基于機器視覺的六自由度機械臂分揀系統設計
2022-08-07 05:43:58陳思宇
內燃機與配件 2022年11期
0 前言
隨著科學技術的高速發展,傳統的依靠勞動力進行流水線分揀的工作已經遠遠達不到社會和企業的發展需求,而且基于人工分揀作業依靠的主觀因素過多,往往會使工作狀態起伏不定,最主要的是人工效率低下
,所以近些年來工業上開始選用傳統的機械臂進行分揀,但是傳統機械臂進行分揀時往往需要提前規劃好路徑和抓取的方向,最主要的是機械手不具備識別的功能,在工件混合放置的時候無法識別出特定的工件,但是機器視覺的提出很大程度上解決了這個問題,機器視覺主要依靠自身的自動化程度高的特點
,可以解決人工作業中難以處理的問題,在大批量生產工作中,可以使用機器視覺檢測和機器人技術代替傳統人工分揀工作,這樣不僅可以減少人為重復的工作,最主要的是可以提高生產效率和自動化程度
。故而本文提出一種基于機器視覺的六自由度機械臂快速分揀碼垛系統。該系統主要包括硬件系統的搭建和軟件系統的編寫與優化。
1 總體方案設計
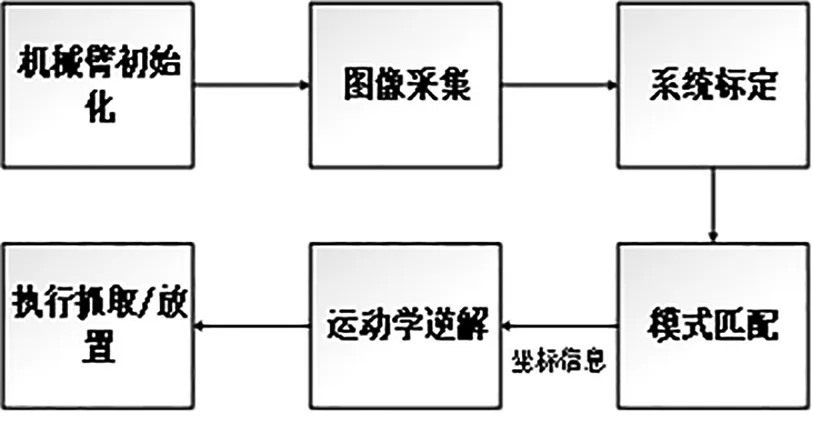
該系統主要是模擬流水線的分揀碼垛過程,其主要依靠傳送帶傳送物料,當物料到達轉向機構時,工業相機開啟,進行圖像采集,然后將采集到的圖像發送到LabVIEW上位機當中,通過模式匹配來進行物料的識別與定位,然后將識別出的中心位置坐標進行逆解,進而確定機械臂各關節的旋轉角度,將計算出的角度發送到Arduino下位機進行機械臂的抓取,然后再根據不同物料叉車事先放置的位置進行逆解,將逆解結果再次發送給下位機進行物料的碼垛,完成分揀過程。系統的總體設計方案如圖1所示。
2 系統硬件的選取與搭建
2.1 圖像采集設備
圖像采集設備是整個系統的“眼睛”,因此硬件的選型尤為重要,工業相機是本系統的重要組成部分,其主要工作原理通過A/D轉換將圖像信息存入到存儲器當中
,而鏡頭堪比人眼睛中的晶狀體,決定了圖像采集過程中的成像質量,同時光源的選取也同樣重要,合理的照明方案可以突出視場中的目標圖像,降低算法的難度,本系統所選取的圖像采集硬件均來自于杭州海康機器人技術有限公司,由于此系統是基于彩色圖像進行分揀,因此相機選取的是MV-CA050-10GC彩色相機,鏡頭焦距為12mm,為了更好起到均勻性的效果,光源選取的是面光,需要注意的是光源需搭配光源控制器一同使用。
2.2 機械臂
本系統機械臂所選用的是幻爾科技有限公司生產的LeArm機械臂,機身采用全鋁合金,整套機械臂一共使用了6個高精度數字舵機,使其具有六個自由度。爪子部分使用的是具有防堵轉功能的LDX-335MG標準數字舵機,當發生堵轉時,舵機會自動計時,當發現堵轉超過4分鐘時,舵機會自動停止工作
。接下來兩個舵機是LFD-06防堵轉低功耗的標準數字舵機。在云臺上面的兩個舵機是LDX-218高精度的雙軸數字舵機。最后底座上的舵機采用大扭力的LD-1501MG大扭矩舵機
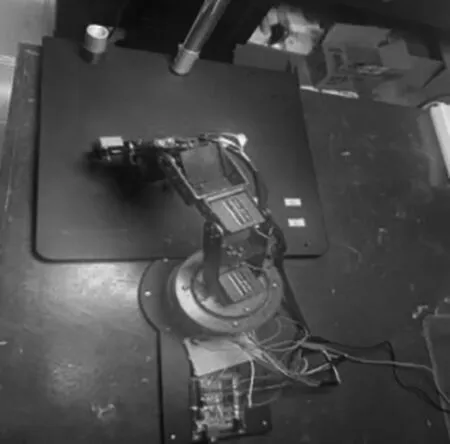
,它能旋轉180°。控制器選用的是Arduino UNO板卡,這種板卡適合于初學者使用,便捷靈活,最主要的是可以增加開發效率,該機械臂提供了上位機和手機APP多種控制方式,而且內置強大的逆運動學算法,可進行復雜運動操作,使夾取動作精準,并且支持多臺協作,搭建好的分揀系統如圖2所示。
利用T-text分析不同學制的研究生對于初級知識、中級知識、高級知識、初級技能、中級技能、高級技能、態度的差異情況,經過分析,不同學制研究生對于初級知識、中級知識、高級知識、初級技能、中級技能、高級技能、態度因素的P值均大于0.05,沒有顯著性差異。

3 軟件系統的設計與實現
3.1 軟件系統設計
在本系統中,標定問題主要涉及兩個方面即攝像機的標定和分揀系統的標定。攝像機標定主要是為了建立像素坐標系與世界坐標系的準確對應關系,然后確定圖像坐標系的原點位置與坐標軸方向,進而才能得出目標物體的中心坐標,由此得出的坐標才可進行運動學的逆解計算。
3.2 舵機的控制
工科新教師培訓動機缺失的直接結果是:不能夠將學科知識有效轉化為課程知識,不能夠將課程知識與工程經驗轉化為教學內容,不能夠將教學知識內化為教育思想或教育理念,不能夠將聽、說、讀、寫、交流等基本能力轉化為教學設計、教學組織與實施、教學評價的能力等。
3.3 相機快速標定算法的設計
本文主要選取LabVIEW進行軟件系統的開發,LabVIEW集成了數千款硬件設備,能通過直接使用大量內置函數庫實現高級處理
,做到與硬件設備的無縫銜接,而且針對Arduino板卡,NI公司專門推出LabVIEW Interface for Arduino工具包控制Arduino板卡的I/O數據的輸入與輸出,增加了編程過程的可視化,最主要的是此工具包增加了Arduino控制卡的功能,使其可以進行更多復雜的操作,而且NI Vision Development Module工具包集成了數百種機器視覺函數,幾乎覆蓋了機器視覺開發的各個方面,使機器視覺變得簡單易操作,最主要是的LabVIEW可以與MATLAB進行混合編程,利用MATLAB強大的計算功能,可以完成算法上的突破,從而提高整個系統的處理速度。
在本系統中將六個關節舵機采取并聯的連接方式,將六個舵機的控制程序寫成一個子程序即可,這樣可以占用更小的內存,加快運行速度,在調用的時候只需要改變輸入參數即可。舵機采取的是PWM信號進行控制的方式,可以通過改變輸入的角度進而改變機械臂的姿態,使其完成各種操作。LabVIEW Interface for Arduino的舵機函數庫使得Arduino編程變得更加簡單,只需要選擇好每個舵機與控制卡的接口對應關系即可,在程序運行的一開始需要初始化舵機,即使機械臂保持直立狀態,因此僅需要在子VI的六個關節輸入中輸入九十即可。
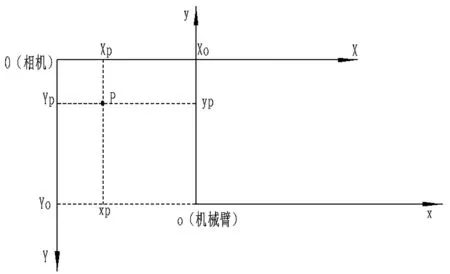
在LabVIEW中先進行簡單標定取兩個已知點將真實距離與像素距離進行轉換,然后選取圖像的左上角點為圖像原點即可完成攝像機的標定。而分揀系統的標定主要是指機械臂坐標系與相機坐標系的轉換,采用的快速算法如圖3所示,將機械臂置于視場中的某一已知點,其原點坐標相對于圖像坐標系為o(Xo,Yo),設平面中任意一點P的坐標為(Xp,Yp),那么在相機坐標系下的坐標為(xp,yp),則xp=-(Xo-Xp),yp=(Yo-Yp),由于工件始終在同一平面運動故Z軸始終不變。
開展小組競賽促進學習趕超 采用小組日記比賽的形式提高寫作興趣。一周內小組成員輪流寫一篇日記,我每天批閱打分,算出均分公布,表揚前三名。為了小組榮譽,每位組長都不遺余力為小組成員的日記修改潤色,力爭全體進步。我堅持選日記好的朗讀,分析表揚。小組成績捆綁在一起,各成員十分關注個人寫作成績,寫作氣氛濃厚。
3.4 彩色模式匹配和工件的定位
本系統主要是基于不同的顏色來進行分揀與碼垛,主要是用到的是彩色模式匹配,彩色模式匹配主要是基于目標圖像的色彩和空間分布特征來進行識別
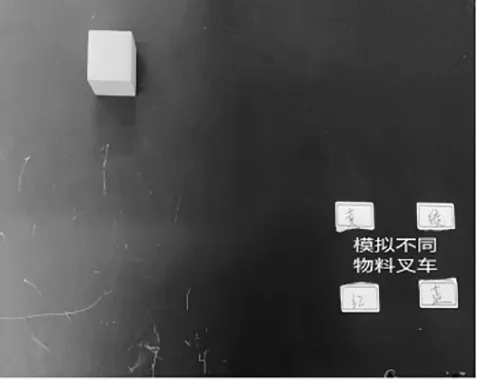
,通過學習模板圖像的色彩信息來快速定位目標圖像的中心位置坐標,它不僅能輸出與色彩模板相匹配的圖像區域個數,還能提供其在圖像中的準確位置和角度信息。一般來說,若要在待測對象與背景間的顏色區別非常明顯的情況下精確定位待測對象的位置,或者待測對象的灰度特征較難描述或與其他對象的灰度特征較類似的情況下,彩色模式匹配具有較強的優勢。本系統主要選取不同顏色的25mm×25mm×25mm的方塊來模擬不同的物料。在程序的一開始需要先讀取模板圖像,對模板的學習過程進行配置,在學習的過程中不僅要學習模板的顏色和形狀信息,還用同時對平移和旋轉保持不變性,然后對彩色模式匹配過程進行配置,最后根據相機獲取到的圖像,定位出目標圖像的位置,然后導出目標圖像的坐標位置到MathScript節點當中進行運動學的逆解
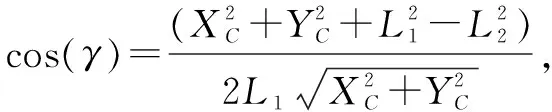
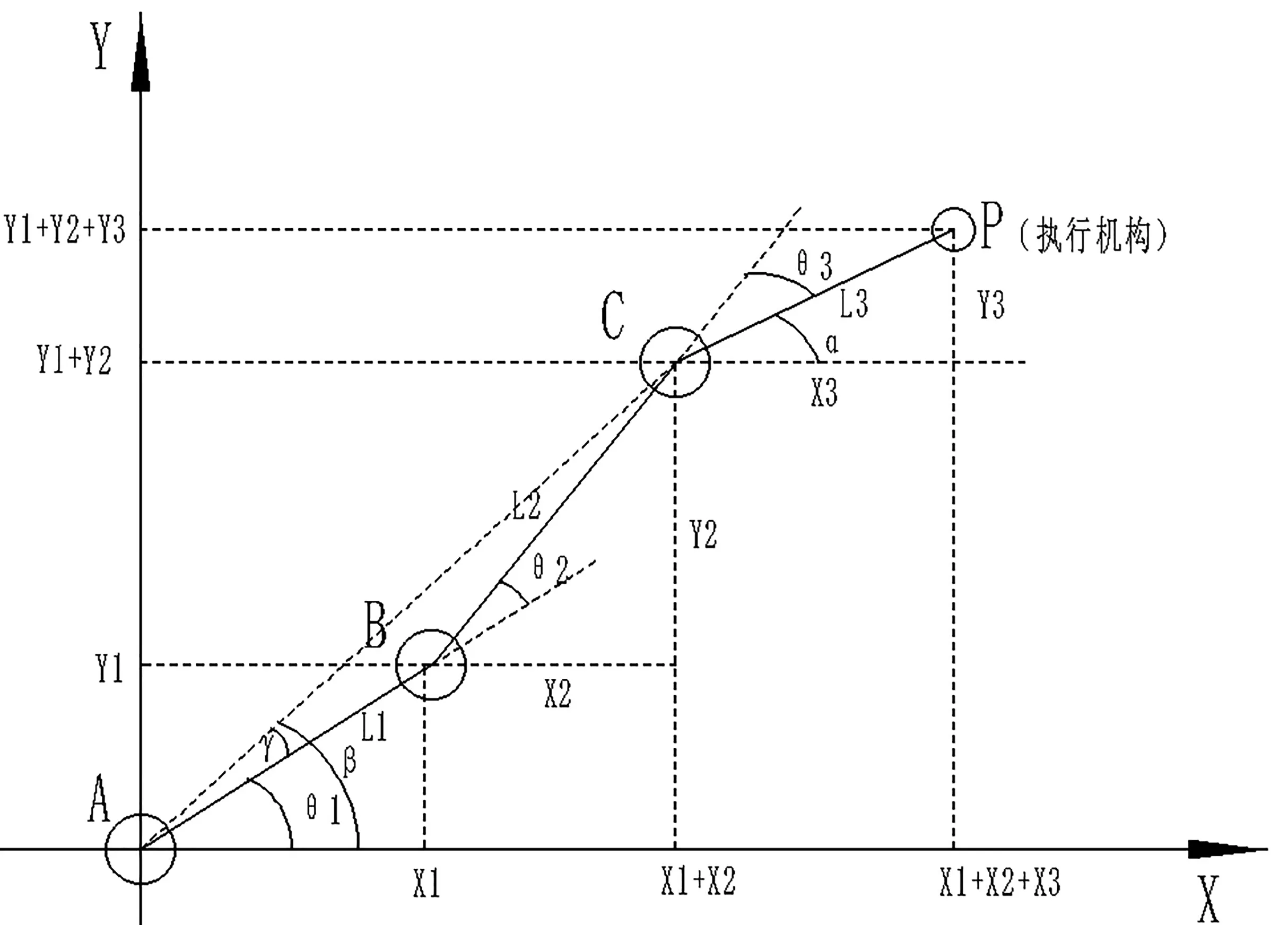
3.5 機械臂運動學逆解的求取及各關節實際運動角度的確定
?Prasenjit Duara,Why is History Antitheoretical?Modern China,Vol.24,No.2.Symposium:Theory and Practice in Modern Chinese History Research.Paradigmatic Issues in Chinese Studies,Part V(Apr.,1998),pp.105 ~120.
4 實驗驗證
在此系統中,模擬物料叉車的位置如圖5所示,首先根據模擬物料叉車的位置先計算出不同物料放置時各個舵機應旋轉的角度,將此角度寫入舵機子程序中,然后將機械臂初始化,使機械臂保持直立狀態。然后打開相機,進行圖片采集,然后對采集到的圖像進行分析,根據不同的模板,分析目標的顏色并找到目標圖像的位置,將位置坐標進行運動學逆解,逆解后算出來的角度發送發送到舵機子程序中進行機械臂的抓取,抓取過程如圖6所示,然后根據相機識別的物料結果進行放置,放置不同的物料叉車上調用不同的舵機子程序,放置過程如圖7所示。

5 結束語
本文圍繞基于機器視覺的六自由度機械臂分揀系統進行研究,在機械臂逆解過程中,通過簡化模型,進而簡化逆解的求取過程,使機械臂的逆解更加簡潔明了。在Arduino控制中,舍棄了傳統的基于C語言編程的方法,簡化為圖形化的LabVIEW編程方法,使得編程過程更加可視化。為了驗證本系統的快速性與準確性,進行了模擬流水線的搭建,結果表明,基于不同顏色的分揀系統物料識別與分揀的成功率為100%,時間為2.5s,能夠滿足物料分類的操作要求,實驗表明,該系統對于工業分揀具有較好的參考價值。
[1]張韋昱.基于視覺引導的分揀機器人[D].大連交通大學,2020.
[2]鄧超.面向智能物流的機械臂自主分揀系統設計[D].西安理工大學,2021.
[3]儲琴.基于機器視覺的工業機器人分揀控制系統探究[J]. 電子制作,2021,(04):41-43.
[4]劉福華.基于機器視覺的水果分級分揀系統關鍵技術研究[J].機電信息,2021,(28):56-56+60.
[5]江國強,謝安潔,漆虹琳,等.基于Arduino的舵機機械控制研究[J].企業科技與發展,2020(04):39-41.
[6]田如安,李筠,楊海馬,等.基于LabVIEW的機械臂實時動畫顯示系統[J].軟件導刊,2020,19(05):151-154.
[7]廖聰.基于汽車跑偏檢測系統對車輛行駛跑偏的原因和解決對策的研究[D].武漢理工大學,2012.
[8]閆夢濤.基于機器視覺的元器件實時檢測系統[D].浙江理工大學,2019.
[9]李金良,張斌,楊學順,等. 6R選矸機械臂運動學仿真分析[J].煤礦機械,2021,42(02):70-72