基于CarSim的電動助力轉向系統仿真研究
2022-08-01 01:28:42楊小剛王慧華
河南科技 2022年13期
楊小剛 王慧華
(天津中德應用技術大學,天津 300350)
0 引言
為了提高汽車轉向的穩定性和安全性,提升駕駛舒適度,電動助力轉向(EPS)系統已成為現代汽車的標配電子設備。汽車的轉向輕便性和靈敏性之間存在著矛盾。電動助力系統依靠助力電機提供轉向輔助,采取不同的轉向控制策略,能有效解決轉向的輕便性和靈敏性之間的矛盾[1]。
1 EPS系統的結構和工作原理
EPS系統由電控部件和機械傳動部件組成[2],包括助力控制ECU、轉矩傳感器、前輪速度傳感器、直流電動機、減速器以及齒輪齒條轉向器(見圖1)。
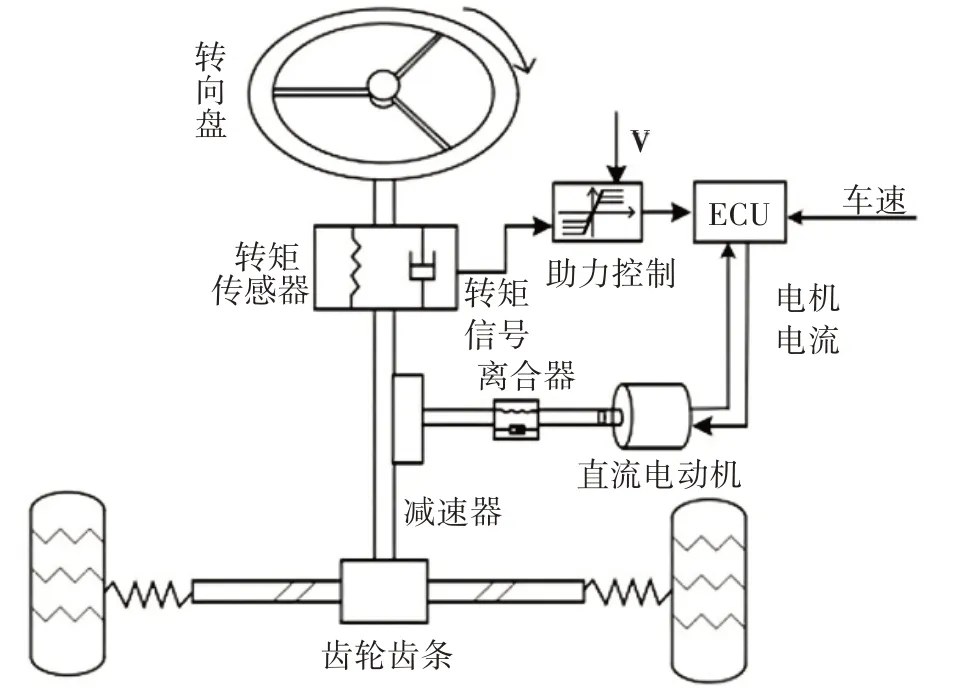
圖1 EPS系統結構圖
當汽車轉向時,轉矩傳感器和前輪速度傳感器分別把轉向柱扭矩轉角信號、車速信號發送給助力控制ECU,根據預先存儲的助力數據,從而使助力電機發出適度輔助扭矩,通過減速機構減速增扭后傳送給機械轉向單元,助力駕駛員扭矩,抵消輪胎受到的轉向阻力,從而實現助力轉向功能。
2 EPS系統模型分析
電動助力轉向系統是一個復雜系統。為了便于研究,本研究將整個EPS 系統簡化為轉向盤及轉向柱、直流電動機、齒輪齒條轉向器、轉向軸,列出各部分的動力學微分方程,見式(1)至式(4)。

式中:Js、Bs、Ks、θs分別為轉向盤及轉向柱的轉動慣量、阻尼系數、扭轉剛度和轉角;Td為轉向盤的輸入力矩;Je、Be、Ke、θe分別為下轉向柱的轉動慣量、阻尼系數、扭轉剛度和轉角;Mr、Br、Kr、Xr分別為齒條質量、阻尼系數、剛度和移動量;Rp為小齒輪分度圓半徑;Jm、Bm、Km、θm分別為電機轉動慣量、阻尼系數、軸扭轉剛度和轉角;G為減速機構減速比;Tm為助力電機助力矩[3]。
3 EPS系統助力特性曲線
隨著車速的增大,轉向阻力矩則減小,助力電機的輸出力矩也隨之降低。本研究選取扭矩傳感器的扭矩信號和車速信號為輸入信號,利用Matlab軟件中的Fuzzy工具,經過模糊化、模糊推理和反模糊化過程(見圖2),選取目標電流為輸出變量來優化設計助力特性曲線。
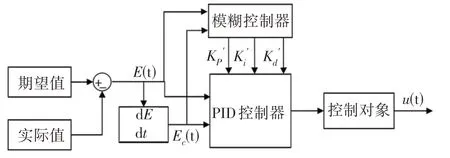
圖2 模糊PID控制框圖
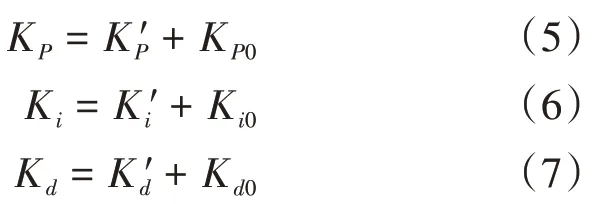
模糊自適應PID控制是利用模糊規則對PID控制參數進行實時調整,從而實現良好的動態性和真實的操縱性相結合。本研究根據駕駛環境和轉向工況的變化,對PID 控制的原始參數KP0、Ki0和Kd0進行實時調整,設計一款基于模糊自適應的PID 控制器,實現對動態控制參數K′P、K′i和Kd0輸出的動態調整。PID 控制器的3 個實控參數經過整定后分別用KP、Ki和Kd來表示[4]。3 個參數之間的關系見式(5)至式(7)。
目標電流論域設定為(0,20),車速論域設定為(0,80),扭矩論域設定為(1,8),模糊語言可設定為{Z(零),QS(相當小),S(小),M(中等),B(大),QB(相當大),GB(最大)}(見表1)。
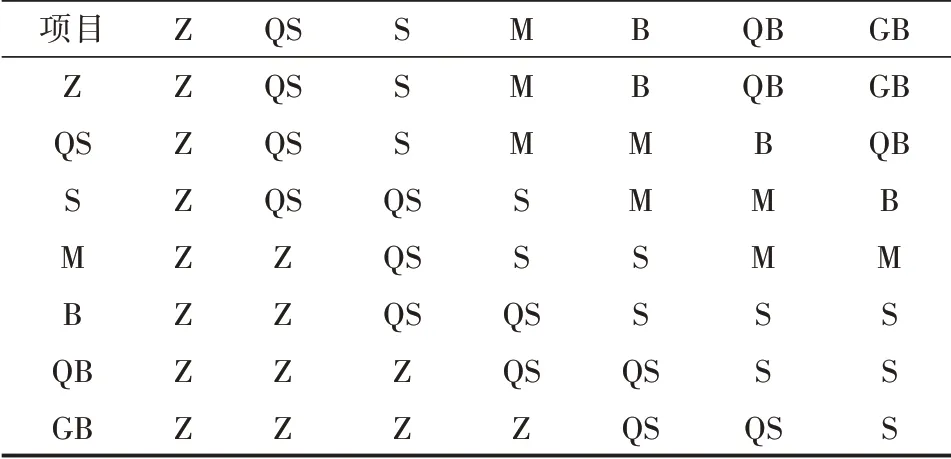
表1 助力特性曲線模糊規則
4 CarSim與Simulink聯合仿真建模
在對模糊自適應PID 控制研究的基礎上,確定模糊自適應PID 的控制器模型。在助力特性曲線上選定合適的目標電流I0和直流電機實際工作電流I作為模型輸入,對PID 的3 個實控參數KP0、Ki0和Kd0進行初始化,輸出的是直流電機的端電壓Uzl[4]。整合EPS 系統各模塊后建立Simulink 模型,比較PID控制和模糊自適應PID控制兩種方法的目標電流與實際電流之間的動態差別。
CarSim 采用輸入特性參數來代替實體建模和結構分析,并結合Simulink 模型建立整車聯合仿真模型。Simulink 接收CarSim 模塊傳來的前輪轉角、側向力、車速等信息,計算回正力矩和轉向盤轉角,反向傳遞給CarSim 模塊(見圖3)。結合回正和轉向兩種工況的要求,不斷改變轉向盤上的轉矩,驗證設計出的EPS系統控制策略是否合理。
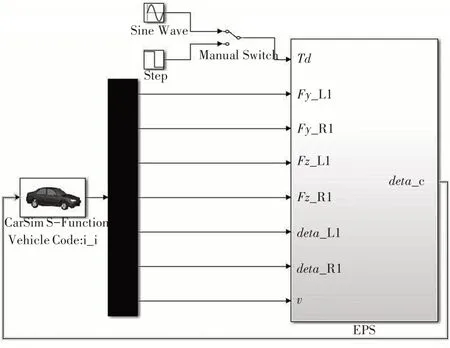
圖3 EPS系統Simulink與CarSim仿真模型
5 EPS系統控制策略仿真分析
5.1 轉向輕便性仿真分析
按照《汽車操縱穩定性試驗方法》(GB/T 6323—2014)的要求,設定雙紐線行駛路線,通過記錄轉向盤轉矩和轉角的數據來驗證助力控制策略及控制算法的有效性。將車速設為10 km/h,輸入不同的正弦角來對模糊自適應PID 控制、PID 控制和沒有轉向助力控制下轉向盤轉矩與轉角的關系進行分析(見圖4),驗證其轉向輕便性能的優劣。

圖4 轉向輕便性對比
由圖4 可知,轉向盤的扭矩值在轉向盤轉角為450°時最大。采用助力控制后,轉向盤扭矩值明顯減小:PID 控制降低46.2%,模糊自適應PID 控制降低54.9%。
5.2 回正性能仿真分析
按照《汽車操縱穩定性試驗方法》(GB/T 6323—2014)中的要求,在車速為20 km/h、50 km/h和80 km/h時(見圖5、圖6、圖7),分別加載階躍扭矩到轉向盤上,調整轉向盤角度為120°,穩定3 s后松開轉向盤,通過轉向盤轉角隨時間的變化來驗證不同車速工況下EPS的回正能力。
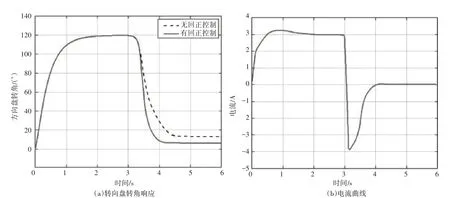
圖5 20 km/h時的轉向盤轉角響應和電流曲線
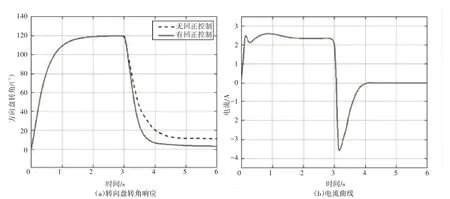
圖6 50 km/h時的轉向盤轉角響應和電流曲線
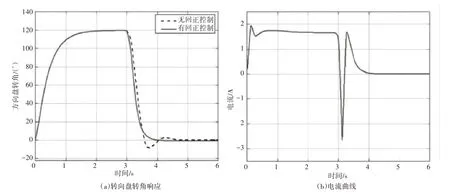
圖7 80 km/h時的轉向盤轉角響應和電流曲線
仿真結果表明,在中低速回正時,EPS 系統在收到扭矩響應信號后3 s 內電流突變,系統處于助力控制過程,隨后轉向盤的轉角趨于穩定,電流也逐漸穩定。3 s 后,轉向盤進入回正過程,轉向扭矩突變為零,回正電流迅速增大到最大值。在高速回正時,采用PD 回正控制,沒有出現超調現象。在轉向時,駕駛員施加在轉向盤最大扭矩值在無助力控制、PID 控制和模糊自適應PID 控制下依次減小,這說明在采用轉向控制后,轉向盤輸入扭矩明顯降低,實現了對轉向輕便性的改善。
6 結語
本研究對EPS 系統各部分模塊進行整合,使用PID 控制和模糊自適應PID 控制方法,設計了助力電機電流控制器的模型,建立EPS 系統的Simulink與CarSim 仿真模型,仿真分析EPS系統在回正和轉向狀態下的轉向輕便性和回正性能,對控制策略的合理性進行分析和驗證。仿真結果表明,設計的控制策略滿足EPS 系統的要求,實現了轉向盤快速回正,沒有回正超調現象,在提升回正性能的同時,也滿足了轉向輕便性的要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語世界(2022年9期)2022-10-18 01:11:18
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
商周刊(2017年17期)2017-09-08 13:08:58