基于連桿機構(gòu)的手指外骨骼設(shè)計
2022-07-28 06:57:20廖斌黃運鉿鄒翔李國翚
科學(xué)技術(shù)與工程 2022年17期
廖斌, 黃運鉿, 鄒翔, 李國翚
(1.天津大學(xué)機械工程學(xué)院, 天津 300350; 2.桂林電子科技大學(xué)機電工程學(xué)院, 桂林 541004; 3.天津開發(fā)區(qū)奧金高新技術(shù)有限公司, 天津 300072)
手功能損傷以及上肢部分功能損傷在腦卒中和腦外傷幸存者中較為常見。目前傳統(tǒng)的康復(fù)治療主要依靠醫(yī)療康復(fù)師進行,治療效果受到康復(fù)師經(jīng)驗、精力等的因素影響,治療效率較低。為了提高康復(fù)治療的效率,彌補康復(fù)師人員不足的缺陷,降低康復(fù)師的工作強度,相應(yīng)的康復(fù)治療裝備也應(yīng)運而生。外骨骼屬于可穿戴型裝備,可用于肢體的康復(fù)治療。利用外骨骼進行康復(fù)訓(xùn)練已逐漸成為康復(fù)訓(xùn)練的主流[1-2]。外骨骼機器人的研究正朝著輕量化、智能化的方向發(fā)展。手部外骨骼通過固定在患者手上帶動手指做屈伸運動等康復(fù)訓(xùn)練。在康復(fù)訓(xùn)練過程中,外骨骼的輕便性、舒適性和安全性顯得尤為重要[3]。手指外骨骼是手部外骨骼的基礎(chǔ)組成模塊,也是實現(xiàn)功能的主要模塊,所以手指外骨骼設(shè)計的優(yōu)劣直接影響著手部外骨骼功能的實現(xiàn)。
外骨骼的特點是用夾板或仿生結(jié)構(gòu)包裹住肢體,各關(guān)節(jié)需要驅(qū)動力矩帶動肢體運動[4-5]。手部外骨骼的通常主要通過連桿機構(gòu)驅(qū)動或者線纜驅(qū)動實現(xiàn)。連桿機構(gòu)常用于表面接觸連接,其優(yōu)點是制造相對簡單,容易獲得較高的制造精度,同時連桿曲線豐富,可滿足不同運動的需求。目前出現(xiàn)的連桿機構(gòu)的形式有串聯(lián)機構(gòu)[6-7]。平行四邊形機構(gòu)[8]、多連桿復(fù)雜機構(gòu)[9]等。多數(shù)連桿機構(gòu)中的連桿長度固定,這樣對于不同的佩戴者容易造成手指關(guān)節(jié)與外骨骼脫位的現(xiàn)象[10]。線纜驅(qū)動模擬人體手部肌腱的驅(qū)動方式,通常線纜驅(qū)動外骨骼結(jié)構(gòu)較連桿機構(gòu)外骨骼簡單,有助于減輕手部的負重。除了直接驅(qū)動手指外骨骼的關(guān)節(jié)[11],線纜可與齒輪機構(gòu)組合完成手指關(guān)節(jié)的屈伸[12-13],也能夠驅(qū)動無關(guān)節(jié)手指外骨骼[14],以及剛?cè)狁詈蠙C構(gòu)的手部外骨骼[15]。但是線纜存在明顯的彈性變形,控制方法較為復(fù)雜,在實際運動過程中需要補償由彈性變形引起的關(guān)節(jié)旋轉(zhuǎn)偏差。
手部外骨骼通常都是由手指外骨骼組成。現(xiàn)首先設(shè)計好手指外骨骼,為今后設(shè)計手部外骨骼奠定基礎(chǔ)。連桿機構(gòu)驅(qū)動方式直接,便于控制,選擇以連桿驅(qū)動方式來設(shè)計手指外骨骼。設(shè)計過程中除了需要解決好手指外骨骼的運動自由度問題之外,手指外骨骼的廣泛適用性和舒適性也是需要著重考慮的問題。
1 手指外骨骼運動分析與結(jié)構(gòu)設(shè)計
1.1 人體手指的結(jié)構(gòu)及彎曲的運動規(guī)律分析
人體的手部結(jié)構(gòu)由許多肌肉、關(guān)節(jié)組合而成,具有很復(fù)雜的機械結(jié)構(gòu),當進行抓握動作時,手部會結(jié)合大腦的感知來完成,除此之外,手還能用來表達情感。可見手部的功能異常會帶來極大的不便,當給手指功能有障礙的患者設(shè)計康復(fù)外骨骼來輔助治療時,提高外骨骼與手指運動軌跡的契合度,以及對手指進行彎曲及伸直運動時的規(guī)律進行分析是很有必要的一步。
1.1.1 人體手部結(jié)構(gòu)機理分析

圖1 手部骨骼示意圖Fig.1 Hand bones
圖1為手部骨骼示意圖,當手指進行彎曲和伸直時,遠端指間關(guān)節(jié)(distal interphalangeal point,DIP)和近端指間關(guān)節(jié)(proximal interphalangeal point,PIP)關(guān)節(jié)均只有1個自由度。掌指關(guān)節(jié)(metacarpophalangeal point,MP)比指間關(guān)節(jié)多1個自由度。可知,人體的手掌部分由19塊骨骼以及14個活動關(guān)節(jié)組成,各自有著獨立的排布,共同協(xié)作完成著復(fù)雜的動作。基于本設(shè)計的目的,著重分析單個手指3個關(guān)節(jié)DIP、PIP和MP的運動方式。
1.1.2 手指極限彎曲角度分析
人體解剖學(xué)指出,手指指節(jié)骨塊之間的聯(lián)系由韌帶完成,韌帶除了可以連接骨骼,還能對手指的靜態(tài)極限位置進行限制,約束手指指節(jié)骨骼間的關(guān)節(jié)轉(zhuǎn)動角度。而肌腱的功能是將肌肉產(chǎn)生的力傳導(dǎo)到骨骼使之進行運動,形成對骨骼的動態(tài)限制。在韌帶與肌腱的協(xié)作下,關(guān)節(jié)得到了完善的限制,由圖2可知,MP與DIP關(guān)節(jié)極限屈曲角度約為90°,PIP關(guān)節(jié)的極限屈曲角度約為100°。
由于外骨骼屬于穿戴設(shè)備,所以需考慮外骨骼與手指的相對固定方式。考慮選用魔術(shù)貼的形式使外骨骼與手指進行固定,既方便拆裝,且材質(zhì)柔軟,對人體皮膚不會產(chǎn)生傷害,使得用戶使用感受良好。如圖3所示,當手指彎曲時,由于魔術(shù)貼在手指彎曲前已經(jīng)緊貼手指,彎曲后肌肉的收縮導(dǎo)致該指節(jié)的橫截面積增大,對手部產(chǎn)生壓迫,所以佩戴前后手指的各個指節(jié)的極限彎曲角度并不相同。通過收集佩帶魔術(shù)貼后手指的極限彎曲角度數(shù)據(jù),可知MP的極限角度約為45°,PIP約為90°,DIP約為45°。
1.1.3 手指自由度分析及確定
為了方便設(shè)計以及便于進行運動分析,對手指的結(jié)構(gòu)進行適當?shù)暮喕3四粗钢猓溆?根手指均是由3個指節(jié)骨骼組成,其中又包含了兩個指間關(guān)節(jié)DIP與PIP和一個掌指關(guān)節(jié)MP,掌指關(guān)節(jié)負責將手指與掌骨相連接。兩個指間關(guān)節(jié)均是只有1個自由度,經(jīng)過簡化可用1個鉸鏈結(jié)構(gòu)來代替。而掌指關(guān)節(jié)不但可以實現(xiàn)伸直與屈曲,還能實現(xiàn)外展和內(nèi)收,具有兩個自由度。但是外展和內(nèi)收的動作對于手指的彎曲來說并不是日常動作中作為主要的運動,并且手指做外展和內(nèi)收動作時,關(guān)節(jié)的擺動幅度僅在±10°之內(nèi)。手指康復(fù)訓(xùn)練時忽略掌指外展和內(nèi)收運動,只考慮主要的伸曲運動,進而化簡為單自由度關(guān)節(jié)。最后將指節(jié)骨骼簡化為連桿機構(gòu),連桿的長度為手指實際的指節(jié)長度,掌指骨骼作為機架。如圖4所示,該手指簡化結(jié)構(gòu)具有3個自由度。
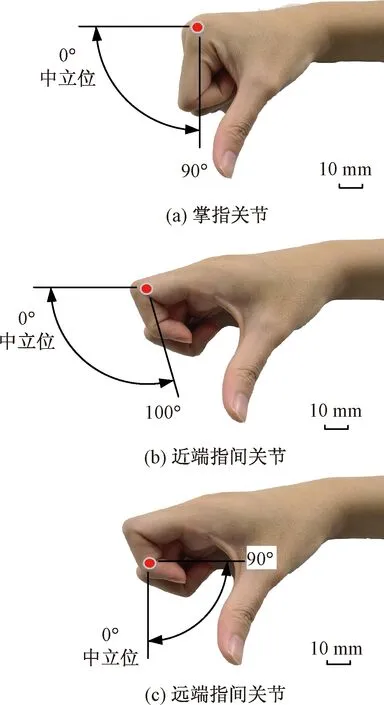
圖2 手指3個關(guān)節(jié)極限屈曲運動示意圖Fig.2 The extreme bending motions of three finger joints

圖3 手指佩戴魔術(shù)貼彎曲情景圖Fig.3 Finger bending with a velcro
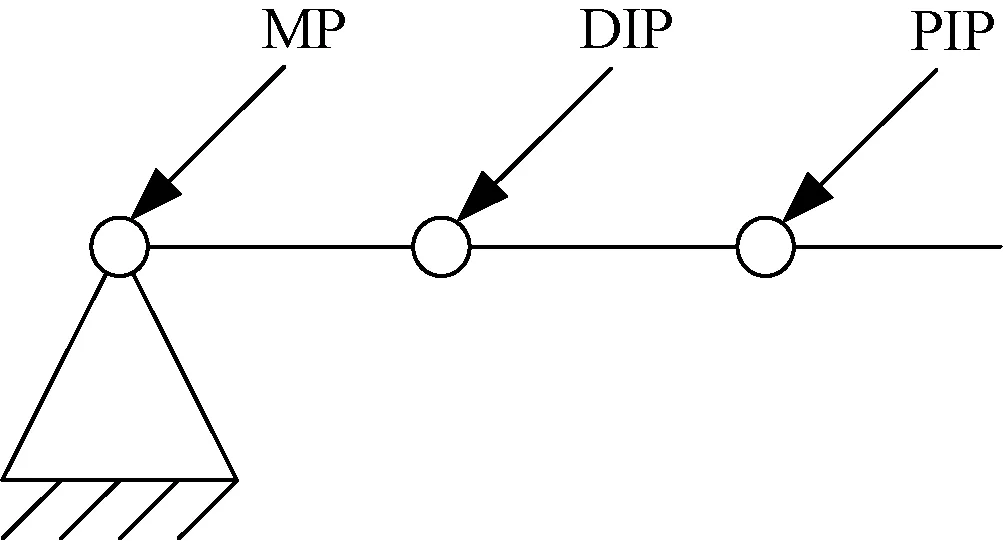
圖4 手指簡化結(jié)構(gòu)Fig.4 The simplified structure of a finger
1.2 手指外骨骼運動分析
該手指外骨骼僅針對手指的彎曲與伸直這兩個動作,不考慮掌指端MP的外展與內(nèi)收時的運動狀態(tài)。對近掌指節(jié)來說,其進行彎曲動作是圍繞MP關(guān)節(jié)做旋轉(zhuǎn)運動,類似一個鉸鏈結(jié)構(gòu),而該指節(jié)可以看作一根搖桿。將從四桿機構(gòu)出發(fā)對外骨骼進行設(shè)計,若機構(gòu)中存在搖桿,根據(jù)機架的選擇與桿長的變化可組成的兩種結(jié)構(gòu):曲柄搖桿機構(gòu)、雙搖桿機構(gòu)。由于每個手指關(guān)節(jié)可彎曲的角度均是存在限制的,需要對搖桿的擺動角度控制較為精準才能滿足設(shè)計需要。
由于曲柄搖桿機構(gòu)需要原動件一直循環(huán)整轉(zhuǎn)才能使搖桿不斷重復(fù)來回擺動,此時搖桿結(jié)構(gòu)的角度控制難度較大。而雙搖桿機構(gòu)中作為原動件輸出件的搖桿的運動狀態(tài)和被動搖桿的運動狀態(tài)是一一對應(yīng)的,對原動件的旋轉(zhuǎn)角度進行控制則很容易對另一搖桿進行精準控制。于是考慮通過使用雙搖桿機構(gòu)去實現(xiàn)手指外骨骼彎曲功能,設(shè)計簡圖如圖5所示。若僅考慮外骨骼能自行彎曲,此時該外骨骼也具有3個自由度。

1、2、3為主動搖桿;4、5、6為被動搖桿;7、8、9為帶鉸鏈的滑塊圖5 3個自由度機構(gòu)簡圖Fig.5 The diagram of a 3-DoF mechanism
桿件1、2、3安裝在驅(qū)動件上,當最左側(cè)外骨骼機架上的原動件順時針轉(zhuǎn)動,1桿件均隨著驅(qū)動件的轉(zhuǎn)動而擺動,同時1桿在7滑塊上產(chǎn)生滑動,因此4桿件受到向下的壓力從而實現(xiàn)彎曲。而4桿件又作為下一外骨骼關(guān)節(jié)的機架,重復(fù)最左側(cè)外骨骼關(guān)節(jié)的動作,2桿受原動件驅(qū)動后擺動,5桿也因受到壓力而進行彎曲運動。最后一個關(guān)節(jié)與前兩個關(guān)節(jié)同理完成運動。根據(jù)上述運動機制,只有每個外骨骼關(guān)節(jié)的運動又相對獨立,均由各自關(guān)節(jié)上的原動件決定運動狀態(tài),不受各自影響,但各個關(guān)節(jié)又能有機地聯(lián)結(jié)起來。
通過結(jié)構(gòu)簡圖可知,除了機架之外,共有n=9個運動構(gòu)件,其中又包含了9個轉(zhuǎn)動副和3個移動副均屬于低副。自由度計算公式為
F=3n-2PL-PH
(1)
式(1)中:F為自由度;PL為低副;PH為高副;最終計算得到F=3,與所分析的結(jié)果相同。
1.3 手指外骨骼結(jié)構(gòu)設(shè)計方案
眾所周知,每個人的手指尺寸會有很大差異,并且同一手掌上的五指也是形態(tài)各異,對所設(shè)計的手指外骨骼既然想滿足各類人群的使用就需要考慮到外骨骼各節(jié)的長度可調(diào)的問題。并且同一根手指在伸直與彎曲狀態(tài)下肌肉的拉伸與壓縮狀態(tài)也會導(dǎo)致測量尺寸的改變。如圖6所示,當手指伸直時外側(cè)和內(nèi)側(cè)的長度是大致相等的。如圖7所示,當手指彎曲時,外側(cè)與內(nèi)側(cè)的長度差距明顯,外側(cè)肌肉被拉伸,內(nèi)側(cè)肌肉被壓縮。同理可知,當戴上手指康復(fù)外骨骼時,手指伸直與彎曲時所需外骨骼的總體長度也會略微發(fā)生變化。此時如果外骨骼的整體長度固定會給手指帶來不舒適感。

圖6 手指伸直示意圖Fig.6 A straight finger

圖7 手指彎曲示意圖Fig.7 A bent finger
所設(shè)計的機構(gòu)需增加可變化外骨骼指節(jié)長度的結(jié)構(gòu)才能夠滿足設(shè)計要求。圖8所示為優(yōu)化后的機構(gòu)簡圖。該外骨骼機器人具有3對可以在外骨骼關(guān)節(jié)內(nèi)滑動的鉸鏈,同一個外骨骼關(guān)節(jié)內(nèi)有兩個滑孔,分別位于上下兩側(cè),可以避免相鄰關(guān)節(jié)間的鉸鏈發(fā)生干涉運動影響外骨骼的正常工作。伴隨著外骨骼各個關(guān)節(jié)間的間距變化,可滑動鉸鏈根據(jù)實際情況在外骨骼的滑孔內(nèi)自由伸縮。當桿1受原動件驅(qū)動后向順時針方向擺動,帶鉸鏈的滑塊4受到向下的分力,使手指與外骨骼結(jié)合構(gòu)件13向下彎曲,此時外骨骼間的鉸鏈關(guān)節(jié)因手指彎曲時的變化特點而進行滑動,使得外骨骼間的距離變大,從而實現(xiàn)了近掌指節(jié)的彎曲運動。當彎曲運動完畢后,原動件開始逆時針帶動桿1,將構(gòu)件13向上提起,實現(xiàn)返回手指伸直功能。

1、2、3為主動擺動滑桿;4、5、6為鉸鏈滑塊;7、8、10、12為連桿;9、11為被動擺動滑桿;13、14、15為3個單節(jié)手指外骨骼與手指固定的結(jié)構(gòu)圖8 具有3個自由度的手指外骨骼機構(gòu)簡圖Fig.8 The diagram of a 3-DoF finger exoskeleton mechanism
由圖8可知,一共有15個活動構(gòu)件,其中將手指結(jié)構(gòu)中的鉸鏈一并算上即轉(zhuǎn)動副有12個,移動副共有9個,根據(jù)自由度計算公式[式(1)]計算得到自由度為3,又結(jié)合該機構(gòu)簡圖的運動分析可知該方案合理。
2 手指外骨骼機械結(jié)構(gòu)設(shè)計
2.1 舵機輸出傳動方式原理與分析
由于主動桿不需要整周旋轉(zhuǎn),并考慮到盡量簡化傳動結(jié)構(gòu),減輕手指負載,故考慮采用舵機進行驅(qū)動。當舵機順時針轉(zhuǎn)動一定角度后,擺桿受到舵機的驅(qū)動力順時針下擺,從而將力傳導(dǎo)到外骨骼指節(jié)使其進行彎曲。根據(jù)此思路設(shè)計如圖9所示的結(jié)構(gòu)。其中掌背舵機固定架與掌背固定架為兩個零件裝配為一體,不可相對運動。裝配體通過魔術(shù)貼布帶固定在手背,作為不可移動的機架。舵機安裝在掌背舵機固定架上,使用螺釘在側(cè)面固定。舵機轉(zhuǎn)子與外骨骼擺桿固定,當舵機順/逆時針轉(zhuǎn)動相應(yīng)角度時,外骨骼擺桿也會跟隨舵機轉(zhuǎn)子一起轉(zhuǎn)動。外骨骼指節(jié)側(cè)面設(shè)計有圓柱狀小懸臂,與外骨骼擺桿的槽口內(nèi)切,當外骨骼擺桿順/逆時針轉(zhuǎn)動,該圓柱狀小懸臂將會受到與切面垂直的壓力,帶動外骨骼指節(jié)向下彎曲。手指固定環(huán)與魔術(shù)貼組合固定指節(jié),鉸鏈用于連接零件。
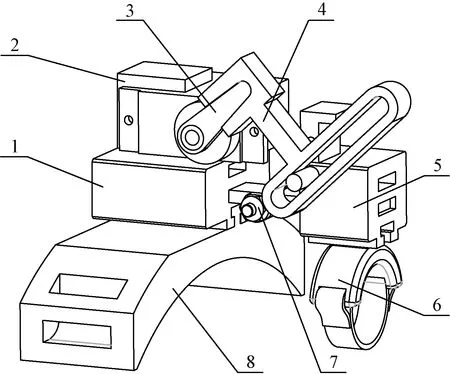
1為掌背舵機固定架;2為舵機;3為舵機轉(zhuǎn)子;4為外骨骼擺桿;5為外骨骼指節(jié);6為手指固定環(huán);7為鉸鏈;8為掌背固定架圖9 傳動結(jié)構(gòu)圖Fig.9 Transmission structure diagram
外骨骼擺桿為傳動過程中的核心部件,起到將舵機的機械能轉(zhuǎn)換成為外骨骼指節(jié)動能的作用。如圖10所示,外骨骼擺桿受到以舵機轉(zhuǎn)軸為中心的扭矩M,受到外骨骼指節(jié)側(cè)面圓柱狀懸臂梁的支持力F,該力的方向垂直于兩構(gòu)件接觸的切線方向。此時該支持力F相對于舵機轉(zhuǎn)軸圓心距離d為10 mm。假設(shè)其中M=0.02 N·m。
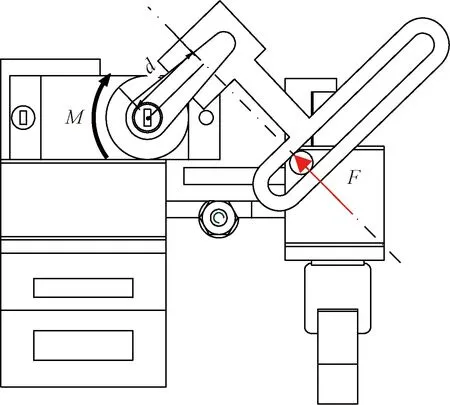
圖10 外骨骼擺桿受力分析圖Fig.10 Force analysis of the exoskeleton rocker
根據(jù)理論力學(xué)靜力學(xué)公式分析方法可知,系統(tǒng)總力矩為零,即
∑M=0
(2)
由圖10中受力分析可得
M=Fd
(3)
代入數(shù)值計算得到F為20 N。
2.2 外骨骼指節(jié)可伸縮結(jié)構(gòu)設(shè)計原理與分析
由于需要適應(yīng)不同尺寸的手指,并且手指彎曲時指節(jié)之間的長度會發(fā)生變化,所以在外骨骼指節(jié)內(nèi)設(shè)計兩個滑孔用于滑動鉸鏈。如圖11所示,圓柱狀懸臂通過與外骨骼擺桿的內(nèi)槽壁相切配合,可以自由在槽口內(nèi)滑動旋轉(zhuǎn),進一步傳遞舵機的機械能。舵機固定螺紋孔將舵機安裝后避免舵機因環(huán)境震動因素而錯位。滑桿可在雙滑孔內(nèi)自由進行滑動。手指固定環(huán)的配合孔與手指固定環(huán)為過盈配合。
如圖12所示,將各個外骨骼指節(jié)與鉸鏈裝配后,3個鉸鏈錯位放置,避免互相干涉影響運動,可以有效地完成手指外骨骼指節(jié)間可自由變化長度的功能。
如圖13所示,當手指穿戴上外骨骼后,外骨骼受到來自手指本身現(xiàn)有狀態(tài)下的支持力F,方向豎直向上。來自舵機通過外骨骼擺桿傳遞而來的F′與外骨骼擺桿所受的F共同組成一對作用力與反作用力,因此F在平衡狀態(tài)的值為20 N。在該外骨骼指節(jié)靜力學(xué)系統(tǒng)中,僅受到兩個力矩的作用。根據(jù)理論力學(xué)靜力學(xué)分析可知,在保持平衡狀態(tài)下的物體合外力與合外力矩相等,若手指提供的支持力大于或等于舵機傳動而來的壓力,則手指外骨骼將無法帶動外骨骼指節(jié)進行彎曲運動,即在初始力矩較小的情況下系統(tǒng)將會保持靜止狀態(tài)。
由于鉸鏈可在外骨骼指節(jié)內(nèi)的滑孔自由滑動,在舵機帶動擺桿進行運動時,由擺桿傳遞F′到圓柱狀懸臂,將F′分解為豎直向下及水平向右的兩個分力,此時若F′豎直向下的力大于F,外骨骼指節(jié)實現(xiàn)以鉸鏈為圓心的順時針轉(zhuǎn)動;同時F′的水平向右的力使外骨骼指節(jié)沿水平方向做直線運動。這兩個運動軌跡的合成共同構(gòu)成了外骨骼指節(jié)的實際運動。

1為圓柱狀懸臂;2為舵機固定螺紋孔;3為雙滑孔;4為手指固定環(huán)的配合孔圖11 外骨骼指節(jié)結(jié)構(gòu)Fig.11 The structure of the exoskeleton knuckle
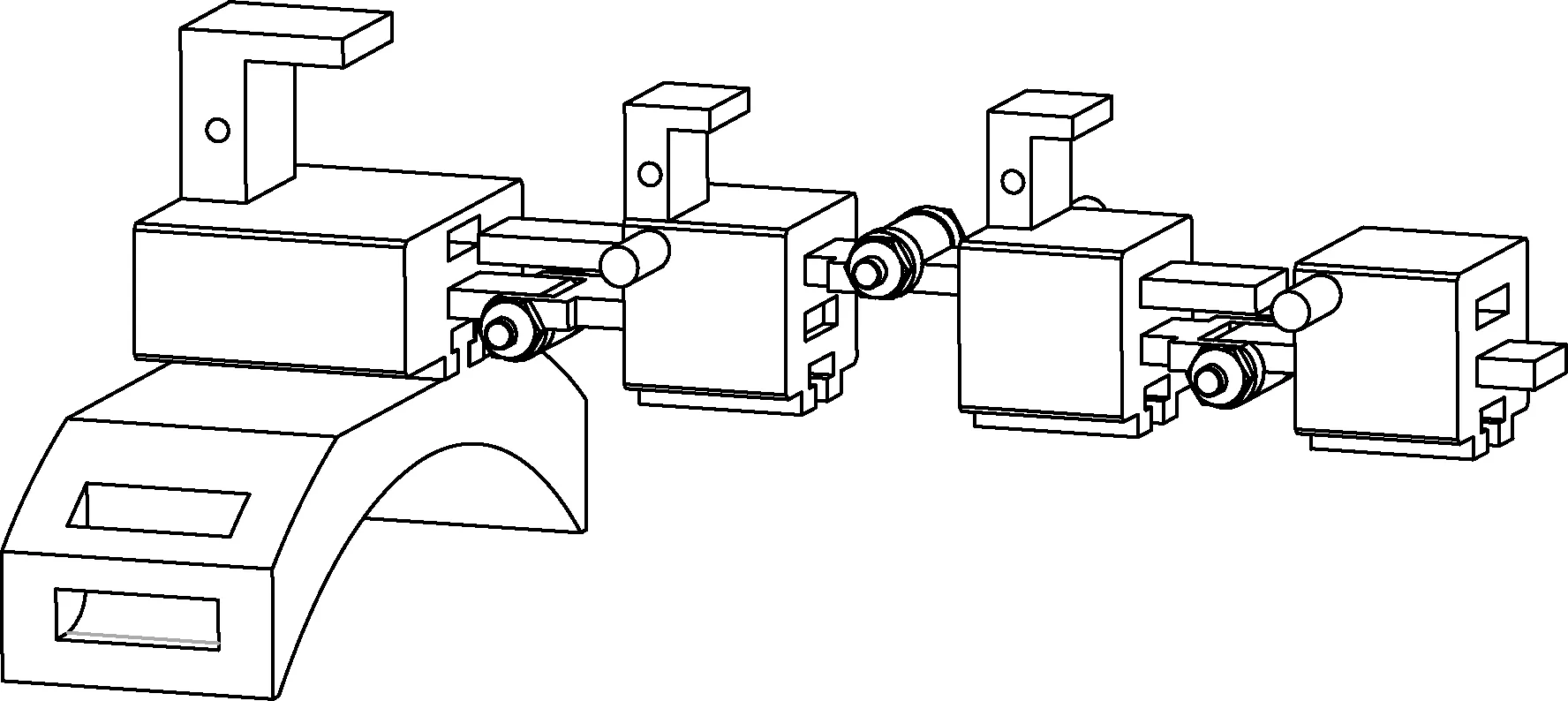
圖12 外骨骼指節(jié)可伸縮機械結(jié)構(gòu)Fig.12 The structure of the scalable mechanism
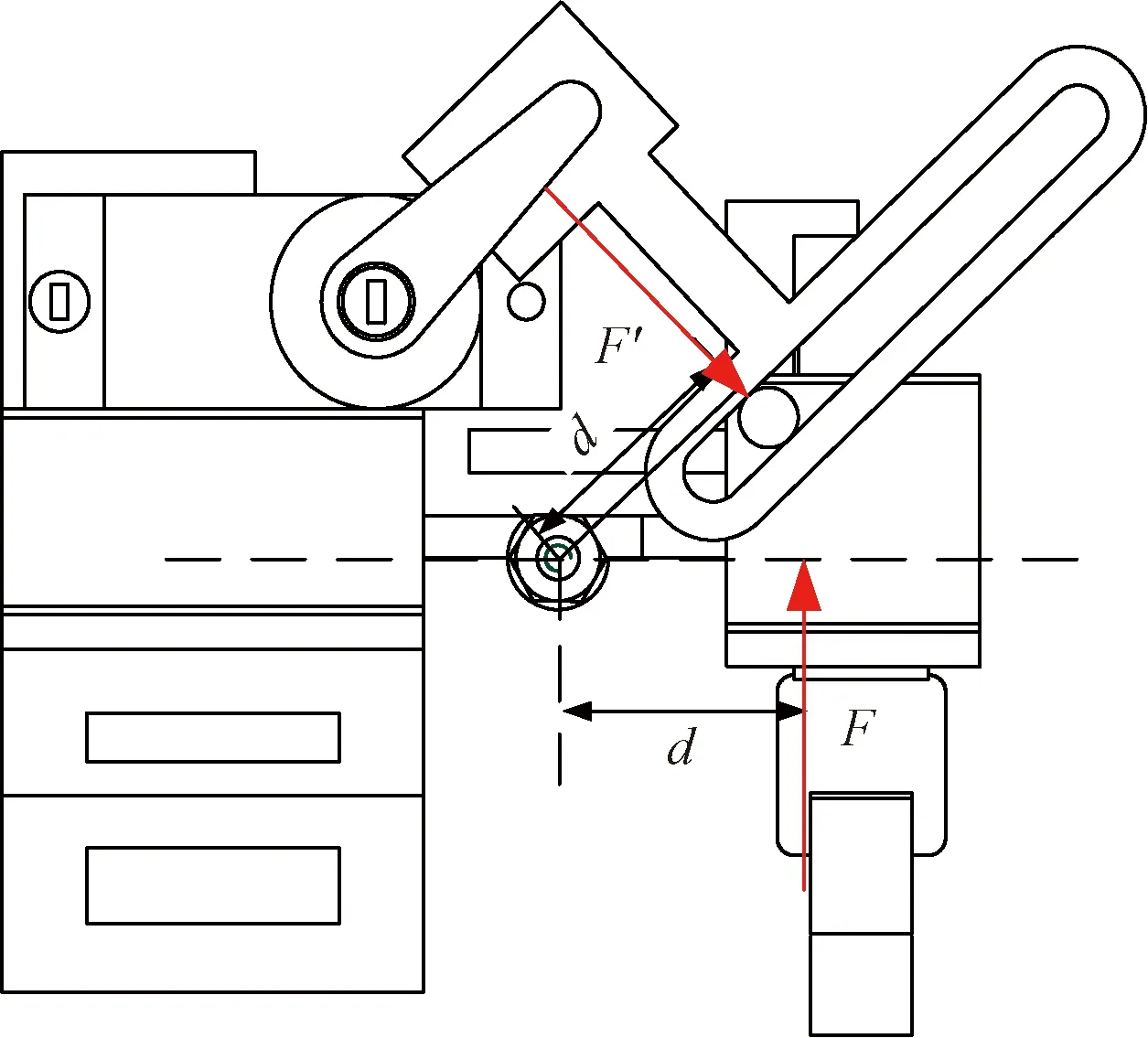
圖13 外骨骼指節(jié)受力分析示意圖Fig.13 Force analysis of the exoskeleton knuckle
2.3 手指固定結(jié)構(gòu)設(shè)計原理與分析
如果使用圓環(huán)狀的指環(huán)套入手指指節(jié)中間,每根手指3個指節(jié)的大小是遞減的,根據(jù)手指各指節(jié)相應(yīng)的橫截面參數(shù)進行設(shè)計特定的圓環(huán),這樣的方案將會導(dǎo)致不同人群都要定制特殊尺寸的圓環(huán),因此該方案不可行。于是考慮采用魔術(shù)貼來適應(yīng)指節(jié)尺寸的變化。設(shè)計方案為使用魔術(shù)貼配合機械零件共同組成一個指環(huán),魔術(shù)貼通過針線縫合,可以很容易調(diào)節(jié)指環(huán)的大小,并且魔術(shù)貼具有材質(zhì)柔軟、彎曲性能與韌性強、耐用的特點,很適合作為手指固定指環(huán)的組成材料。圖14所示為指環(huán)的設(shè)計示意圖,其中手指固定架的上端工字形結(jié)構(gòu)設(shè)計用于與外骨骼指節(jié)配合。

1為手指固定架;2為魔術(shù)貼圖14 外骨骼指環(huán)結(jié)構(gòu)Fig.14 The structure of the exoskeleton ring
3 手指外骨骼機器人整體機械結(jié)構(gòu)
圖15所示為手指外骨骼機器人整體結(jié)構(gòu)圖。外骨骼電子控制系統(tǒng)通過控制該機械機構(gòu)執(zhí)行運動,每個關(guān)節(jié)的彎曲或伸展運動均可同時進行,幫助患者實現(xiàn)受傷手指的康復(fù)訓(xùn)練。根據(jù)普通人手指指長在6~10 cm,指寬在1.5~3 cm合理設(shè)計各零件尺寸。在該機械結(jié)構(gòu)中,3個魔術(shù)貼指環(huán)可以方便快捷地將手指進行固定,3個外骨骼指節(jié)的尺寸與人體指節(jié)尺寸相當,其中使用3個舵機通過連桿將扭力直接傳遞到手指上,避免了多級傳動過程中的能量損耗,并且該手指外骨骼整體結(jié)構(gòu)緊湊,占用空間不大,在日常不使用時便于收納。手指外骨骼機器人的主要機械原件使用3D打印的方法加工,加工過程綠色、環(huán)保,所加工的零件精度高,成本低。
所設(shè)計的手指外骨骼可以適應(yīng)不同人群和不同手指長度。由于同一手掌上的食指與中指的總長度一般是不相同的,而且每個對應(yīng)指節(jié)長度也均有不同,為了驗證設(shè)計的合理性進行了穿戴實驗。選擇右手的食指和中指進行手指外骨骼機器人的穿戴實驗。穿戴實驗結(jié)果如圖16所示,可以明顯地看到,外骨骼機器人與手指契合度高,沒有零件間的干涉影響。
除了驗證穿戴功能外,還需要驗證手指外骨骼在電子控制驅(qū)動下手指彎曲的效果,通過控制電機,觀察到手指外骨骼可以完成帶動手指彎曲與伸直的功能,符合預(yù)期的效果,具有幫助患者進行康復(fù)訓(xùn)練的能力。由圖17看出,在彎曲到極限角度后,手指與外骨骼共同組成的結(jié)構(gòu)穩(wěn)定,無安全隱患。

圖15 手指外骨骼整體結(jié)構(gòu)Fig.15 The structure of the finger exoskeleton
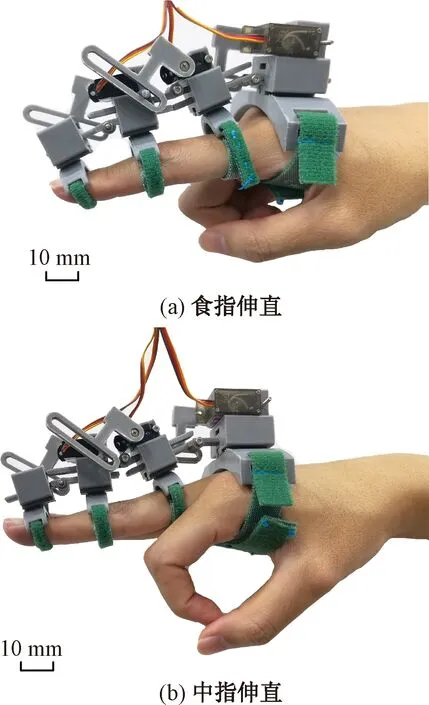
圖16 食指與中指伸直穿戴效果圖Fig.16 Application effects of the straight forefinger and the straight middle finger
4 實驗分析
通過樣機的佩戴實驗,測量各個關(guān)節(jié)的運動角度,如表1所示,除MP部分與預(yù)計運動角度有偏差外,PIP及DIP部分均可滿足預(yù)期運動角度,可滿足康復(fù)運動的角度要求;如圖18所示,在抓握實驗中,可以正常滿足生活中大部分場景的運動要求,如抓握水杯、抓握水果等。
由于中指部分掌背舵機固定架與掌背固定架位置相對固定,因此在外骨骼運動時,出現(xiàn)中指的MP部分角度相對較小的現(xiàn)象,后續(xù)工作會對掌背舵機固定架與掌背固定架進行結(jié)構(gòu)改進。
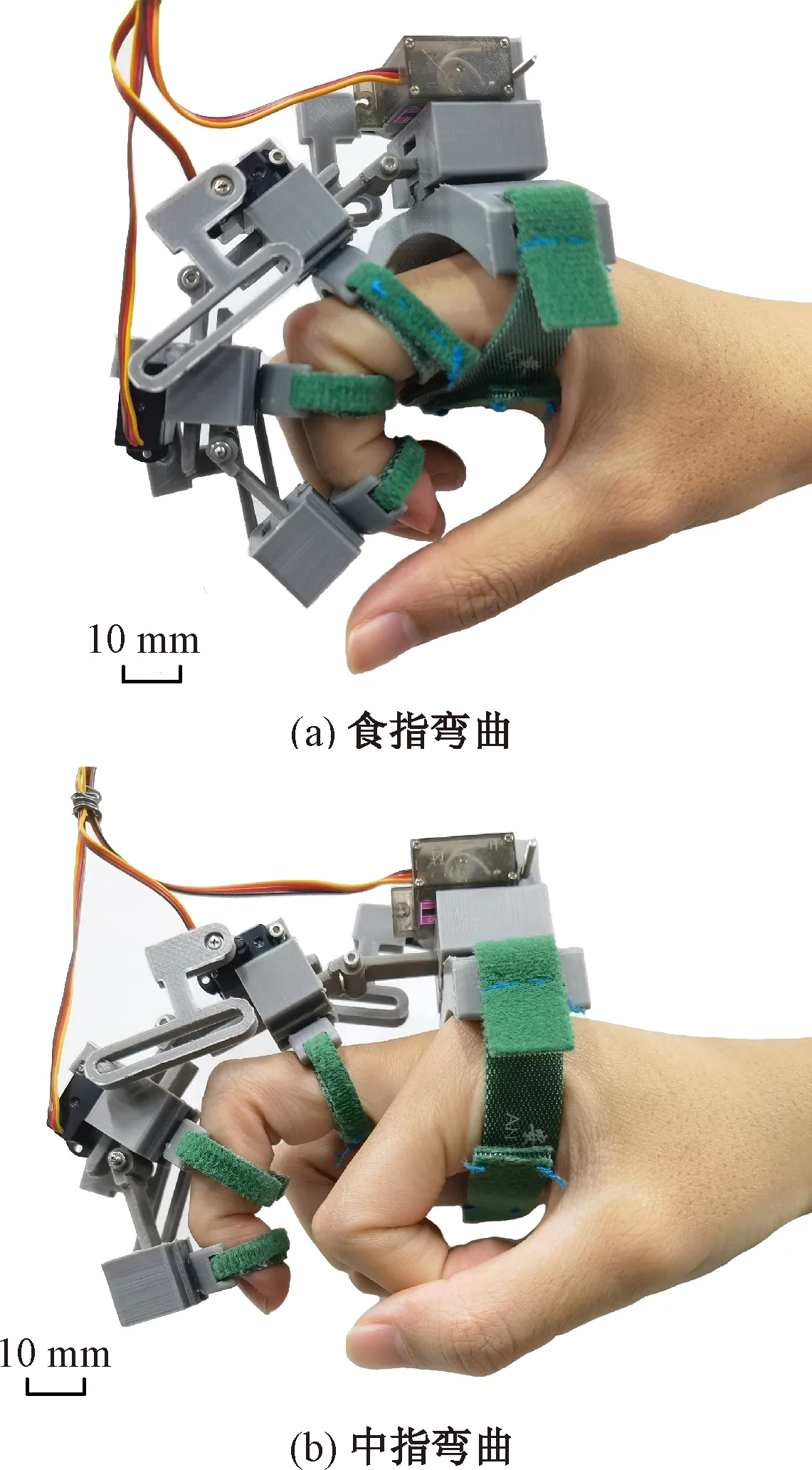
圖17 食指與中指彎曲穿戴效果圖Fig.17 Application effects of the bent forefinger and the bent middle finger

表1 手部外骨骼運動角度表Table 1 Angle of exoskeleton movement of hand
5 結(jié)論
為了實現(xiàn)對手指的康復(fù)訓(xùn)練,從簡單的雙搖桿機構(gòu)出發(fā)對手指外骨骼進行設(shè)計。3個雙搖桿機構(gòu)的組合能夠滿足手指三自由度的康復(fù)訓(xùn)練需求。考慮到手指外骨骼的廣泛適用性,將雙搖桿機構(gòu)組合的定長連桿改用被動滑動模塊,解決了不同尺寸手指都能舒適佩戴的問題。手指外骨骼采用3D打印制作,該制作過程綠色、環(huán)保、成本低,并且3D打印材料質(zhì)量輕,不會對手指造成過重負擔。最后通過樣機的佩戴實驗驗證了所設(shè)計的手指外骨骼與手指的運動配合度高,為后續(xù)的康復(fù)實驗奠定了基礎(chǔ)。下一步研究工作將圍繞手指外骨骼的控制系統(tǒng)進行。

圖18 手部外骨骼抓握實驗圖Fig.18 Hand exoskeleton grasping experiment
