基于物聯網監控的智能驅鳥器設計
2022-08-04 09:27:50丁宇浩溫權龍管子虞谷海清
實驗室研究與探索 2022年3期
丁宇浩, 李 棟, 溫權龍, 管子虞, 高 強, 谷海清
(天津理工大學 電氣工程與自動化學院,天津 300384)
0 引 言
根據南方某地區近20年來電網輸電線路跳閘故障情況統計發現:該地區電網年均鳥害故障發生率達10%左右,鳥害已成為僅次于雷擊災害的輸電線路跳閘第二大原因。研究發現:鳥巢故障成為鳥害故障的首要故障類型[1-2]。鳥類筑巢所用材料會破壞輸電線路的保護措施,加大導電和引雷等意外地發生極易引起線路短路,鳥類在變壓器之間穿梭等行為容易撞擊電線造成輸電受阻的現象,啄食復合絕緣體引起線路故障和排泄的糞便造成的閃絡效應,嚴重危及電網安全運行,給能源部門和人類生產、生活造成重大經濟損失[3]。研究能夠高效驅趕鳥類的設備十分有必要。
目前市場上已有的驅鳥設備,如超聲波驅鳥器、激光驅鳥器、防鳥刺、反光風鏡驅鳥器等[4-5],這些設備都存在不足,可以歸納為以下幾點:
(1) 電子驅鳥器生產成本高,工作耗能大,且工作模式單一;
(2) 普通驅鳥刺和反光風鏡不能有效克服鳥類的適應性;
(3) 容易受自然環境的影響而損害,同時傳統驅鳥器無法及時回饋故障信息,需要工作人員進行巡邏和檢查[6];
(4) 缺乏針對性,針對不同工作環境,同一種驅鳥手段不一定能發揮相同的驅鳥效果。
經資料查證:鳥類和人類的聽力范圍存在差異,人類很難感應到超過20 kHz的聲波,但鳥類可以察覺到20 kHz以上的聲波,20~35 kHz的聲波會使鳥類產生不適[7],在空曠且人跡稀少的鄉間和山林,采用鳥類天敵的聲音可以更好地驅鳥;在晚上,采用高亮LED閃爍的方式驚嚇靠近的鳥類[8-9],也可以達到很好的驅鳥效果。為針對不同環境如何高效驅鳥,同時又能保護驅鳥器免遭損壞,綜合現存驅鳥產品的優點并了解了鳥類的生活習性,研究開發了一個以太陽能為主要供能方式,多普勒雷達探測[10-11],多種環境模式切換以及可人為遙控的嵌入式智能驅鳥器。智能驅鳥器依靠嵌入主控芯片控制,設備經過插接不同的傳感器模塊可具有多種工作模式:城市環境、鄉間環境和山林環境等工作模式,所有驅鳥器都由統一的上位機進行遠程監視和遙控來實現區域化高效率驅鳥的目的。
1 硬件系統設計
驅鳥器設計采用STM32F407ZGT6作為嵌入式核心,微波雷達作為鳥類檢測模塊,使用太陽能板供電,以蓄電池儲電的方式為設備供電,采用雨水傳感器和光敏傳感器作為環境檢測模塊,以天敵的聲音、變化的頻率聲波和閃爍高亮的LED作為主要驅鳥手段,保證驅鳥器的智能性與實用性;結合物聯網技術,實現遠程監測設備運行狀況和記錄驅鳥情況。總體結構如圖1所示,實物連接如圖2所示。

圖1 硬件結構組成

圖2 智能驅鳥器實物
1.1 嵌入式最小系統
控制核心采用以Cortex-M4核心的STM32F407ZGT6芯片,控制核心模塊通過對各功能模塊進行綜合控制來實現驅鳥、采集驅鳥器工作狀態信息、傳輸驅鳥結果、顯示驅鳥次數等功能。同時也可滿足本系統要求的體積小、功耗低、工作穩定性好等特點[12]。
1.2 雷達模塊
雷達運動傳感器是利用多普勒雷達原理設計的微波移動物體探測器,額定工作電壓是(5±0.25) V,探測距離為2~16 m連續可調,發射頻率為10.525 GHz。電路原理如圖3所示。

圖3 雷達模塊電路原理
相對于紅外傳感技術,微波雷達傳感技術具有非接觸、抗雨霧粉塵等獨特優點,逐漸成為近程范圍檢測的一種重要傳感手段[13]。微波傳感器是檢測周圍物體反射的微波,然后將微小信號經過放大,再通過內部的比較電路將信號轉化為數字信號輸出,便于單片機處理。其多普勒頻率
式中:v為目標速;Ft為發射頻;c為光速;θ為目標移動方向與模塊軸之間的夾角。
雷達模塊具有抗干擾性能強,工作范圍大,檢測靈敏,穿透性強且不易損壞等特點,可實現快速準確地檢測一片區域內是否有鳥類靠近電線桿或電塔等輸電設施的功能。雷達探測的性能與傳統紅外探測對比見表1。

表1 微波雷達與紅外熱釋電傳感器性能比較
1.3 電源模塊
供能模塊主要由9 V 5 W單晶太陽能電池板,DC12V 4 A蓄電池通過穩壓電路與嵌入式主體進行連接,穩定輸出5 V電壓,電路原理如圖4所示

圖4 穩壓電路原理
通過太陽能板供電優點在于零污染,穩定性能強。蓄電池和太陽能板中間連接一個防反接保護二極管,可實現白天充電板向鋰電池內充電,夜晚蓄電池不會回流供給太陽能板的功能。穩壓變換器不僅可以調試出各種電壓測試系統的工作電壓,而且能保持電源穩定地向單片機和輸出模塊供電。
1.4 光敏模塊
光敏模塊的工作電壓為3.3~5 V,LM393基準器件具有信號清晰,波形好,轉向能力強的特點。輸出數字信號,如果環境光強度未達到指定閾值,則輸出電平為高;反之,則輸出電平為低。
1.5 擴音器模塊
擴音器模塊由特制的喇叭和功放模塊組成,可以發出20~25 kHz的聲波,也可以播放內存中的天敵叫聲。功放模塊板搭載有TDA2030A音頻功放芯片、喇叭接線座及可調電阻,可直接通過引腳輸入音頻信號,工作電源為6~12 V,電路原理如圖5所示。

圖5 功率放大電路原理
1.6 雨水模塊
雨滴傳感器采用雙面材料,用鍍鎳處理表面,具有對抗氧化、導電性及壽命方面更好的性能;使用寬電壓LM393比較器輸出,工作電壓為3.3~5 V。將天氣狀況轉成數字信號或模擬信號輸出,配電位器調節靈敏度。DO數字輸出連接單片機的AD口檢測是否有雨。
1.7 4G無線通信模塊
在物聯網通信模塊由ME906E 4G、MCU顯示屏和阿里云平臺服務器3部分組成。主控制板搭載了liteos[14]操作系統,該操作系統功能強大,任務執行效率高。驅鳥器上的ME906E模塊負責與阿里云平臺之間的通信,操作界面與工作數據可通過MCU顯示屏顯示。
2 軟件系統設計
為實現在不同環境中,驅鳥器既可減少對人的影響,又可在其所處地環境中最大程度地實現驅鳥效果,本設計根據同一區域不同環境中各種驅鳥效果的差異性,篩選針對不同環境的最佳驅鳥方式,并采用物聯網將這一區域的所有驅鳥器統一遙控,驅鳥器分類如下。
(1) 在城市。白天,驅鳥器通過雷達模塊檢測周邊是否有鳥類經過,如果檢測到鳥類,驅鳥器發出持續變頻率的超聲波來驅逐鳥類;晚上,驅鳥器自動轉換成夜間模式使用爆閃燈驅鳥,避免在城市中超聲波干擾人類休息和達到更好的驅鳥效果。同時,當遇到惡劣環境時,會切換至低功耗模式。
(2) 在鄉間。白天驅鳥器通過雷達檢測周邊是否有鳥類經過,如果檢測到鳥類,驅鳥器發出天敵的叫聲來驅逐鳥類;晚上,驅鳥器會自動轉換成夜間模式使用爆閃燈驅鳥。當遇到惡劣環境時,會切換至低功耗模式。
(3) 在山林。驅鳥器在正常工作環境中僅采用聲波和超聲波兩種手段進行驅鳥,當遇到惡劣環境時,會切換至低功耗模式。
其區域化網絡結構如圖6所示,系統功能結構如圖7所示。

圖6 區域化智能驅鳥網絡結構

圖7 驅鳥器系統功能
(1) 當驅鳥器開啟并處于城市工作環境模式。核心控制芯片會下達指令通過雷達模塊實時探測周圍是否有鳥類靠近。如果沒有鳥類靠近,在白天模式時擴音器會每隔15 s發出2 s的變頻超聲波來預防鳥類靠近;在夜晚,驅鳥器會切換成每隔15 s LED閃光燈會閃爍一次來達到相同的目的。如果雷達檢測到有鳥類靠近驅鳥器,白天驅鳥器會周期性輸出變頻超聲波進行驅鳥,直到鳥類離開雷達傳感器的檢測范圍;晚上,驅鳥器的LED閃光燈會周期性地閃爍直到鳥類離開檢測范圍,當驅鳥器處于惡劣天氣時,例如下雨天時,通過雨水模塊,主控芯片將驅鳥器從正常的工作模式轉為雨天的低功率模式,當周圍環境轉變成為可以正常工作的環境時,驅鳥器恢復到正常的工作模式,工作流程如圖8所示。
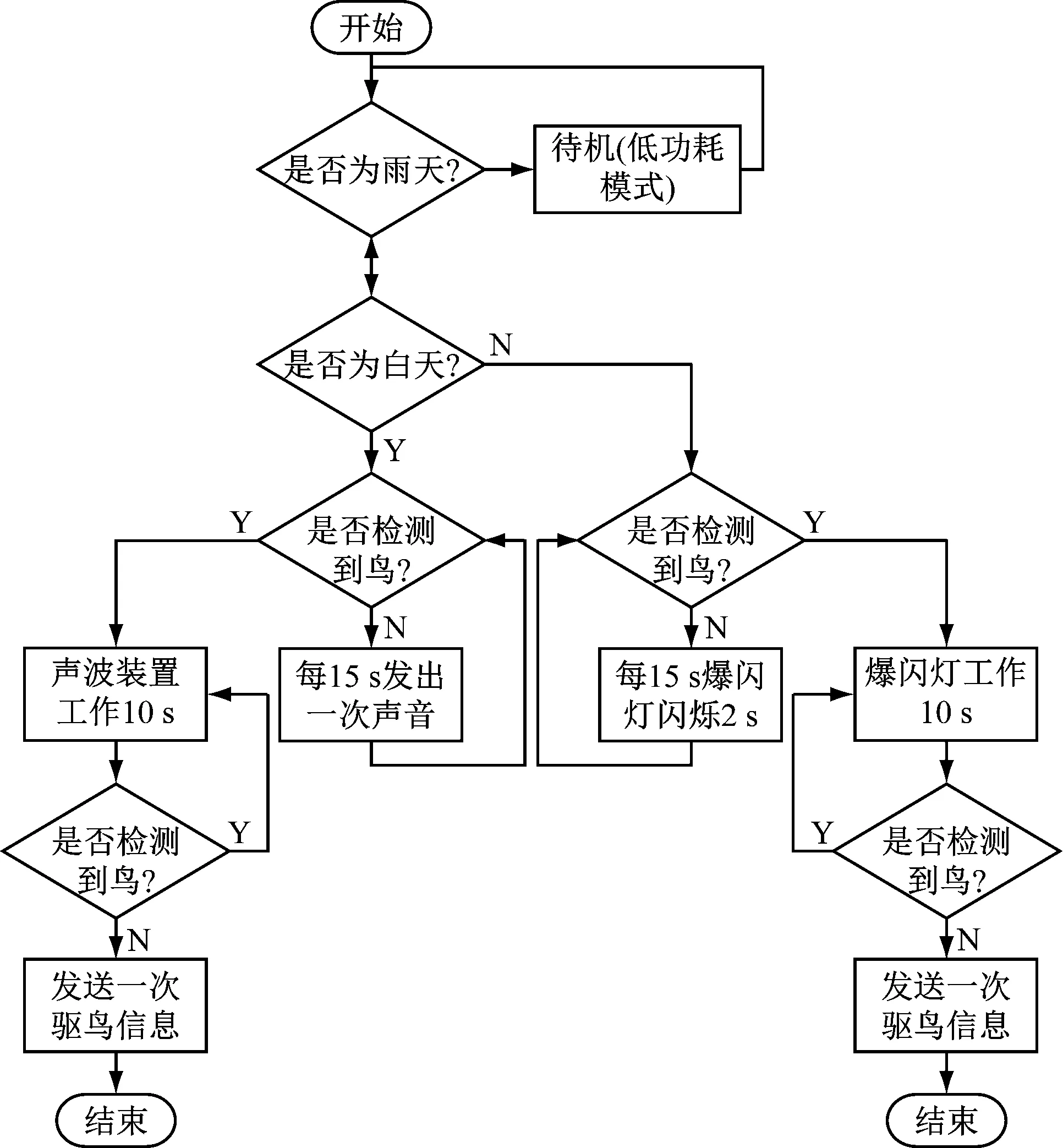
圖8 城市驅鳥器工作流程
(2) 當驅鳥器開啟并處于鄉間工作環境模式。與城市工作模式大致相同,鄉間工作模式驅鳥器將超聲波驅鳥方式改換成播放天敵叫聲的聲音驅鳥。白天沒有檢測到鳥類時,驅鳥器每15 s播放一次天敵的叫聲,當檢測到鳥類靠近時,驅鳥器會隨即切換天敵叫聲驅鳥,晚上的驅鳥模式與城市工作模式相同。
(3) 當智能驅鳥器開啟并處于山林工作環境模式。控制芯片會下達指令通過雷達模塊實時探測周圍是否有鳥類靠近。如果沒有,擴音器會每隔15 s發出一次的鷹的聲音來預防鳥類靠近,如果檢測到有鳥類靠近驅鳥器,驅鳥器會周期性輸出鷹的聲音和變頻超聲波進行驅鳥,直到鳥類離開傳感器的檢測范圍。當驅鳥器處于惡劣天氣時,例如下雨天時,通過雨水模塊,主控芯片將驅鳥器從正常的工作模式轉為雨天的低功率模式,當周圍環境轉變成為可以正常工作的環境時,驅鳥器恢復到正常的工作模式,工作流程如圖9所示。

圖9 山林驅鳥器工作流程
每進行1次上述3種驅鳥工作后,4G模塊便會向云端服務器發送一次驅鳥的結果信息,此信息會儲存在云端數據中用于記錄和參考。
3 遠程管理系統的實現
為實現遠程訪問,系統采用django、uwsgi和nginx在阿里云平臺[15]搭建一個可用公網訪問的網頁,負責管理人員通過上位機訪問網頁端對驅鳥器工作狀態進行控制,并采用圖表的方式查看驅鳥的統計數據。同時在阿里云平臺運行一個python腳本,該腳本程序負責接收驅鳥器發來的tcp鏈接與信息,將驅鳥器被觸發的次數,環境信息寫入數據庫進行統計,還可向驅鳥器發送消息,pyhon腳本還會與前端界面通信以此來獲取用戶與網頁端的交互信息并且直接將交互信息發送給驅鳥器,以此達到遠程監控和控制驅鳥器工作狀態,聯網工作流程如圖10所示。

圖10 通信功能
云端服務器不僅負責接收各地區不同功能的驅鳥器工作數據還可遠程操控驅鳥器:當驅鳥器遇到解決不了的問題或者出現驅鳥器錯誤工作情況,通信模塊會及時向上位機報警,上位機會遠程遙控驅鳥器重啟或者模式轉換;當某個單一的驅鳥器出現故障時,維護人員可通過上位機快速查找故障驅鳥器的位置進行維修,以減輕維修組需要定期巡邏的負擔。維修示意如圖11所示。
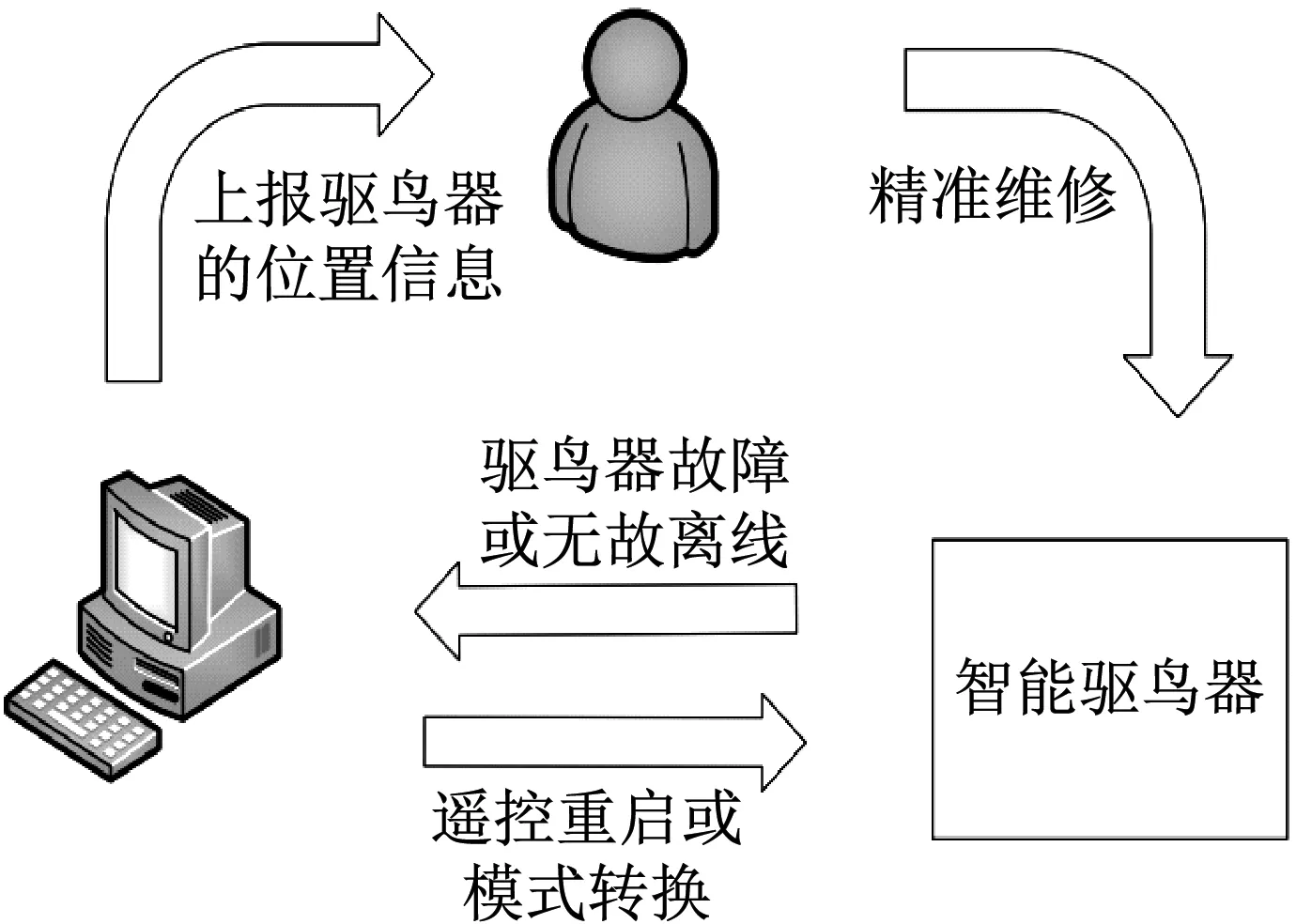
圖11 驅鳥器故障反饋
4 結 語
本設計實現了一種持久性、低功耗、高性價比、耐用、適用范圍廣的智能化自動化驅鳥設備,通過服務器進行后臺綜合管理。可以滿足山林地區的輸電線路和城鎮地區的輸電線路的不同環境,針對不同區域鳥類特點,模塊化構成不同驅鳥方式的設備單元,加強了驅鳥的針對性,提高驅鳥效果,保護輸電線路安全,為電力部門節約運維成本。經實際測試,系統運行穩定可靠,可滿足實際需要。
在未來還可將統計的數據做成大數據來統計鳥類的生活習性,觀測鳥類的生態并以此來提高驅鳥器的工作效率和為以后的驅鳥設備提供更好的參考資料。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02