智能汽車自動(dòng)駕駛的控制方法分析
2022-07-18 07:35:42王相哲
科技創(chuàng)新導(dǎo)報(bào) 2022年5期
王相哲
(電子科技大學(xué) 四川成都 611730)
隨著我國(guó)社會(huì)經(jīng)濟(jì)快速發(fā)展,國(guó)民的生活水平顯著提升,對(duì)汽車的需求逐年激增。現(xiàn)如今,各大車企對(duì)于中國(guó)市場(chǎng)的競(jìng)爭(zhēng)愈加激烈,呈現(xiàn)了電動(dòng)化、網(wǎng)聯(lián)化、智能化、共享化的“新四化”發(fā)展趨勢(shì),“互聯(lián)網(wǎng)+汽車”模式逐漸興起,智能汽車受到廣泛關(guān)注。可以預(yù)見,未來(lái)的一段時(shí)間內(nèi),智能化將是汽車行業(yè)發(fā)展的著力點(diǎn)和風(fēng)向標(biāo)[1]。本文就智能汽車中如何實(shí)現(xiàn)自動(dòng)駕駛控制方法進(jìn)行分析,旨在提高公眾對(duì)自動(dòng)駕駛技術(shù)的了解。
1 汽車自動(dòng)駕駛的相關(guān)概述
1.1 研究背景
近年來(lái),自動(dòng)駕駛科技從觀念策劃之間向現(xiàn)實(shí)運(yùn)用層次穩(wěn)步過(guò)渡,也有很多公司及員工加入到自動(dòng)駕駛科技的探究進(jìn)程中來(lái)。自動(dòng)駕駛概念出現(xiàn)已久,但是自動(dòng)駕駛行業(yè)卻鮮為人知。20世紀(jì)80年代,無(wú)人車Naclab-1首次完成無(wú)人駕駛實(shí)驗(yàn),之后,該型號(hào)車輛被運(yùn)用在廂式貨車上開展探究,無(wú)人車道路試驗(yàn)的相關(guān)法律如雨后春筍般出現(xiàn)。
之后,針對(duì)自動(dòng)駕駛的探究漸漸走入大眾視野。2009年,自動(dòng)駕駛汽車的照片廣為流傳,自動(dòng)駕駛開始受到注重。結(jié)合計(jì)算機(jī)工作的穩(wěn)固性質(zhì)及高科學(xué)性,能夠與自動(dòng)駕駛科技開展一定的結(jié)合,并進(jìn)一步縮減由于駕駛因素引起的事故數(shù)量,與之相結(jié)合的車輛和基本設(shè)備互聯(lián)科技也會(huì)經(jīng)過(guò)車云交互,進(jìn)一步縮減交通堵塞的狀況出現(xiàn)。
所以,各個(gè)國(guó)家出臺(tái)相關(guān)法規(guī),進(jìn)一步給自動(dòng)駕駛的進(jìn)步供應(yīng)便捷。我國(guó)在2015年開展的中國(guó)制造進(jìn)一步加強(qiáng)對(duì)高端制造及智能制造的重視。2019年,國(guó)內(nèi)頒布《汽車產(chǎn)業(yè)中長(zhǎng)期進(jìn)展策劃》,明確了我國(guó)產(chǎn)業(yè)轉(zhuǎn)換升級(jí)的重點(diǎn)便是智能網(wǎng)聯(lián)汽車。在人工智能層次上,美國(guó)在2016年發(fā)布的《國(guó)家人工智能探究以及發(fā)展戰(zhàn)略策劃》進(jìn)一步明確美國(guó)會(huì)繼續(xù)對(duì)人工智能開展探究。2017年,國(guó)務(wù)院發(fā)布了《新一代人工智能進(jìn)展策劃》,提出我國(guó)人工智能進(jìn)展的主要目標(biāo)和綜合規(guī)劃。2018年,科技單位啟用項(xiàng)目審批工作,不斷推進(jìn)人工智能發(fā)展并逐步和傳統(tǒng)企業(yè)相結(jié)合的趨勢(shì)。
1.2 汽車自動(dòng)駕駛的積極意義
自動(dòng)駕駛科技便是運(yùn)用互聯(lián)網(wǎng)對(duì)于公路中出現(xiàn)的各類情況的數(shù)據(jù),開展搜查、解析和處置,在這個(gè)進(jìn)程中,需要用到傳感設(shè)備等相關(guān)設(shè)施。經(jīng)過(guò)解析信息,能夠進(jìn)一步完成汽車自動(dòng)轉(zhuǎn)彎等相關(guān)工作,汽車自動(dòng)駕駛科技在相關(guān)內(nèi)容上能夠進(jìn)一步提升道路的運(yùn)用性質(zhì),進(jìn)一步緩解道路擁堵,特別是道路高峰時(shí)間,在一定程度上能夠緩解交通壓力,使交通用具順利運(yùn)作。
在汽車自動(dòng)駕駛進(jìn)程中,人工智能擔(dān)任駕駛員,人工智能自身判斷,更加嚴(yán)謹(jǐn),進(jìn)一步減小事故的出現(xiàn)概率。我國(guó)的許多汽車公司也開始把中心向汽車自動(dòng)假設(shè)層次轉(zhuǎn)換,在這個(gè)領(lǐng)域投入了許多資金,有效探究并開展探究,成功研發(fā)部分智能汽車。汽車自動(dòng)駕駛也能夠進(jìn)一步推動(dòng)科技的進(jìn)步和提升,汽車自動(dòng)駕駛與當(dāng)代科技息息相關(guān),自動(dòng)假設(shè)科技的進(jìn)步也會(huì)推動(dòng)科技的進(jìn)步,兩者相互協(xié)調(diào)相互進(jìn)步。
1.3 汽車自動(dòng)駕駛的分類
當(dāng)前,國(guó)際無(wú)法統(tǒng)一智能汽車分類準(zhǔn)則,大多運(yùn)用美國(guó)汽車工程師的分級(jí)方式,經(jīng)過(guò)劃分等級(jí)的方式(見圖1),進(jìn)一步展現(xiàn)自動(dòng)駕駛科技的進(jìn)展層次。現(xiàn)有科技大多處于L3 階段。簡(jiǎn)單來(lái)說(shuō),L1、L2 類別的自動(dòng)駕駛屬于輔助設(shè)施,所有的駕駛動(dòng)作需要司機(jī)進(jìn)行完成,智能助手智能在部分場(chǎng)合開展提醒和警示,并沒有操控汽車的功能;但是L3的自動(dòng)駕駛便能進(jìn)一步脫離司機(jī)的操控,自動(dòng)駕駛體系能夠正式接受司機(jī)的運(yùn)作,人們只需要在特別狀況下開展運(yùn)作;而L4~L5 便不再需要人類操控,汽車自身便能夠完成高度運(yùn)作。分類的依據(jù)大多取決于車輛運(yùn)行的道路狀況。

圖1 汽車自動(dòng)駕駛分級(jí)示意圖
2 智能汽車的現(xiàn)狀與問題分析
2.1 智能汽車發(fā)展現(xiàn)狀
汽車智能駕駛屬于智能交通較為活泛的一個(gè)進(jìn)展方向。當(dāng)前,汽車正處于從功能汽車到智能網(wǎng)聯(lián)汽車的進(jìn)展過(guò)程之中。國(guó)內(nèi)外全部汽車生產(chǎn)商都在不斷研究智能汽車及零件,期望自動(dòng)駕駛體系能夠早日運(yùn)行。自動(dòng)駕駛屬于智能汽車進(jìn)展的高級(jí)層次,囊括電資數(shù)據(jù)、自動(dòng)操控、地理位置、車輛項(xiàng)目等多個(gè)科技區(qū)域,屬于當(dāng)前智能交通區(qū)域的首要研究方向。
自動(dòng)駕駛體系給予汽車認(rèn)知、決策及操控等綜合技能,獨(dú)自實(shí)現(xiàn)駕駛?cè)蝿?wù),不需要人類幫助。自動(dòng)駕駛體系大多運(yùn)用各類車載傳感設(shè)施,如計(jì)算機(jī)視覺、雷達(dá)系統(tǒng)、衛(wèi)星導(dǎo)航體系等,進(jìn)一步獲得車輛周圍的數(shù)據(jù)。在數(shù)據(jù)融合方式的基礎(chǔ)上,對(duì)于收集到的交通狀況及行車路線等相關(guān)數(shù)據(jù)開展整合。之后,經(jīng)過(guò)智能決策策劃方式,為自動(dòng)駕駛汽車策劃出一條高效、便捷的道路和速度。之后,經(jīng)過(guò)對(duì)于自動(dòng)駕駛汽車開展運(yùn)動(dòng)把控,自動(dòng)調(diào)整油門等相關(guān)設(shè)備,完成對(duì)于路線的行駛,從而確保汽車運(yùn)行的有效性和合理性。
一個(gè)優(yōu)秀的自動(dòng)駕駛體系應(yīng)該像人類司機(jī)一樣,能夠?qū)囕v運(yùn)行及周邊交通狀況開展判斷,能動(dòng)的改變航行路線,完成駕駛?cè)蝿?wù)。目前來(lái)看,在未來(lái)很長(zhǎng)一段時(shí)間內(nèi),自動(dòng)駕駛科技仍舊較難大范圍普及。但是,在某些特殊場(chǎng)合中的自動(dòng)駕駛在逐漸運(yùn)用,如集裝箱運(yùn)輸、農(nóng)業(yè)器械等,無(wú)人化的自動(dòng)駕駛科技改變了原有的繁雜、費(fèi)時(shí)的工作方式,進(jìn)一步提高的便捷性和效率性。
2.2 新能源汽車智能化發(fā)展中存在的問題
隨著現(xiàn)代化的不斷進(jìn)步,汽車行業(yè)數(shù)字化變革在不斷進(jìn)行,汽車不再是單純的交通用具,更屬于一個(gè)智慧空間。新能源汽車的智能化在多個(gè)方面獲得有效進(jìn)展,但與此同時(shí),也有著一定的負(fù)面影響需要完善和改良。
2.2.1 配套政策不完備,數(shù)據(jù)隱私安全堪憂
雖然互聯(lián)網(wǎng)科技較為高效,但是智能網(wǎng)聯(lián)也引起了部分隱私問題。伴隨滲透智能重點(diǎn)的相關(guān)信息在不斷提高,黑客侵入并改變數(shù)據(jù)的可能性也在不斷上升。智能網(wǎng)聯(lián)的出現(xiàn)使出行更加便捷的同時(shí),也在收集車主的相關(guān)信息,智能網(wǎng)聯(lián)體系除了會(huì)供應(yīng)地圖導(dǎo)航以外,還可能會(huì)進(jìn)一步推薦保險(xiǎn)等無(wú)用信息,這些信息的來(lái)源與車主每日的行車軌跡息息相關(guān)。
2.2.2 基礎(chǔ)設(shè)施不完善,智能化發(fā)展受限制
智能共享帶來(lái)便利的同時(shí),對(duì)于安全也具備一定的影響。新冠疫情還未完全消失,結(jié)合疫情防控要求,運(yùn)營(yíng)商家需要對(duì)共享汽車開展固定效度,同時(shí),還需要確保用戶的車輛需求得到滿足,需要運(yùn)營(yíng)商對(duì)于共享車輛開展有效科學(xué)的調(diào)整以及運(yùn)用把控。
3 智能汽車自動(dòng)駕駛的控制與執(zhí)行
3.1 橫向控制
橫向把控是指對(duì)于汽車自動(dòng)駕駛進(jìn)程中運(yùn)動(dòng)方向的把控。橫向把控的完成離不開汽車運(yùn)轉(zhuǎn)動(dòng)力學(xué)模型的支撐,也就是說(shuō),汽車轉(zhuǎn)向動(dòng)力學(xué)屬于一類精準(zhǔn)程度更高的汽車橫向運(yùn)動(dòng)模型,模仿司機(jī)轉(zhuǎn)向運(yùn)作經(jīng)驗(yàn)進(jìn)一步獲得橫向把控算法。圖2所示是某類智能自動(dòng)駕駛商用汽車轉(zhuǎn)換體系構(gòu)造圖,在以往的轉(zhuǎn)向體系前提下,進(jìn)一步增添了ECU 把控單元,作為整車中的一個(gè)執(zhí)行機(jī)構(gòu),ECU 把控部門一方面接受來(lái)自整車把控設(shè)備的轉(zhuǎn)向指令,如轉(zhuǎn)向角度及速度等相關(guān)要素,除此之外,ECU 把控單元必需實(shí)時(shí)檢察整車現(xiàn)實(shí)的轉(zhuǎn)向狀況并完成反饋,經(jīng)過(guò)轉(zhuǎn)向體系,事先設(shè)計(jì)相關(guān)的把控算法,完成實(shí)時(shí)完善、做到閉環(huán)把控等效用,使汽車行駛過(guò)程中的安全性進(jìn)一步提升。
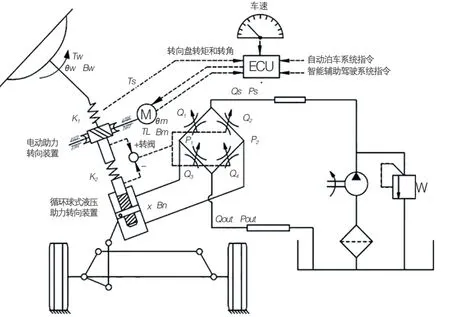
圖2 智能自動(dòng)駕駛汽車轉(zhuǎn)向系統(tǒng)構(gòu)件圖
3.2 智能汽車自動(dòng)駕駛車輛道路狀況識(shí)別
自動(dòng)駕駛汽車的運(yùn)作進(jìn)程中,對(duì)于道路情況數(shù)據(jù)的認(rèn)知和處置是保證自動(dòng)假設(shè)汽車行駛的主要保障,只有保證自動(dòng)駕駛汽車可以有效對(duì)道路狀況開展認(rèn)知,才可以進(jìn)一步發(fā)揮車輛運(yùn)作監(jiān)督的作用。如圖3所示,為智能汽車自動(dòng)駕駛車輛監(jiān)察控制中的道路識(shí)別。自動(dòng)駕駛車輛的道路情況認(rèn)知所運(yùn)用的是狀態(tài)認(rèn)知監(jiān)察把控系統(tǒng),即依據(jù)車輛運(yùn)作監(jiān)察把控需求對(duì)道路的情況開展認(rèn)知。以點(diǎn)t作為車輛監(jiān)督運(yùn)作中的時(shí)刻,在狀況監(jiān)督的前提下,和道路情況認(rèn)知系統(tǒng)相結(jié)合,進(jìn)一步保證為汽車駕駛監(jiān)督打下優(yōu)質(zhì)基礎(chǔ)。

圖3 智能汽車自動(dòng)駕駛道路識(shí)別示意圖
3.3 濕式線控制動(dòng)系統(tǒng)
為了進(jìn)一步適應(yīng)自動(dòng)駕駛汽車對(duì)于制動(dòng)體系性能的高需求,采埃孚在以往制動(dòng)產(chǎn)品的基礎(chǔ)上開展不斷創(chuàng)新,開發(fā)出了全新、可持續(xù)濕式線把控體系產(chǎn)品,進(jìn)一步推動(dòng)自動(dòng)駕駛進(jìn)展。與此同時(shí),確保客戶的滿意度和安全,集成化制動(dòng)把控體系跟隨時(shí)代腳步,與制動(dòng)科技的發(fā)展方向相適應(yīng),進(jìn)一步滿足了全球汽車工業(yè)對(duì)于安全及自動(dòng)化駕駛的需要,支持更高等級(jí)無(wú)人駕駛科技,與綠色環(huán)保、自動(dòng)化等產(chǎn)業(yè)導(dǎo)向相適應(yīng)。
3.4 集成自動(dòng)駕駛傳感器的智能車頂模塊
自動(dòng)駕駛傳感設(shè)備在車輛上的有效裝置對(duì)于車輛方位感知環(huán)境具有重要意義。除此之外,傳感設(shè)備必須得到有效維護(hù),免于雪、泥等因素的損壞。在和主機(jī)廠及自動(dòng)駕駛策劃供應(yīng)商的商策過(guò)程中,偉巴斯特確定車頂是裝置自動(dòng)駕駛傳感設(shè)備的理想位置。這個(gè)方案在保證傳感設(shè)備有效性及耐用性的同時(shí),對(duì)于汽車企業(yè)的好處更加顯著:一個(gè)“接口”,汽車企業(yè)不用考慮對(duì)于傳感設(shè)備的布置,經(jīng)過(guò)預(yù)標(biāo)定,能夠大范圍縮減車企的裝置時(shí)長(zhǎng),進(jìn)一步提升產(chǎn)出效率。與此同時(shí),智能車頂還具備能夠開啟天窗的功能,滿足了消費(fèi)者對(duì)于舒適性與可靠性的需求。
3.5 人工智能技術(shù)可以滿足人們的個(gè)性化、安全性的需求
智能科技囊括的數(shù)據(jù)較為廣泛,這之中便囊括精準(zhǔn)度較高的地圖及準(zhǔn)確的導(dǎo)航和定位。人工智能之中的道路數(shù)據(jù)較為精準(zhǔn)且繁雜,這樣,在行駛進(jìn)程中人工智能便能把道路數(shù)據(jù)反饋給駕駛?cè)藛T,而且人工智能可以在這些復(fù)雜的道路數(shù)據(jù)中獲得一條有效的道路。人工智能可實(shí)現(xiàn)有效更新,在行駛進(jìn)程中能夠判斷地方道路情況,并了解各個(gè)道路的現(xiàn)實(shí)狀況。在外出的時(shí)候,這類科技能夠進(jìn)一步為人們供應(yīng)精準(zhǔn)的路線,確保人們可以向正確反向運(yùn)行。同時(shí),該行駛路線會(huì)排除線路等相關(guān)狀況,進(jìn)一步節(jié)省時(shí)間,提升效率。
在道路行駛進(jìn)程中,假設(shè)遇見突然狀況,人工智能科技會(huì)事先發(fā)出警告,并提出相關(guān)建議。對(duì)于部分習(xí)慣通過(guò)自動(dòng)駕駛科技把握主動(dòng)權(quán)的人來(lái)講,人工智能科技會(huì)把各類狀況反饋給自動(dòng)駕駛體系,自動(dòng)駕駛系統(tǒng)會(huì)在這類數(shù)據(jù)上開展解析并做出正確決定。在行駛進(jìn)程中,人工智能科技會(huì)不斷調(diào)整自我,在行駛進(jìn)程中遇到其余沒有錄入的狀況,人工智能科技會(huì)將其收入自身的數(shù)據(jù)庫(kù)之中,便于下次的決策。
4 結(jié)語(yǔ)
自動(dòng)駕駛技術(shù)作為一項(xiàng)涉及汽車構(gòu)造、傳感器技術(shù)、信息通信、人工智能等多個(gè)學(xué)科的綜合應(yīng)用,需要不斷開展相關(guān)研究,需要社會(huì)各界的通力合作和相互交流。它的出現(xiàn)改變了人們對(duì)汽車駕駛的認(rèn)知,雖然全工況的自動(dòng)駕駛還有很長(zhǎng)的路要走,但是,隨著科學(xué)技術(shù)的發(fā)展,自動(dòng)駕駛技術(shù)終將會(huì)逐步完善和實(shí)現(xiàn)。
猜你喜歡
商界(2019年12期)2019-01-03 06:59:05
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
少兒科學(xué)周刊·兒童版(2017年9期)2018-03-15 15:00:11
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2017年4期)2017-06-30 12:41:53
小康(2017年16期)2017-06-07 09:00:59
南風(fēng)窗(2016年19期)2016-09-21 16:51:29
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2016年6期)2016-08-19 06:35:19
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年10期)2016-01-20 00:47:36
