基于識別雷達的寬帶跟蹤研究與實現
2022-07-22 08:24:06王曉燕蘇軍海
火控雷達技術 2022年2期
王曉燕 蘇軍海
(中國電子科技集團公司第二十研究所 西安 710068)
0 引言
隨著我國國防事業的不斷發展,科技水平的迅速提高,對雷達功能也在不斷提出新需求,而雷達在目標識別、戰場偵查、以及目標成像等方面的需求就是我們需要研究的新方向,這些方面都要求雷達具有很高的距離分辨率,因此我們對寬帶雷達的研究和工程化就顯得尤為重要。
雷達在進行目標識別、戰場偵查、以及目標成像時,其中的重點之一就是對目標距離,速度,方位及俯仰角度的穩定跟蹤。寬帶雷達由于其高的距離分辨率,不再是傳統窄帶跟蹤下的點目標跟蹤,而是對擴展目標進行跟蹤。傳統的寬帶雷達,基本是寬窄帶分時交替工作,檢測跟蹤用的是窄帶信號,成像識別用的寬帶信號,這會大大降低成像識別的有效性,而本文中用到的數據所依據的雷達則可以持續工作在寬帶狀態下,并穩定跟蹤目標,為快速有效的識別目標提供強有力的支撐。
1 寬帶跟蹤的實現和性能分析
本文研究的寬帶雷達,其發射的信號是寬帶線性調頻信號,經過脈沖壓縮,對于窄帶雷達,進行相參積累即可進行對目標跟蹤檢測的。但對于本文中的寬帶雷達,帶寬為200MHz,距離分辨率高達0.75m,對飛機等速度較高的目標極易產生嚴重的越距離單元走動,如果直接進行相參積累,就會產生目標的擴展,影響目標能量的有效積累,導致無法對目標的距離、速度和角度的有效跟蹤,從而影響了對目標的識別、偵查或成像效果。因此對于寬帶信號,在相參積累之前,要先對距離走動進行校正。通過DFT-IFFT 算法或CZT算法實現的Keystone變換可以實現對距離走動的校正。由于 CZT 算法直接通過 FFT 進行實現,因此計算量更小。要進行距離單元走動的校正,關鍵一步就是精確計算目標運動速度,對于跟蹤雷達,距離和速度的不模糊不可兼得,為了保證威力,只能選用低重頻,這就會產生速度模糊,因此還需進行接速度模糊,精確計算出目標運動速度,再通過CZT 算法實現對目標的距離單元走動進行有效校正。
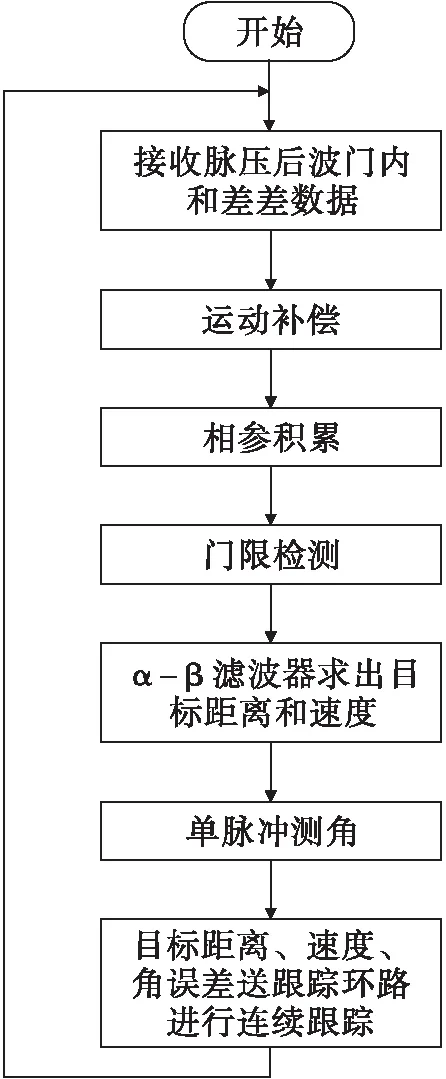
圖1 寬帶跟蹤流程圖
本文是基于FPGA加DSP的信號處理板卡來實現對目標的寬帶檢測跟蹤的,其中FPGA中進行脈沖壓縮處理,由于采用的寬帶信號帶寬為200MHz,雙倍帶寬采樣,數據量很大,因此FPGA中需要進行大點數的分段脈沖壓縮以合理利用硬件資源并滿足時間資源的要求;DSP中進行運動補償和CZT算法進行越距離單元走動的校正,相參積累,單脈沖測角,速度解模糊及距離速度的-濾波。
雷達采用寬帶 Chirp 相參脈沖串信號,其時域表達式為

(1)

雷達在跟蹤目標時,我們可以只簡單考慮目標想對雷達的徑向運動,且相對運動速度在一個積累周期內保持不變。根據雷達理論,目標回波信號可表示為

(2)
其中是距離擴展目標強散射點的個數;、分別是目標第個強散射點的幅度和初相;=2是多普勒頻率。的存在就會造成目標位置的偏移,影響距離跟蹤精度,同時雷達平臺的高速運動,也造成了脈間的距離走動,這將對相參積累造成嚴重影響,不利于目標檢測。因此在進行積累之前,需用CZT 算法對距離走動部分進行校正。

圖2 距離走動校正前
經過CZT算法對距離走動校正后,在經過IFFT即可得到目標的高分辨一維距離像,將各散射點融合或選大對目標進行跟蹤,經過距離和速度環的-濾波后得到目標的距離和速度。
目標角度可通過單脈沖測角的方法得到。幅度單脈沖雷達和、差波束的天線方向圖()、()可由圖3描述,跟蹤目標,就是要將和波束的中心指向最接近目標,此時可認為和波束增益約為常數,差波束增益近似為線性函數。設A為和波束天線增益,為差波束天線方向圖的斜率,點目標和單脈沖雷達天線波束中心(電軸)夾角為,目標回波信號為(),通過單脈沖天線接收,和信號為=()()=(),差信號為=()()=(),如圖4所示。

圖3 距離走動校正后
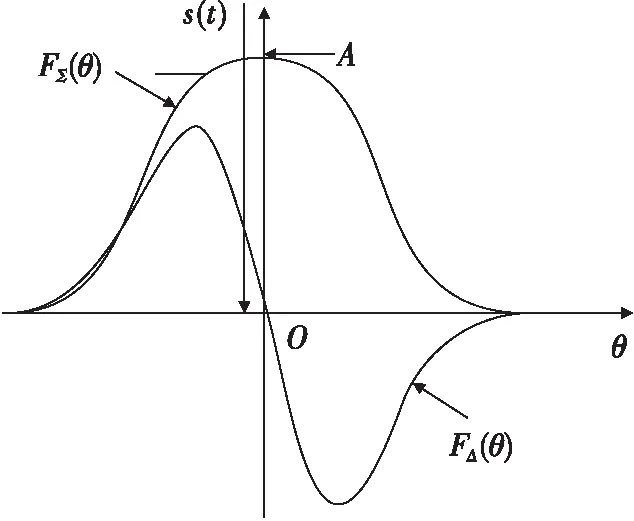
圖4 單脈沖測角示意圖
通過計算歸一化誤差信號為
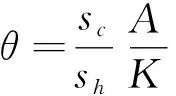
(3)
對式(3)取實部即可求出。目標的距離通常距離環跟蹤得到,通過計算即可得到目標偏離波束中心的距離,即線偏差。
得到目標的距離、速度和角偏差信息后,就實現了對目標的有效跟蹤。
2 實測數據跟蹤結果及分析
下面給出寬帶雷達對飛機的檢測跟蹤數據分析,其中檢測相關參數如下:帶寬200MHz,雙倍帶寬采樣,目標起跟距離30km,目標速度約226m/s,遠離雷達,16周積累。
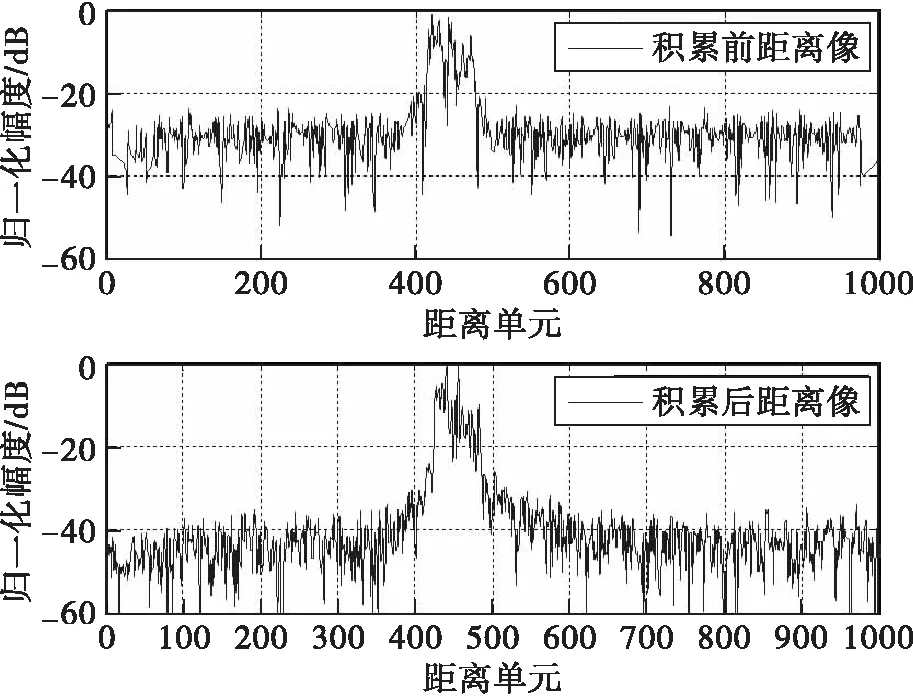
圖5 目標一維高分辨距離像
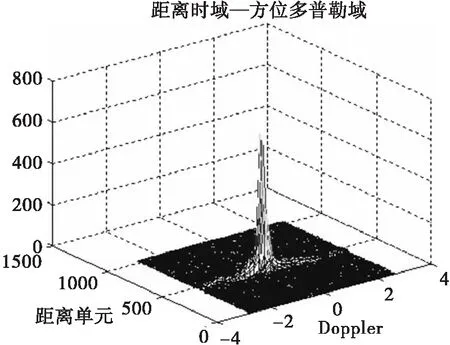
圖6 距離_多普勒像

圖7 目標飛行距離曲線
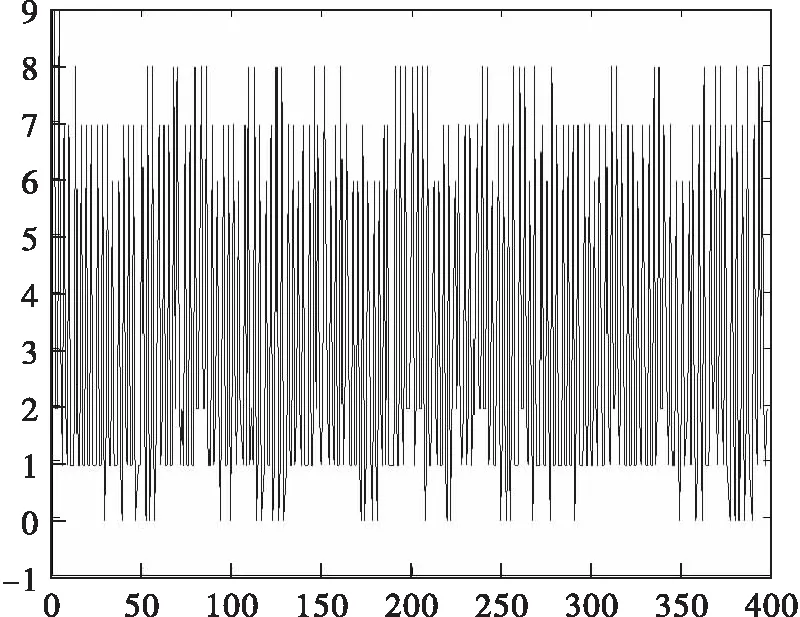
圖8 距離隨機誤差
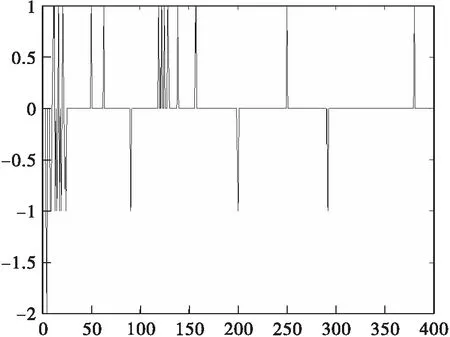
圖9 速度隨機誤差
經過400次隨機誤差計算,距離均方根誤差約為3.67m,速度均方根誤差約為0.18m/s。

圖10 方位角誤差

圖11 俯仰角誤差
實現寬帶穩定跟蹤后,經過對大量飛機數據的學習、建模,最終實現對建模飛機進行有效識別。
3 結束語
本文基于FPGA加DSP的硬件板卡來實現寬帶信號跟蹤,為目標識別、成像等的研究提供了連續的寬帶數據,通過對飛機的實測數據分析,距離、速度及角度的跟蹤精度均可達到對目標的穩定跟蹤,為目標識別、成像等提供了較好的研究平臺。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25