載質量m=50 kg,阻尼系數B=0.1,反步系數k=200。
負載質量為50 kg時,簡化控制器的輸出電壓U,即控制信號曲線如圖4所示。
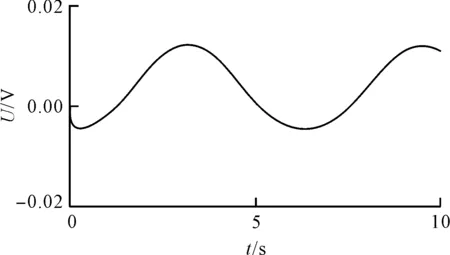
圖4 負載質量為50 kg時簡化控制器的輸出電壓U
為了驗證簡化后的反步控制器對于一定質量負載的控制效果優于未簡化的反步控制器,筆者取負載質量m=50 kg,位置擾動xp=0.001sin(2πt)(m)。
筆者分別對輸出幅值為5 000 N的階躍力反步控制器簡化前后進行對比仿真,結果如圖5所示。
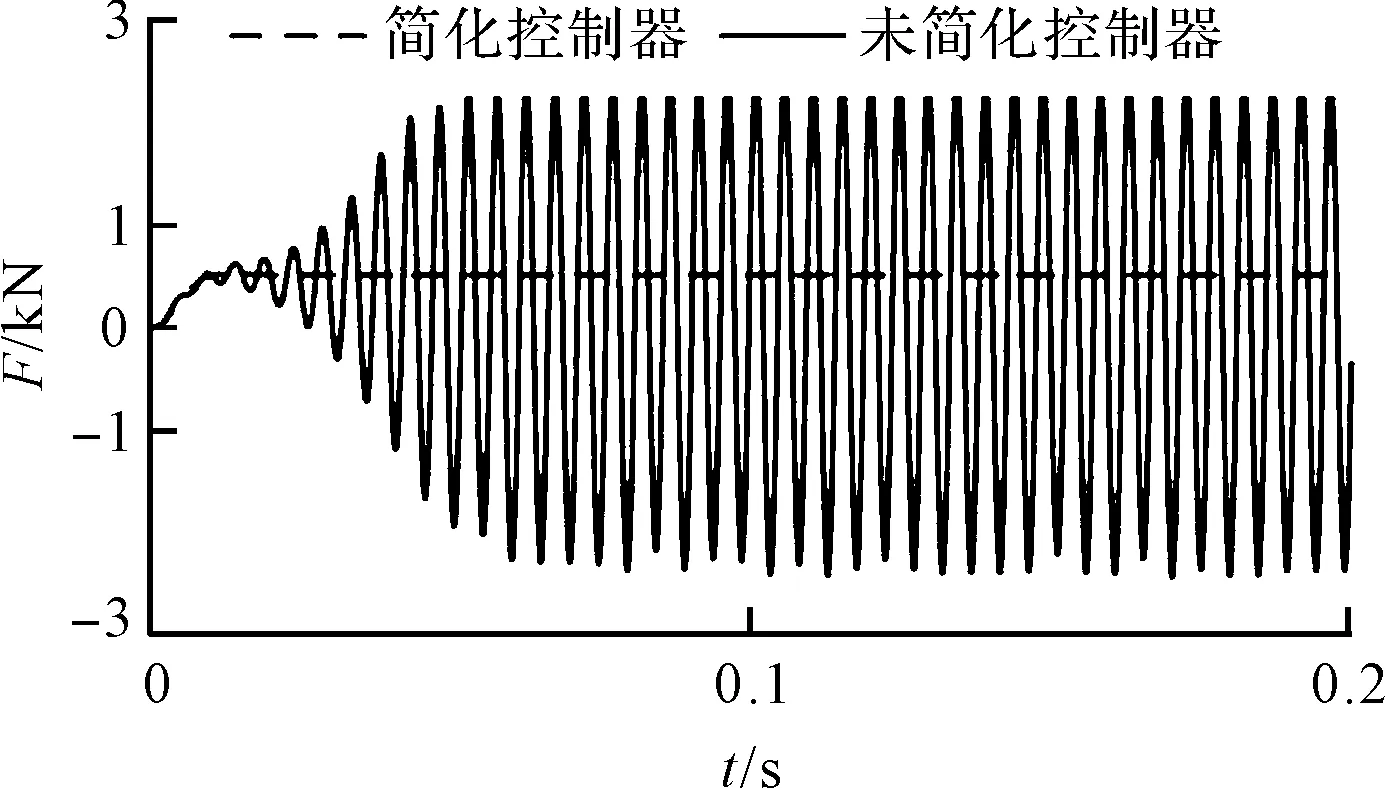
圖5 輸入為階躍信號的輸出力F
簡化后的反步控制器對大質量的負載控制效果很好,最大穩態誤差僅0.22%;而未簡化控制器在負載質量過大時,系統是不穩定的。
為了探究簡化控制器的性能,筆者在系統運動初始階段加入xp=0.001sin(2πt)(m)的正弦信號位置擾動,對PID控制和簡化后的反步控制器的力加載系統進行仿真比較。
在階躍信號下,采用不同控制器得到的系統響應特性,如表4所示。

表4 階躍信號下采用不同控制器的系統響應特性
輸入為階躍信號,采用不同控制器得到的輸出力F,如圖6所示。
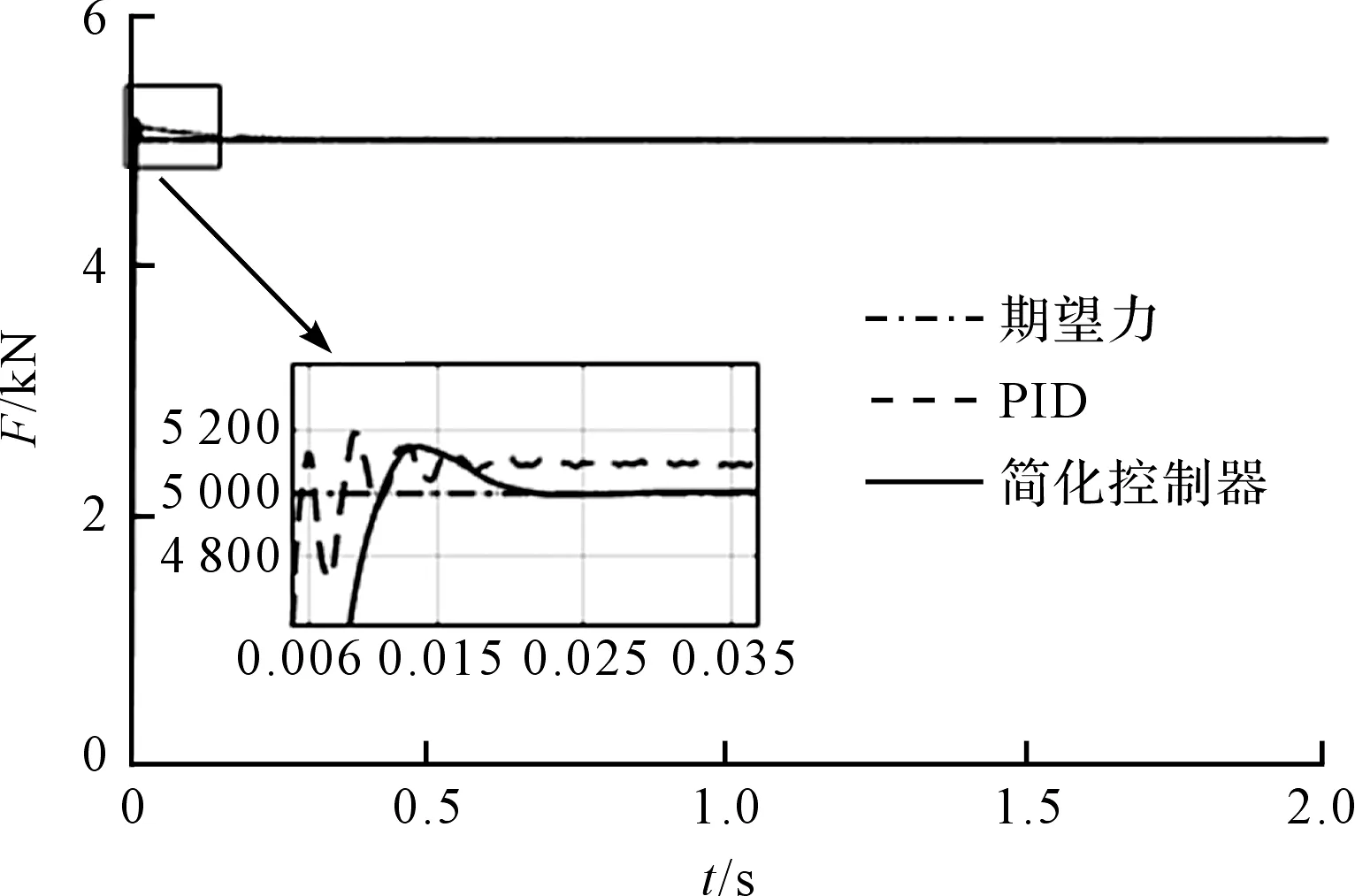
圖6 輸入為階躍信號采用不同控制器的輸出力F
輸入為階躍信號,采用不同控制器得到的跟蹤誤差,如圖7所示。
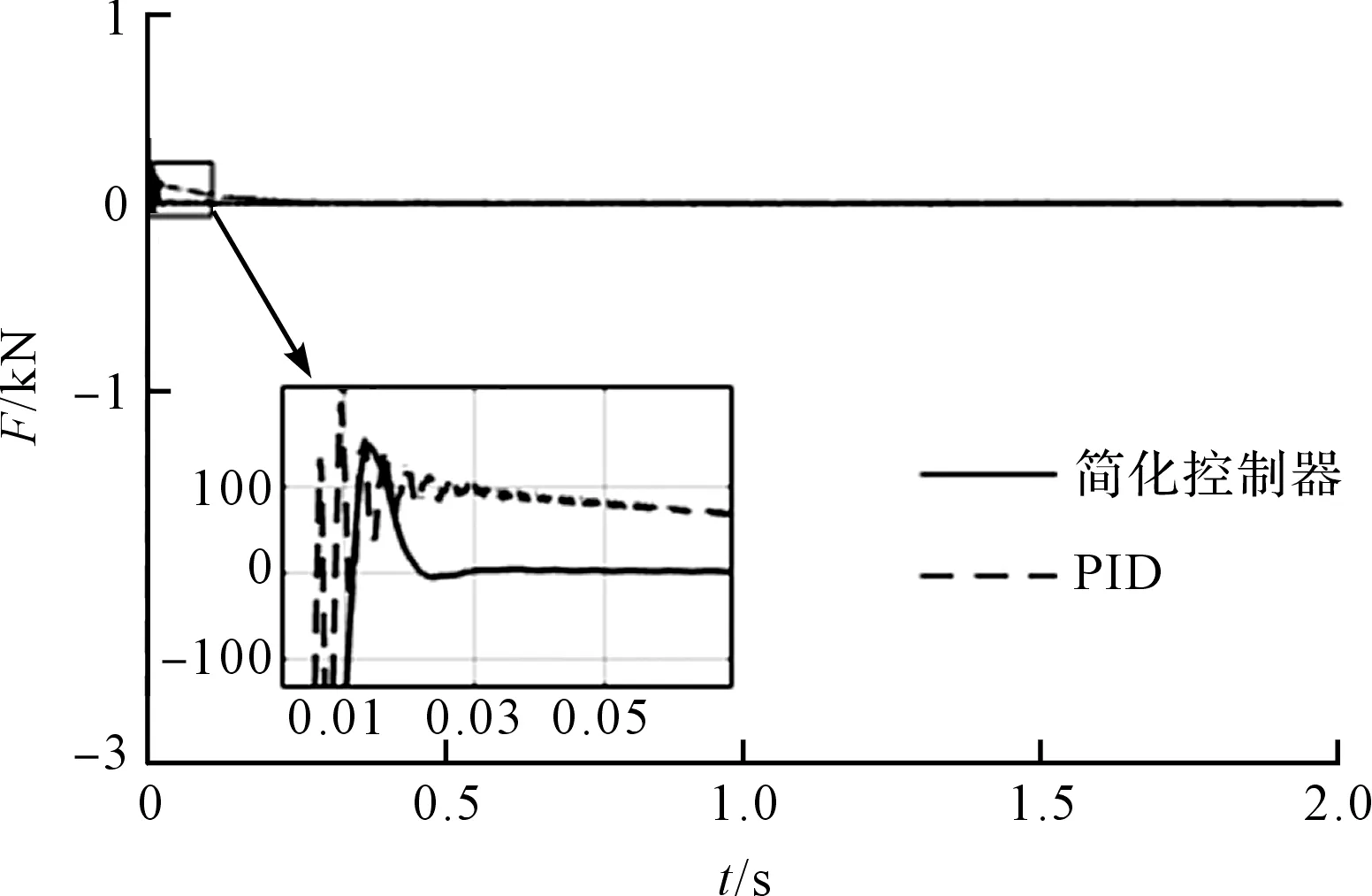
圖7 輸入階躍信號下采用不同控制器的跟蹤誤差
由此可見:簡化后的控制器跟蹤性能十分優越,其在0.011 s后能快速跟蹤指令力,跟蹤誤差逐漸減小;過了0.02 s后,最大誤差僅為0.22%,且最大穩態誤差僅0.22%;而PID控制器的最大穩態誤差達到1.4%,且伴有明顯的振蕩。
為了探究簡化后的控制器對不同質量負載的控制效果,筆者分別取質量m為50 kg、100 kg和150 kg,在系統運動初始時間加入位置擾動xp=0.001sin(2πt)(m),對輸出幅值為5 000 N的階躍力進行仿真,得到的結果如圖8所示。
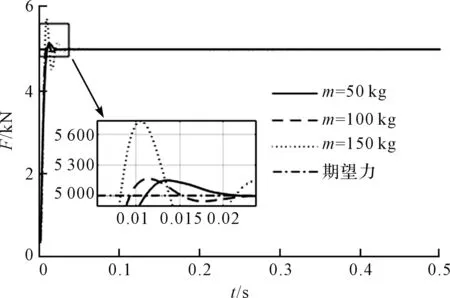
圖8 階躍信號下采用不同質量的系統輸出力F
在階躍信號下,采用不同控制器得到的系統響應特性,如表5所示。
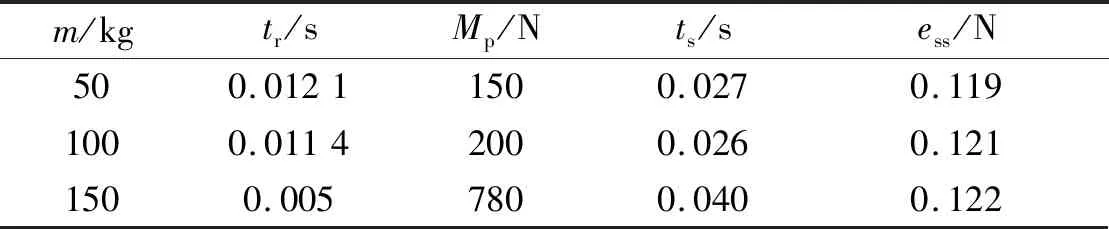
表5 階躍信號下采用不同控制器的系統響應特性
表5中,隨著質量從50 kg增加到150 kg,輸出力的上升時間tr從0.011 s逐漸減少到0.005 s,最大超調量Mp分別為150 N、200 N和780 N;系統達到0.5%的穩態誤差用時分別為0.020、0.026和0.040;穩態誤差ess分別為11.9 N、12.1 N和12.2 N。
由表5可知:隨著質量的增加,系統響應除了最大超調量會明顯增加,其余響應性能只有略微變化。
由于實際工況中,超調量過大會對系統產生沖擊,故筆者取負載質量m=50 kg,取不同的反步系數k進行仿真。
反步控制取不同k值時的系統響應特性如表6所示。
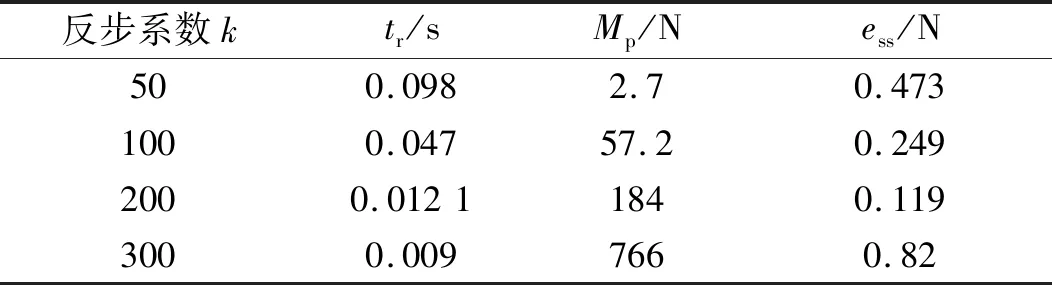
表6 反步控制取不同k值時的系統響應特性
反步控制取不同k值時系統輸出力F如圖9所示。
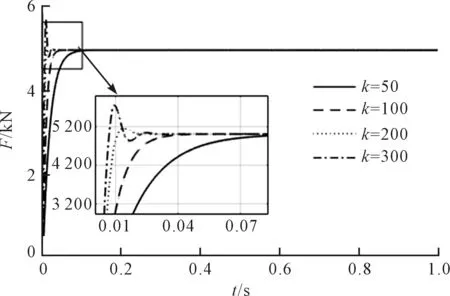
圖9 反步控制取不同k值時系統輸出力F
反步系數k對最大超調量有較大影響,且k越小,最大超調量越小,但是其上升時間會略微增加。
在工程實用中,面臨不同實際工況,在保證設備安全的前提下,要兼顧系統響應品質,因此,筆者選擇適中的反步系數k=200。
為了檢驗簡化控制器對正弦加載指令的跟蹤效果,筆者分別在輸入正弦信號頻率為2 Hz、5 Hz和10 Hz的狀態下進行仿真實驗,并將其結果與采用PID控制器得到的結果進行對比仿真。
輸入指令力為2 Hz時的輸出力F如圖10所示。
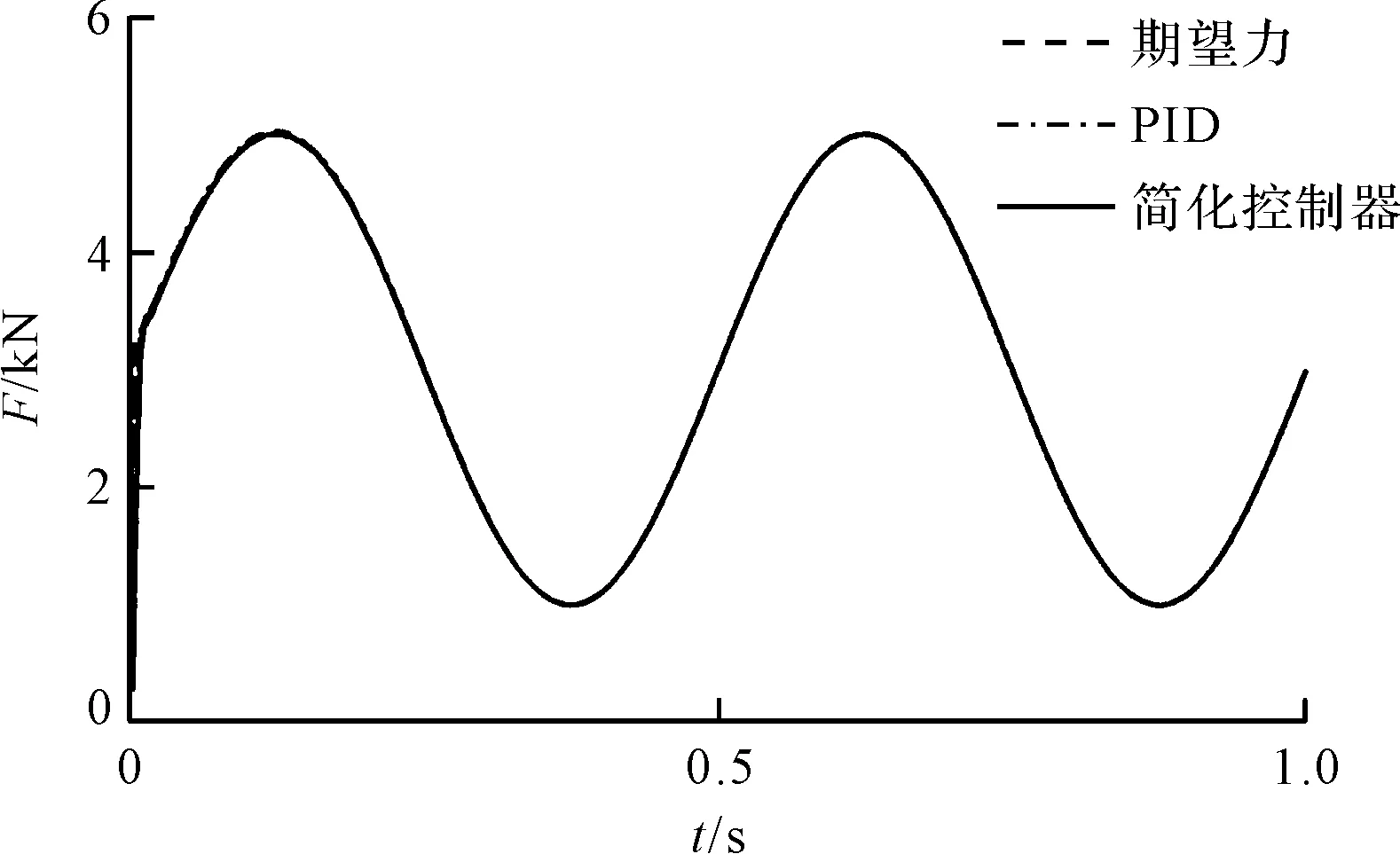
圖10 輸入指令力為2 Hz時的輸出力F
輸入指令力為2 Hz時的輸出力F跟蹤細節圖,如圖11所示。
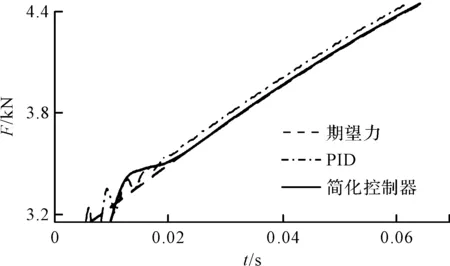
圖11 輸入指令力為2 Hz時的輸出力F跟蹤細節圖
輸入指令力為5 Hz時的輸出力F如圖12所示。

圖12 輸入指令力為5 Hz時的輸出力F
輸入指令力為5 Hz時的輸出力F跟蹤細節圖,如圖13所示。
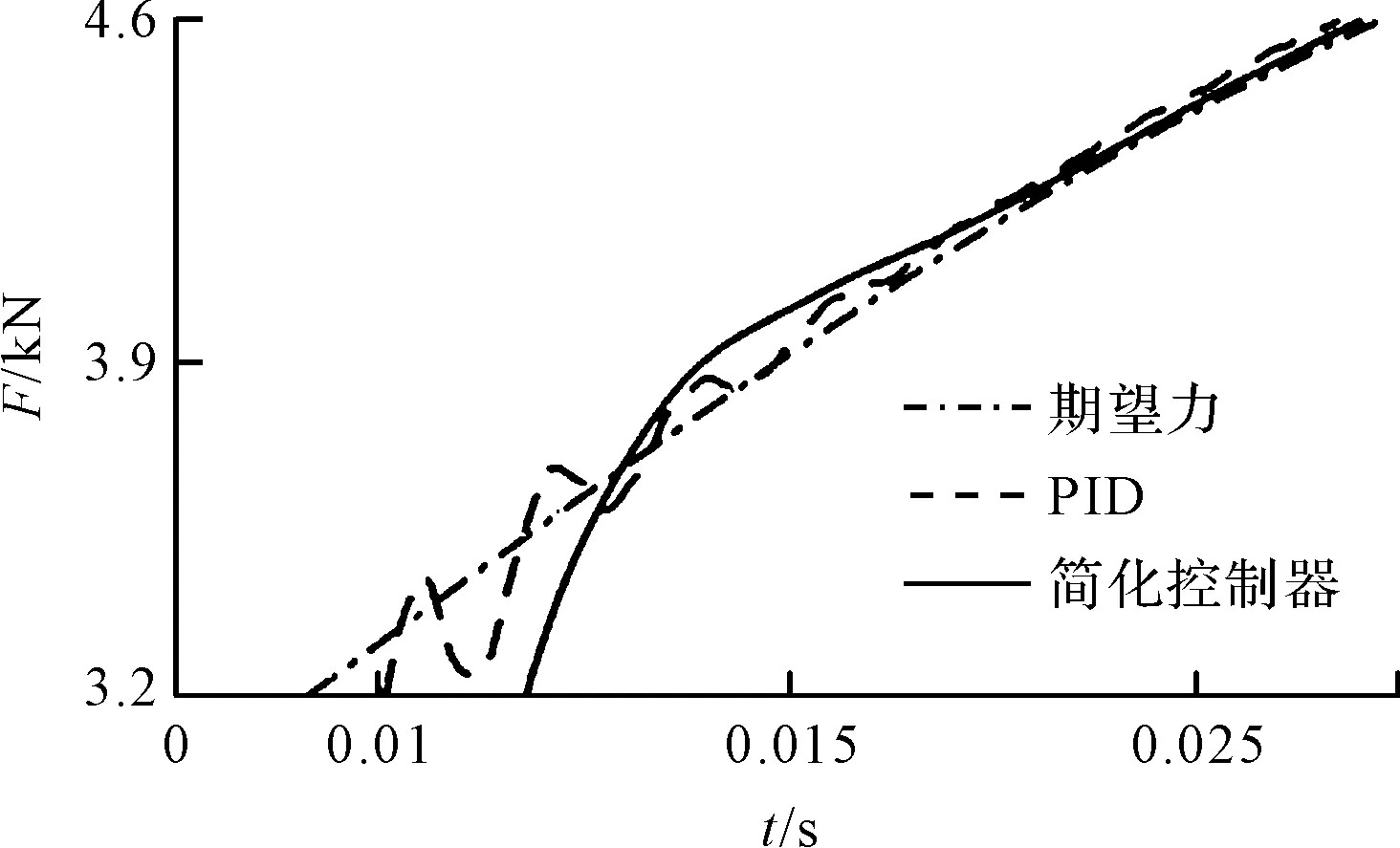
圖13 輸入指令力為5 Hz時的輸出力F跟蹤細節圖
輸入指令力為10 Hz時的輸出力F如圖14所示。
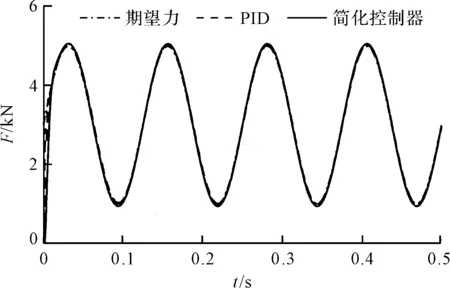
圖14 輸入指令力為10 Hz時的輸出力F
輸入指令力為10 Hz時的輸出力F跟蹤細節圖,如圖15所示。
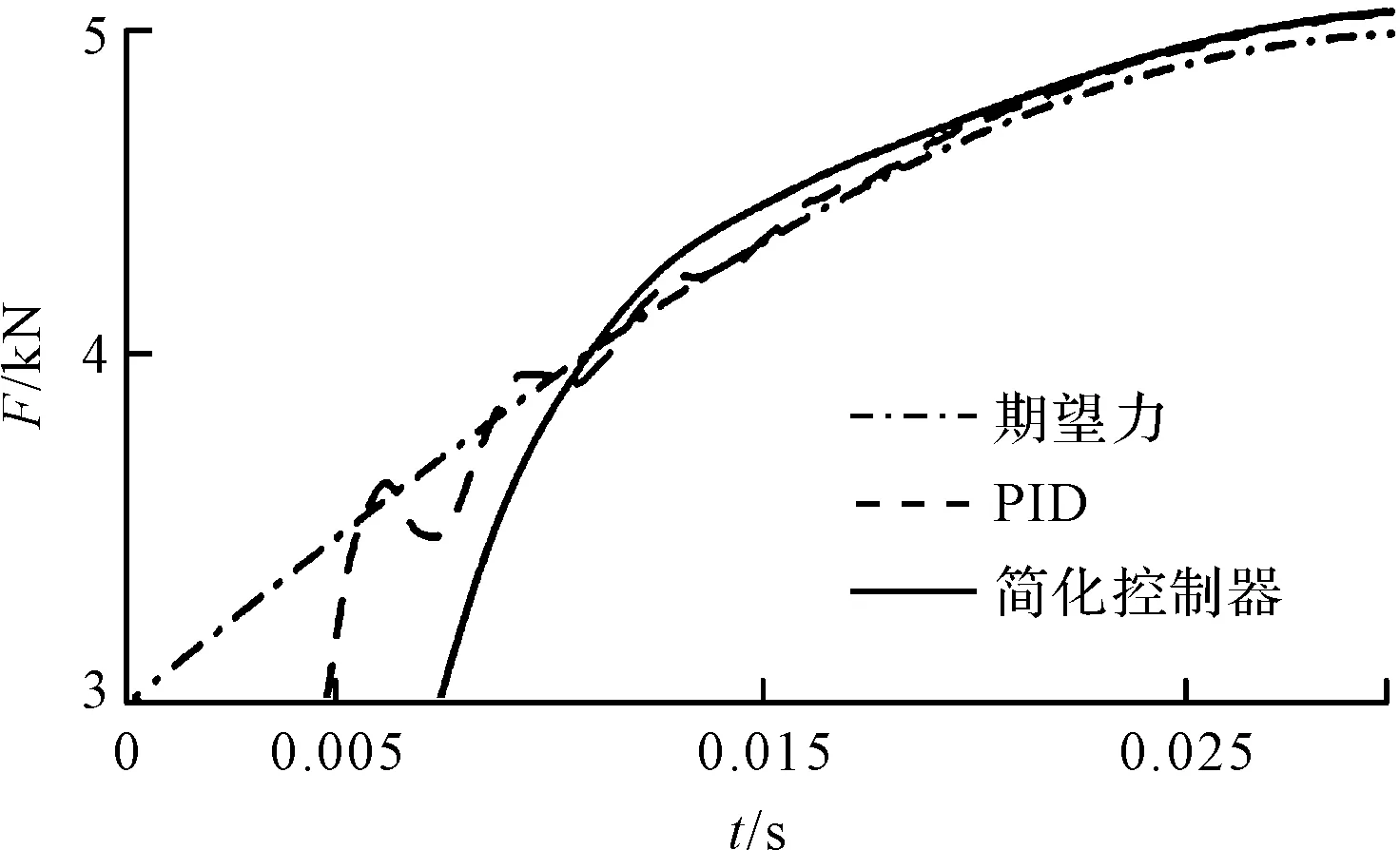
圖15 輸入指令力為10 Hz時的輸出力F跟蹤細節圖
分析上圖可知:隨著正弦指令信號頻率的增加,跟蹤性能會有略微的變差,在2 Hz和5 Hz時,簡化控制器的各項響應品質均優于PID控制,在10 Hz時,簡化控制器的穩態誤差為0.94%,優于PID控制器的穩態誤差1.5%;
最大超調量為112 N,略高于PID控制的最大超調量108 N,但簡化控制器的曲線更為平滑,響應速度更快,上升時間為僅為0.025 s,優于PID控制的上升時間0.028 s。
通過分析表6及圖(13~15)可知:在跟隨頻率為2 Hz和5 Hz的指令信號時,簡化控制器所達到的效果明顯優于PID控制;而指令信號頻率為10 Hz時,超調量及穩態誤差略微劣于PID控制,系統響應速度及穩態誤差依然表現優秀。
4 結束語
被動式電液力加載系統在精度、多余力和大質量負載等方面存在一定的問題,為此,筆者提出了一種針對反步控制器的簡化方法,并采用李雅普諾夫穩定性理論對簡化后的反步控制器的有效性及系統的穩定性進行了驗證,并用MATLAB/Simulink檢驗了控制策略的有效性及控制性能。
研究結論如下:
(1)對比文獻[14]2-3中的控制器,簡化后的控制信號u的結構組成中少了α4和α5兩項,消除了力系統活塞的加速度及加加速度對控制信號的影響,不僅降低了控制器階數,簡化了控制器結構,同時,在對被動式電液力系統控制過程中,控制器的計算量也大幅度減少;
(3)文獻[14]2-3中的控制器僅適用于負載質量小于2.5 kg的場合,而簡化后的控制器大幅度提升了針對負載質量適用的范圍(0~150 kg);隨著負載質量增加,其中輸出力的跟蹤誤差幾乎不變,由此拓展了控制器的適用范圍;
(4)反步系數k對最大超調量有較一定影響,且k越小,最大超調量越小,但是其上升時間會略微增加;為兼顧系統的響應品質及實況設備的安全,選取k=200;
(5)在負載質量m=50 kg,反步系數k=200時,相對于PID控制而言,簡化后的控制器的最大超調量減少17.98%,穩態誤差減少98.23%,調整時間減少86.17%,上升時間減少13.2%。
在工程實用中,面臨不同實際工況,需要調節不同系統參數。因此,在后續的研究中,筆者將結合機器學習算法進行探討,使系統在不同工況下能自適應地選取合適的參數。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25