車輛軌跡的預瞄與模糊分數階比例-積分-微分控制
2022-07-28 06:57:56羅鵬李擎董祿
科學技術與工程 2022年17期
羅鵬, 李擎*, 董祿
(1.北京信息科技大學自動化學院, 北京 100101; 2.高動態導航技術北京重點實驗室, 北京 100101)
隨著人工智能技術的蓬勃發展,人工智能與汽車結合的無人駕駛車輛成為一種必然趨勢。無人駕駛車輛的任務是根據實時路況,識別并評估周圍環境與障礙,規劃車輛運行路徑,跟蹤該路徑實現車輛的質心運動控制[1]。軌跡跟蹤作為無人駕駛的重要組成,其研究目前得到廣泛關注。
軌跡控制方法要同時保證車輛在行駛過程中的準確性與穩定性。現階段軌跡控制方法主要包括:比例-積分-微分(proportion-integration-differentiation,PID)控制[2-4]、滑模變結構控制[5-6]、模型預測控制(model predictive control,MPC)[7-9]和線性二次型調節控制(linear quadratic regulation,LQR)[10-11]等。
PID控制器簡單有效,但是對于非線性系統效果不佳并且參數整定工作量大。MARINO等[3]提出了基于串級PID的側向控制方法,這種方法在大范圍內不能使側向位移實現漸進收斂,并且忽略了執行器約束對控制器效果的影響。趙盼等[4]設計了一種基于小腦神經網絡與PID結合的無人駕駛車輛軌跡控制算法,該方法針對控制模型不精確以及其他干擾引起的控制不確定等問題,提供了可行解決辦法。然而隨著增加輸入維度,神經網絡的權值系數的儲存空間急劇增加。
滑膜變結構控制在參數不確定與存在外部干擾情況下具有魯棒性,但滑模變結構控制不可避免地存在抖振問題,對系統造成機械磨損、增大能耗[12]。Tagne等[13]為了使車輛側向位移的誤差漸進收斂設計了一種高階超螺旋滑模控制器,并減緩滑模面附近的抖振現象。但控制器的設計并沒有考慮約束條件,而實際的非線性控制系統存在一些硬約束條件,這樣會使控制系統受到飽和非線性約束。
模型預測控制(MPC)是一種系統地考慮預測信息同時能處理多約束條件的控制方法。梁忠超等[7]設計一種自適應模型預測控制的無人駕駛車輛軌跡跟蹤控制策略。在軌跡控制有良好的控制精度,但精度的提高伴隨著約束條件維度增加,加大了計算難度。
線性二次型調節器(LQR)是利用目標函數達到系統的最優狀態的線性控制器。吳晟博等[14]基于車輛動力學模型,設計了帶有前饋補償和反饋的最優控制線性二次型軌跡跟蹤控制器。提高了車輛對參考軌跡的跟蹤精度,由于線性二次型調節器本質上是根據線性系統設計的無約束優化控制器,在特征明顯的非線性工況下軌跡跟蹤的控制精度會降低。
現根據車輛動力學特性并考慮執行器約束,引入預瞄誤差模型,設計分數階PID控制器,同時根據優化模糊控制器對分數階PID參數進行調整,從而對車輛軌跡進行控制。
1 車輛控制系統
車輛軌跡控制系統由預瞄誤差模型、模糊分數階PID控制器、車輛動力學模型組成。車輛控制系統組成圖如圖1所示。
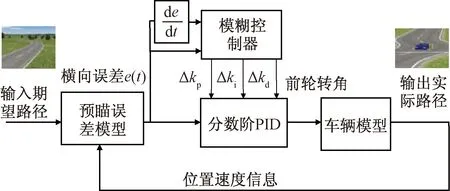
圖1 車輛控制系統組成圖Fig.1 Vehicle control system composition
預先設置的輸入期望路徑與輸出的實際路徑通過預瞄誤差模型計算出橫向誤差e(t)。車輛橫向誤差e(t)為分數階PID控制器的輸入變量,同時車輛橫向誤差e(t)以及車輛橫向誤差變化率ec(t)作為模糊控制器兩個輸入量,根據設置的模糊規則推算得到分數階PID參數的3個補償量Δkp、Δki、Δkd,實現參數調整。最后控制器輸出的前輪轉角δf,行駛車輛通過轉動方向盤調整轉角從而如實現路徑的跟蹤。
1.1 車輛動力學特性
在滿足車輛軌跡控制精度與行駛穩定性要求的前提下,忽略以下因素:①車輛的垂直方向上運動;②由于車輛載荷變化及輪胎轉向造成的影響;③懸架運動、空氣動力的影響。
忽略以上因素得到三自由度動力學模型。如圖2所示,O-XY為地心參考坐標系,o-xy為以車輛質心為原點的載體坐標系,坐標系都符合右手定則。
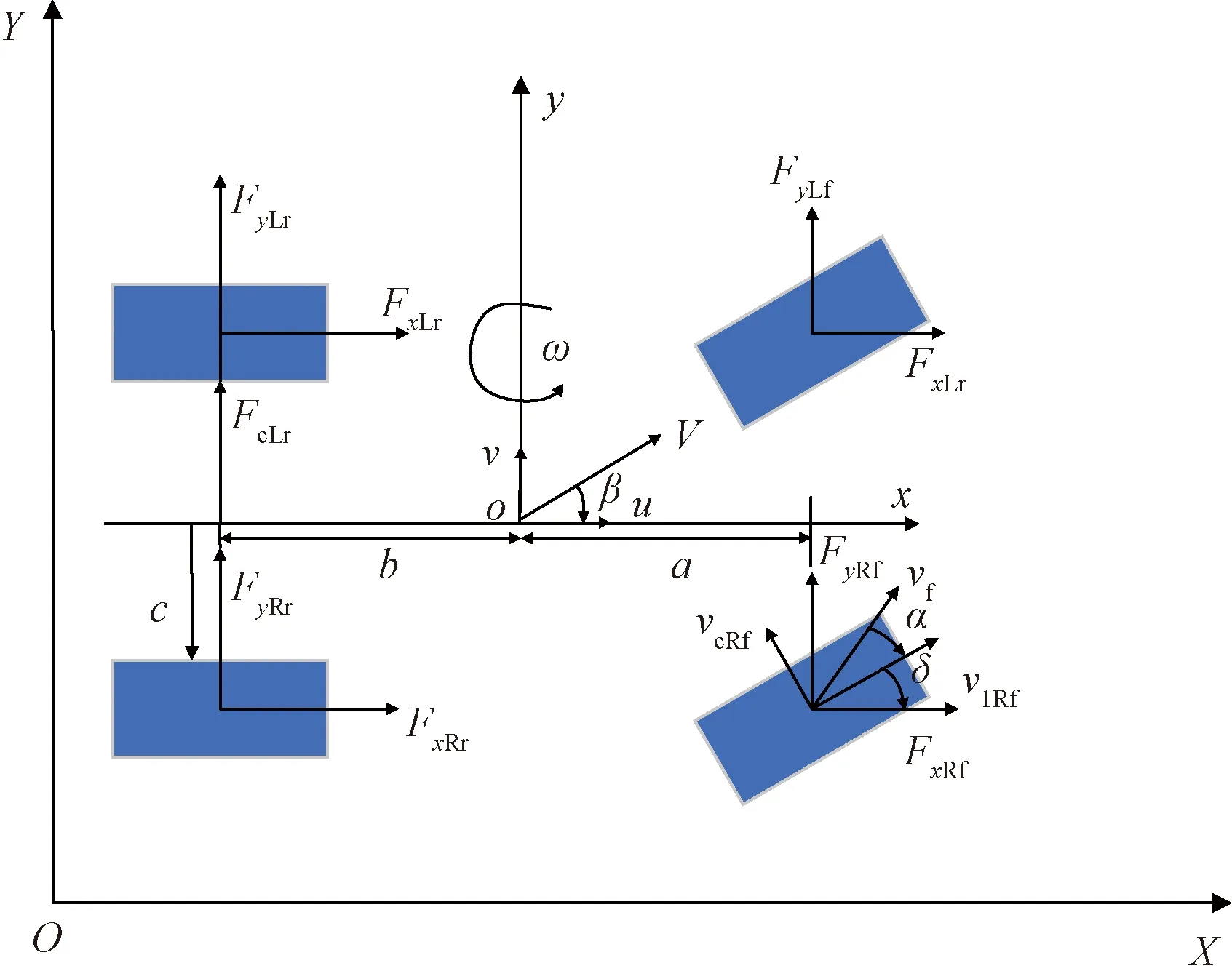
FxLf、FyLf、FxRf、FyRf、FxLr、FyLr、FxRr、FyRr分別為4個輪胎所受縱向和橫向的力;m為車輛質量;v為車輛橫向速度;u為車輛縱向速度;V為車輛行駛速度;ω為橫擺角速度;a為質心到前軸距離;b為質心到前軸距離;c為輪胎到車輛中心軸距離;β為質心側偏角;α為輪胎側偏角;δ為前輪轉角;vlRF、vcRf分別為左前輪胎的縱、橫向速度圖2 車輛三自由度動力學模型Fig.2 Three-degree-of-freedom dynamics model of vehicle
為了保證車輛側向穩定性,考慮安全約束的車輛橫擺角定義為
(1)
考慮到車輛執行器約束,前輪轉角的范圍應為
(2)
得到車輛的三自由度動力學模型為
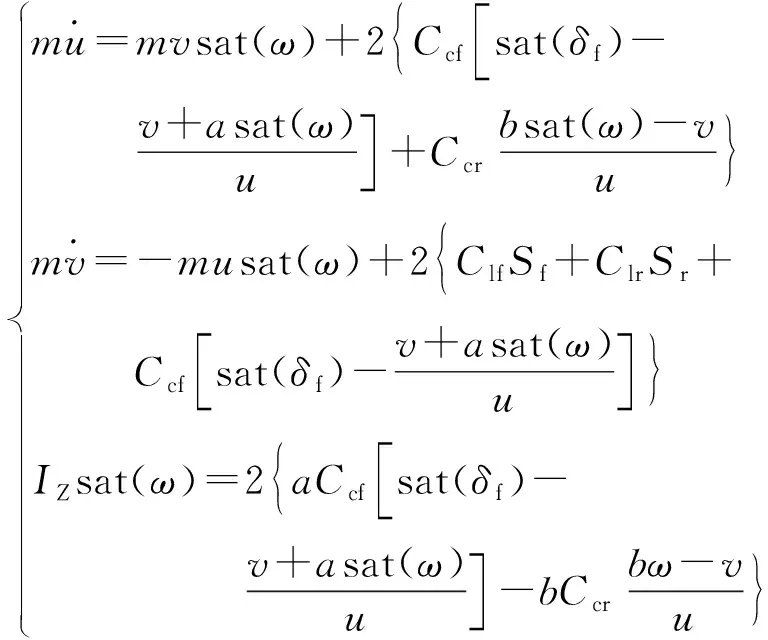
(3)
式(3)中:Iz為車輛的轉動慣量;Cl、Cc分別為車輪的縱向與側向剛度;Ccf、Ccr、Clr、Clf分別為前后輪胎的側向剛度和縱向剛度;Sf、Sr分別為前后輪滑移率;δf為前輪轉角;u為車輛縱向速度;v為車輛橫向速度。
1.2 預瞄誤差模型
引入橫向預瞄誤差模型,預測車輛行駛到設定預瞄距離處時,車輛行駛位置與期望路徑中心線的橫向誤差大小。根據預瞄橫向誤差的大小調節前輪轉角,實現對期望軌跡的跟蹤控制。
如圖3所示,車輛質心到路徑中心線的橫向誤差變化率可化簡為

A、B為車輛前后兩端位置點;C為車輛質心位置點;D為車輛前方預瞄點;yy和ys分別為車輛質心處和前方預瞄點到路徑中心線處的橫向誤差;yf和yr分別為車輛前后端到路徑中心線的橫向誤差;df和dr分別為車輛質心處位置到車輛前后兩端的距離;ψr為車身縱軸和路徑中心線切線之間的夾角;Ls為預瞄距離圖3 預瞄誤差模型Fig.3 Preview error model
(4)
由圖2所示得

(6)
整理得

=yy+Lssinψr
(7)
由于ψr角度非常小,即可化簡為
ys=yy+Lsψr
(8)
對ys求導可得

(9)
將式(5)代入式(9)得

(10)
綜上所述,橫向誤差預瞄模型建立完成。
2 模糊分數階PID控制器設計
2.1 分數階微積分定義
采用Grunwald-Letnikov分數階微積分[15]計算,令函數u(t)在區間[a,b]上連續,假若u(t)在區間[a,t]內有m+1階連續可導;整數m至少取到次數為μ,而且滿足:
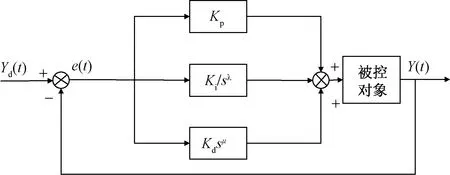
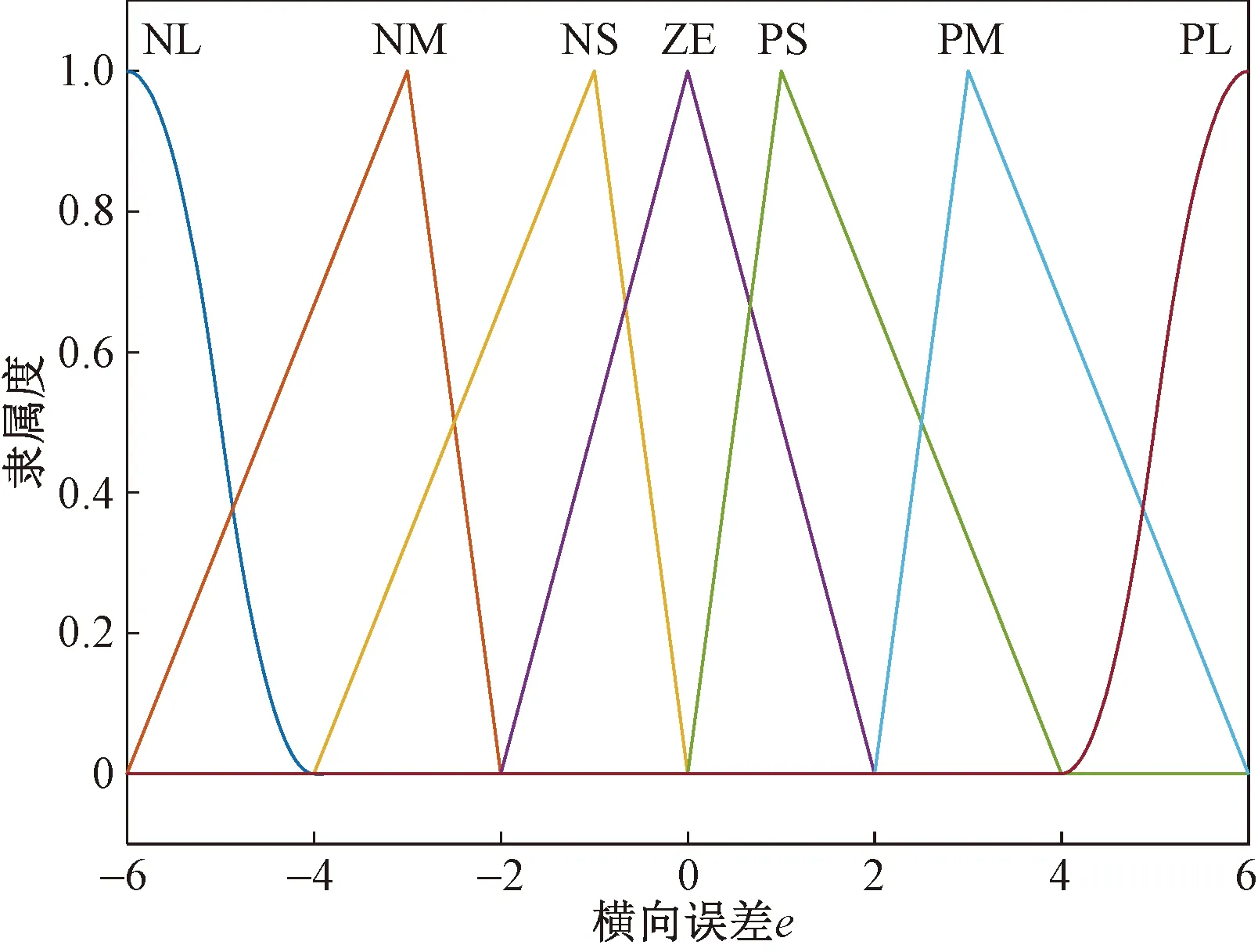
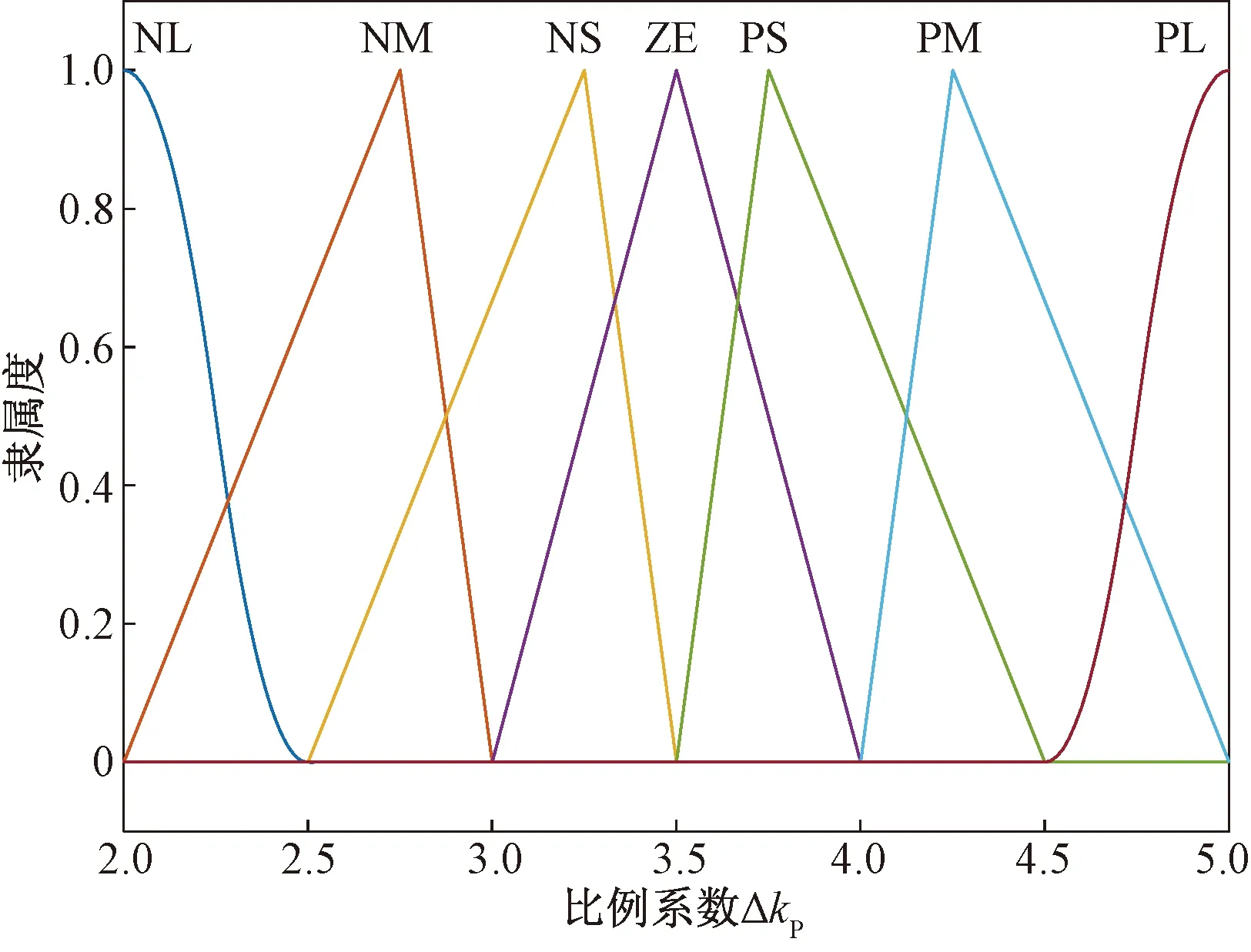
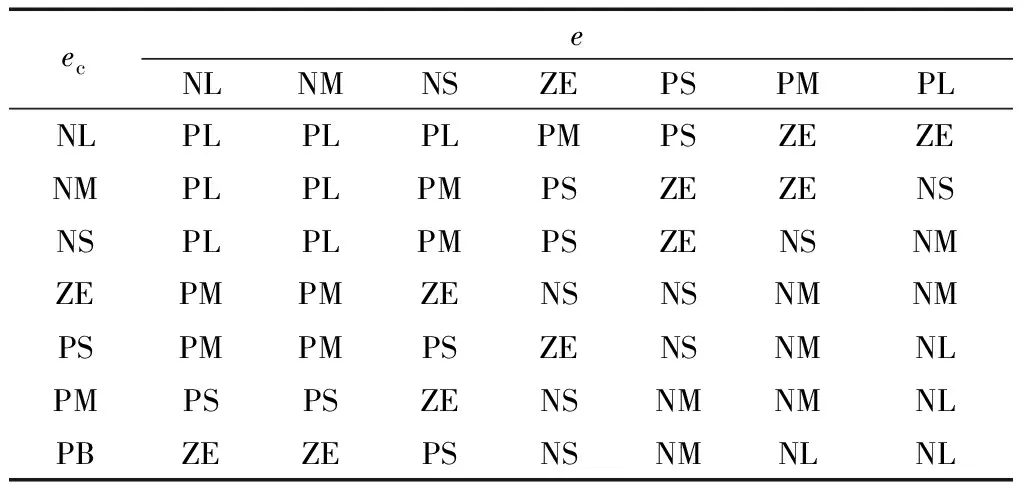
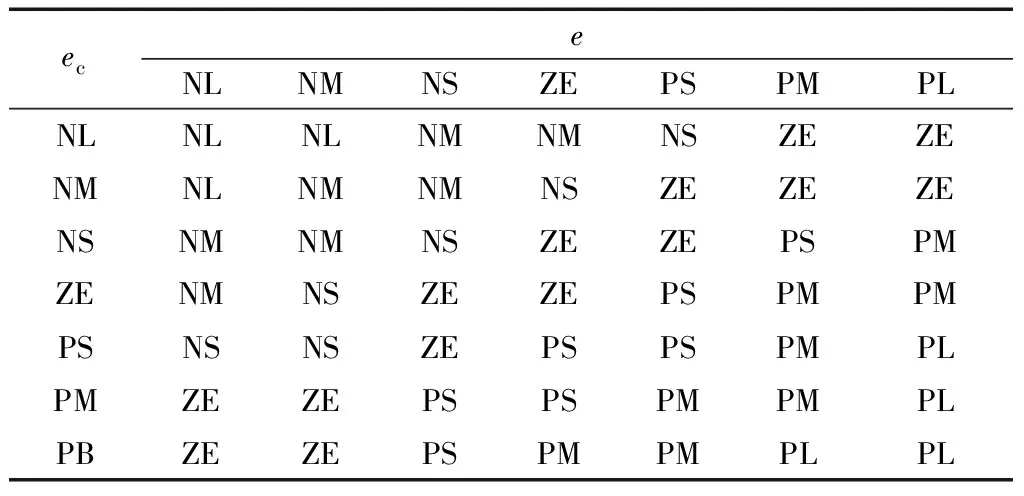
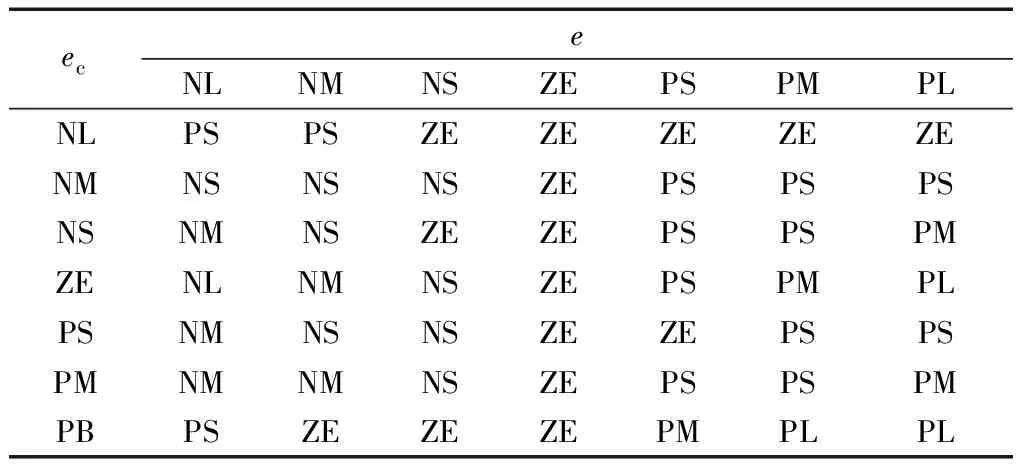
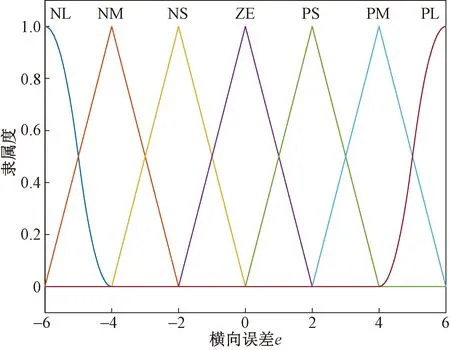
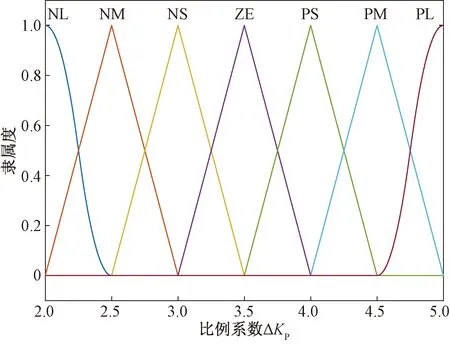
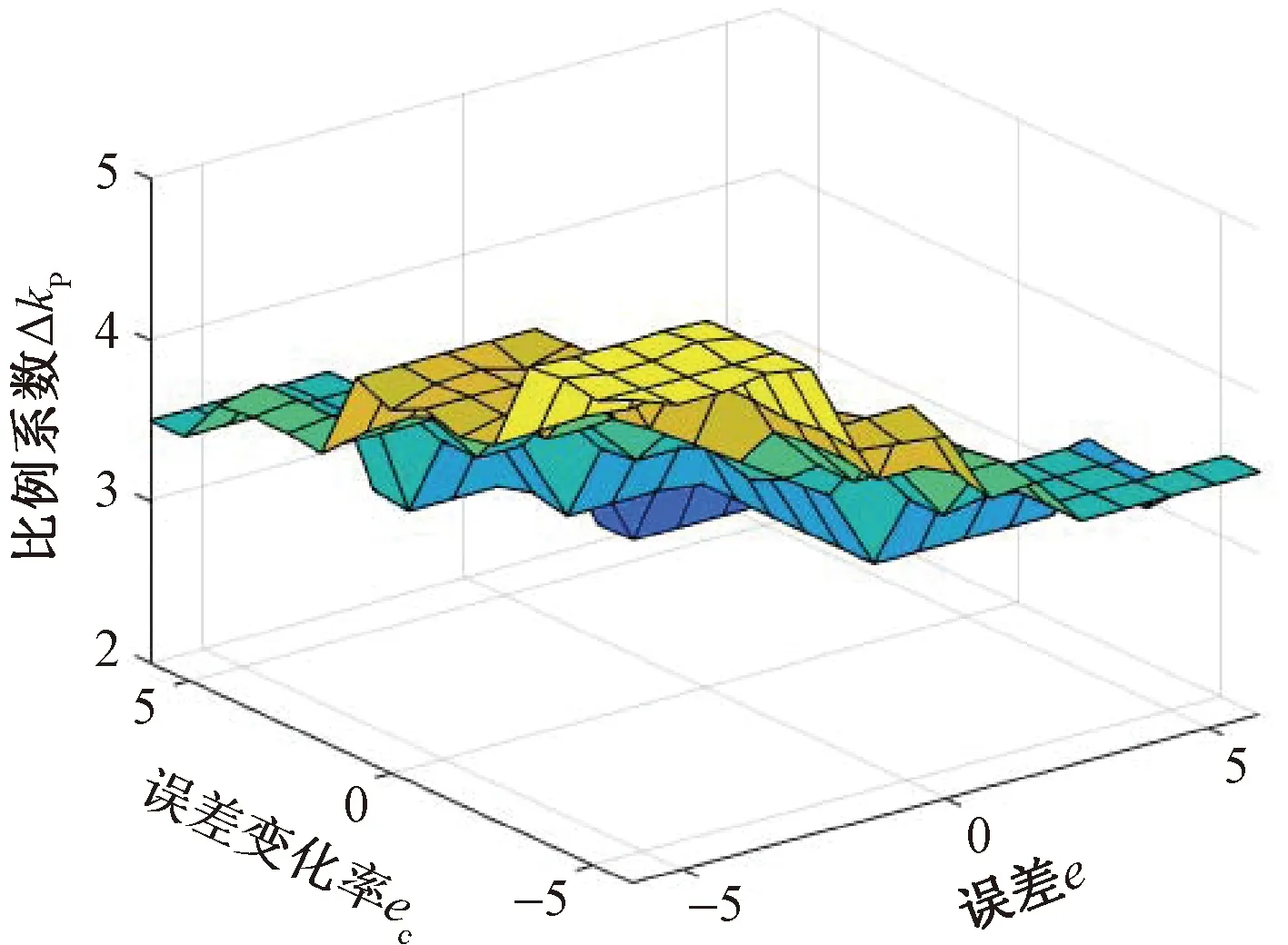
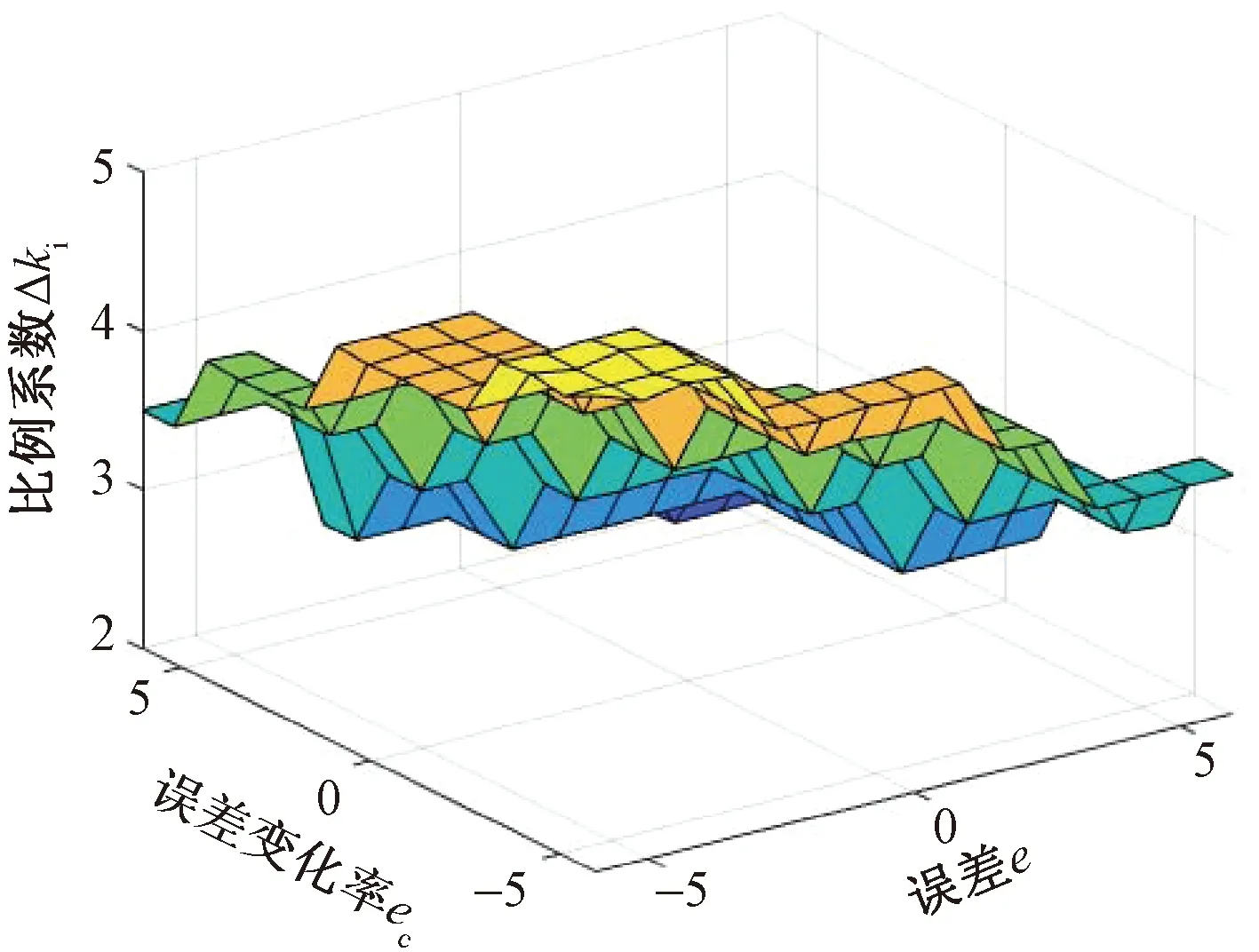
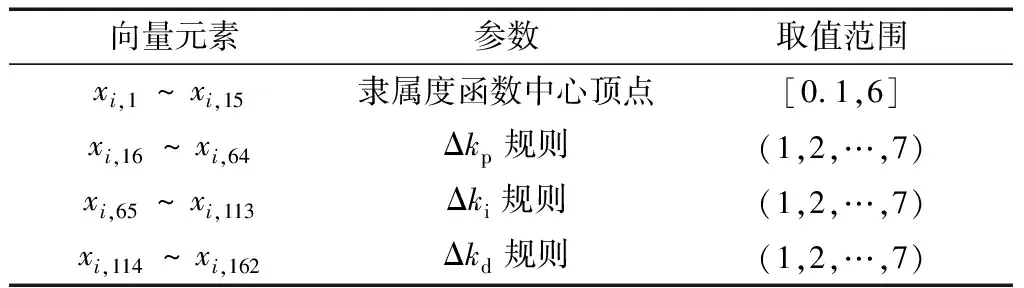
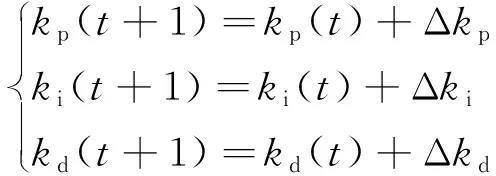
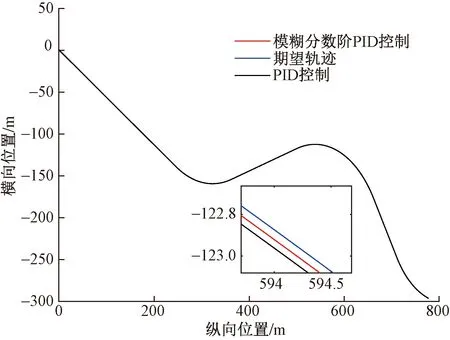
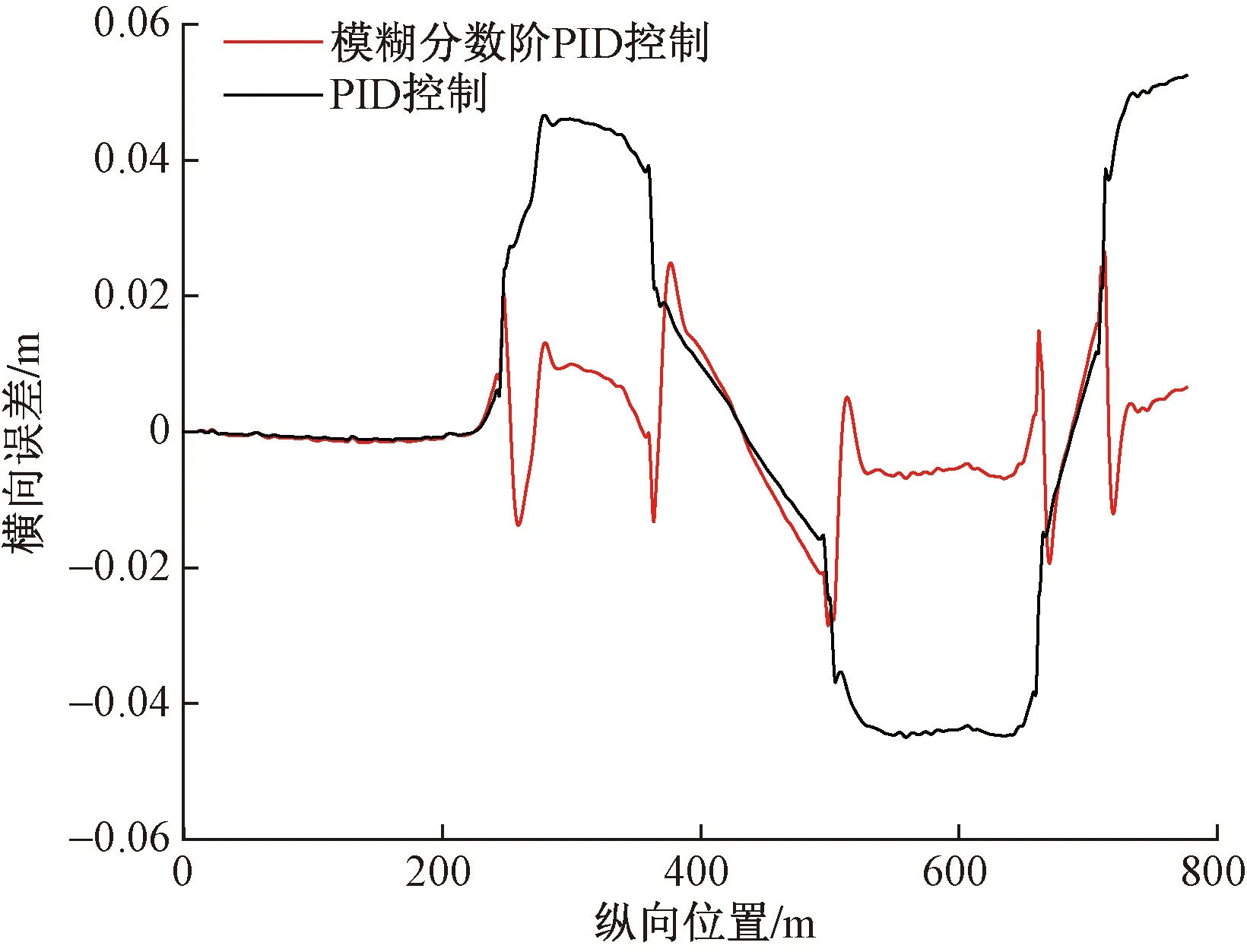
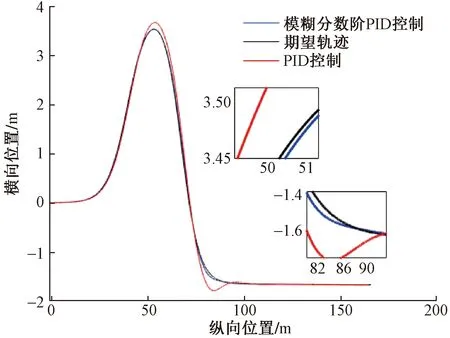
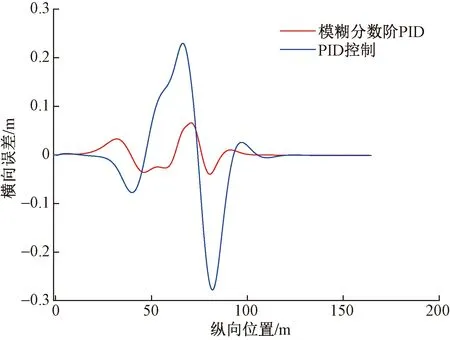
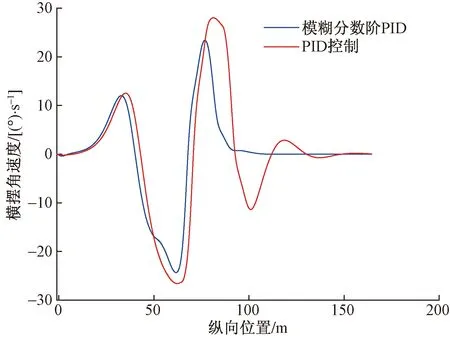
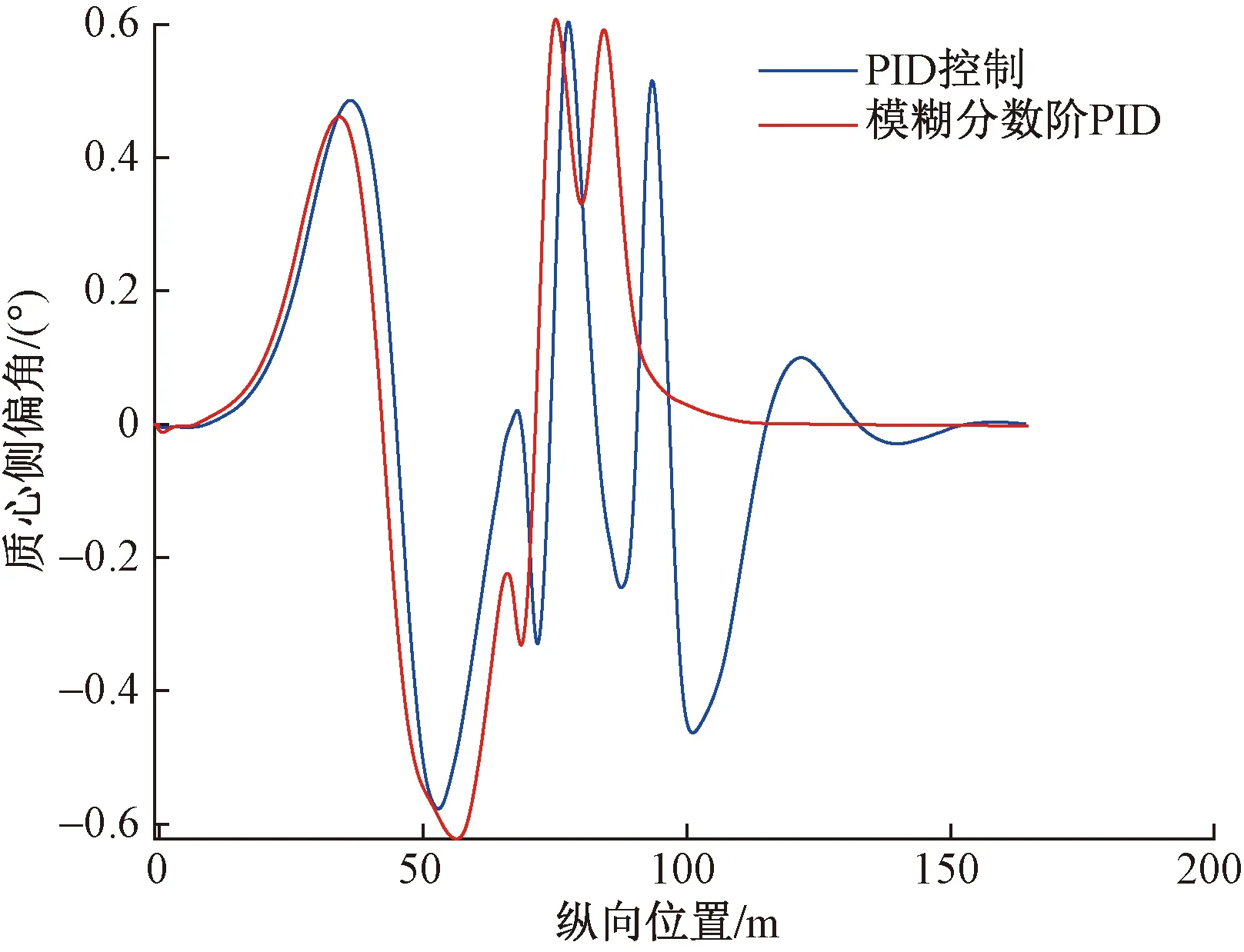
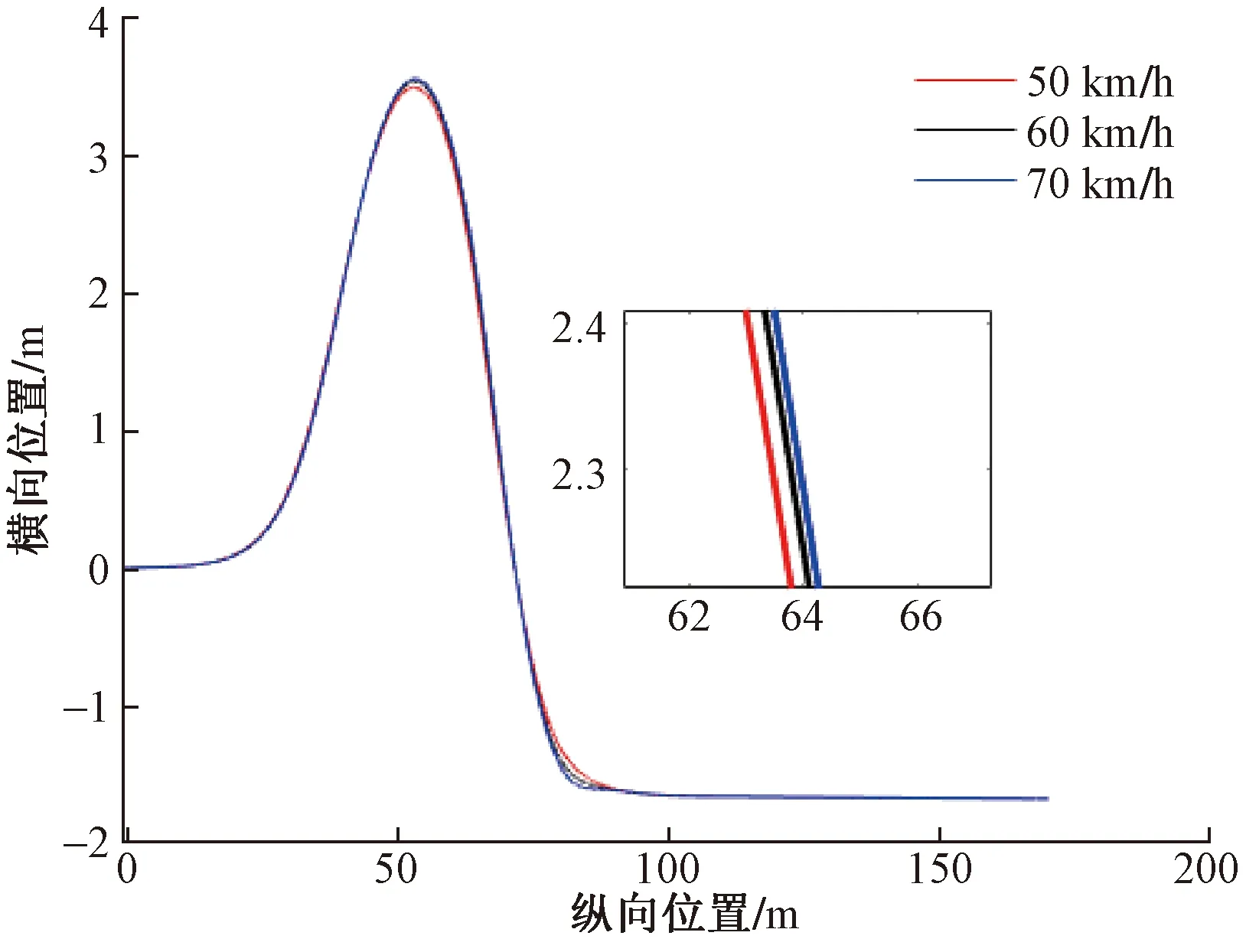
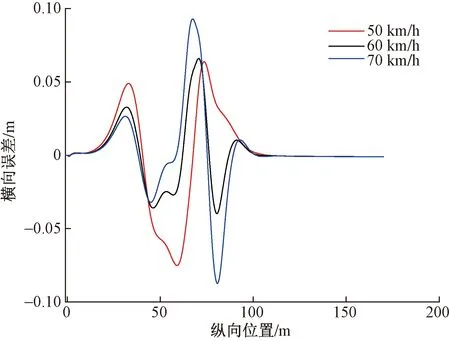
m<μ (11) 可得定義下的分數階積分為 (12) 為增強控制系統的操作靈活性,引入分數階理論,設計分數階PID控制器。分數階PID控制器除PID控制器中的kp、ki、kd3個參數之外,還包括積分階次λ與微分階次μ。分數階PID控制器原理框如圖4所示。 控制律一般為 Yd(t)為控制器設定的期望輸入值;Y(t)為控制器的實際輸出值;e(t)為控制器的輸入值與輸出值之間的誤差;kp、ki、kd分別為PID控制器中的比例系數、積分系數、微分系數圖4 分數階PID控制器結構框圖Fig.4 Structure diagram of fractional order PID controller u(t)=kpe(t)+kiS-λe(t)+kdSμe(t) (13) 式(13)中:λ為積分階次;μ為微分階次;Sμ和S-λ分別表示對系統誤差e(t)的μ階導數和λ階積分。 分數階PID控制器中λ和μ可以在0~2進行任意調節,這樣就會使分數階積分的滯后相角和微分環節的超前相角從原來的0°~90°擴展到0°~180°[16]。分數階的引入能使參數整定由點整定轉變成面整定。同時分數階中的微積分具有存儲記憶功能。綜上所述分數階PID可以對系統進行更優的控制。 車輛是高度非線性化的復雜系統,車輛的狀態在運動過程中隨外部道路環境變化。為了提高控制器的魯棒性,構建優化的模糊分數階PID控制器。首先,根據現有的專家知識和經驗建立初始模糊規則;其次,利用粒子群優化(particle swarm optimization,PSO)對隸屬度函數以及模糊規則進行優化;最后,通過粒子群算法優化后的模糊控制器對分數階PID控制器的參數進行在線調節。 2.3.1 模糊控制器 將車輛預瞄橫向誤差值e(t)及其變化率ec(t)作為模糊控制器的兩個輸入變量,Δkp、Δki、Δkd為模糊控制器的3個輸出變量,用于補償修正分數階PID控制器。輸入變量e(t)、ec(t)和輸出變量Δkp、Δki、Δkd對應的模糊量分別為E、EC和U1、U2、U3。定義E、EC、U1、U2和U3的模糊子集都為{NL,NM,NS,ZO,PS,PM,PL},其中模糊子集中變量為NL(負大),NM(負中),NS(負小),ZE(幾乎為零),PS(正小),PM(正中),PL(正大)。車輛橫向誤差e(t)及其變化率ec(t)的論域都定義為[-6,6],模糊控制器3個輸出信號Δkp、Δki、Δkd的論域分別定義為[2,5]、[1,2]、[0,1]。輸入信號與輸出信號的隸屬度函數包含有三角形函數、s形函數與z形函數。輸入變量e(t)與輸出變量Δkp的隸屬度如圖5、圖6所示。 圖5 優化前e(t)的隸屬度函數Fig.5 Membership function of e(t) before optimization 圖6 優化前Δkp的隸屬度函數Fig.6 Membership function of Δkpbefore optimization 由上述定義可知,輸入變量e(t)和ec(t)的模糊集都為7個,根據輸入變量e(t)與ec(t)一一對應原則模糊規則共有49條。按照輸入變量與輸出變量之間的關系建立模糊規則表,輸入變量通過查詢模糊規則表得到輸出變量Δkp、Δki、Δkd,3個輸出變量的模糊規則表分別如表1~表3所示。采用最大隸屬度法進行反模糊化。圖7~圖10為模糊推理表面圖。 2.3.2 PSO優化模糊控制器 上述模糊控制器是在人工經驗的基礎上建立, 表1 Δkp的模糊規則表 表2 Δki的模糊規則表 表3 Δkd的模糊規則表 圖7 優化后e(t)的隸屬度函數Fig.7 Optimized membership function ofe(t) 圖8 優化后Δkp的隸屬度函數Fig.8 Optimized membership function ofΔkp 得到的是一種定性的、不精確的控制。為提高控制效果,采取PSO算法對模糊控制的隸屬度函數以及模糊規則進行優化。 粒子群算法是一種通過粒子的不斷移動尋找到最優解的優化方法,使用PSO算法前需要對隸屬度函數以及模糊規則進行編碼成一個決策向量。表達為 x=[x1,x2,…,xD] (14) 式(14)中:D為需要優化參數的數量。 由模糊控制器可知,控制器的兩輸入車輛橫向誤差e(t)及其變化率ec(t)的論域為[-6,6],三輸出量Δkp、Δki、Δkd論域分別定義為[2,5]、[1,2]、[0,1]。 其中決策向量中變量代表的參數以及參數范圍如表4所示。其中取值范圍數字1~7分別代表NL(負大),NM(負中),NS(負小),ZE(幾乎為零),PS(正小),PM(正中),PL(正大)。 模糊分數階PID控制系統有2個目標函數,分別為軌跡跟蹤誤差函數f1與輸出前輪轉角函數f2,總目標函數可表示為 f=(f1,f2) (15) 通過PSO算法對粒子群朝著目標函數最優的方向移動,即對模糊控制的隸屬度函數與規則進行優化。下面選取部分優化前后隸屬度函數、模糊規則對比圖。 圖9 優化前Δkp的模糊推理規則表面圖Fig.9 Surface diagram of fuzzy inference rules ofΔkpbefore optimization 圖10 優化后Δki的模糊推理規則表面圖Fig.10 Optimized surface diagram of fuzzy inference rules of Δki 表4 決策向量參數 通過設計的優化模糊控制器求出精確的修正值,進行如下的在線調整。 (16) 調整后的參數通過分數階PID控制律得到控制量,從而控制車輛軌跡控制。 采用CarSim/Simulink聯合仿真平臺進行仿真研究, CarSim是由美國MSC公司開發的一款專注于車輛動力學仿真軟件。能夠便捷靈活地設置試驗環境和試驗過程,可以精確預測和仿真汽車整車的操縱穩定性、動力性、平順性等。適應于各種轎車、輕型貨車等車型的建模仿真。利用CarSim軟件中的路徑信息與車輛模型,輸出縱向速度、橫向速度、車身縱軸和路徑中心線切線之間的夾角等參數,輸入為車輛前輪轉角;與Simulink中搭建的預瞄誤差模型與系統控制系統進行模塊連接,并在 CarSim 中進行仿真觀測,至此整體控制系統構建完成。 在跟蹤目標路徑的過程中,進行研究的仿真車輛部分參數如表5所示。車輛輪胎使用Racing Tire運動型輪胎;為有效防止車輛側翻,設置路面附著系數為0.8;為保證車輛的跟蹤精度以及穩定性,設置預瞄誤差模型的預瞄距離為4 m;車輛的仿真行駛速度為 60 km/h;分別選取簡單路徑工況與國際標準的雙移線工況為期望軌跡對所設計的控制器進行仿真研究。 表5 仿真車輛的參數 期望軌跡I由簡單的直線路徑與較緩和的彎曲路段組成。主要驗證由直線路段進入彎曲路段、由彎曲路段進入直線路段的穩定跟蹤軌跡能力。 車輛在PID控制器與模糊分數階PID控制器作用下的軌跡跟蹤對比圖、橫向誤差對比圖分別如圖11、圖12所示。 圖11 車輛軌跡控制對比圖(軌跡Ⅰ)Fig.11 Vehicle trajectory control comparison diagram (trajectory Ⅰ) 圖12 車輛橫向誤差對比圖(軌跡Ⅰ)Fig.12 Vehicle trajectory control comparison diagram (trajectory Ⅰ) 在期望軌跡I的條件下,兩種控制器在直線路段都能使車輛的橫向誤差幾乎為零,說明在直線路徑下兩種都有很好的跟蹤效果,然而直線進入彎曲路段時PID控制器效果欠佳。由圖12可知,在250、350、500以及650 m路徑銜接處橫向誤差會大幅度增加,最大橫向誤差為±0.05 m。在模糊分數階PID控制器的作用下,車輛跟蹤期望軌跡I的橫向誤差會大幅度減小,在路徑各銜接處都能有效地抑制誤差,此時橫向誤差控制在±0.02 m。通過上述仿真研究,設置的控制器較PID控制器最大橫向誤差減少60%。 為進一步研究設計控制器的軌跡跟蹤能力,采用路況復雜惡劣的雙移線工況為期望軌跡Ⅱ進行車輛的跟蹤研究。同樣通過PID控制器與所設計的控制器對軌跡跟蹤精度進行比較。觀測兩種方法下的橫擺角與質心側偏角的差別對比,另外設置不同的車輛行駛速度驗證控制器的適用性。研究仿真圖如圖13~圖16所示。 圖13 車輛軌跡控制對比圖(軌跡Ⅱ)Fig.13 Vehicle trajectory control comparison diagram (trajectory Ⅱ) 圖14 車輛橫向誤差對比圖(軌跡Ⅱ)Fig.14 Vehicle trajectory control comparison diagram (trajectory Ⅱ) 圖15 車輛橫擺角速度對比圖(軌跡Ⅱ)Fig.15 Yaw angle velocity comparison diagram (trajectory Ⅱ) 圖16 車輛質心側偏角對比圖(軌跡Ⅱ)Fig.16 Comparison of sideslip angle of centroid (trajectory Ⅱ) 圖13為相同路況條件下PID控制器與所設計的模糊分數階PID控制器軌跡控制對比圖。由軌跡圖可知,在PID控制器的作用下,車輛在60 m與85 m大曲率處附近與期望軌跡都有較大橫向偏差,如圖14所示,在60 m處附近的橫向誤差為0.229 4 m,85 m處附近的橫向誤差達到峰值0.277 4 m。在模糊分數階PID控制器的作用下,車輛即使在大曲率處附近也能較好地貼近期望軌跡。此時在控制器作用下60 m處附近的橫向誤差減小到0.065 89 m,85 m處附近的橫向誤差更是減小到0.039 29 m,在所設置的控制作用下,車輛的最大橫向誤差減少79.2%。因為橫擺角速度與質心偏移角是影響車輛穩定性的重要因素,選取車輛在兩種控制器的作用的這兩種變量進行對比研究,如圖15、圖16所示,可以直觀看出,車輛在設置的控制器下有著更好的穩定性。 通過上述兩種控制器對比效果可以看出:雖然設置較為惡劣的路況加大跟蹤難度,所設計的控制器提高了車輛軌跡跟蹤的精度,并且車輛更具有穩定性。 為驗證設計的控制器在不同行駛速度情況下的適應性,分別取行駛速度50、60、70 km/h進行比較分析,軌跡跟蹤圖及誤差分析圖如圖17、圖18所示。隨著車輛提高行駛速度,由圖17的軌跡跟蹤圖可知,不同速度下的車輛都能夠有效地進行軌跡跟蹤,圖18對比圖表明不同速度下的橫向誤差都不超過0.1 m,驗證了控制器在不同車速下有著良好的適應性。 圖17 不同速度軌跡控制對比圖Fig.17 Comparison chart at different speeds 圖18 不同速度下橫向誤差對比圖Fig.18 Comparison of transverse errors at different speeds 為了更有效地控制車輛跟蹤,提出了一種基于預瞄控制與優化模糊分數階PID的跟蹤控制器。設計的控制器中加入分數階理論,增加系統調節的空間加快了響應速度。利用粒子群優化后的模糊規則對參數進行調整修正,增強了控制系統的魯棒性。在CarSim/Simulink聯合平臺上進行仿真分析,研究結果表明:車輛在軌跡I工況下進行研究時,設置的控制器相比于PID控制器最大橫向誤差減少60%;在軌跡II(雙移線)工況下,最大橫向誤差減小79%,能夠保持車輛穩定性,并驗證了在不同的行駛速度下依然保持著良好的跟蹤精度。綜上所述,所設計的控制器可行有效,能夠滿足車輛路徑跟蹤要求。
2.2 分數階PID控制器設計
2.3 模糊分數階PID控制器設計
3 仿真實驗及結果分析

3.1 期望軌跡I仿真研究
3.2 期望軌跡Ⅱ仿真研究
4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
