基于多種技術的無人駕駛壓實系統研究及應用分析
2022-07-27 06:21:08張揚費燕華
重慶建筑 2022年7期
張揚,費燕華
(1 黑龍江省交投公路建設投資有限公司,黑龍江哈爾濱 150000;2 黑龍江省公投中路交通科技有限公司,黑龍江哈爾濱 150000)
0 引言
近年來我國經濟快速增長,公路行業迅速發展,國家在公路基礎建設方面的投入也逐年加大,結合當前技術發展水平,公路施工的各個階段逐漸向信息化、智能化[1]發展。綜合通訊[2-3]、定位[4-5]、自動控制[6-8]等多種技術,可采集施工過程中的數據,并運用大數據分析和決策系統對數據進行處理,從而控制和評價施工質量。
目前公路壓實施工存在過壓和欠壓的現象,壓實質量難以控制。在路基壓實方面,國內外學者通過建立路基壓實質量模型[9]及壓實反饋方法[10]對路基壓實效果進行控制、分析,并通過分析智能壓實技術的經濟效益[11],得出智能壓實能夠降低道路施工及后期維護成本。在路面壓實方面,專家通過建立瀝青路面質量評價模型[12],設計智能壓實施工質量控制系統[13],進行路面壓實質量的控制。但路面施工的智能壓實施工控制技術還不夠完善,壓實值也不能得到實時反饋及控制。
因此,本研究將5G 通訊技術、高精度定位技術、自動控制技術等綜合運用在無人駕駛壓路機上,在黑龍江哈肇高速公路的施工中進行試驗段施工,分析無人駕駛智能壓實施工過程中的壓實質量,以期為公路工程智能施工的發展提供技術支持。
1 無人駕駛自動控制理論
無人駕駛自動控制系統是無人駕駛智能壓實系統的關鍵部分,自動控制技術通過智能控制算法對壓路機的各項工序進行硬件、軟件設計,從而控制壓路機施工。
1.1 無人駕駛自動控制算法
壓實控制算法需要對控制系統進行反饋,作為輸入條件導入至無人駕駛壓路機的控制終端系統,因此輸入的參數作為機械控制的指令來輸入控制系統。
根據相關研究[14]提出瀝青路面壓實的控制理論及方法,如式(1)所示:
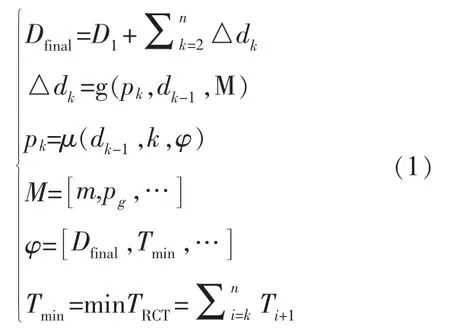
式中:Dfinal為目標壓實質量;D1為第1 遍碾壓后的壓實質量,即初始壓實質量;△dk為第k 遍碾壓后的壓實質量增量;△dk-1為第k-1 遍碾壓后的壓實質量;pk為智能決策單元輸出的第k 遍壓實數(fk,vk,ak),其中,fk為第k遍壓路機的振動頻率,vk為第k 遍壓路機的壓實速度,ak為第k遍壓路機的振幅;M 為包括諸如壓路機質量m、瀝青混合料級配pg等在內的施工機械與瀝青混合料固有特性的物理量;φ 為包括諸如目標壓實質量Dfinal、最小化剩余壓實時間Tmin等的物理量極限或目標指標;TRCT為剩余壓實時間;Ti+1為第i+1 遍壓實層每單位長度的壓實所需時間。
該控制算法具體應用流程如下:針對輸出物理量D,檢測單元對路面壓實施工區域的壓實參數和壓實質量等數據進行自動采集,首先利用異常判別單元對該輸出物理量進行判別,若異常判別指示器超過一定量,則當前壓實材料屬于異常填筑材料,將異常信息實時反饋給現場施工及監理人員進行處理;若異常判別指示器正常則將該物理量作為智能決策單元輸入,智能決策單元根據實時數據信息優化壓實施工工藝提出壓實方案,控制單元根據壓實方案,基于控制方法設計的控制器對執行機構進行有效控制并完成壓實施工;下一壓實遍數,控制單元依據最優壓實方案控制壓路機執行壓實動作。整個壓實過程屬于閉環循環滾動優化壓實,直至路面壓實質量符合設計要求。
1.2 無人駕駛自動控制系統架構
無人駕駛壓路機自動控制系統以計算機為中心,通過控制算法進行軟件及硬件設計,從而實現環境感知、路徑規劃、自動控制的智能系統。無人駕駛壓路機自動控制系統包含感知層、規劃層、控制層,具體架構如圖1 所示。
壓路機采用“IF-THEN”決策系統,依據具體規則編程及自動控制算法設計。感知層通過定位接收機、角位移傳感器、超聲波雷達感知施工環境和壓路機自身狀態,通過檢測反饋元件將檢測數據(壓實速度、轉向角度等)反饋到自動駕駛控制器和管理平臺。規劃層采用工控機、自研發管理平臺或第三方研發平臺以滿足計算機各類控制單元需求,根據反饋數據,結合施工區域信息、施工進度、碾壓施工工藝信息自動規劃進場軌跡、碾壓軌跡和糾偏措施、避障措施,實時輸出控制信息作為自動壓實控制系統的輸入量。控制層的自動駕駛控制器應用自適應控制算法輸出控制信號,通過電控硬件接收機載控制器信號,自動控制壓路機行走、轉向、振動、避障,從而使壓路機能完成限定區域及條件下的無人駕駛。
2 無人駕駛智能壓實系統研究
2.1 無人駕駛智能壓實系統架構
經過對多種技術的調研分析,無人駕駛壓路機工作系統由北斗導航系統、無人駕駛自動控制系統、車載傳感器、車載雷達、無人駕駛智能壓實管理平臺組成,通過5G 移動網絡進行信息傳輸,具體架構如圖2 所示。
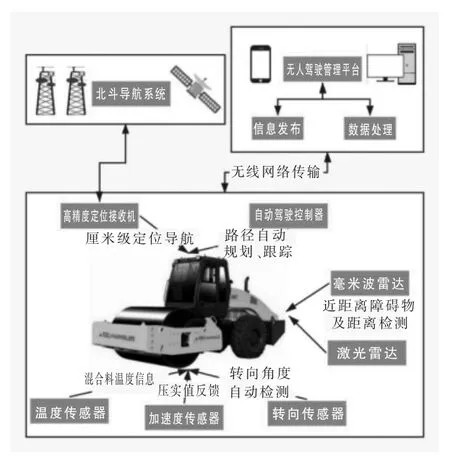
圖2 無人駕駛壓路機架構圖
北斗導航系統向高精度定位接收機傳輸反饋定位信息,無人駕駛自動控制系統實時共享定位信息,精準控制壓實軌跡。無人駕駛壓路機通過溫度傳感器采集壓實溫度,轉向傳感器采集轉向角度數據,加速度傳感器采集實時壓實值,采集的各項數據均通過5G 無線網絡進行傳輸,通過自身系統的算法或管理平臺的大數據和決策系統,對數據進行存儲、接入、交換、處理、決策分析與組織管理。
2.2 無人駕駛智能壓實系統工作流程
根據無人駕駛壓路機架構,壓路機實際施工時與管理平臺的信息交互控制流程設計如圖3 所示。
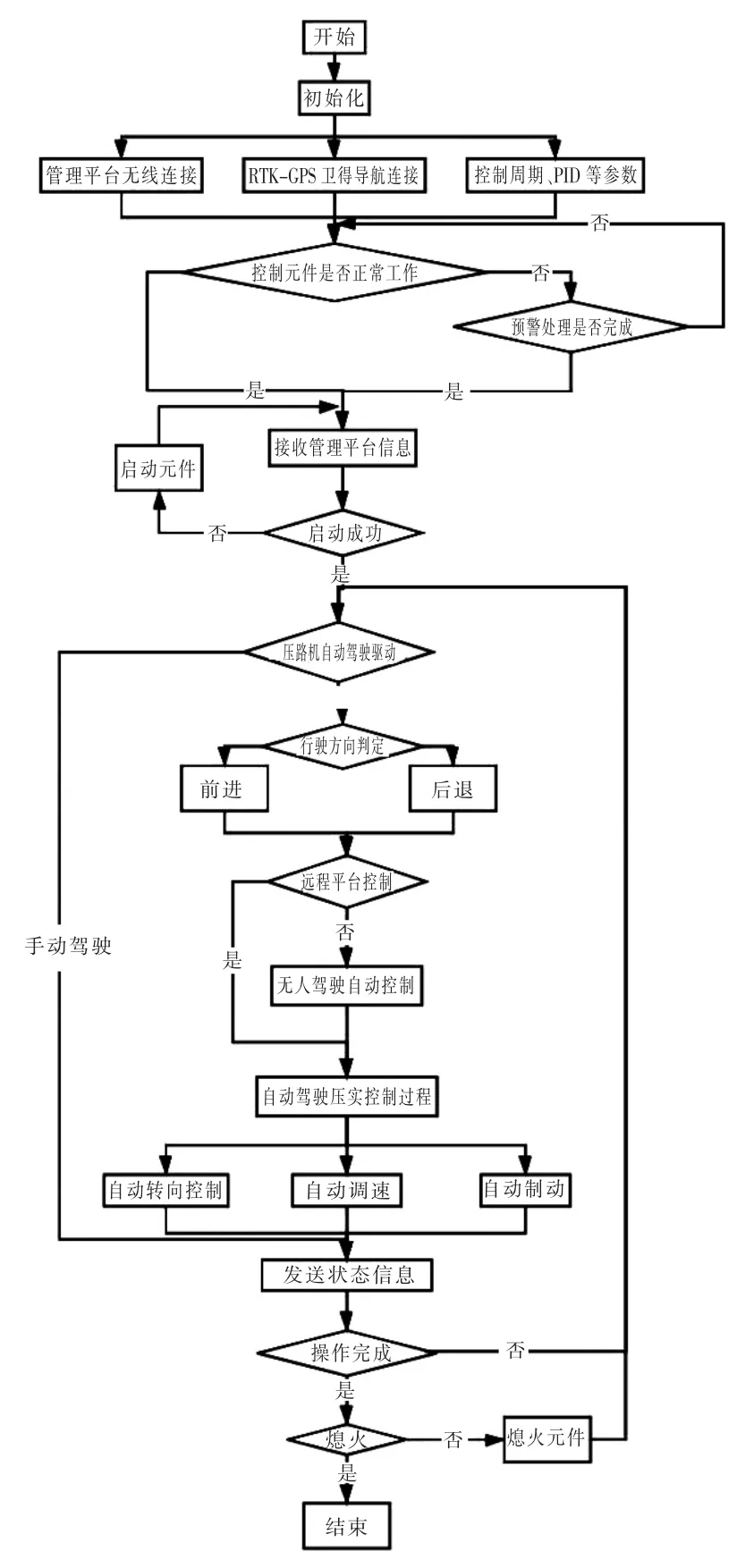
圖3 無人駕駛智能壓實系統工作流程圖
在無人駕駛壓路機開始工作后,無人駕駛智能壓實系統通過壓路機自動駕駛控制器內置的無人駕駛控制程序(Unmanned Control Program,UCP)首先執行一個初始化過程,然后UCP 通過5G 移動網絡與管理平臺建立RTK-GPS 連接,初始化導航及自動控制周期、PID 參數和其他相關狀態參數。然后,UCP 開始檢測整個自動控制系統中各個傳感器和執行器的工作狀態。如果有部件無法正常工作,則UCP 記錄其狀態參數,并將相關預警信息發送至管理平臺及業主客戶端,等待處理;否則UCP 將不會進行自動控制操作。如果UCP 通過系統自檢,則自動駕駛壓實智能控制系統開始運行,根據衛星導航及自動控制周期分為一系列自動駕駛壓實控制流程。
UCP 在整個自動駕駛壓實工作中接收和發送控制信息,實時接收管理平臺發出的命令并輸入目標量,實時接收RTK-GPS 定位數據、傳感器數據、雷達數據。UCP 首先執行管理平臺控制指令,為壓路機供電,實現啟動或關閉;然后UCP 調用轉向控制傳感器,比較壓實軌跡目標輸入量與定位數據的偏差,確定期望的轉向角度;UCP 通過比較方向盤的期望轉向角與實際轉向角的差異,根據PID 算法的輸出電流自動控制方向盤,從而使壓路機沿預定方向旋轉。此外,UCP 還調用溫度、速度傳感器,比較預期的壓實溫度和壓實速度、雷達感應、自動制動工況等,并根據其他壓路機的行駛狀態,通過PID 算法的輸出電流控制油門執行器,從而控制壓路機達到預期的行駛速度。
在自動駕駛壓實控制流程中,每道工序分別有三個子工序:自動轉向控制、自動調速、自動制動。按照程序完成這三個工序的數據反饋及數據傳輸后,系統判定壓實工作是否完成,從而控制壓路機熄火,或重新開始自動駕駛壓實流程。
3 無人駕駛壓路機施工效果分析
黑龍江省高速公路哈肇段的建設為本研究的主要測試路段,試驗段全長500m,上基層材料為ATB-25 粗粒式瀝青碎石。根據施工數據對無人駕駛的施工效果進行如下分析。
3.1 無人駕駛結構層壓實質量分析
3.1.1 下面層高程分析
壓實施工完成后,在無人駕駛壓實試驗段上,將測量得到的下面層實測高程和下面層設計高程數據繪制成等高線圖,如圖4所示。
由圖4 可以看出,無人駕駛壓實試驗段下面層的等高線雖然比設計高程等高線圖略有彎曲,但各等高線區域劃分的位置基本一致。由下面層實測高程和下面層設計高程數據得到,在路面位置2m、7m、12m處設計高程和實際高程差值的平均值分別為0.011 m、0.0013m、0.014m,標準差分別為0.0120、0.0082、0.0093,說 明除路面位置為7m 的中間區域,2m 和12m處兩車道的縱斷高程均值均高于設計要求,且標準差也高于中間區域,數據波動較大。
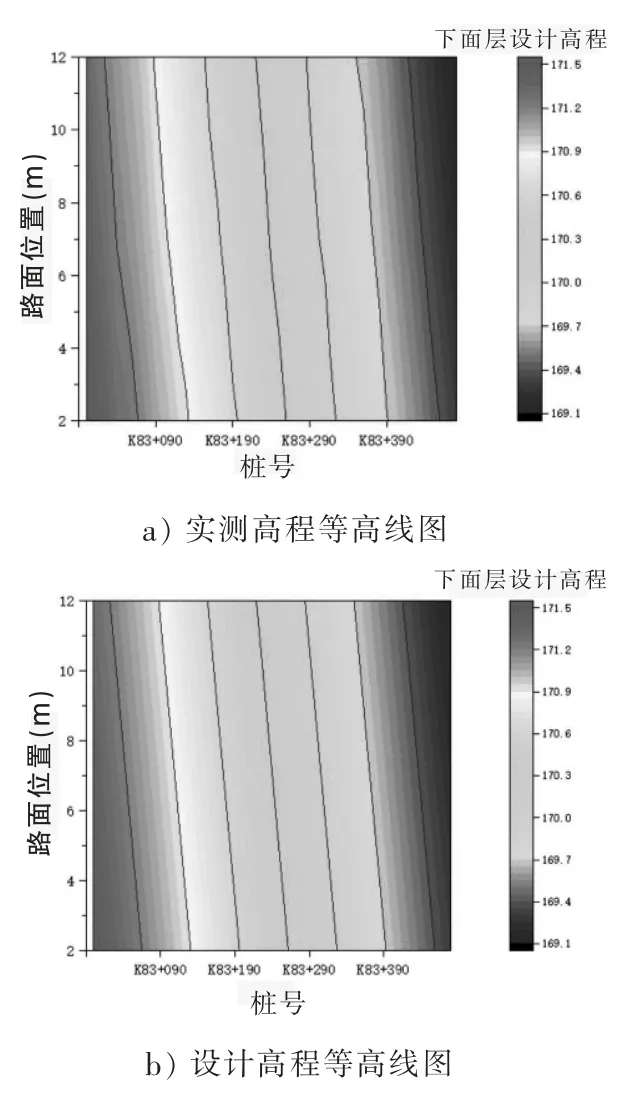
圖4 試驗段下面層高程等高線圖
將下面層實測高程和下面層設計高程數據繪制成高程差值圖,如圖5 所示。
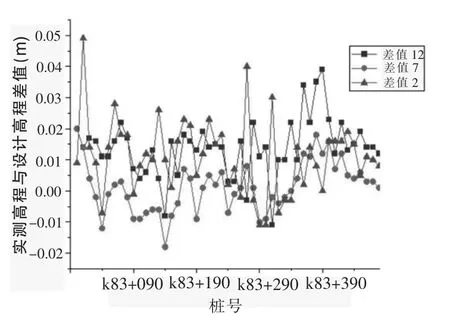
圖5 試驗段下面層實測高程和設計高程差值
由圖5 可以看出,2m、7m、12m 處合格數據的比例分別為44.9%、79.6%、24.5%,因此7m 處高程最符合要求,2m 和12m 處數據整體偏高。
3.1.2 下面層厚度分析
壓實施工完成后,在無人駕駛壓實試驗段上,將測量得到的下面層實測高程和上基層實測高程數據繪制成下面層厚度各類別分布圖(圖6)。
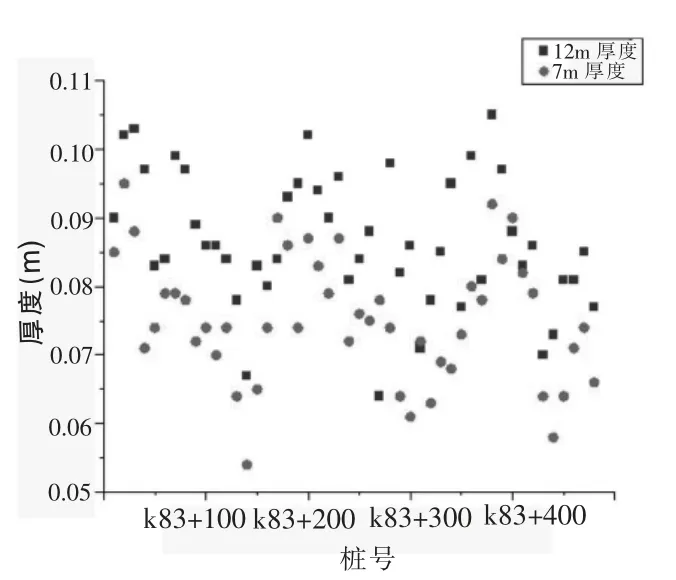
圖6 下面層厚度各類別分布圖
由圖6 可知,在路面位置7m、12m 處下面層厚度的平均值分別為0.075m、0.087m,標準差分別為0.0093、0.0097,變異系數分別為12.3%、11.2%,路面位置7m、12m 處與下面層設計厚度相比最大差異變化分別為32.5%、31.25%。與下面層設計厚度0.08m相比,7m 處厚度達到設計要求數據僅為29.1%,12m 處達到設計要求數據僅為39.6%。
3.1.3 下面層總體分析
結合圖4、圖5、圖6 進行分析得到,下面層無人壓實施工中兩車道中間7m 左右區域厚度不均勻且厚度均值低于設計值,但整體高程接近設計高程,原因可能是上基層中間區域縱段高程可能接近設計要求上限,攤鋪機攤鋪時根據設定值進行施工,從而導致道路中間區域厚度較小。
道路位置12m 處厚度大,下面層設計高程與實測高程差值均值也最大,但作為道路外側區域出現這種情況,說明壓實程度不夠。而道路位置2m 處下面層設計高程與實測高程標準差最大,數據波動很大,路面不平整,可能是因為無人駕駛壓路機雖然能對道路邊緣區域進行貼邊壓實,但還是不能夠完全精準地控制。
3.2 無人駕駛壓實質量分析
無人駕駛壓實試驗段施工完成后,為檢驗無人駕駛壓實施工的實際壓實質量,試驗檢測人員在樁號K83+000~K83+500 的無人駕駛壓實試驗段和樁號K83+500~K84+000 的人工駕駛壓實路段,隨機取樣進行壓實度試驗,在兩個路段距離中央分隔帶2m 左右處分別進行滲水系數的試驗檢測,壓實度及滲水試驗檢測數據如表1 所示。
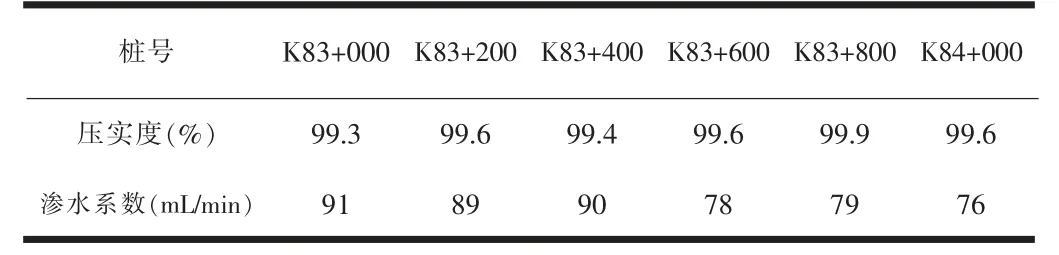
表1 試驗檢測數據表
由表1 可知,相關的檢測數據結果滿足技術規范要求,同時無人駕駛試驗段壓實度、滲水檢測結果的標準差達到0.2、6.3,數據的變異性較小,數據整體的均勻性相比人工駕駛施工段落,離散程度明顯較小,表明無人駕駛壓實技術整體質量的均勻性提升是明顯的。
4 結論
通過無人駕駛智能壓實控制算法的研究,提出智能壓實自動控制系統的工作流程,同時對無人駕駛壓路機工程實例的施工效果進行分析,得到了以下結論:
(1)無人駕駛智能壓實系統將無人駕駛管理平臺、定位裝置、車載傳感器、車載雷達、自動駕駛控制系統之間的信息、數據,通過5G 移動網絡傳輸、處理,讓壓路機完成路徑規劃、安全制動、壓實反饋等命令,控制壓路機完成預設的壓實作業,最大限度地利用了信息資源,實時準確調度,迅速解決工程施工中的問題,實現了智能施工;
(2)此系統能夠精準控制壓實軌跡,提升了壓實均勻性,避免了人工駕駛漏壓、欠壓的問題,與傳統的人工駕駛壓實相比,做到了安全、智能、高效的路面施工,顯著提高了施工質量,節約時間及成本。
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國房地產業(2016年2期)2016-03-01 01:25:48
汽車觀察(2016年3期)2016-02-28 13:16:26
