路面連續激光點云中車轍三維特征提取方法研究
2022-08-03 09:41:38劉如飛柴永寧
公路交通科技 2022年6期
關鍵詞:特征
劉如飛,柴永寧,陳 敏
(1.交通運輸部公路科學研究院,北京 100088; 2.山東科技大學 測繪與空間信息學院,山東 青島 266590)
0 引言
由于受各類自然環境影響,在行車荷載作用下瀝青路面容易發生局部變形,輪跡帶逐漸變形下凹,兩側鼓起形成車轍。車轍會使得路面平整度下降,影響行車安全[1-2];同時車轍削弱了路面整體強度,會進一步誘發其他路面病害。因此,路面車轍病害的監測預防至關重要。
傳統車轍測量多利用人工直尺法或包絡線法對斷面車轍深度進行分析,兩種方法利用推包和推波產生的波峰、波谷進行測量,會存在一定誤差[3-5]。目前,國內外對于路面病害的檢測正由人工測量向移動測量轉變。通過移動測量系統快速獲取海量路面激光掃描數據,能夠高效準確地進行路面病害檢測,為公路養護管理提供數據支撐[6-7]。
吳智山等[8]利用單點激光器的測量方法采集路面斷面數據,設計并開發出相應的車轍測量儀器,通過對系統測量誤差進行研究分析,證明了共梁式非均勻分布13點激光器用于車轍檢測的可行性[9-12],但由于點數有限,密度較小,導致道路橫斷面數據不連續,同時檢測車的行駛偏移也會導致車轍測量誤差;Tsai等[13]通過控制路面橫斷面上點的數量,研究了橫向點的數量與車轍斷面提取精度的關系,證實了橫向點數量對車轍斷面提取精度的影響;馬榮貴等[14]進一步深入研究橫向點的密度對車轍斷面提取精度的影響,得出了隨著傳感器數目的增加,車轍測量最大誤差在橫向輪廓點的數量小于21時減小較快,大于33時衰減緩慢的結論;李清泉等[15]使用Delaunay三角網進行標定點建網與激光掃描線物方坐標解算的方法快速獲取足夠密集的車轍橫斷面剖面線,用于車轍分析;洪梓銘[16]和孫權[17]等則根據激光掃描數據的坐標分布特征生成特征圖像,基于圖像處理技術快速獲取車轍等路面病害信息。
針對上述問題,本研究提出了一種基于連續激光點云的路面車轍精細三維特征提取方法。考慮到圖像像素相對于離散點云較好的連續性和二維圖像處理相對于三維點云數據處理的高效性,本研究根據正常路面和車轍目標的空間分布差異生成多元化特征圖像,綜合運用圖像處理和點云擬合分析方法提取車轍平面輪廓線和橫斷面輪廓線,進行車轍精細三維特征表達。
1 車轍精細三維特征提取
以車道標線為邊界約束,從路面點云中提取單車道點云,作為提取車轍精細三維特征的基礎數據。路面點云數據及車道標線如圖1所示。
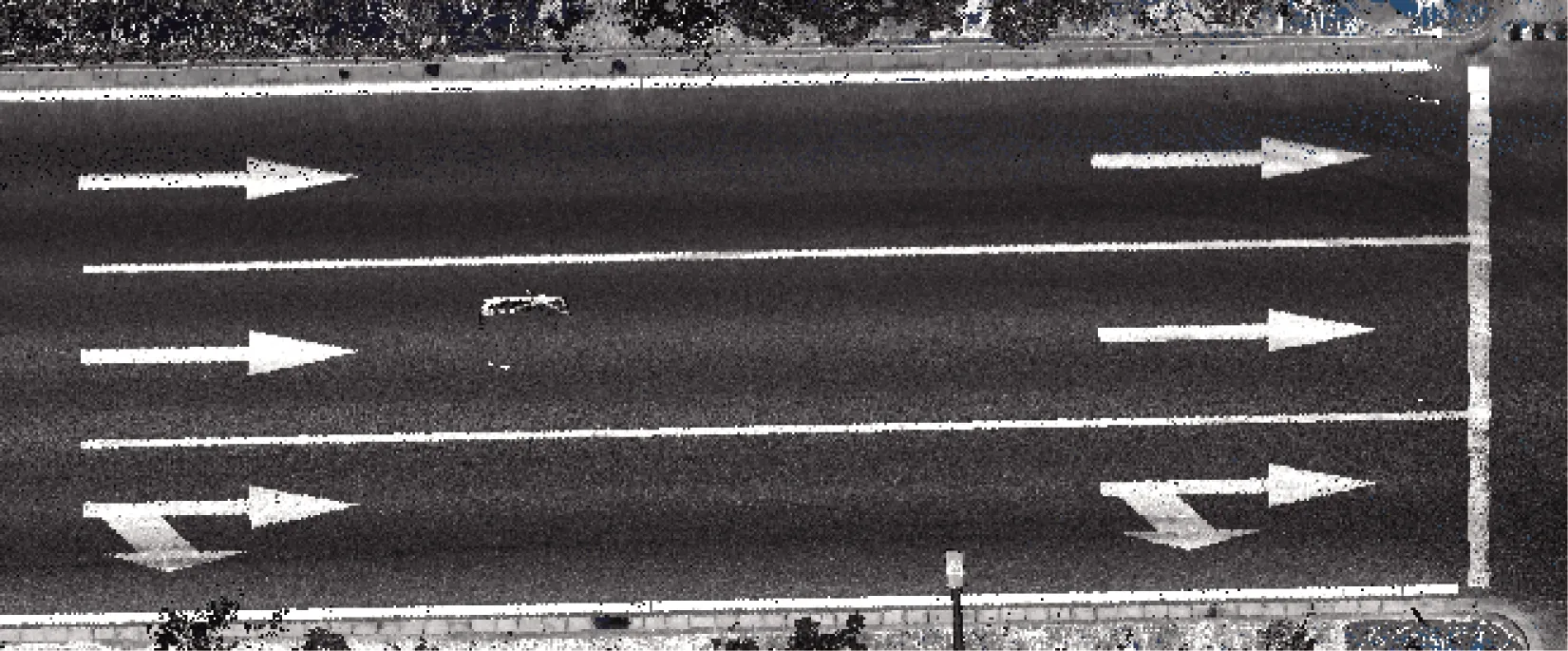
圖1 原始點云數據(強度)Fig.1 Original point cloud data (intensity)
方法為首先將路面激光點云數據處理轉化成高程特征圖像、坡度特征圖像和坡向特征圖像,基于圖像提取車轍平面輪廓線;再基于斷面密集的激光掃描線點精細提取車轍輪廓邊界點和斷面輪廓線;最后運用精確輪廓點修正平面輪廓線,實現車轍精細三維特征表達。路面車轍精細三維特征提取流程如圖2所示。
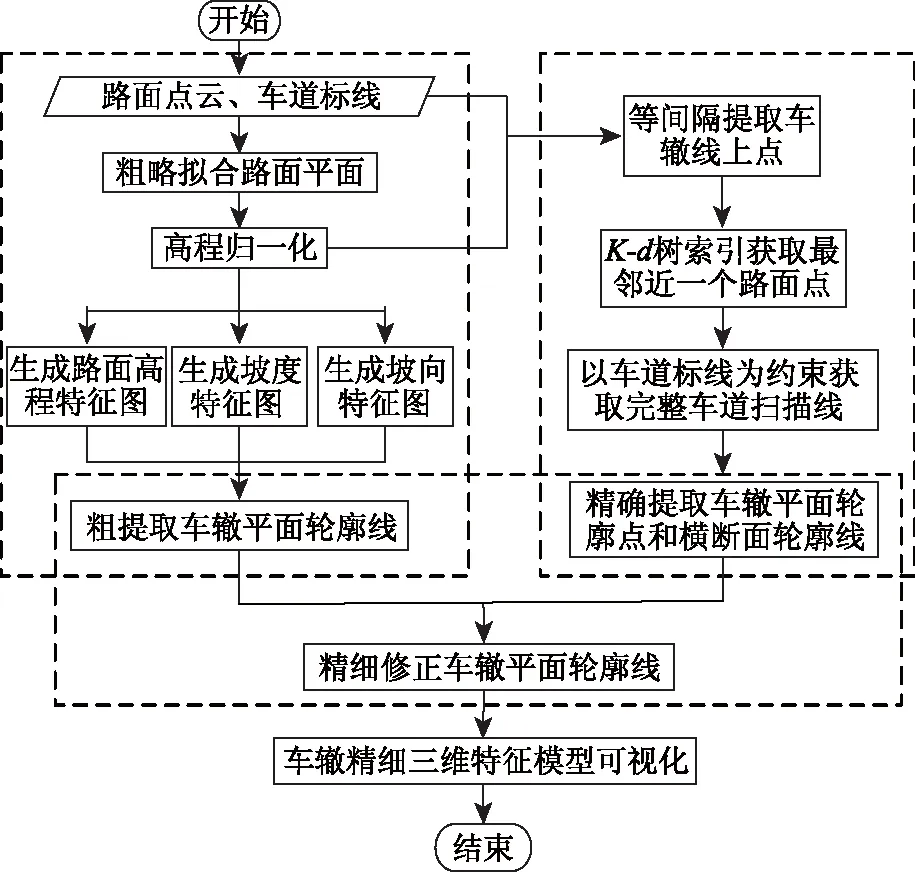
圖2 路面車轍精細三維特征提取流程Fig.2 Flowchart of fine 3D feature extraction of pavement rutting
1.1 基于特征圖像的車轍縱向平面輪廓線提取
(1)點云數據預處理
一般情況下,車轍特征表現為沿道路縱向為直線形,沿道路橫斷面方向為“w”形,有先下降后上升、再下降再上升的變化規律。為了消除路面橫向排水坡和縱向上下坡對車轍特征提取的影響,本研究采用多元線性回歸方法擬合路面平面并將點云數據高程進行歸一化處理,即將點云數據z坐標作為因變量,x和y坐標為兩個自變量,建立二元線性回歸模型,如式(1)所示:
z=b0+b1x+b2y+e,
(1)
式中,b0,b1,b2,e為平面方程系數。抽樣點云數據計算得路面平面方程一般式,如式(2)所示:
b1x+b2y+(-1)z+b0=0。
(2)
以該平面為約束,遍歷計算各點到該平面的距離,并以此作為點云的相對高程值。點到平面的距離計算方法如式(3)所示:
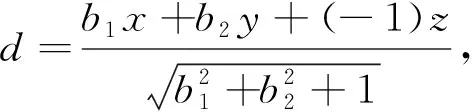
(3)
式中,x,y,z為路面點的三維坐標;d為路面點到擬合路面平面的距離,即歸一化后相對高程。
(2)路面特征圖像生成
獲取車道點云平面圖像投影范圍,即由xmin,xmax,ymin,ymax確定的最小外接矩形,設定像素分辨率Pixr和Pixc,其中Pixr和Pixc分別為圖像沿行和列方向的分辨率,由此計算圖像尺寸,計算公式如式(4)所示:
(4)
預設一張尺寸為Row行,Col列的空白圖像,遍歷計算點云各點在圖像中的位置,并將1個像素對應的多個路面點最小相對高程拉伸到uint8(0~255)灰階上,作為該像素的灰度值。點云到像素的坐標換算方法如式(5)所示:
(5)
高程到灰度值的拉伸計算方法如式(6)所示:
(6)
式中,zmax和zmin分別為歸一化后相對高程最大值和最小值。通過以上方法獲取路面高程特征圖像,進一步采用中值平滑方法進行濾波去噪,獲取更加平滑的路面高程特征圖像。
對路面高程特征圖像求梯度,梯度向量值作為路面坡度特征圖像對應位置的灰度值,生成坡度特征圖像;進一步將梯度向量方位角換算為灰度值填入路面坡向特征圖像對應像素位置,生成路面坡向特征圖像。路面特征圖像如圖3所示。
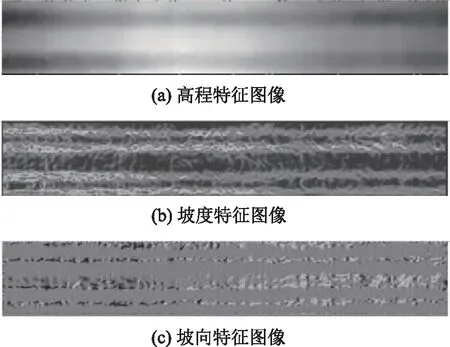
圖3 路面特征圖像Fig.3 Pavement feature images
(3)車轍平面輪廓線提取
車轍位置特征圖像像素灰度值特征如表1所示,高程特征圖像中由路面到車轍底點呈倒“S”形變化,由車轍底點到路面點呈現“S”形變化,“S”或倒“S”形腰部處為高程特征圖像橫斷面拐點。對高程特征圖像求二階導并對二階導圖像二值化:二階導數為0處即為高程特征圖像橫斷面拐點,其灰度值為1,其他位置灰度值為0。坡度特征圖像中路面和車轍底點處坡度較小,車轍側壁與路面點交匯處有突變,與車轍底點交匯處有突變。對坡度特征圖像進行二值化:以坡度特征突變處為1,其他位置處為0。坡向特征圖像中路面點由于其平坦度和破損的粗糙度呈現各方向差異性,車轍側壁由于上下坡方向相反,呈現明暗分布,下坡灰度值較小,呈灰色,上坡灰度值較大,亮度較高,車轍下坡和上坡過渡處即車轍底點,坡度接近0或2π。對坡向特征圖像求導生成二值圖:以導數突變處為1,其他位置處為0。
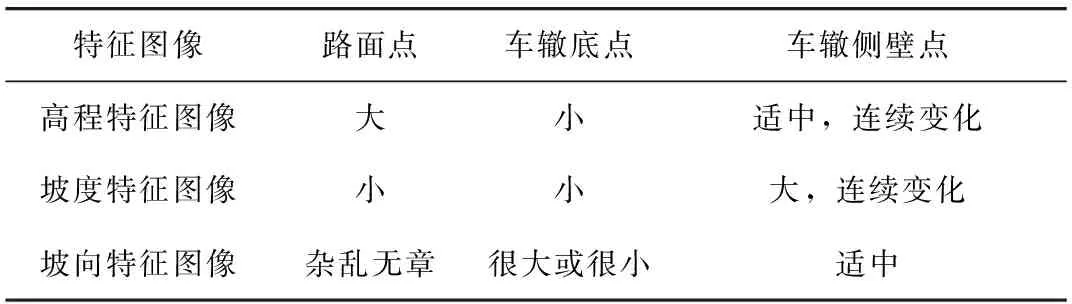
表1 車轍不同位置處特征圖像像素灰度值特征Tab.1 Gray value characteristics of feature image pixels at different positions of rut
將3種特征圖像生成的二值圖疊加顯示,如圖4所示。圖中黑色線圖層為高程特征圖像提取結果,提取內容為車轍側壁中線;灰色線圖層為坡度特征圖像提取結果,提取內容為車轍側壁上下邊緣輪廓線;淺灰色線圖層為坡向特征圖像提取結果,提取內容為車轍凹槽底點連線及一些路面雜亂線。

圖4 特征圖像二值化結果Fig.4 Feature image binarization result
對特征圖像分析結果中黑色圖層進行縱向約束聚類分析,從上到下黑色線依次編號為①,②,③,④。首先濾波去除孤立點或較小線段;其次通過區域生長獲取任意1條曲線上最長線段;最后通過曲線走向約束,采用連通性分析技術提取4條完整的曲線。
以黑色圖層4條曲線為約束條件,刪除灰色圖層中①號和②號側壁中線之間的部分,刪除灰色圖層中③號和④號側壁中線之間的部分;刪除淺灰色圖層中①號側壁中線以上部分,刪除淺灰色圖層中②號和③號側壁中線之間的部分,刪除④號側壁中線以下部分。
對余下灰色、淺灰色圖層分別再進行聚類、濾波、區域生長和連通性分析處理,最終獲取車轍平面輪廓線,如圖5所示。圖中類型Ⅰ的4條曲線表示為車轍凹槽上邊緣輪廓線;類型Ⅱ的2條曲線表示為車轍凹槽底部中線。

圖5 車轍平面輪廓線提取結果Fig.5 Extracted rutting plane contour line
1.2 基于掃描線點擬合的橫斷面輪廓精提取
路面激光點云采用連續掃描線方式采集,掃描線上相鄰點間距可達1 cm,任一點均存儲掃描線編號,進而可快速獲取該掃描線上其他所有點;然后通過中值濾波,去除掃描線上噪聲,獲取平滑的路面橫斷面掃描線點。
對平滑后掃描線密集點進行曲線擬合分析,通過曲線求導獲取4個拐點即車轍凹槽側壁邊緣的輪廓點;以同側車轍兩個車轍凹槽側壁邊緣點為約束,位于兩點之間且一階導數為0 的點即為車轍凹槽底部中線點,如圖6中的大圓點所示。
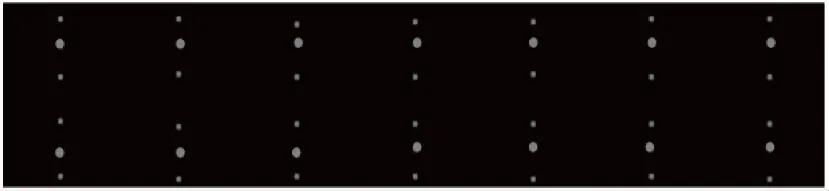
圖6 車轍凹槽輪廓點精細提取結果Fig.6 Extracted fine rutting groove contour points
以車轍凹槽側壁輪廓點為約束,將車轍凹槽側壁輪廓點之間的掃描線點擬合為曲線,作為車轍斷面輪廓線。
1.3 車轍平面輪廓線的修正
基于特征圖像的輪廓錢提取方法能較好地保留道路縱向線狀分布特征,但車轍凹槽側壁邊緣輪廓線和凹槽底部中線提取位置存在不準確的問題,因此還需運用精確提取的車轍凹槽側壁輪廓點和凹槽底部點對其位置進行修正。將車轍平面輪廓線進行分段處理,然后計算分段范圍內精確的輪廓點到待修正輪廓線的平面距離,對距離差值進行最小二乘平差擬合,獲取輪廓線上不同位置的修正參數,進行邊緣輪廓線和凹槽底部中線的修正。
最后用修正后的車轍凹槽側壁邊緣線、凹槽底部中線和車轍橫斷面曲線共同表達車轍精細三維特征。車轍精細三維特征表達效果如圖7所示。其中底面為初始路面點云,Ⅰ號標記線為車轍凹槽側壁邊緣線,Ⅱ號標記線為車轍凹槽底部中線,垂直于Ⅰ,Ⅱ的標記線為車轍斷面輪廓線。
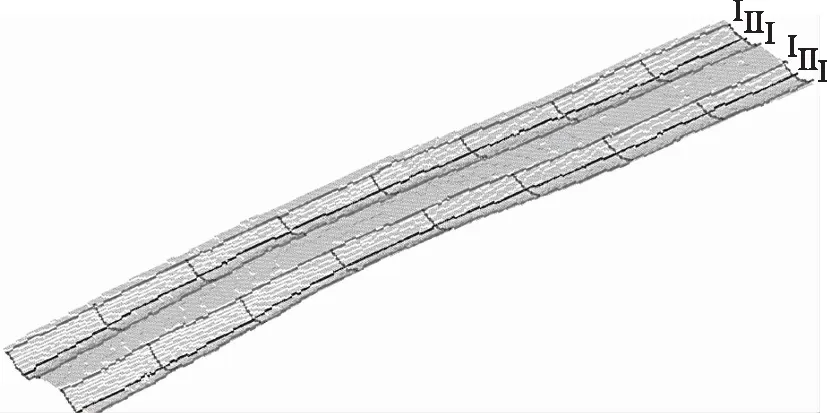
圖7 車轍精細三維特征表達Fig.7 Expression of fine rutting 3D feature
2 試驗結果與分析
本研究以車載激光移動測量系統采集的某道路路面連續激光點云數據為基礎進行試驗驗證。獲取任意位置的4個橫斷面,以連續激光點云掃描線橫斷面為分析對象,分別用傳統方法和本研究方法提取車轍橫斷面,按照文獻[18]的方法計算單個車轍寬度、深度和橫斷面面積并進行比較分析。
提取某斷面位置的點云數據,生成標準斷面,如圖8中菱形標志曲線所示;用傳統方法獲取的路面相對深度,生成斷面曲線,如圖8中三角形標志曲線所示;本研究方法以車轍平面輪廓為限制條件獲取擬合后的斷面,如圖8中圓形標志曲線所示。
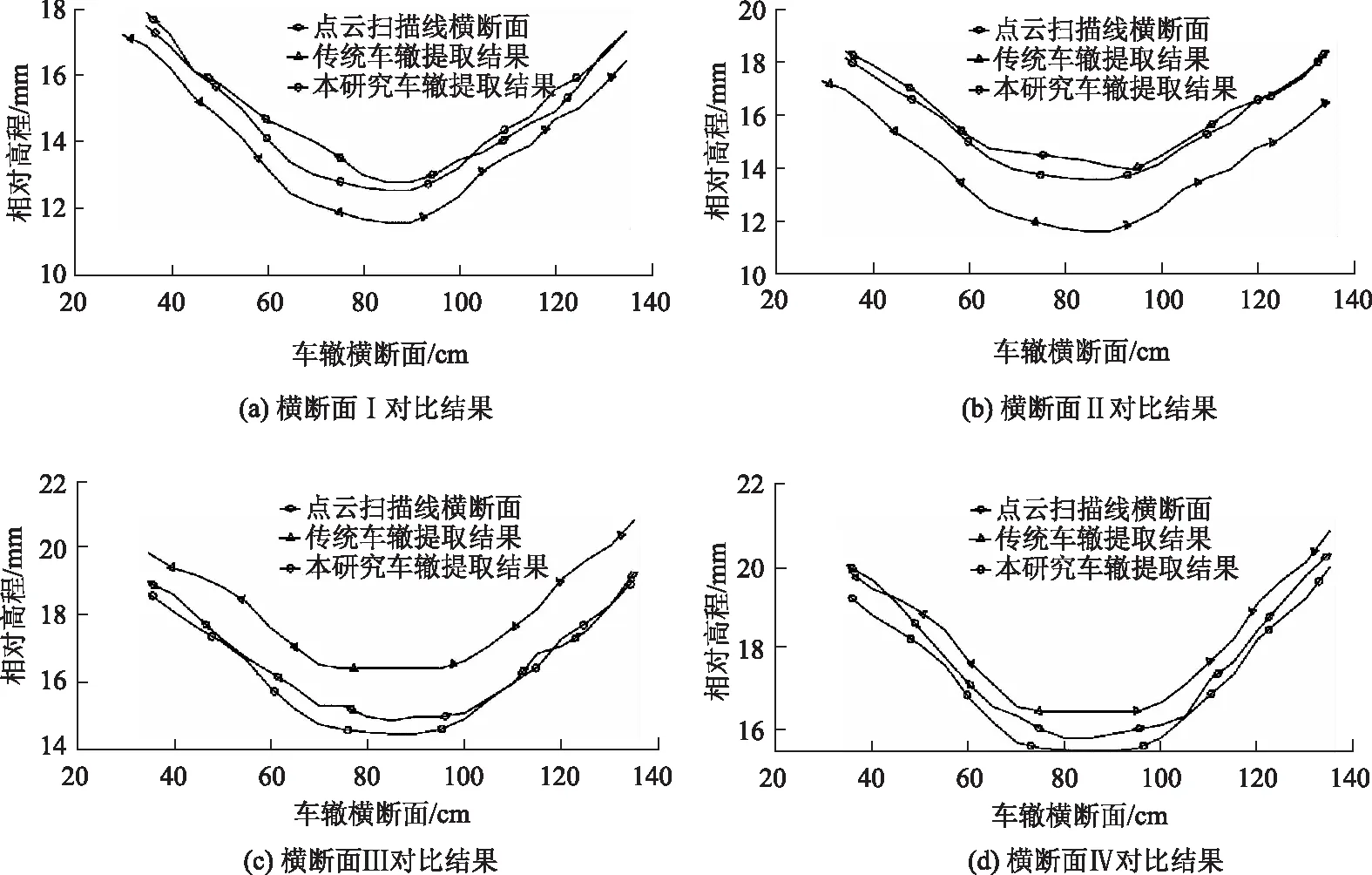
圖8 車轍橫斷面曲線對比Fig.8 Comparison of rutting cross-section curves
對上述方法生成的車轍斷面進行信息提取,將傳統方法及本研究方法的提取結果與基于點云的直接提取結果進行對比,如表2所示。兩種方法提取的車轍寬度都不超過4 cm,相對誤差小于5%;傳統方法提取的車轍深度與點云斷面提取結果的差值大于1 mm,而本研究方法提取結果的差值小于0.5 mm,采用本研究方法提取的車轍深度信息明顯優于傳統方法;對于車轍橫斷面面積的提取結果,傳統方法與點云斷面提取結果差值的相對誤差多數超過10%,而本研究方法提取結果的相對誤差基本小于10%,優于傳統方法。
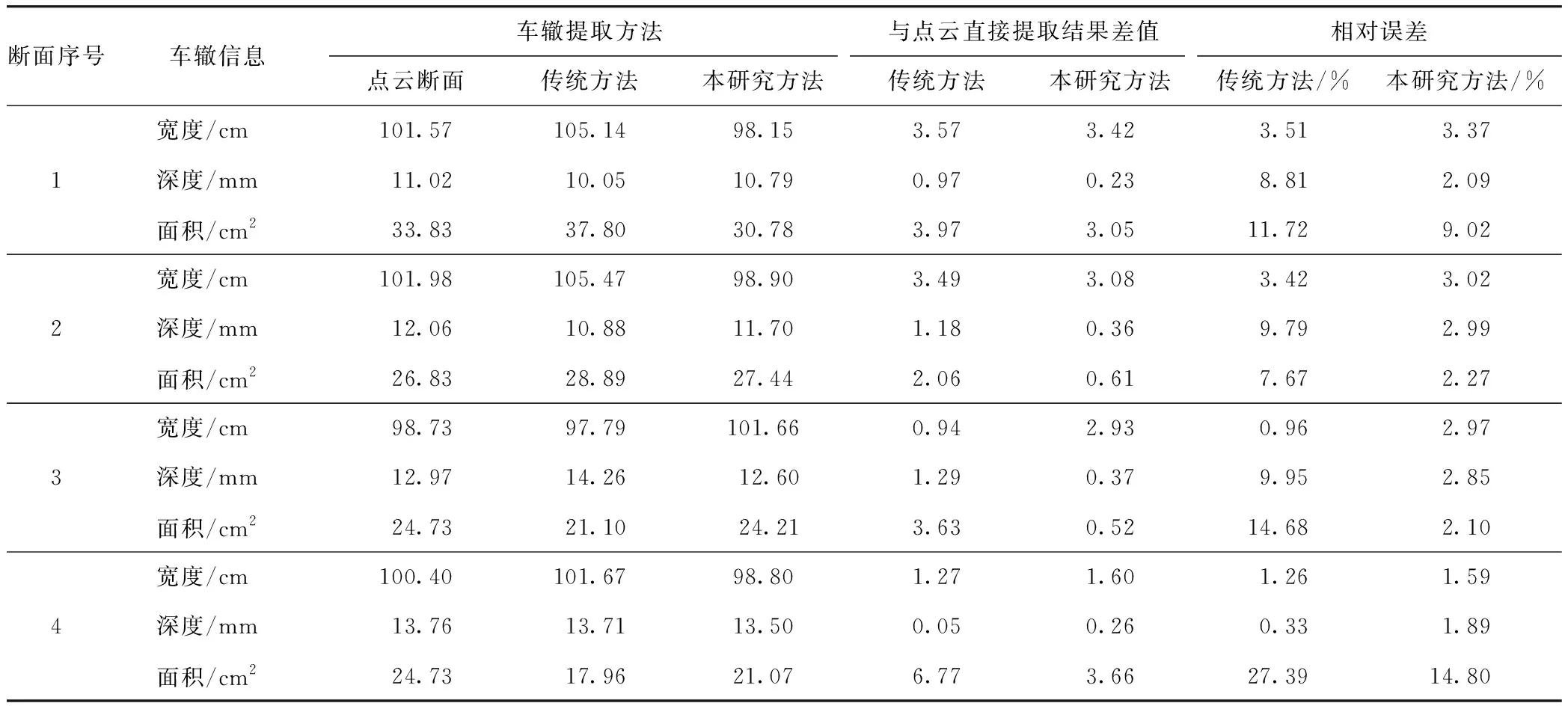
表2 不同方法的車轍提取結果對比Tab.2 Comparison of rutting extraction results obtained by different methods
3 結論
針對傳統斷面法提取車轍存在縱向分布信息缺失的問題,研究了一種基于多元點云特征圖像的車轍精細三維特征提取方法。該方法充分挖掘了路面連續激光點云數據中車轍目標的空間分布特征信息,并將三維點云數據轉化為二維特征圖像進行處理,既降低了數據的復雜度,也綜合運用了多種穩健的圖像處理方法。最終利用提取的車轍平面輪廓線和橫斷面輪廓線共同表達車轍三維特征,為車轍病害的精細化檢測提供了可行的方案。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38