繞組阻值變化對SRM無位置傳感器控制的影響研究
2022-07-21 11:53:50王浩楠蔡燕
科技創新導報 2022年5期
王浩楠 蔡燕




摘要:開關磁阻電機的繞組往往會受環境溫度、潮濕氧化等條件的影響,導致其阻值發生變化,本文研究分析了基于簡化磁鏈法的無位置傳感器控制中,電機繞組阻值變化對位置估計結果的影響,并提出了一種利用PI算法在線自動修正繞組阻值的方法,以提高位置估計的精度,最后以一臺三相12/8極的開關磁阻電機為樣機進行了仿真研究。研究結果表明:采用本文提出的電阻修正方法,能夠有效減小因繞組阻值變化導致的位置估計誤差。
關鍵詞:開關磁阻電機 ?無位置傳感器控制 ?阻值變化 ?簡化磁鏈法
中圖分類號:TM352
Research on Influence of Winding Resistance Change on SRM PositionSensorless Control
WANG Haonan ?CAI Yan
(School of Electrical Engineering, Tiangong University, Tianjin, 300387 China)
Abstract:?The winding of switched reluctance motor is often affected by ambient temperature, moisture oxidation and other conditions, resulting in the change of its resistance. This paper studies and analyzes the influence of the change of motor winding resistance on the position estimation result in the position sensorless control based on the simplified flux linkage method, and a method of using the PI algorithm to automatically correct the winding resistance online is proposed to improve the accuracy of the position estimation. Finally, a three-phase 12/8-pole switched reluctance motor is?used as a prototype for simulation research. The research result shows?that the resistance correction method proposed in this paper can effectively reduce the position estimation error caused by the change of winding resistance.
Key Words: Switched reluctance motor; Position sensorless control; Resistance change; Simplified flux linkage method
開關磁阻電機Switched Reluctance Motor,SRM)是一種采用無稀土材料,低成本驅動的電機,具有結構簡單、魯棒性好的特點,被廣泛應用于電動牽引、風力發電、通用工業等多個領域,擁有較好的市場前景。
簡化磁鏈法原理簡單易實現,是SRM無位置傳感器控制當中使用比較多的一種方法,其中估算磁鏈的準確性影響最后的位置估計結果,在忽略電流、電壓傳感器測量誤差的情況下,由磁鏈積分公式可知,繞組阻值是影響估算磁鏈大小的重要因素。據電阻的溫度特性,可通過測量電機繞組的溫度來間接測量當前繞組的阻值,但是這種方法需要在裝配電機的時候安裝溫度檢測裝置,使得系統結構更加復雜。另一種方法是通過數字信號處理的技術來計算繞組阻值。本文提出了一種利用PI算法在線自動修正繞組阻值的方法,以提高簡化磁鏈法中位置估計的精度。
1??簡化磁鏈法的基本原理介紹
通過檢測相繞組的電流、電壓信號得到估算磁鏈的值,與對應當前電流的換相位置處的參考磁鏈值相比較,如果前者大于后者,系統判定此時轉子已到達換相位置,關斷當前相,導通下一相;反之,就判定換相位置還沒有到達,保持當前相導通,其原理圖如圖2所示。
2??繞組阻值變化對位置估計的影響
在計算估算磁鏈的過程當中,利用電流、電壓傳感器能夠較準確地獲得繞組相電流和相電壓的值,而繞組阻值一般是程序當中預設的一個常數。由SRM的電磁特性可知,在理想情況下相繞組勵磁開始和相繞組退磁結束時,相電流的值和磁鏈的值均應為零,然而電機相繞組往往會受溫度變化、潮濕氧化等外界環境的影響,導致其阻值發生變化,出現預設電阻不等于實際電阻的情況,影響最終的位置估計結果。為便于討論,定義電阻誤差為:
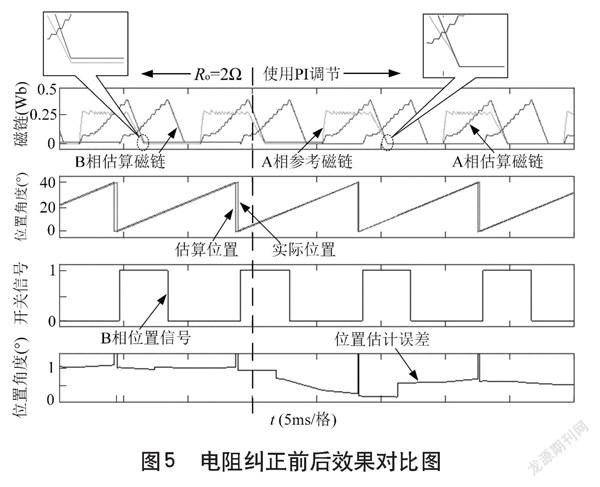
3??仿真驗證
本文以一臺三相12/8極的SRM為樣機,基于MATLAB/Simulink平臺搭建了控制系統的仿真模型,驗證前文所提出的電阻修正方法的有效性。
4??結語
在基于簡化磁鏈法的SRM無位置傳感器控制當中,往往會忽略繞組阻值變化對位置估計結果的影響,導致其位置估計結果超前或滯后于理想換相位置,通過對估算磁鏈的計算過程進行分析,提出了一種利用PI算法在線自動修正繞組阻值的方法,有效提高了簡化磁鏈法的位置估計精度。此外,作為簡化磁鏈法中比較對象之一的參考磁鏈,如何提高其準確性仍需進一步的研究。
參考文獻
[1]王宏華.開關磁阻電動機調速控制技術[M].北京:機械工業出版社,2014.
[2]張磊,劉闖,韓守義.基于一種新型磁鏈模型開關磁阻電機無位置傳感器技術[J].電機與控制學報,2018,22(7):27-34.
[3]李夢茹,冬雷,冉茂瑩,等.開關磁阻電機無位置傳感器控制方法綜述[J].微特電機,2021,49(1):51-54,64.
[4]匡斯建,張小平,劉蘋,等.基于相電感非飽和區定位的開關磁阻電機無位置傳感器控制方法[J].電工技術學報,2020,35(20):4296-4305.
[5]肖家鍇,鄭高峰,劉朋熙,等.高速電機發展現狀以及關鍵技術綜述[J].電氣傳動,2020,50(10):3-9,15.
[6]Berker Bilgin, James Weisheng Jiang, Ali Emadi.Switched Reluctance Motor Drives:Fundamentals to Applications[M].CRC Press:2019.
[7]Li S, Zhang S, Habetler T G, et al.Modeling, design optimization, and applications of switched reluctance machines—a review[J].IEEE Transactions on Industry Applications,2019,55(3):2660-2681.
[8]邱亦慧,詹瓊華,馬志源,等.基于簡化磁鏈法的開關磁阻電機間接位置檢測[J].中國電機工程學報,2001(10):60-63,121.[9]Wang C, Liu H, Liu X, et al.A sensor-less method for online thermal monitoring of switched reluctance machine[C]// 2015 18th International Conference on Electrical Machines and Systems (ICEMS).IEEE,2015:1709-1715.
[9]Hrbac R, Mlcak T, Kolar V, et al.Estimation of On-Fly Phase Resistance of on 8/6 Switched Reluctance Motor for Sensorless Control[J].Electronics & Electrical Engineering,2014,20(5):15-20.
[10]Cheok A D, Wang Z.DSP-Based Automated Error-Reducing Flux-Linkage-Measurement Method for Switched Reluctance Motors[J].IEEE Transactions on Instrumentation & Measurement,2007,56(6):2245-2253.
中圖分類號:TM352DOI:10.16660/j.cnki.1674-098x.2202-5640-4424基金項目:國家自然科學基金面上項目資助(項目編號:51777137)。
作者簡介:王浩楠(1994—),男,碩士在讀,研究方向為開關磁阻電機驅動系統及其控制。
蔡燕(1964—),女,博士,教授,研究方向為開關磁阻電機驅動、監測及多電平功率變換。
