智能駕駛硬件計(jì)算平臺及CAN通信軟件設(shè)計(jì)
2022-07-21 20:17:36李升凱吳長水
軟件工程 2022年7期
李升凱 吳長水

摘 ?要:為了給智能駕駛功能軟件提供高算力、實(shí)時(shí)性強(qiáng)、接口豐富的軟硬件解決方案,以實(shí)現(xiàn)超聲波和視覺融合泊車為硬件平臺開發(fā)目標(biāo),選取TI的TDA系列作為平臺系統(tǒng)級芯片,選取英飛凌的TC277芯片作為實(shí)時(shí)控制芯片,設(shè)計(jì)了一款智能駕駛計(jì)算平臺。所設(shè)計(jì)的硬件平臺成功實(shí)現(xiàn)了12路超聲波雷達(dá)、四路廣角攝像頭的數(shù)據(jù)采集,支持CAN、車載以太網(wǎng)、LIN通信。基于此硬件平臺,按照AUTOSAR標(biāo)準(zhǔn)開發(fā)了計(jì)算平臺與汽車底盤域控制器的高速CAN通信軟件,可實(shí)現(xiàn)多報(bào)文周期性穩(wěn)定收發(fā),滿足通信需求。本文所開發(fā)的智能駕駛計(jì)算平臺為后續(xù)相關(guān)開發(fā)提供了基礎(chǔ)。
關(guān)鍵詞:智能駕駛;計(jì)算平臺;TC277芯片;CAN通信;AUTOSAR
中圖分類號:TP393 ? ? 文獻(xiàn)標(biāo)識碼:A
Intelligent Driving Hardware Computing Platform and
CAN Communication Software Design
LI Shengkai, WU Changshui
(School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China)
1443828638@qq.com; yantz_wu@163.com
Abstract: In order to provide software and hardware solutions with high computing power, strong real-time performance and rich interfaces for intelligent driving function software, this paper proposes to design an intelligent driving computing platform, which aims to realize the hardware platform development goal of parking with ultrasonic and visual fusion. TI's TDA (Texas Instruments' TDA) series is selected as the platform system-level chip, and Infineon's TC277 chip is used as a real-time control chip. The proposed hardware platform successfully realizes data acquisition of 12-channel ultrasonic radar and four-channel wide-angle camera, and it supports CAN (Controller Area Network), vehicle Ethernet, LIN (Local Interconnect Network) communication. Based on this hardware platform, the high-speed CAN communication software between the computing platform and the vehicle chassis domain controller is developed based on AUTOSAR standard, which realizes the periodic and stable sending and receiving of multiple messages, and meets the communication requirements. The proposed intelligent driving computing platform provides the basis for the follow-up related development.
Keywords: intelligent driving; computing platform; TC277 chip; CAN communication; AUTOSAR
1 ? 引言(Introduction)
隨著智能駕駛的迅速發(fā)展,軟件定義汽車的時(shí)代已經(jīng)到來。傳統(tǒng)汽車的分布式電子電氣架構(gòu)已不能滿足軟件快速更新迭代的要求,汽車電子電氣架構(gòu)由分布式向集中式發(fā)展,形成了以域?yàn)閱挝坏挠?jì)算及控制單元,大大簡化了汽車以往復(fù)雜的內(nèi)部電子電氣架構(gòu)[1]。
在此背景下,全球各大傳統(tǒng)車企、新勢力車企、零部件供應(yīng)商、半導(dǎo)體供應(yīng)商及軟件公司開始投身于智能駕駛的開發(fā)。而智能駕駛計(jì)算平臺作為智能駕駛領(lǐng)域的“大腦”,對其軟硬件進(jìn)行開發(fā)具有戰(zhàn)略意義。智能駕駛計(jì)算平臺是結(jié)合車輛線控平臺和大量多類型傳感器的核心,須具有多接口類型的特點(diǎn)。多傳感器數(shù)據(jù)融合、人工智能算法等技術(shù)對計(jì)算平臺的接口及算力都有著更高的要求,因此目前智能駕駛計(jì)算平臺都采用異構(gòu)多核芯片作為核心處理器[2]。市面上已量產(chǎn)的計(jì)算平臺采用的核心處理器主要分為三個流派,即以英偉達(dá)、特斯拉、高通為代表的CPU+GPU+ASIC架構(gòu),以Mobileye、華為、地平線等為代表的CPU+ASIC架構(gòu),以百度、Waymo為代表的CPU+FPGA架構(gòu)。本文以實(shí)現(xiàn)自動泊車功能為目標(biāo),選取TI的TDA2P及英飛凌的TC277為主控芯片,設(shè)計(jì)了一款高性能智能駕駛計(jì)算平臺,并按照AUTOSAR標(biāo)準(zhǔn)開發(fā)了CAN通信軟件,可實(shí)現(xiàn)基本的數(shù)據(jù)收發(fā),為國內(nèi)智能駕駛計(jì)算平臺的開發(fā)提供了參考方案。
2 計(jì)算平臺硬件設(shè)計(jì)(Computing platform hardware design)
2.1 ? 開發(fā)目標(biāo)
本文旨在開發(fā)一款基于視覺傳感器和雷達(dá)傳感器結(jié)合的智能駕駛計(jì)算平臺,可支持多種ADAS(Advanced Driver Assistance System)功能、部分智能網(wǎng)聯(lián)功能(L2+),實(shí)現(xiàn)包括主動安全系統(tǒng)、環(huán)視系統(tǒng)及自動泊車輔助系統(tǒng)的功能。主動安全系統(tǒng)采用前視攝像頭和毫米波雷達(dá)作為感知層方案,環(huán)視系統(tǒng)采用環(huán)視攝像頭方案,自動泊車輔助系統(tǒng)采用超聲波和環(huán)視攝像頭融合方案。本計(jì)算平臺開發(fā)的功能如下:
(1)與車上其他控制器進(jìn)行CAN/ETH通信,以實(shí)現(xiàn)數(shù)據(jù)的交互。
(2)具備多路車載攝像頭采集接口,以實(shí)現(xiàn)多角度圖像采集與處理。
(3)能夠進(jìn)行視頻圖像數(shù)據(jù)的輸出,以實(shí)現(xiàn)人機(jī)交互。
(4)能夠?qū)崿F(xiàn)與12路超聲波雷達(dá)的數(shù)據(jù)交互。
(5)能夠?qū)崿F(xiàn)與組合導(dǎo)航系統(tǒng)(IMU、RTK、GNSS高精度接收機(jī))進(jìn)行數(shù)據(jù)交互。
(6)能夠?qū)崿F(xiàn)與一路毫米波雷達(dá)進(jìn)行數(shù)據(jù)交互。
(7)具備以太網(wǎng)接口,以實(shí)現(xiàn)與計(jì)算平臺外部進(jìn)行通信。
(8)支持兩路LIN總線通信。
2.2 ? 芯片選型
文本采用德州儀器的TDA2P視覺處理芯片進(jìn)行復(fù)雜算法的執(zhí)行及大量數(shù)據(jù)的計(jì)算,其采用多核異構(gòu)的設(shè)計(jì)架構(gòu),既有助于視覺加速的EVE單元,又有助于數(shù)字信號處理的DSP,更重要的是其具備十分完善的基于嵌入式系統(tǒng)車載視覺系統(tǒng)技術(shù)開發(fā)的應(yīng)用軟件[3],為開發(fā)者提供完備的系統(tǒng)開發(fā)工具及必備的應(yīng)用軟件。采用英飛凌TC277芯片作為計(jì)算平臺的控制芯片,該芯片具有三個處理核心,支持四路CAN通信、車載以太網(wǎng)通信、LIN通信,滿足開發(fā)目標(biāo)。此外為滿足大量的數(shù)據(jù)處理需求,計(jì)算平臺采用NXP公司的SJA1105五端口以太網(wǎng)交換機(jī)方案,實(shí)現(xiàn)了計(jì)算平臺內(nèi)部的高速通信,同時(shí)對外提供兩路100 Mbits/s及一路千兆RJ45接口。
2.3 ? 硬件電路架構(gòu)
本文按照開發(fā)目標(biāo)在完成芯片選型后設(shè)計(jì)了計(jì)算平臺的硬件架構(gòu),如圖1所示,以兩塊主控芯片為核心模塊設(shè)計(jì)了數(shù)據(jù)采集、數(shù)據(jù)通信、顯示、存儲等各個子模塊。
其中各處理器的主要任務(wù)如下:
(1)TDA2P負(fù)責(zé)完成自動泊車的數(shù)據(jù)融合、規(guī)劃決策等算法運(yùn)行、四路廣角攝像頭數(shù)據(jù)采集、組合定位系統(tǒng)數(shù)據(jù)采集及運(yùn)行Linux等復(fù)雜操作系統(tǒng)。
(2)TC277負(fù)責(zé)完成控制算法、12路超聲波雷達(dá)數(shù)據(jù)采集、與底盤域進(jìn)行CAN通信等對實(shí)時(shí)性要求較高的任務(wù)。
在顯示模塊的設(shè)計(jì)中,設(shè)計(jì)了一路HDMI接口用來進(jìn)行攝像頭的調(diào)試,留有一路視頻輸出接口用于連接汽車中控大屏顯示環(huán)視影像。在存儲模塊設(shè)計(jì)中,主要包含存儲ROM及運(yùn)行RAM的設(shè)計(jì)。由于TDA2P[4]支持多種方式啟動,本文分別設(shè)計(jì)了eMMC及TF卡作為存儲ROM。SOC芯片需運(yùn)行復(fù)雜操作系統(tǒng)Linux、自動泊車的感知和規(guī)劃決策算法,并采集處理大量攝像頭數(shù)據(jù),所以需外接大容量運(yùn)行內(nèi)存。本文對滿足泊車功能所需的運(yùn)行內(nèi)存進(jìn)行充分驗(yàn)證,最終得出結(jié)論,系統(tǒng)至少需提供1.1 GB的運(yùn)行空間,才能保證泊車功能的正常運(yùn)行。基于此,本文設(shè)計(jì)平臺的運(yùn)行內(nèi)存為2 GB,選用MICRON公司的DDR3L-MT41K256M16TW芯片。TC277支持四路CAN通信,本文將四路都引出接口,一路用于和底盤域通信,其他幾路用于診斷、標(biāo)定及硬件在環(huán)測試。主控芯片通信方案按照冗余原則進(jìn)行設(shè)計(jì),采用了SPI、UART及車載以太網(wǎng)通信方式,為軟件冗余設(shè)計(jì)提供了選擇。
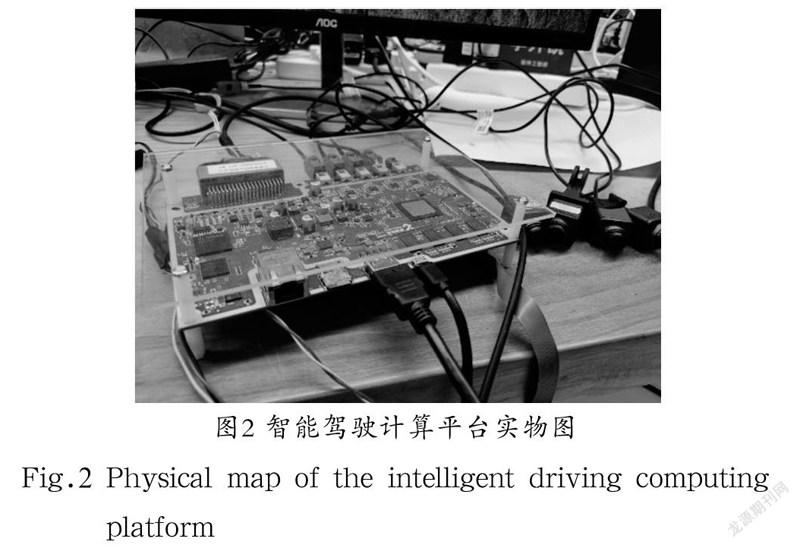
如圖2所示為本文開發(fā)的智能駕駛計(jì)算平臺實(shí)物,基于此硬件平臺進(jìn)行CAN軟件設(shè)計(jì)并測試。
3 ?CAN通信軟件設(shè)計(jì)(CAN communication software design)
3.1 ? CAN通信模塊軟件架構(gòu)
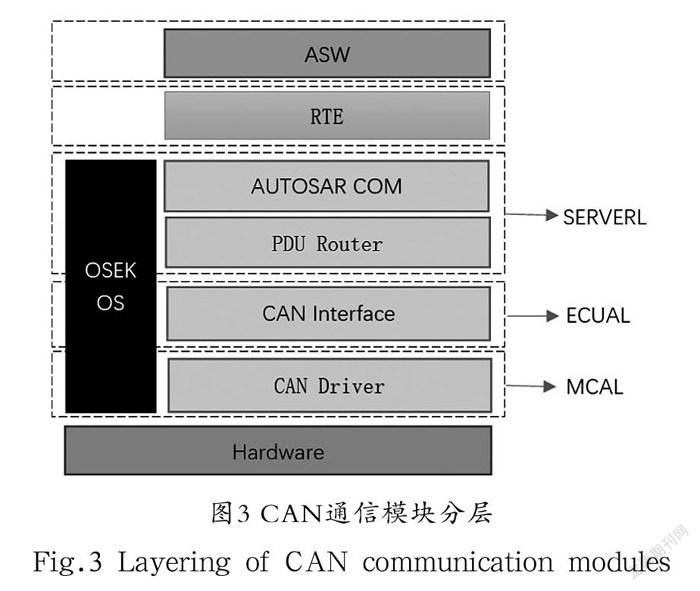
按照AUTOSAR分層思想,本平臺開發(fā)所涉及的CAN通信模塊各層分布如圖3所示,CAN Driver位于微控制器通信抽象層,CAN Interface位于通信硬件抽象層,PDU Router與AUTOSAR COM位于通信服務(wù)層,OSEK OS位于系統(tǒng)服務(wù)層,在通信模塊中負(fù)責(zé)提供周期調(diào)度服務(wù)[5]。
CAN Driver位于通信功能模塊最底層,是訪問CAN硬件資源的唯一接口,主要負(fù)責(zé)設(shè)置通道的位速率、位定時(shí)參數(shù)及CAN控制器的工作模式,設(shè)定數(shù)據(jù)的存放位置,訪問CAN模塊相關(guān)寄存器等[6]。
CAN Interface將硬件資源抽象化,使得軟硬件分離,其上層模塊必須經(jīng)過CAN Interface處理才能訪問硬件[7]。
PDU Router主要起到過渡兼容的作用,根據(jù)I-PDU標(biāo)識符實(shí)現(xiàn)其上層與下層不同模塊之間信息的路由。此外,PDU Router還可提供網(wǎng)關(guān)功能,使得不同總線之間進(jìn)行通信。本文按照AUTOSAR標(biāo)準(zhǔn)開發(fā)通信模塊,目前僅限于與底盤域控制器進(jìn)行CAN通信,所以PDU Router僅于COM層交互。
AUTOSAR COM主要起到信號接口與數(shù)據(jù)網(wǎng)關(guān)的作用,負(fù)責(zé)發(fā)送上層的信號組,解析從下層接收的數(shù)據(jù)并通知上層[8]。
3.2 ? CAN底層收發(fā)過程實(shí)現(xiàn)
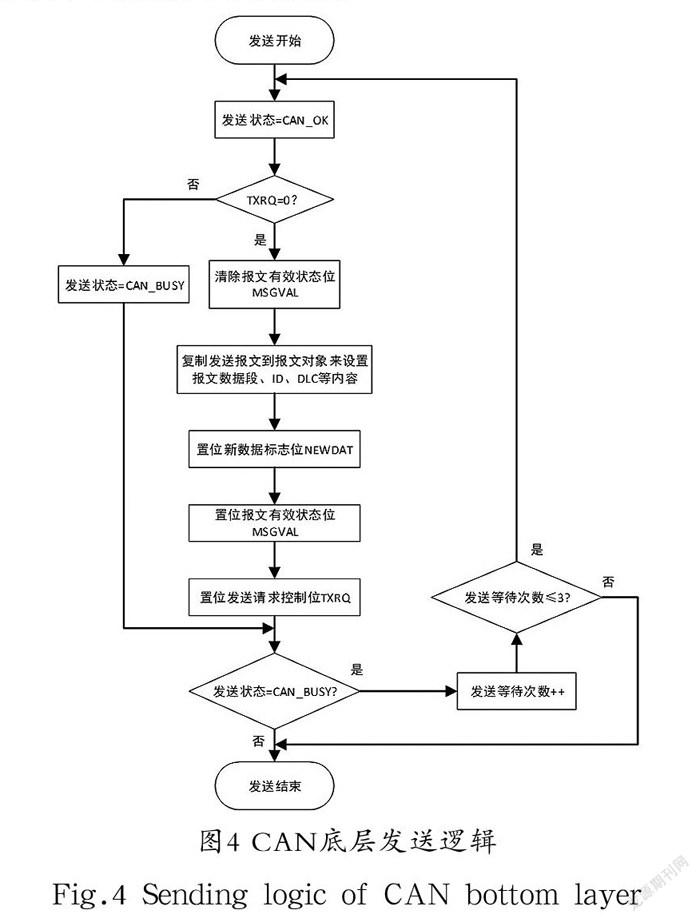
在CAN發(fā)送模塊初始化后,具體的發(fā)送判斷邏輯如圖4所示。首先設(shè)置發(fā)送狀態(tài)為CAN_OK,CPU判斷發(fā)送請求標(biāo)志位TXRQ是否為零,如果TXRQ置位則說明之前的報(bào)文因CAN總線繁忙或離線等問題未被發(fā)送,此時(shí)CPU需要將發(fā)送狀態(tài)設(shè)置為CAN_BUSY。反之,TXRQ為零說明此時(shí)對應(yīng)的報(bào)文對象處于可發(fā)送報(bào)文狀態(tài),CPU首先需清除報(bào)文有效狀態(tài)位MSGVAL,Multican停止對報(bào)文對象的寫訪問,此時(shí)CPU可重新配置報(bào)文對象,不受Multican的干擾。接下來將要發(fā)送報(bào)文的報(bào)文數(shù)據(jù)、ID、DLC、IDE等信息賦值給報(bào)文對象控制寄存器,此時(shí)CPU將對應(yīng)報(bào)文對象的新數(shù)據(jù)標(biāo)志位NEWDAT置位以表明報(bào)文對象內(nèi)容為新。設(shè)置完報(bào)文對象后要將報(bào)文有效狀態(tài)位MSGVAL置位才能實(shí)現(xiàn)報(bào)文的發(fā)送,最后將發(fā)送請求控制位TXRQ置位實(shí)現(xiàn)報(bào)文的發(fā)送。因存在總線忙碌或斷線的可能,本文設(shè)置發(fā)送等待次數(shù)最多為三次,最終將CAN幀的發(fā)送狀態(tài)通過回調(diào)函數(shù)返回給CAN接口層再向上層通知,實(shí)現(xiàn)報(bào)文可靠發(fā)送。
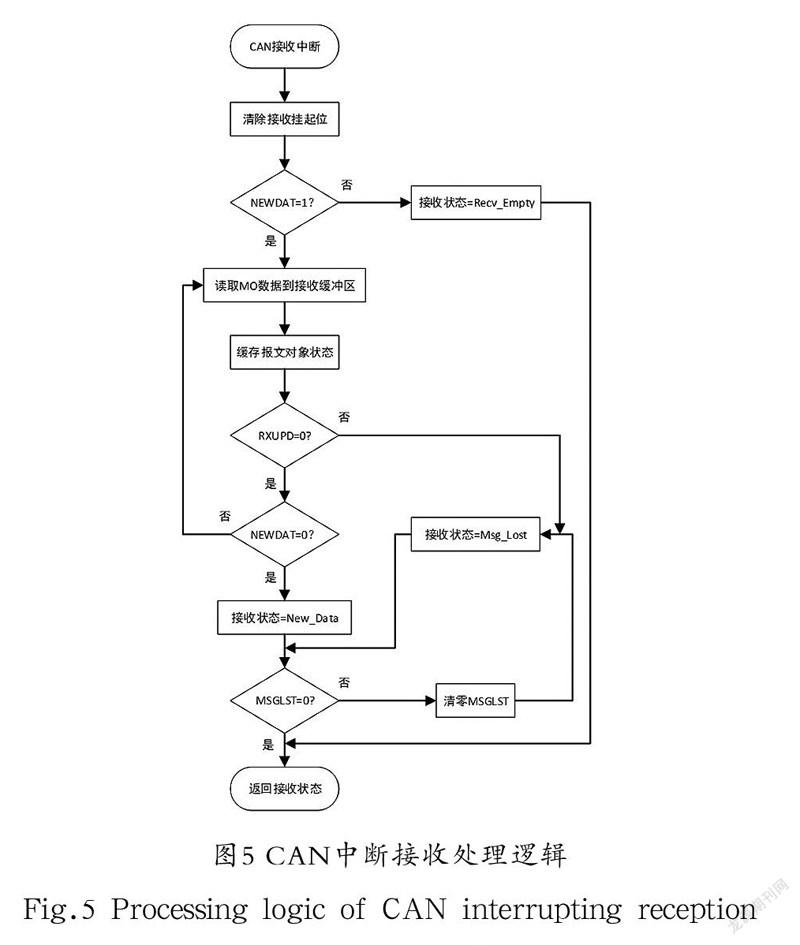
如圖5所示,當(dāng)接收到新的CAN幀后接收掛起位RXPND被硬件置位進(jìn)入中斷程序,首先CPU需軟件復(fù)位接收掛起位RXPND,接著判斷新數(shù)據(jù)標(biāo)志位NEWDAT是否置位,如果NEWDAT未置位表明此時(shí)查詢的報(bào)文對象無數(shù)據(jù)更新,將返回接收狀態(tài)為Recv_Empty;而如果NEWDAT置位則表明此報(bào)文對象接收到新的數(shù)據(jù),接下來讀取此報(bào)文對象的數(shù)據(jù)(數(shù)據(jù)場、報(bào)文ID、報(bào)文長度碼DLC)到接收緩沖區(qū),為了降低報(bào)文丟失的概率緩存報(bào)文對象的狀態(tài)用于后續(xù)的數(shù)據(jù)一致性判斷。由于在讀取數(shù)據(jù)的過程中存在數(shù)據(jù)被再次開始更新的可能,使得最終讀取到的接收緩沖區(qū)的數(shù)據(jù)是新舊數(shù)據(jù)的組合,這樣會導(dǎo)致數(shù)據(jù)不一致,所以Multican具有保持其與CPU之間數(shù)據(jù)一致性的機(jī)制,通過聯(lián)合判斷NEWDAT和RXUPD狀態(tài)位可有效解決數(shù)據(jù)不一致的問題。在讀取數(shù)據(jù)后,要判斷接受更新狀態(tài)位RXUPD是否置位,如果置位表明此時(shí)發(fā)生了數(shù)據(jù)更新,需返回接收狀態(tài)為報(bào)文丟失Msg_Lost;而如果RXUPD未發(fā)生置位,則表明剛剛讀取到的接收緩沖區(qū)的數(shù)據(jù)有效,再檢查報(bào)文丟失標(biāo)志位MSGLST是否為零,如果MSGLST為零表明報(bào)文順利接收,如果MSGLST置位表明報(bào)文數(shù)據(jù)丟失。最終將CAN幀的接收狀態(tài)通過回調(diào)函數(shù)返回給CAN接口層再向上層通知,實(shí)現(xiàn)報(bào)文可靠接收。
4 ?計(jì)算平臺CAN收發(fā)功能測試(CAN transceiver function test of computing platform)
此處采用虹科公司的CAN卡PCAN-USB對CAN通信電路及CAN通信軟件進(jìn)行功能測試。如圖6所示為設(shè)備的實(shí)物圖,此設(shè)備通過USB接口將PC連接到CAN網(wǎng)絡(luò),可用于監(jiān)控CAN網(wǎng)絡(luò)[9],發(fā)送、保存、過濾CAN報(bào)文,且價(jià)格較Vector工具鏈更低,滿足本文測試CAN網(wǎng)絡(luò)的需求。
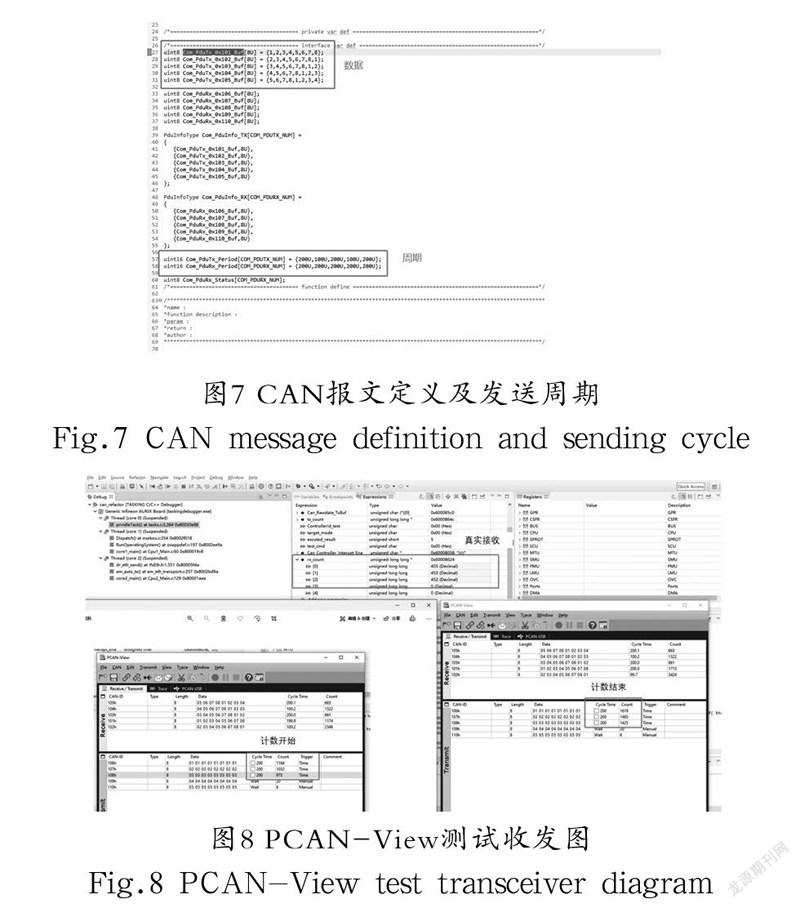
本文定義收發(fā)報(bào)文各五條,如圖7所示定義了各報(bào)文的ID、發(fā)送報(bào)文內(nèi)容及發(fā)送周期。使用PCAN進(jìn)行CAN報(bào)文的收發(fā)測試,如圖8所示為IDE及PCAN-View上位機(jī)軟件界面。先對本計(jì)算平臺的CAN報(bào)文接收功能進(jìn)行測試,使用PCAN-View分別周期性發(fā)送ID為0x106、0x107、0x108、0x109、0x110的CAN報(bào)文,在IDE中觀測收到各報(bào)文的數(shù)量,由圖8可知計(jì)算平臺可保證報(bào)文不丟包。再對計(jì)算平臺的CAN報(bào)文發(fā)送功能進(jìn)行測試,如圖8所示在PCAN-View軟件中開啟報(bào)文濾波,只接收ID為0x101、0x102、0x103、0x104、0x105的CAN報(bào)文,上位機(jī)軟件可按定義的發(fā)送周期及內(nèi)容接收來自計(jì)算平臺發(fā)送的CAN報(bào)文。
5 ? 結(jié)論(Conclusion)
本文以實(shí)現(xiàn)自動泊車為開發(fā)目標(biāo),設(shè)計(jì)了一款智能駕駛硬件計(jì)算平臺,具有豐富的通信接口,可實(shí)現(xiàn)大量傳感器數(shù)據(jù)的采集及復(fù)雜泊車算法的運(yùn)行。基于此平臺,按照AUTOSAR標(biāo)準(zhǔn)設(shè)計(jì)了CAN通信軟件,經(jīng)測試,可保證此計(jì)算平臺與汽車底盤域控制器的CAN通信穩(wěn)定運(yùn)行,為后續(xù)智能駕駛計(jì)算平臺的研發(fā)提供了基礎(chǔ)。
參考文獻(xiàn)(References)
[1] 馮曉輝,王哲,李雅琪.智能駕駛領(lǐng)域發(fā)展態(tài)勢與展望[J].人工智能,2018(06):26-36.
[2] 王敏,付建寬,宗巖,等.高級別自動駕駛汽車計(jì)算平臺綜述[J].時(shí)代汽車,2021(22):30-32.
[3] 王振宇.基于TDA2x的疲勞駕駛監(jiān)測及行為識別算法研究與應(yīng)用[D].成都:電子科技大學(xué),2021.
[4] SANKARAN J, ZORAN N. TDA2X, a SoC optimized for advanced driver assistance systems[C]// IEEE. International Conference on Acoustics, Speech and Signal Processing(ICASSP). Florence, Italy: IEEE, 2014:2204-2208.
[5] 董碧成,石春,吳剛.基于AUTOSAR的電動汽車中央控制單元CAN通信軟件開發(fā)[J].儀表技術(shù),2021(04):65-70.
[6] 宋波,王安軍,王正樹.符合AUTOSAR規(guī)范的MCU驅(qū)動設(shè)計(jì)和實(shí)現(xiàn)[J].汽車零部件,2011(03):55-56,60.
[7] 李艷明,倪永亮,李申,等.基于AUTOSAR標(biāo)準(zhǔn)的車輛電氣系統(tǒng)CAN通信協(xié)議棧研究[J].計(jì)算機(jī)測量與控制,2017,25(11):239-243.
[8] 馮川,胡杰,顏伏伍,等.符合AUTOSAR標(biāo)準(zhǔn)的CAN底層通信研究[J].武漢理工大學(xué)學(xué)報(bào)(信息與管理工程版),2013,35(06):842-845,855.
[9] 余其濤.基于AUTOSAR標(biāo)準(zhǔn)的CAN通信棧設(shè)計(jì)與實(shí)現(xiàn)[D].上海:上海交通大學(xué),2016.
作者簡介:
李升凱(1996-),男,碩士生.研究領(lǐng)域:汽車電子嵌入式.
吳長水(1978-),男,博士,副教授.研究領(lǐng)域:汽車電子控制.